Изобретение относится к измерительным системам для оценки состояния поверхности взлетно-посадочных полос аэродромов, но может также использоваться для определения коэффициента сцепления дорожных покрытий.
Известен способ определения состояния взлетно-посадочной полосы с использованием транспортных средств. Эффективность торможения определяют обработкой результатов измерения расстояния или времени торможения. Автомобиль двигается с заданной скоростью, тормозится до остановки, при этом торможение осуществляют с полным юзом колес. По результатам измерений определяют состояние взлетно-посадочной полосы.
Недостатком известного способа является: большое количество исходных параметров математической модели процесса торможения, каждый из которых измеряют с различной точностью, и суммарная погрешность определения коэффициента сцепления достигает значительной величины. (Руководство по эксплуатации гражданских аэродромов Российской Федерации, приложение 6 - Методы и средства оценки состояния летного поля).
Другим известным способом определения коэффициента сцепления является способ, реализуемый аэродромной тормозной тележкой АТТ-2. Известный способ описан в Руководстве по эксплуатации гражданских аэродромов Российской Федерации (РЭГА, РФ-94, часть 3, приложение 6 и в Авторском свидетельстве №630982, кл. 01N 19/02).
Способ определения коэффициента сцепления заключается в следующем. Аэродромная тормозная тележка имеет два колеса: ведущее и измерительное. Колеса разных диаметров и соединены между собой редуктором. Соотношение диаметров колес обеспечивает пробуксовку измерительного колеса на 15-17%. Вследствие пробуксовки измерительного колеса образуется продольная сила сцепления F колеса с поверхностью аэродромного покрытия, которую измеряют датчиком силы. Коэффициент сцепления вычисляют по формуле
Ксцп=F/P,
где Ксцп - коэффициент сцепления колеса с поверхностью аэродромного покрытия;
F - продольная сила сцепления колеса с поверхностью покрытия;
P - нормальная сила нагрузки измерительного колеса на поверхность покрытия.
Недостатками данного способа являются: при измерении коэффициента сцепления требуется смачивание поверхности, что ограничивает использование данного способа в зимнее время. Из-за разницы диаметров ведущего и измерительного колес имеет место занос аэродромной тормозной тележки - появляется поперечная сила торможения, что увеличивает ошибку в определении продольной силы сцеплений F измерительного колеса с поверхностью аэродромного покрытия.
Наиболее близким к заявленному изобретению по технической сущности является "Способ определения коэффициента сцепления колеса с поверхностью искусственного покрытия", патент Российской Федерации 2442136, кл. G01N 19/02. Известный способ определения коэффициента сцепления имеет небольшее количество сходных существенных признаков с признаками заявленного способа, поэтому указанный способ принят за прототип.
Способ определения коэффициента сцепления в прототипе реализован следующим образом.
С началом движения датчиками крутящего момента одновременно измеряют момент силы Mg торможения электромагнитного тормоза и момент силы M сцепления измерительного колеса. Измеренные значения момента силы Mg торможения электромагнитного тормоза и момента силы M сцепления измерительного колеса сравнивают.
В случае когда момент силы M сцепления больше момента силы Mg торможения (M>Mg), тогда увеличивают ток возбуждения обмотки электромагнитного тормоза. При этом увеличивается момент силы Mg торможения электромагнитного тормоза, действующий на измерительное колесо.
В случае когда момент силы M сцепления меньше момента силы Mg торможения (M<Mg), тогда уменьшают ток возбуждения обмотки электромагнитного тормоза. При этом уменьшается момент силы Mg торможения электромагнитного тормоза, действующий на измерительное колесо.
Увеличение или уменьшение момента силы Mg торможения продолжают до момента, когда момент силы Mg торможения электромагнитного тормоза не станет равным моменту силы M сцепления измерительного колеса с поверхностью покрытия. В дальнейшем, сравнивая показания датчиков крутящего момента, осуществляют слежение за равенством момента силы M сцепления измерительного колеса с моментом силы Mg торможения электромагнитного тормоза. При их равенстве тормозное усилие между измерительным колесом и поверхностью покрытия приобретает максимальное значение Ртор.макс. При этом максимальное тормозное усилие Ртор.макс равно силе сцепления F измерительного колеса с поверхностью покрытия (Ртор.макс=F).
При равенстве момента силы M сцепления измерительного колеса моменту силы Mg торможения электромагнитного тормоза (M=Mg) вычисляют коэффициент сцепления Ксцп:
Ксцп=M/PR; (F=M/R; Ксцп=F/P),
где Ксцп - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
M - момент силы сцепления измерительного колеса с поверхностью покрытия, H·м;
P - нормальная сила нагрузки измерительного колеса на поверхность покрытия, H;
R - радиус измерительного колеса, м;
F - сила сцепления измерительного колеса с поверхность покрытия, H.
Недостаток способа-прототипа заключается в следующем. Силу сцепления измерительного колеса с поверхностью покрытия определяют по информации двух датчиков крутящего момента при равенстве их значений (M=Mg). При этом каждый датчик имеет погрешность в определении крутящего момента, использование информации только одного датчика при вычислении повышает точность определения коэффициента сцепления.
Целью предлагаемого способа является повышение точности определения коэффициента сцепления колеса с поверхностью искусственного покрытия путем исключения из работы датчика крутящего момента, определяющего момент силы Mg торможения. Коэффициент сцепления колеса с поверхностью покрытия вычисляют по информации датчика крутящего момента, определяющего момент силы M сцепления измерительного колеса с поверхностью покрытия. Информацию момента силы M сцепления используют для вычисления коэффициента сцепления и для регулировки момента силы Mg торможения, при этом получают и поддерживают максимальное тормозное усилие Ртор.макс измерительного колеса с поверхностью покрытия.
Решение поставленной цели в заявленном "Способе определения коэффициента сцепления колеса с поверхностью искусственного покрытия" достигается тем, что в нем, как в прототипе, коэффициент сцепления определяют методом торможения, когда по поверхности искусственного покрытия катят измерительное колесо, которое тормозят в соответствии с состоянием поверхности покрытия. При этом определяют нормальную силу P нагрузки измерительного колеса на поверхность покрытия и момент силы M сцепления измерительного колеса с поверхностью покрытия. В заявленном способе дополнительно в соответствии с полученным значением момента силы M сцепления измерительного колеса увеличивают или уменьшают момент силы Mg торможения электромагнитного тормоза. При этом получают, а затем постоянно поддерживают максимальное тормозное усилие (Ртор.макс) измерительного колеса с поверхностью искусственного покрытия, которое равно силе сцепления F измерительного колеса с поверхностью покрытия (Ртор.макс=F), Коэффициент сцепления Ксцп вычисляют по формуле
Ксцп=M/PR,
где Ксцп - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
M - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
P - нормальная нагрузка измерительного колеса на поверхность покрытия, H;
R - радиус измерительного колеса, м.
В известных технических решениях признаков, сходных с отличительными признаками заявленного способа, не обнаружено, вследствие чего можно считать, что заявленный способ соответствует изобретательскому уровню. Использование данного способа при его реализации позволит повысить безопасность при взлете и посадке летательных аппаратов путем повышения точности определения коэффициента сцепления авиашасси самолета с поверхностью взлетно-посадочной полосы аэродрома, а также точнее определять состояние автотрасс.
Сущность предлагаемого способа определения коэффициента сцепления колеса с поверхность покрытия поясняется чертежами, где представлены:
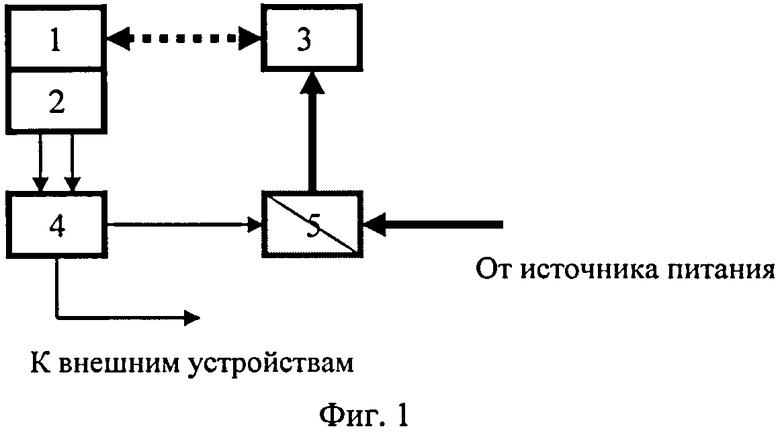
на фиг.1 - структурная схема устройства, реализующего предложенный способ определения коэффициента сцепления колеса с поверхностью покрытия;
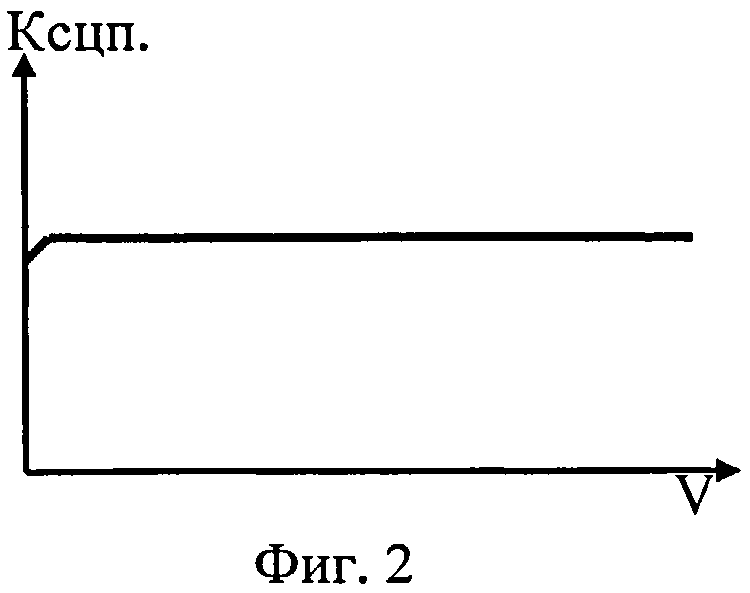
на фиг.2 - отображена реализация предложенного способа определения коэффициента сцепления при изменении скорости V движения устройства измерения;
на фиг.3 - алгоритм реализации предложенного способа определения коэффициента сцепления.
В предлагаемом способе определение коэффициента сцепления колеса с поверхностью искусственного покрытия достигается тем, что в нем, как в прототипе, коэффициент сцепления определяют методом торможения, когда по поверхности искусственного покрытия катят измерительное колесо, которое тормозят в соответствии с состоянием поверхности покрытия. При этом определяют нормальную силу P нагрузки измерительного колеса на поверхность покрытия и момент силы M сцепления измерительного колеса с поверхностью покрытия. В заявленном способе дополнительно в соответствии с полученным значением момента силы M сцепления измерительного колеса увеличивают или уменьшают момент силы Mg торможения электромагнитного тормоза. При этом получают, а затем постоянно поддерживают максимальное тормозное усилие Ртор.макс измерительного колеса с поверхностью искусственного покрытия, которое равно силе сцепления F измерительного колеса с поверхностью покрытия (Ртор.макс=F). Коэффициент сцепления Ксцп вычисляют по формуле
Ксцп=M/PR,
где Ксцп - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
M - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
P - нормальная нагрузка измерительного колеса на поверхность покрытия, H;
R - радиус измерительного колеса, м.
Для реализации предложенного способа используется устройство, структурная схема которого приведена на фиг.1.
Конструктивное исполнение реализации предложенного способа определения коэффициента сцепления
Устройство содержит: измерительное колесо 1, датчик крутящего момента 2, электромагнитный тормоз 3, микроконтроллер 4, блок управления 5. Сигналы датчика крутящего момента 2: момент силы M сцепления и скорость вращения измерительного колеса, с первого и второго выходов соответственно поступают на входы микроконтроллера 4. Сигнал управления с выхода микроконтроллера 4 поступает на первый вход блока управления 5. Второй выход микроконтроллера 4 подключают к внешним устройствам для дальнейшей обработки и накопления информации о состоянии поверхности покрытия. Источник питания через блок управления 5 подключают к электромагнитному тормозу. Измерительное колесо вращающимся валом подключают к ротору электромагнитного тормоза. При определении коэффициента сцепления взлетно-посадочной полосы аэродрома в качестве измерительного колеса используют авиационное шасси. При оценке состояния поверхности дорожного покрытия - автомобильное шасси. Вес конструкции измерительного устройства составляет нормальную нагрузку измерительного колеса на поверхность покрытия.
В диск измерительного колеса вмонтирован датчик крутящего момента 2. Датчик крутящего момента 2 измеряет момент силы M сцепления измерительного колеса 1 с поверхностью покрытия. Датчик крутящего момента 2 снабжен: тензорезисторными преобразователями измерения крутящего момента, датчиком частоты вращения и системой передачи информации. Полученная информация о крутящем моменте измерительного колеса 1 и его частоте вращения поступает на входы микроконтроллера 4.
Электромагнитный тормоз 3 - электромагнитный порошковый тормоз. Электромагнитный тормоз 3 имеет два соосных элемента: корпус с обмоткой электромагнита и ротор. Корпус от ротора отделен кольцевым зазором, который заполнен сухим легированным ферромагнитным порошком. Крутящий тормозной момент Mg передается легированным ферромагнитным порошком, вязкость которого меняется с изменением тока в обмотке возбуждения электромагнитного тормоза. Крутящий момент силы Mg торможения электромагнитного тормоза 3 прямо пропорционален току обмотки возбуждения электромагнитного тормоза. Скорость вращения ротора электромагнитного тормоза 3 не влияет на момент силы Mg торможения.
Микроконтроллер 4 - микросхема, которая выпускается с программируемой памятью программ, оперативным запоминающим устройством, аналого-цифровыми преобразователями, 16-разрядным таймером, интерфейсами, таймером реального времени, входами и выходами для ввода и вывода информации.
Блок управления 5 - типовой блок, преобразующий сигналы управления в соответствующий им ток возбуждения обмотки электромагнита электромагнитного тормоза 3.
Реализация заявленного способа
Реализация заявленного способа определения коэффициента сцепления колеса с поверхностью искусственного покрытия осуществляют в соответствии с алгоритмом, приведенным на фиг.3. С началом движения пробуксовка измерительного колеса 1 отсутствует и сила сцепления F измерительного колеса 1 больше силы подтормаживания электромагнитного тормоза 3. С датчика крутящего момента 2 снимается сигнал момента силы M сцепления, который в микроконтроллере 4 преобразуется в управляющий сигнал. Управляющий сигнал поступает в блок управления 5, под действием которого увеличивается ток, питающий обмотку возбуждения электромагнитного тормоза 3. Увеличивается момент силы Mg торможения электромагнитного тормоза 3, увеличивается тормозное воздействие на измерительное колесо 1. Если при этом момент силы M сцепления останется больше момента силы Mg торможения, процесс повторяется до момента, пока момент силы M сцепления измерительного колеса 1 не станет равным моменту силы Mg торможения электромагнитного тормоза 3. В дальнейшем управляющий сигнал поддерживает равенство момента силы M сцепления с моментом силы Mg торможения. Если в процессе измерений состояние поверхности изменится: сцепление измерительного колеса 1 уменьшится или увеличится, то соответственно уменьшится или увеличится управляющий сигнал, задаваемый датчиком крутящего момента 2. Следовательно, в процессе измерений осуществляют автоматическое слежение за равенством момента силы M сцепления измерительного колеса 1 с моментом силы Mg торможения электромагнитного тормоза (M=Mg). При равенстве момента силы M сцепления моменту силы Mg торможения тормозное усилие между измерительным колесом и поверхностью покрытия приобретает максимальное значение Ртор.макс. При этом максимальное тормозное усилие Ртор.макс равно силе сцепления F измерительного колеса с поверхностью покрытия (Ртор.макс=F). Коэффициент сцепления Ксцп вычисляют по формуле
Ксцп=M/PR,
где Ксцп - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
M - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
P - нормальная нагрузка измерительного колеса на поверхность покрытия, H;
R - радиус измерительного колеса, м.
Скорость вращения ротора электромагнитного тормоза 3 не влияет на момент силы Mg торможения. Поэтому в заявленном способе измерение коэффициента сцепления осуществляют при любой скорости V движения устройства измерения (фиг.2). При необходимости возможны остановки, при этом измеренное значение коэффициента сцепления сохраняется. С возобновлением движения, измерения осуществляют с учетом ранее измеренного значения.
С выхода датчика крутящего момента 2 в микроконтроллер 4 поступает информация о частоте вращения измерительного колеса 1, по скорости вращения которого определяют: скорость движения устройства измерения, измеренную поверхность покрытия и период обновления информации о состоянии поверхности покрытия.
Положительный эффект от реализации заявленного способа заключается в повышении точности определения коэффициента сцепления. В заявленном способе исключают один из датчиков крутящего момента, при этом исключаются из расчетов ошибки второго датчика, а также ошибки при сравнении крутящих моментов M и Mg. Датчик крутящего момента 2 измеряет момент силы M сцепления измерительного колеса 1 с поверхностью покрытия. Сигнал управления, соответствующий моменту силы M сцепления измерительного колеса 1, осуществляет управление электромагнитным тормозом. В результате сигналы датчика крутящего момента 2 отслеживают равенство момента силы Mg торможения электромагнитного тормоза 3 моменту силы M сцепления измерительного колеса 1 с поверхностью покрытия. При равенстве (M=Mg) между измерительным колесом 1 и поверхностью покрытия реализуется максимальное тормозное усилие Ртор.макс, которое равно силе сцепления F измерительного колеса 1 с поверхностью покрытия (Ртор.макс=F).
Конструктивно устройство, реализующее предложенный способ определения коэффициента сцепления, может быть изготовлено из следующих деталей:
- измерительное колесо 1 - авиационное или автомобильное шасси;
- датчик крутящего момента 2 - датчик крутящего момента, WHT-S-S японского производства;
- электромагнитный тормоз 3 - электромагнитный порошковый тормоз, ELB 1700;
- микроконтроллер 4 - микросхема, dsPIC30 или dsPIC33 производства США;
- блок управления - типовой силовой блок, преобразующий сигналы управления в ток возбуждения обмотки электромагнита электромагнитного тормоза 3.
Изобретение относится к способам для определения коэффициента сцепления на искусственных поверхностях, преимущественно взлетно-посадочных полос аэродромов, а также дорожных покрытий. Способ осуществляют методом торможения, когда по поверхности искусственного покрытия катят измерительное колесо, которое тормозят в соответствии с состоянием поверхности покрытия. При этом определяют нормальную силу P нагрузки измерительного колеса на поверхность покрытия. Определяют момент силы M сцепления измерительного колеса с поверхностью покрытия, и в соответствии с полученным значением момента силы M сцепления измерительного колеса увеличивают или уменьшают момент силы Mg торможения электромагнитного тормоза или другого устройства торможения. При этом получают и поддерживают максимальное тормозное усилие Ртор.макс измерительного колеса с поверхностью искусственного покрытия, которое равно силе сцепления F измерительного колеса с поверхность покрытия (Ртор.макс=F). Коэффициент сцепления Ксцп вычисляют по формуле Ксцп=M/PR, R - радиус измерительного колеса. Технический результат - повышение точности измерений коэффициента сцепления. 3 ил.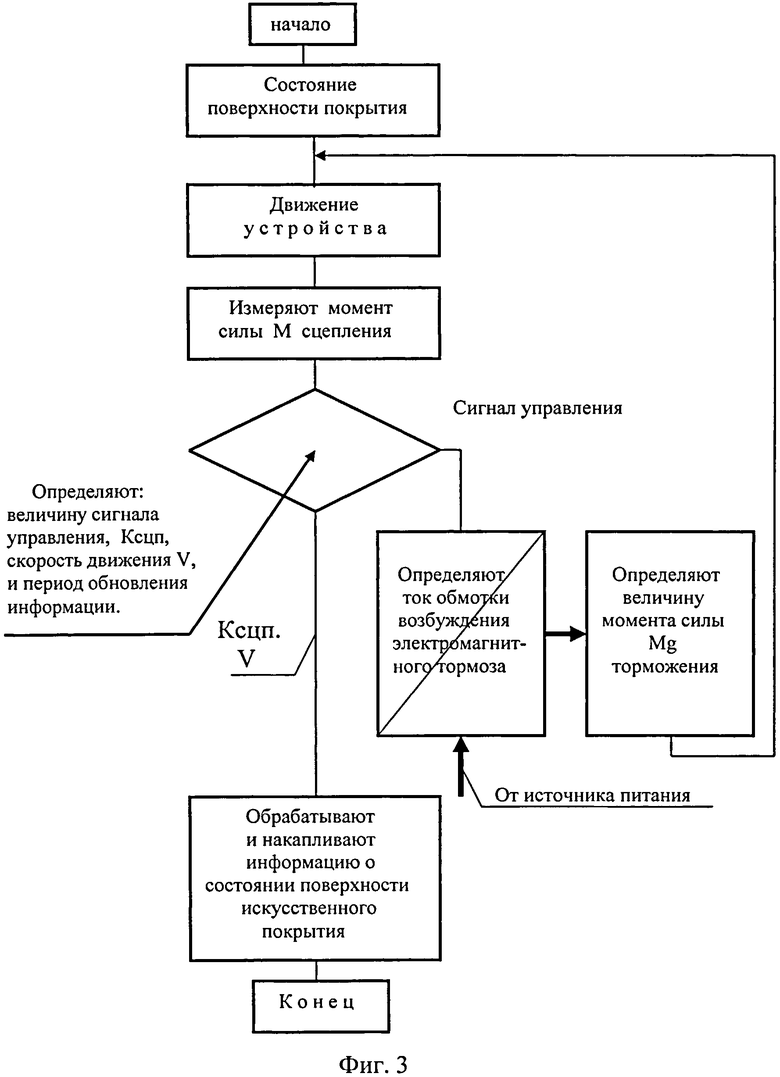
Способ определения коэффициента сцепления колеса с поверхностью искусственного покрытия осуществляют методом торможения, когда по поверхности искусственного покрытия катят измерительное колесо, которое тормозят в соответствии с состоянием поверхности покрытия, при этом определяют нормальную силу Р нагрузки измерительного колеса на поверхность покрытия и момент силы М сцепления измерительного колеса с поверхностью покрытия, отличающийся тем, что дополнительно в соответствии с полученным значением момента силы М сцепления измерительного колеса увеличивают или уменьшают момент силы Mg торможения электромагнитного тормоза, при этом получают и поддерживают максимальное тормозное усилие Р тор.макс измерительного колеса с поверхностью искусственного покрытия, которое равно силе сцепления F измерительного колеса с поверхностью покрытия (Ртор.макс=F), и коэффициент сцепления Ксцп вычисляют по формуле
Ксцп=М/PR,
где Ксцп - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
М - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н;
R - радиус измерительного колеса, м.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ ИСКУССТВЕННОГО ПОКРЫТИЯ | 2010 |
|
RU2442136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ | 2009 |
|
RU2393460C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2390003C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ | 2006 |
|
RU2308705C1 |
| EP 0227003 A2, 01.07.1987 | |||

