Изобретение относится к способам измерения и используется для оценки состояния поверхности взлетно-посадочной полосы аэродрома, но также может использоваться для определения коэффициента сцепления дорожных покрытий.
Известен способ оценки состояния взлетно-посадочной полосы с использованием транспортных средств. Эффективность торможения определяют обработкой результатов измерения расстояния или времени торможения до остановки грузового или легкового автомобиля, двигающегося с заданной скоростью, при торможении, обеспечивающем полный юз колес. По результатам измерений вычисляют коэффициент сцепления.
Недостатком этого способа является то, что из-за большого количества исходных параметров математической модели процесса торможения, каждый из которых измеряют с различной точностью, суммарная погрешность определения коэффициента сцепления достигает значительной величины (Руководство по эксплуатации гражданских аэродромов Российской Федерации, приложение 6).
Близким по технической сущности к предлагаемому способу является "Способ" определения коэффициента сцепления колес транспортного средства с дорожным покрытием при торможении в режиме автоблокировки." Патент РФ №2006397.)
Известный способ реализуют следующим образом. Измерительное колесо вводят в контакт с поверхностью дорожного покрытия. Нагружают нормальной силой. Катят по поверхности дорожного покрытия с заданной степенью проскальзывания, которую создают путем присоединения к колесу генератора постоянного тока независимого возбуждения, который можно вводить в тормозной или двигательный режимы, путем изменения тока якоря генератора. Сигналы электронных датчиков нормальной нагрузки и горизонтальной нагрузки (тормозной силы измерительного колеса) поступают в электрический прибор - логометр. Логометр используется для регистрации отношения сигналов указанных датчиков.
Отношение тормозного усилия на измерительном колесе к нормальной силе давления измерительного колеса на дорожное покрытие равно коэффициенту сцепления колеса транспортного средства с поверхностью дорожного покрытия. Недостатком известного способа является то, что измерения осуществляются при заданной степени проскальзывания измерительного колеса, что уменьшает максимальное тормозное усилие между измерительным колесом и поверхностью покрытия, соответственно ухудшая точность определения коэффициента сцепления.
Наиболее близким к заявленному способу по технической сущности является "Способ определения коэффициента сцепления колеса с аэродромным покрытием". Патент Российской Федерации №2298166, G01N 19/02. Известный способ определения коэффициента сцепления имеет наибольшее количество сходных существенных признаков с признаками заявленного способа, поэтому указанный способ принят за прототип. Способ определения коэффициента сцепления в прототипе реализован следующим образом.
Процесс определения коэффициента сцепления условно делится на два этапа: поиска и слежения.
В режиме поиска определяют начало пробуксовки измерительного колеса, когда ток активной нагрузки равномерно увеличивают, при этом сила динамического торможения измерительного колеса будет также пропорционально расти. Пробуксовку измерительного колеса определяют по скорости вращения датчиков угловых скоростей, установленных на измерительном и ведомом колесах. С появлением пробуксовки измерительного колеса появляется разность в показаниях датчиков угловых скоростей. При фиксации начала пробуксовки режим поиска заканчивается.
В режиме слежения обеспечивают постоянное отслеживание начала пробуксовки измерительного колеса, при этом информация датчиков угловых скоростей поступает в вычислитель, где их показания сравниваются.
Пробуксовка измерительного колеса отсутствует - показания датчиков угловых скоростей равны. В вычислителе формируется сигнал увеличения нагрузки на генератор. С увеличением нагрузки на генераторе увеличивается сила динамического торможения измерительного колеса, с появлением пробуксовки которого увеличение нагрузки на генераторе прекращается.
Если пробуксовка измерительного колеса больше заданной величины, тогда уменьшают нагрузку на генератор, соответственно уменьшается сила динамического торможения измерительного колеса, уменьшается его пробуксовка. При достижении заданной величины пробуксовки нагрузка на генераторе сохраняется.
В соответствии с программным обеспечением вычислителем обеспечивают заданный минимальный диапазон пробуксовки измерительного колеса, в пределах которого определяют силу сцепления измерительного колеса с поверхностью аэродромного покрытия. Коэффициент сцепления определяют как отношение силы сцепления измерительного колеса к нормальной силе давления измерительного колеса на поверхность покрытия.
Ксцп.=Рсцп./Р,
где Ксцп. - коэффициент сцепления;
Рсцп. - сила сцепления измерительного колеса с поверхностью покрытия, Н;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н.
Для вычисления максимального значения коэффициента сцепления вычисленное значение коэффициента сцепления умножают на коэффициент пробуксовки k, который определяют при тарировании устройства.
Ксцп.макс.=Ксцп.k,
где Ксцп.макс. - максимальное значение коэффициента сцепления с поверхностью покрытия;
k - коэффициент динамического торможения, который определяют при тарировании устройства.
Недостаток способа-прототипа заключается в следующем. Сила сцепления Рсцп. измерительного колеса с поверхностью покрытия определяют по информации датчиков угловой скорости в момент начала его пробуксовки. Наличие пробуксовки измерительного колеса понижает точность определения коэффициента сцепления.
Целью предлагаемого способа является повышение точности измерения коэффициента сцепления колеса с поверхностью покрытия путем регистрации максимального тормозного усилия Ртор.макс. между измерительным колесом и поверхностью покрытия, по которому рассчитывают коэффициент сцепления колеса с поверхностью искусственного покрытия, при этом отсутствует пробуксовка измерительного колеса.
Решение поставленной цели в " Способе определения коэффициента сцепления колеса с поверхностью искусственного покрытия " достигается тем, что в нем, как в прототипе, коэффициент сцепления колеса с поверхностью искусственного покрытия определяют методом торможения, когда по поверхности искусственного покрытия катят измерительное колесо, которое тормозят в соответствии с состоянием поверхности покрытия, при этом определяют нормальную силу Р нагрузки измерительного колеса на поверхность покрытия.
В заявленном способе независимо от скорости движения дополнительно определяют момент силы торможения (М), создаваемый электромагнитным тормозом, и момент силы сцепления (Mg) измерительного колеса с поверхностью покрытия. Затем постоянно поддерживают равенство момента силы торможения (М) и момента силы сцепления (Mg) (М=Mg.). При этом между измерительньм колесом и поверхностью искусственного покрытия получают максимальное тормозное усилие Ртор.макс., которое равно силе сцепления Рсцп. измерительного колеса с поверхностью покрытия.
(Ртор.макс.=Рсцп., Рсцп.=РКсцп.). Коэффициент сцепления рассчитывают по формуле:
Kсцп.=Mg/P·R,
где Ксцп. - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
М - момент силы торможения, создаваемый электромагнитным тормозом или другим устройством торможения, Н·м;
Mg - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н;
Рсцп. - сила сцепления измерительного колеса с поверхностью покрытия, Н;
Ртор.макс. - максимальное тормозное усилие между измерительным колесом и поверхностью покрытия, Н;
R - радиус измерительного колеса, м.
В известных технических решениях признаков, сходных с отличительными признаками заявленного способа, не обнаружено, вследствие чего можно считать, что предлагаемый способ соответствует изобретательскому уровню.
Использование данного способа при его реализации позволит повысить безопасность при посадке летательных аппаратов путем повышения точности определения коэффициента сцепления авиашасси с поверхностью взлетно-посадочной полосы аэродрома, а также точнее определять состояние автотрасс.
Сущность предлагаемого способа определения коэффициента сцепления колеса с поверхностью искусственного покрытия поясняется чертежами, где представлены:
на фиг.1 - структурная схема устройства, реализующая предложенный способ определения коэффициента сцепления;
на фиг.2 поясняется реализация предложенного способа определения коэффициента сцепления колеса с поверхностью покрытия;
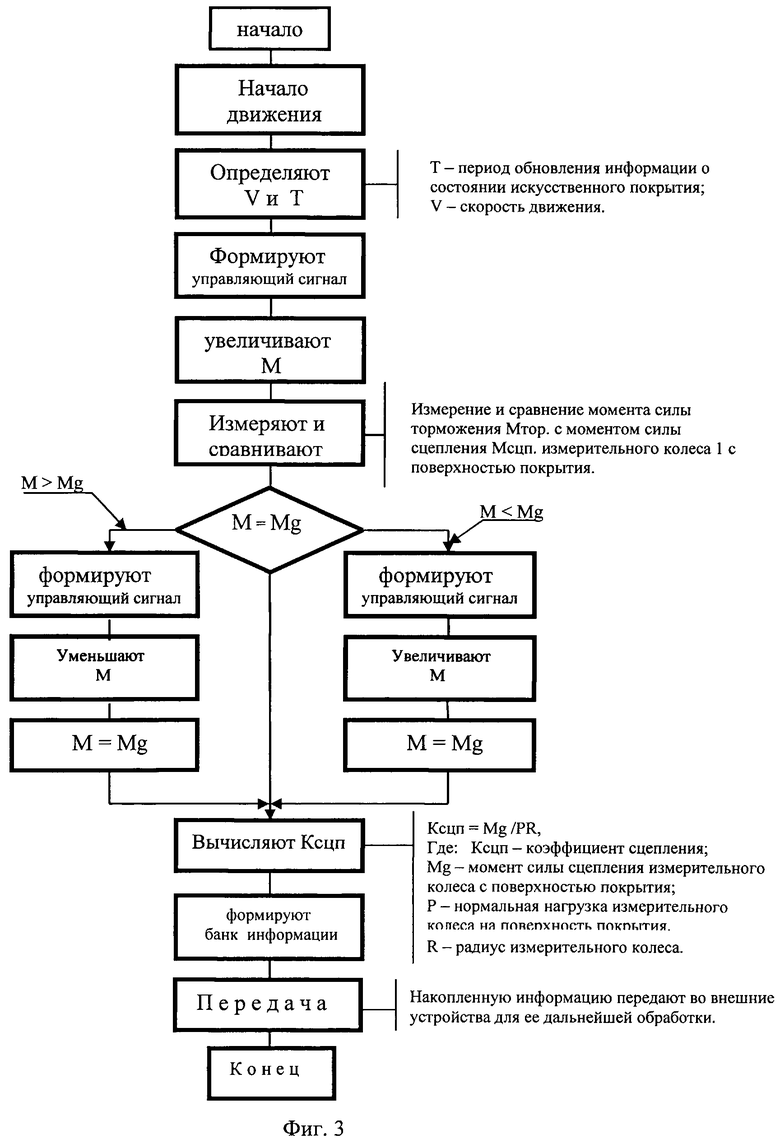
на фиг.3 - алгоритм реализации предложенного способа определения коэффициента сцепления.
В предлагаемом способе определения коэффициента сцепления колеса с поверхностью искусственного покрытия, как и в прототипе, коэффициент сцепления колеса с поверхностью искусственного покрытия определяют методом торможения, когда по поверхности искусственного покрытия катят измерительное колесо, которое тормозят в соответствии с состоянием поверхности покрытия, при этом определяют нормальную силу Р нагрузки измерительного колеса на поверхность покрытия.
В заявленном способе независимо от скорости движения дополнительно определяют момент силы торможения (М), создаваемый электромагнитным тормозом, и момент силы сцепления (Mg) измерительного колеса с поверхностью покрытия. Затем постоянно поддерживают равенство момента силы торможения (М) и момента силы сцепления Mg (М=Mg). При этом между измерительным колесом и поверхностью искусственного покрытия получают максимальное тормозное усилие Ртор.макс., которое равно силе сцепления Рсцп. измерительного колеса с поверхностью покрытия (Ртор.макс.=Рсцп., Рсцп.=РКсцп.). Коэффициент сцепления рассчитывают по формуле:
Kсцп.=Mg/PR,
где Ксцп. - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
М - момент силы торможения, создаваемый электромагнитным тормозом или другим устройством торможения, Н·м;
Mg - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н;
Рсцп. - сила сцепления измерительного колеса с поверхностью покрытия, Н;
Ртор.макс. - максимальное тормозное усилие между измерительным колесом и поверхностью покрытия, Н;
R - радиус измерительного колеса, м.
Для реализации предложенного способа используется устройство, структурная схема которого приведена на фиг.1. Устройство содержит: измерительное колесо 1, первый 2 и второй 3 датчики крутящего момента, электромагнитный тормоз 4, микроконтроллер 5, силовой каскад 6.
Измерительное колесо 1 вращающимся валом через первый датчик 2 крутящего момента соединяют с ротором электромагнитного тормоза 4. Выход первого датчика 2 крутящего момента соединяют с первым входом микроконтроллера 5.
Измерительное колесо 1 механически соединяют с вторым датчиком 3 крутящего момента, выход которого подключают к второму входу микроконтроллера 5. Выход микроконтроллера 5 соединяют с первым входом силового каскада 6. Источник питания через второй вход силового каскада 6 подключают к обмотке электромагнита электромагнитного тормоза 4. Свободный выход микроконтроллера 5 подключают к внешним устройствам.
Вес конструкции измерительного устройства и элементов измерения составляют нормальную силу Р нагрузки измерительного колеса на поверхность покрытия.
При определении коэффициента сцепления поверхности аэродромного покрытия в качестве измерительного колеса 1 используется авиационное шасси. При оценке состояния дорожного покрытия используется автомобильное шасси.
Первый датчик 2 крутящего момента измеряет момент силы торможения (М) измерительного колеса 1.
Крутящий момент, приложенный между концами вала датчика 2 крутящего момента (между измерительным колесом 1 и электромагнитным тормозом 4), создает механическую деформацию, которая измеряется тензометрической системой датчика. Первый датчик 2 крутящего момента содержит измерительный вал с прецизионными тензорезисторами и систему передачи информации.
Выходной сигнал, пропорциональный прикладываемому крутящему моменту, поступает на первый вход микроконтроллера 5.
Второй датчик 3 крутящего момента размещают на диске измерительного колеса 1.
Второй датчик 3 крутящего момента измеряет момент силы сцепления (Mg) измерительного колеса 1 с поверхностью искусственного покрытия. Датчик 3 снабжен тензорезисторными преобразователями измерения крутящего момента, датчиком частоты вращения и системой передачи информации. Полученная информация о крутящем моменте измерительного колеса и его частоте вращения поступает на второй вход микроконтроллера 5.
Электромагнитный тормоз 4 - магнитно-порошковый тормоз. Электромагнитный тормоз 4 имеет два соосных элемента: корпус, содержащий обмотку электромагнита, и ротор. Корпус от ротора отделен кольцевым зазором, который заполнен сухим легированным ферромагнитным порошком. Крутящий тормозной момент (М) передается легированным ферромагнитным порошком, вязкость которого меняется изменением тока в обмотке электромагнита электромагнитного тормоза 4.
Крутящий момент торможения (М), передаваемый электромагнитным тормозом 4, прямо пропорционален току обмотки электромагнита электромагнитного тормоза. Скорость вращения ротора электромагнитного тормоза 4 не влияет на крутящий момент торможения (М).
Микроконтроллер 5 выполнен на микросхеме, которая выпускается с программируемой памятью программ, оперативным запоминающим устройством, 10-разрядными аналого-цифровыми преобразователями, 16-разрядным таймером, встроенными интерфейсами, таймером реального времени и входами и выходами для ввода и вывода информации.
Реализация заявленного способа определения коэффициента сцепления колеса с поверхностью искусственного покрытия осуществляется в соответствии с программным обеспечением микроконтроллера 5. Его алгоритм работы приведен на фиг.3. Коэффициент сцепления определяют при любой скорости движения устройства измерения. При необходимости возможны остановки, при этом измеренное значение коэффициента сцепления сохраняется. С возобновлением движения измерения осуществляются с учетом ранее измеренного значения. Осуществляется непрерывность измерений коэффициента сцепления независимо от скорости движения и возможных остановок устройства измерения. По скорости вращения измерительного колеса 1 определяется период (Т) - периодичность обновления измерений информации. Частота обновления информации осуществляется также в соответствии с состоянием поверхности покрытия и назначения устройства определения коэффициента сцепления. По скорости вращения измерительного колеса 1 вычисляется скорость движения устройства измерения.
С началом движения (фиг.3) в каждом периоде (Т) измерения ток катушки возбуждения электромагнитного тормоза 4 увеличивается, в соответствии с управляющими сигналами микроконтроллера 5. С увеличением тока возбуждения пропорционально увеличивается момент силы (М) торможения электромагнитного тормоза 4. Момент силы (М) торможения оказывает тормозное воздействие на измерительное колесо 1.
Крутящий момент силы (М) торможения, действующий на измерительное колесо 1, измеряется первым датчиком 2 крутящего момента. Измеренный момент силы (М) торможения поступает в микроконтроллер 5. Одновременно вторым датчиком 3 крутящего момента измеряется момент силы (Mg) сцепления измерительного колеса 1 с поверхностью искусственного покрытия. Момент силы (Mg) сцепления поступает в микроконтроллер 5. В микроконтроллере 5 значение момент силы (Mg) сцепления измерительного колеса 1 сравнивается с моментом силы (М) торможения электромагнитного тормоза 4. При сравнении информации датчиков крутящего момента формируют управляющие сигналы, которые поступают в силовой каскад 6.
В случае, когда момент силы (Mg) сцепления оказывается больше момента силы (М) торможения (Mg>M), тогда микроконтроллером 5 формируется управляющий сигнал увеличения тока возбуждения электромагнита, который поступает в силовой каскад 6. Силовым каскадом 6, в данном случае, увеличивается ток возбуждения электромагнита электромагнитного тормоза 4. При этом увеличивается момент силы (М) торможения измерительного колеса 1.
В случае, если момент силы (Mg) сцепления оказывается меньше момента силы (М) торможения (Mg<M), тогда микроконтроллером 5 формируется управляющий сигнал уменьшения тока возбуждения электромагнита, который поступает в силовой каскад 6. Силовым каскадом 6 в данном случае уменьшается ток возбуждения электромагнита электромагнитного тормоза 4. При этом уменьшается момент силы (М) торможения измерительного колеса 1.
Увеличение или уменьшение момента силы торможения (М) продолжается до момента, когда момент силы торможения (М) станет равен моменту силы сцепления (Mg) измерительного колеса 1 с поверхностью покрытия. В дальнейшем, сравнивая показания первого 2 и второго 3 датчиков крутящего момента, осуществляют слежение за равенством момента силы торможения (М) электромагнитного тормоза 4 моменту силы сцепления (Mg) измерительного колеса 1. При равенстве момента силы торможения (М) электромагнитного тормоза 4 моменту силы сцепления (Mg) измерительного колеса 1 с поверхностью покрытия тормозное усилие между измерительным колесом 1 и поверхностью покрытия приобретает максимальное значение Ртор.макс. При этом максимальное тормозное усилие Ртор.макс. равно силе сцепления Рсцп. измерительного колеса 1 с поверхностью покрытия (Ртор.макс.=Рсцп.).
При равенстве момента силы торможения (М) электромагнитного тормоза 4 моменту силы сцепления (Mg) измерительного колеса 1 (М=Mg) вычисляют коэффициент сцепления Ксцп. (фиг.2)
Ксцп.=Mg/P·R (Рсцп.=Mg/R; Ксцп.=Рсцп./Р),
где Ксцп. - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
М - момент силы торможения, создаваемый электромагнитным тормозом или другим устройством торможения, Нм;
Mg - момент силы сцепления измерительного колеса с поверхностью покрытия, Нм;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н;
Рсцп. - сила сцепления измерительного колеса с поверхностью покрытия, Н;
Pgмакс. - максимальное тормозное усилие между измерительным колесом и поверхностью покрытия, Н;
R - радиус измерительного колеса, м.
В микроконтроллере 5, в его оперативной памяти, формируется банк данных, в который записывается время, скорость движения и данные о состоянии поверхности покрытия. При соответствующем объеме информации информация передается внешним устройствам для ее дальнейшей обработки.
При определении коэффициента сцепления заявленным способом требования ИКАО (международной организации гражданской авиации) не нарушаются.
Положительный эффект от реализации предложенного способа определения коэффициента сцепления заключается в том, что коэффициент сцепления вычисляют в момент равенства момента силы торможения (М) электромагнитного тормоза 4 моменту силы сцепления (Mg) измерительного колеса 1 с поверхностью покрытия, когда тормозное усилие между измерительным колесом 1 и поверхностью покрытия приобретает максимальное значение Ртор.макс. При этом максимальное тормозное усилие Ртор.макс. равно силе сцепления Рсцп. измерительного колеса 1 с поверхностью покрытия (Ртор.макс.=Рсцп.). Вычисление коэффициента сцепления при максимальном тормозном усилии Ртор. макс.повышает его точность. При этом пробуксовка измерительного колеса 1 отсутствует, что повышает точность определения коэффициента сцепления и увеличивает срок службы шасси измерительного колеса.
Реализация заявленного способа позволяет осуществлять определение коэффициента сцепления при любой скорости движения, что дает возможность измерять коэффициент сцепления на взлетно-посадочной полосе аэродрома, на самолетной стоянке, рулежке, в ангарах, на действующих автотрассах в любое время суток (соблюдая все правила дорожного движения), при ремонте или вводе в эксплуатацию новых автотрасс, при любых разворотах и малой протяженности поверхности покрытия.
Заявленный способ определения коэффициента сцепления может быть выполнен на следующих элементах:
- измерительное колесо 1 - автомобильное или авиационное шасси;
- первый датчик 2 крутящего момента - бесконтактный датчик крутящего момента, модель 8651;
- торой датчик 3 крутящего момента - датчик крутящего момента М28; или датчики крутящего момента, вмонтированные в диск измерительного колеса, тип LTW-NA, LTW-ND - Японского производства;
- электромагнитный тормоз 4 - магнитно-порошковый тормоз с пустотелым валом, тип FAT, FRAT, фирма Mobac GmbH, Германия;
- микроконтроллер 5 - микроконтроллер семейства PIC 18, авторы Б.Я.Прохоренко и др. изд. М.ДОДЭКА, 1999 г.
- силовой каскад 6 - типовой силовой блок, преобразующий сигналы управления в ток возбуждения обмотки электромагнита электромагнитного тормоза 4.

Изобретение относится к способам для определения коэффициента сцепления на искусственных покрытиях. Способ определения коэффициента сцепления колеса с поверхностью искусственного покрытия осуществляют методом торможения, когда по поверхности искусственного покрытия катят измерительное колесо, которое тормозят в соответствии с состоянием поверхности покрытия, при этом определяют нормальную силу Р нагрузки измерительного колеса на поверхность покрытия. Определяют момент силы торможения (М), создаваемый электромагнитным тормозом, и момент силы сцепления (Mg) измерительного колеса с поверхностью покрытия, а затем постоянно поддерживают равенство момента силы торможения (М) и момента силы сцепления (Mg) (M=Mg), при этом между измерительным колесом и поверхностью искусственного покрытия получают максимальное тормозное усилие Ртор.макс., которое равно силе сцепления Рсцп. измерительного колеса с поверхностью покрытия; коэффициент сцепления рассчитывают по формуле: Kсцп.=Mg/P·R, R - радиус измерительного колеса, м. Технический результат - повышение точности измерений. 3 ил.
Способ определения коэффициента сцепления колеса с поверхностью искусственного покрытия осуществляют методом торможения, когда по поверхности искусственного покрытия катят измерительное колесо, которое тормозят в соответствии с состоянием поверхности покрытия, при этом определяют нормальную силу Р нагрузки измерительного колеса на поверхность покрытия, отличающийся тем, что дополнительно определяют момент силы торможения (М), создаваемый электромагнитным тормозом или другим устройством торможения, и момент силы сцепления (Mg) измерительного колеса с поверхностью покрытия, а затем постоянно поддерживают равенство момента силы торможения (М) и момента силы сцепления (Mg) (M=Mg), при этом между измерительным колесом и поверхностью искусственного покрытия получают максимальное тормозное усилие Ртор.макс, которое равно силе сцепления Рсцп измерительного колеса с поверхностью покрытия (Ртор.макс=Рсцп, Рсцп=РКсцп); коэффициент сцепления рассчитывают по формуле:
Ксцп = Mg/PR,
где Ксцп - коэффициент сцепления измерительного колеса с поверхностью искусственного покрытия;
М - момент силы торможения, создаваемый электромагнитным тормозом или другим устройством торможения, Н·м;
Mg - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н;
Рсцп - сила сцепления измерительного колеса с поверхностью покрытия, Н;
Ртор.макс - максимальное тормозное усилие между измерительным колесом и поверхностью покрытия, Н;
R - радиус измерительного колеса, м.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ | 2009 |
|
RU2393460C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С АЭРОДРОМНЫМ ПОКРЫТИЕМ | 2005 |
|
RU2298166C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2390003C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ | 2006 |
|
RU2308705C1 |

