Текст описания приведен в факсимильном виде.


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ СО СЛОЖНЫМ ЗАКОНОМ МОДУЛЯЦИИ | 2001 |
|
RU2293356C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ПРОТЯЖЕННОГО ОБЪЕКТА | 1992 |
|
RU2078352C1 |
| КОРРЕКТОР ДВИЖЕНИЙ | 2004 |
|
RU2277948C2 |
| СПОСОБ ПЕЛЕНГАЦИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2093856C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ПОДВОДНОЙ ЛОДКИ | 2004 |
|
RU2281528C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИЗЛУЧАЮЩЕЙ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2444748C2 |
| УСТРОЙСТВО ПЕЛЕНГАЦИИ ИСТОЧНИКОВ АКТИВНОЙ ШУМОВОЙ ПОМЕХИ | 1992 |
|
RU2072527C1 |
| СТАНЦИЯ ПОМЕХ | 2010 |
|
RU2434241C1 |
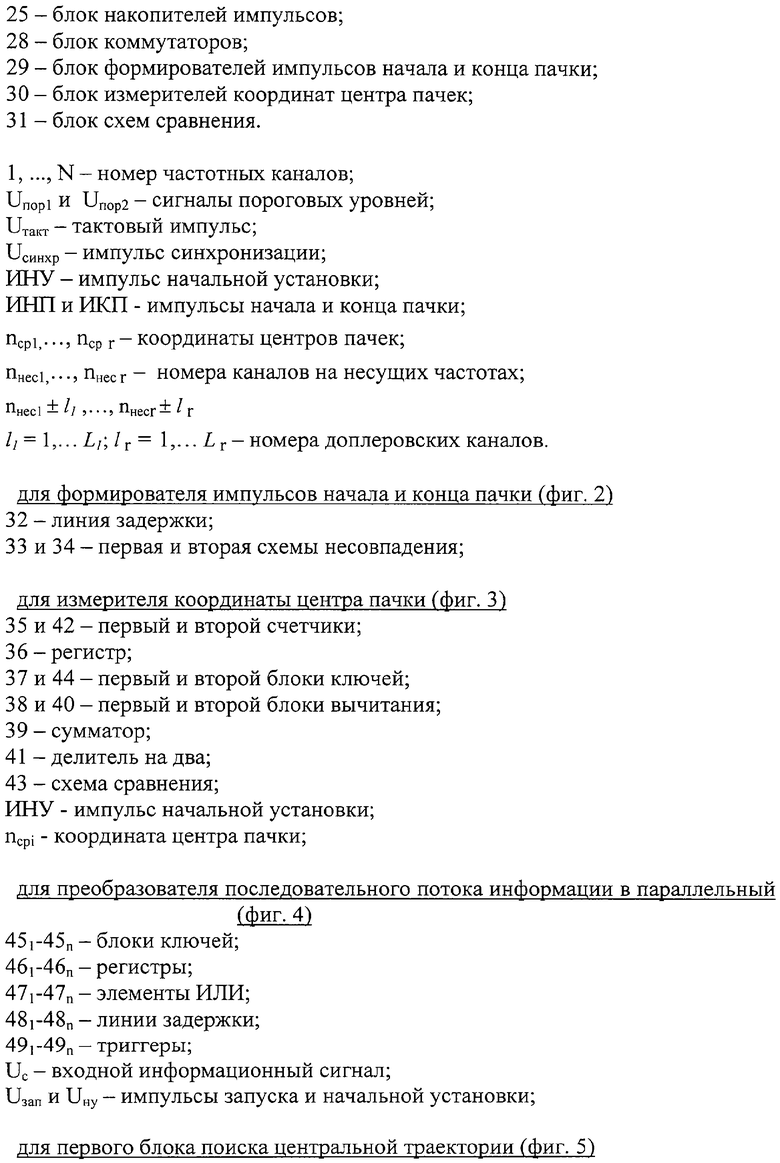
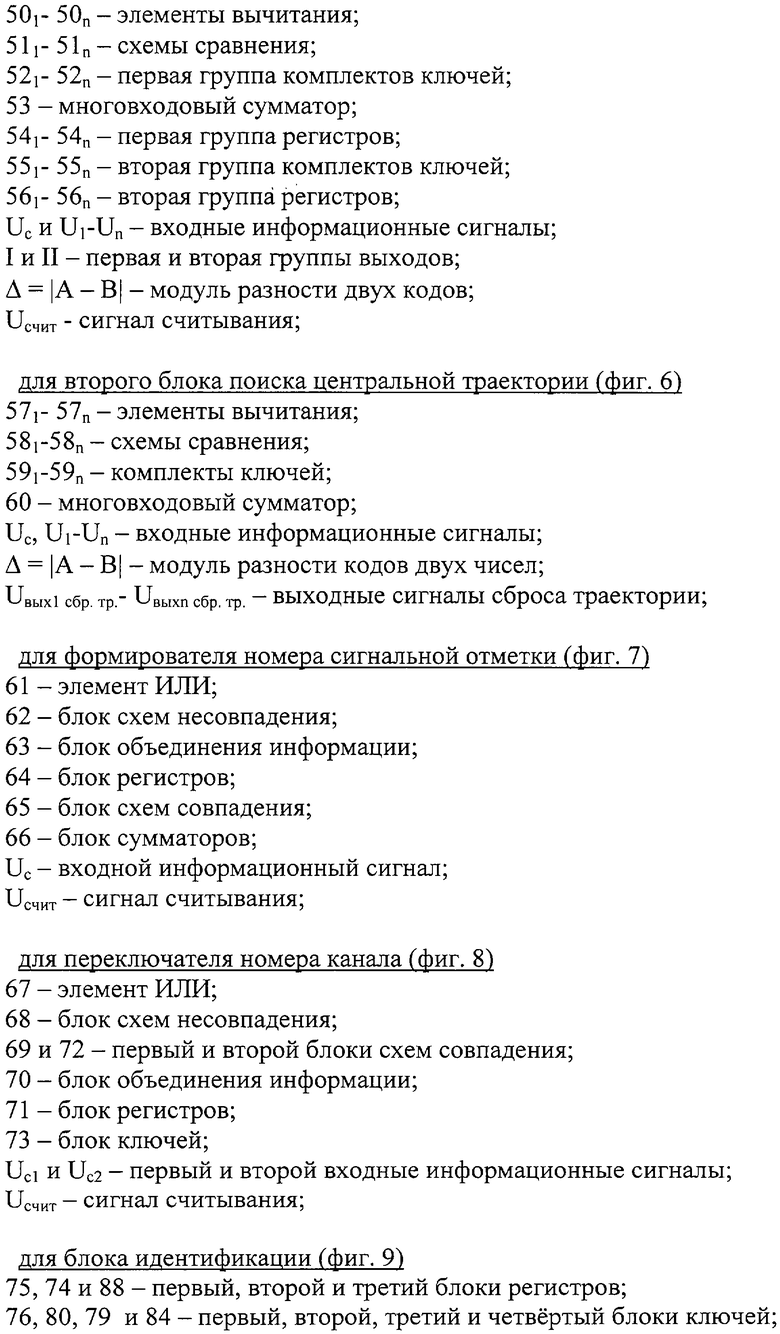
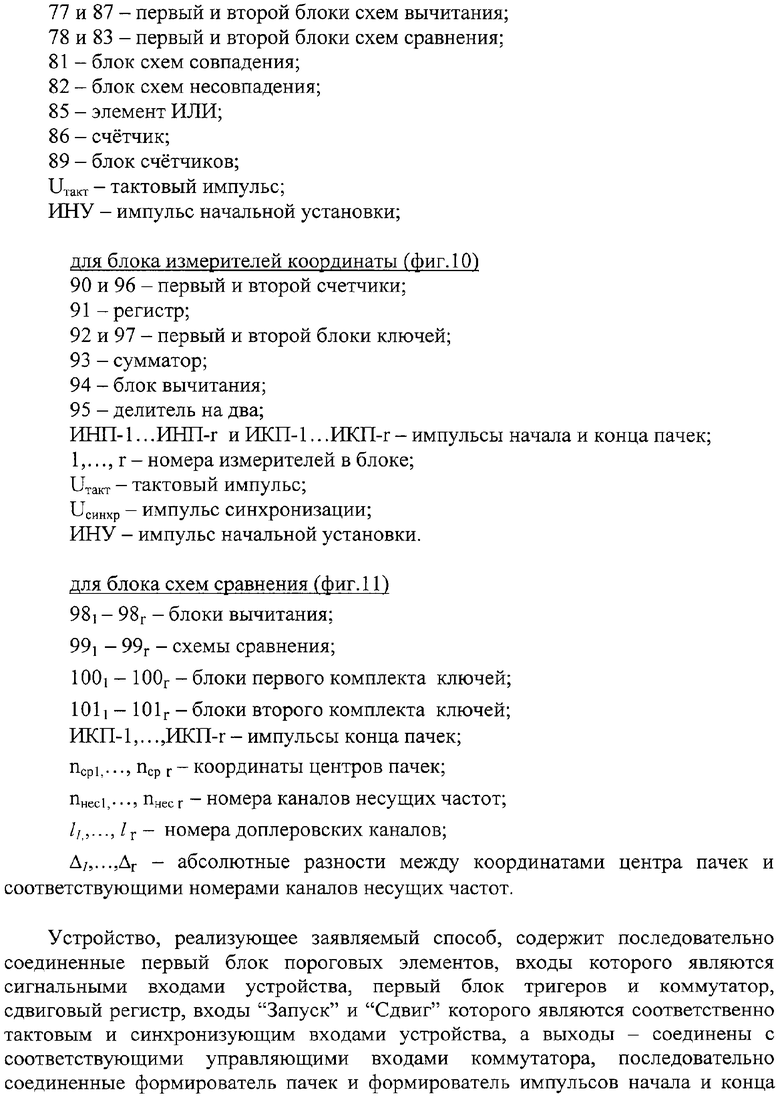
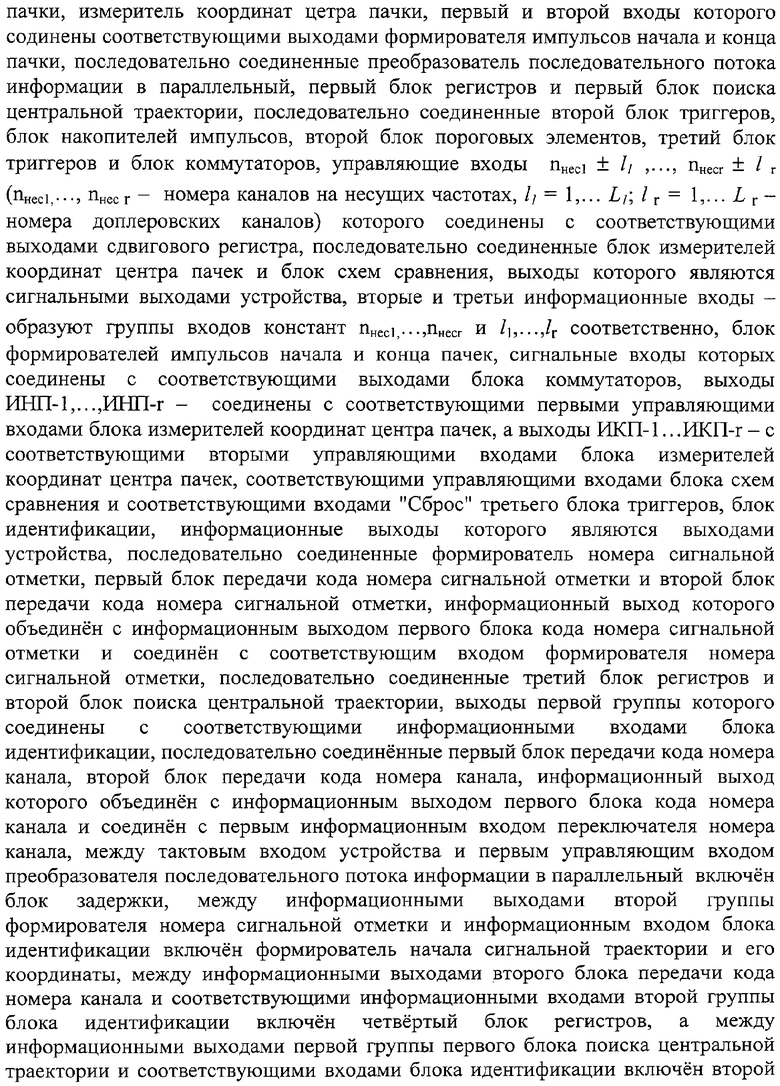
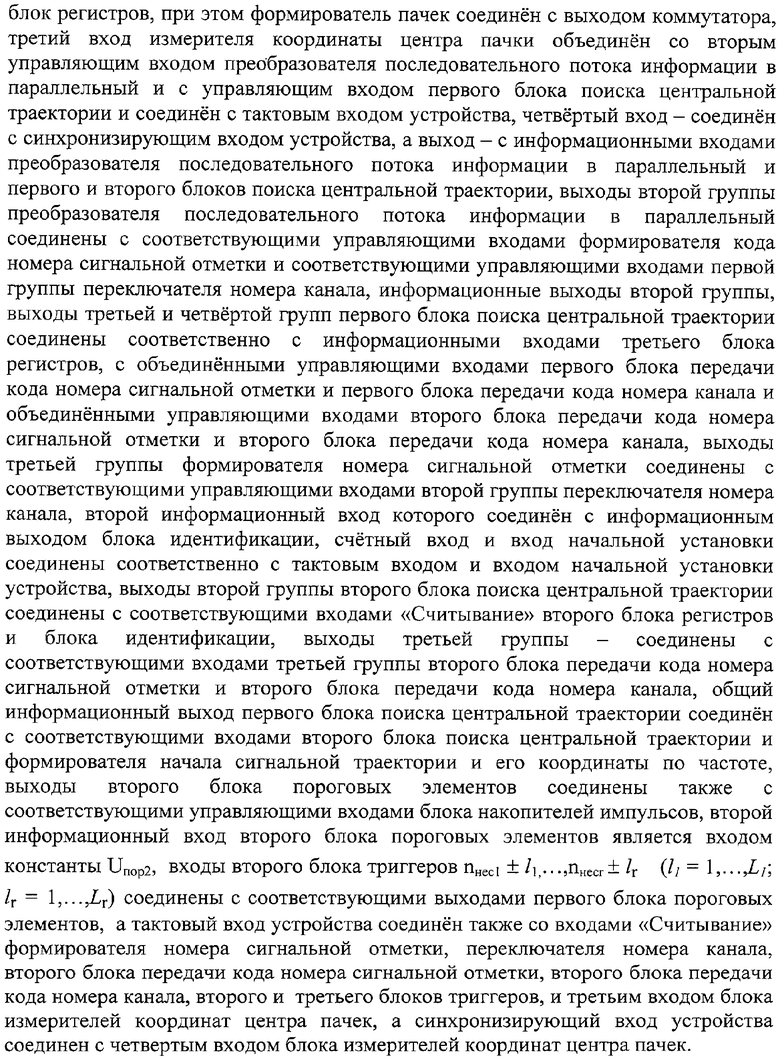
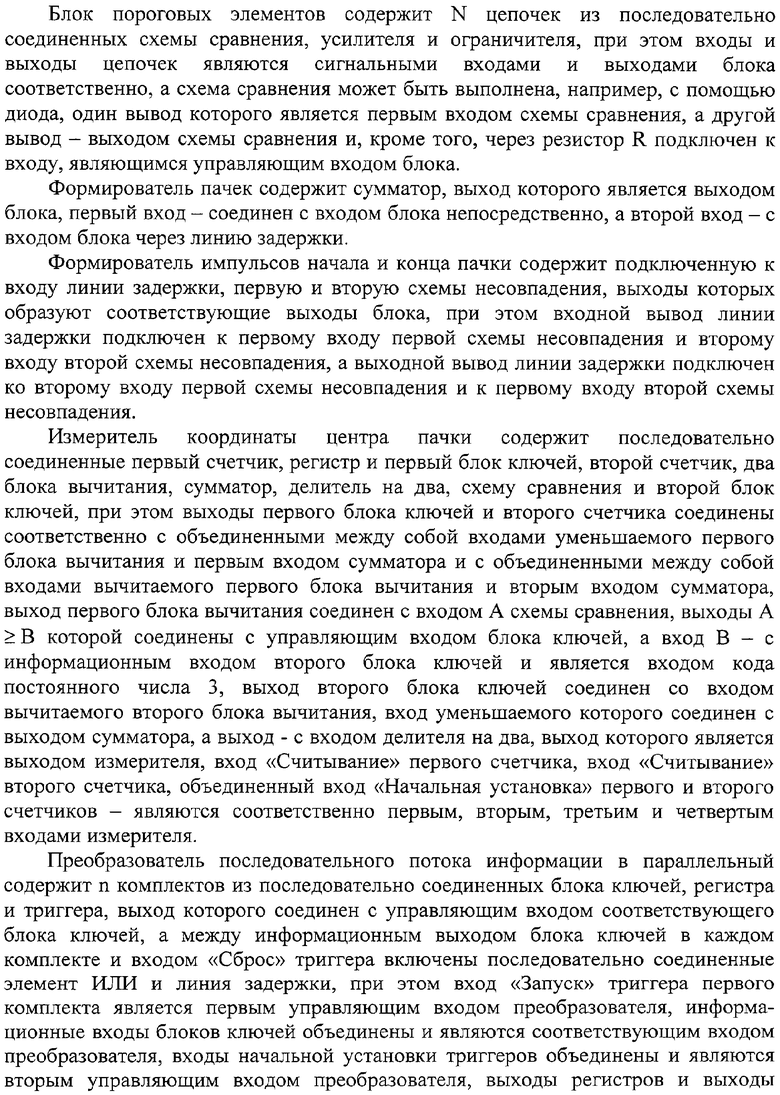
Изобретение относится к области гидроакустики и может быть использовано в гидроакустических системах пассивного обнаружения гидробионтов и активных гидроакустических средств. Техническим результатом изобретения является расширение функциональных возможностей. В способе обработки гидроакустических сигналов со сложным законом модуляции, помимо обнаружения сигналов методом траекторного сопровождения по центру частотно-временной структуры (ЧВС) сигнала, производят также обнаружение и распознавание сигналов гидроакустической связи, которые являются нежелательными, поскольку при выбранном алгоритме обработки они могут восприниматься как сигналы со сложным законом модуляции с последующей ложной классификацией несуществующих объектов. В заявляемом способе вырабатывается признак принадлежности принимаемого сигнала к определенному классу из известного набора сигналов связи. По признаку принадлежности к определенному классу в дальнейшем может быть использован запрет на прием сигналов связи для классификации объектов. 11 ил.
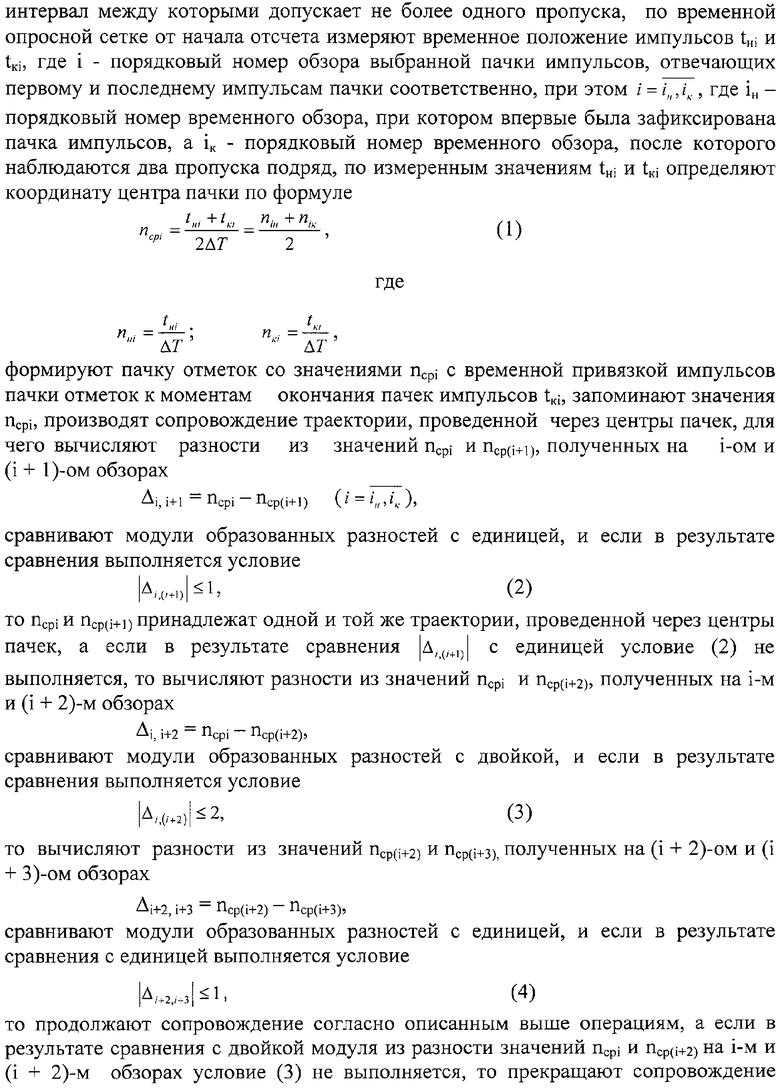
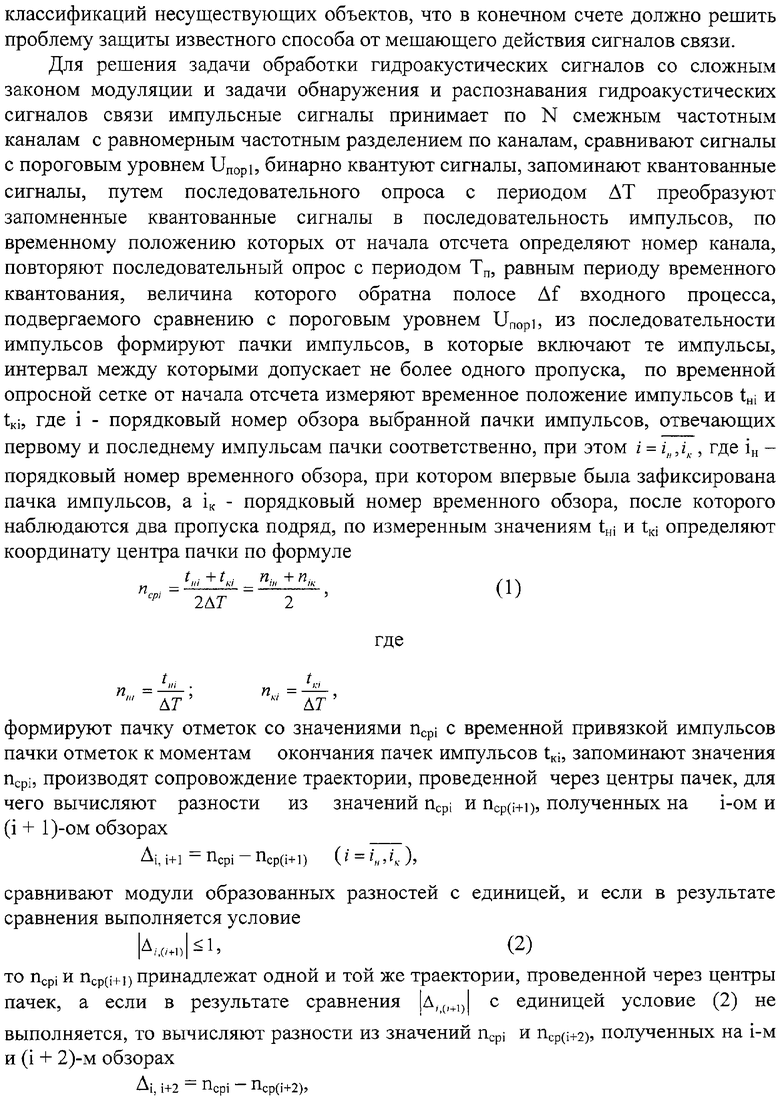
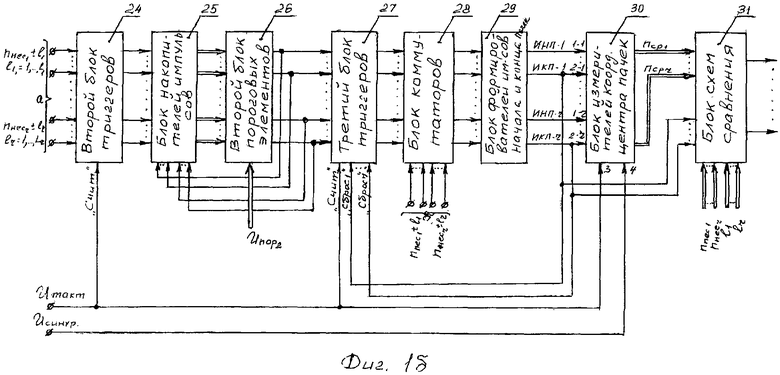
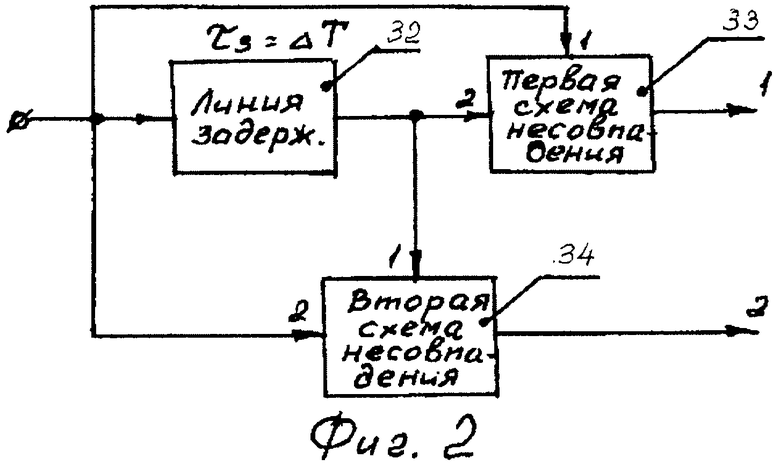
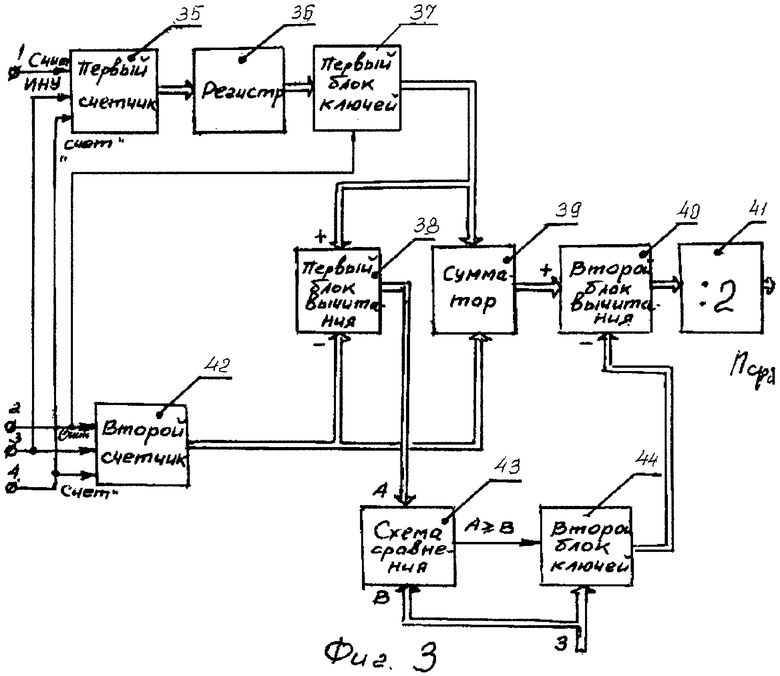
Способ обработки гидроакустических сигналов со сложным законом модуляции, при котором гидроакустические сигналы принимают по N смежным частотным каналам с равномерным частотным разделением по каналам, сравнивают сигналы с пороговым уровнем Uпop1, бинарно квантуют сигналы, запоминают квантованные сигналы, путем последовательного опроса с периодом ΔT преобразуют запомненные квантованные сигналы в последовательность импульсов, по временному положению которых от начала отсчета определяют номер канала, повторяют последовательный опрос с периодом Тп, равным периоду временного квантования, величина которого обратна полосе Δf входного процесса, подвергаемого сравнению с пороговым уровнем Uпop1, из последовательности импульсов формируют пачки импульсов, в которые включают те импульсы, интервал между которыми допускает не более одного пропуска, по временной опросной сетке от начала отсчета измеряют временное положение импульсов tнi и tki, где i - порядковый номер обзора выбранной пачки импульсов, отвечающих первому и последнему импульсам пачки соответственно, при этом  , где iн - порядковый номер временного обзора, при котором впервые была зафиксирована пачка импульсов, a ik - порядковый номер временного обзора, после которого наблюдаются два пропуска подряд, по измеренным значениям tнi и tki определяют координату центра пачки по формуле
, где iн - порядковый номер временного обзора, при котором впервые была зафиксирована пачка импульсов, a ik - порядковый номер временного обзора, после которого наблюдаются два пропуска подряд, по измеренным значениям tнi и tki определяют координату центра пачки по формуле

где 
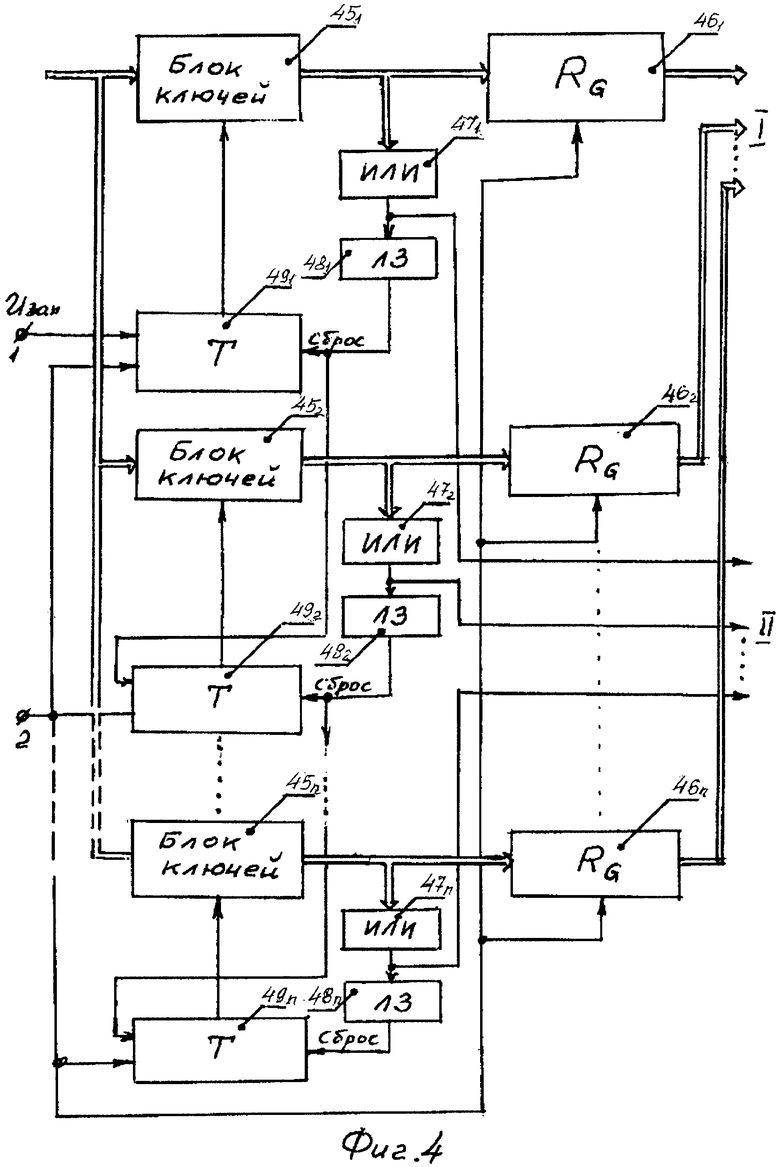
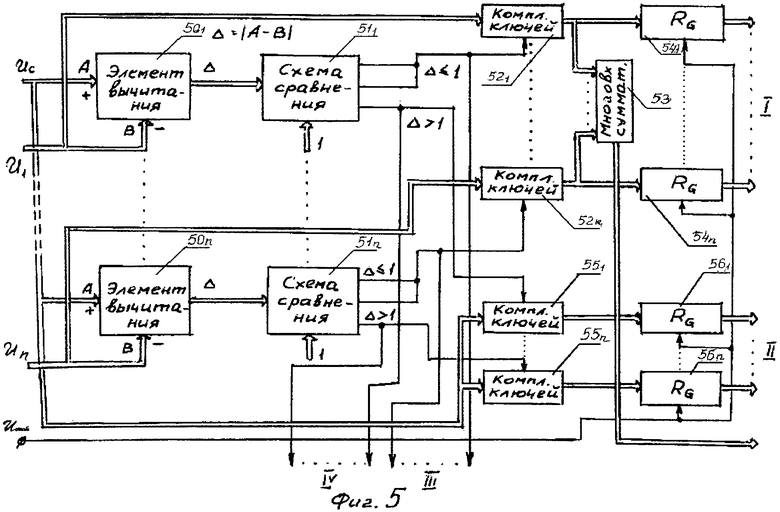
формируют пачку отметок со значениями nсрi с временной привязкой импульсов пачки отметок к моментам окончания пачек импульсов tki, запоминают значения nсрi, производят сопровождение траектории, проведенной через центры пачек, для чего вычисляют разности из значений nсрi и nср(i+1), полученных на i-м и (i+1)-м обзорах

сравнивают модули образованных разностей с единицей, и если в результате сравнения выполняется условие

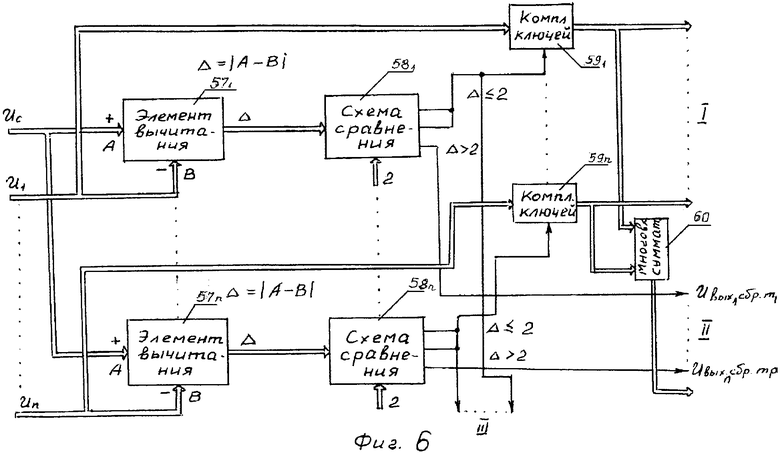
то nсрi, и nср(i+1) принадлежат одной и той же траектории, проведенной через центры пачек, а если в результате сравнения  с единицей условие (2) не выполняется, то вычисляют разности из значений nсрi и nср(i+2), полученных на i-м и (i+2)-м обзорах
с единицей условие (2) не выполняется, то вычисляют разности из значений nсрi и nср(i+2), полученных на i-м и (i+2)-м обзорах

сравнивают модули образованных разностей с двойкой, и если в результате сравнения выполняется условие

то вычисляют разности из значений nср(i+2) и nср(i+3), полученных на (i+2)-м и (i+3)-м обзорах

сравнивают модули образованных разностей с единицей, и если в результате сравнения с единицей выполняется условие

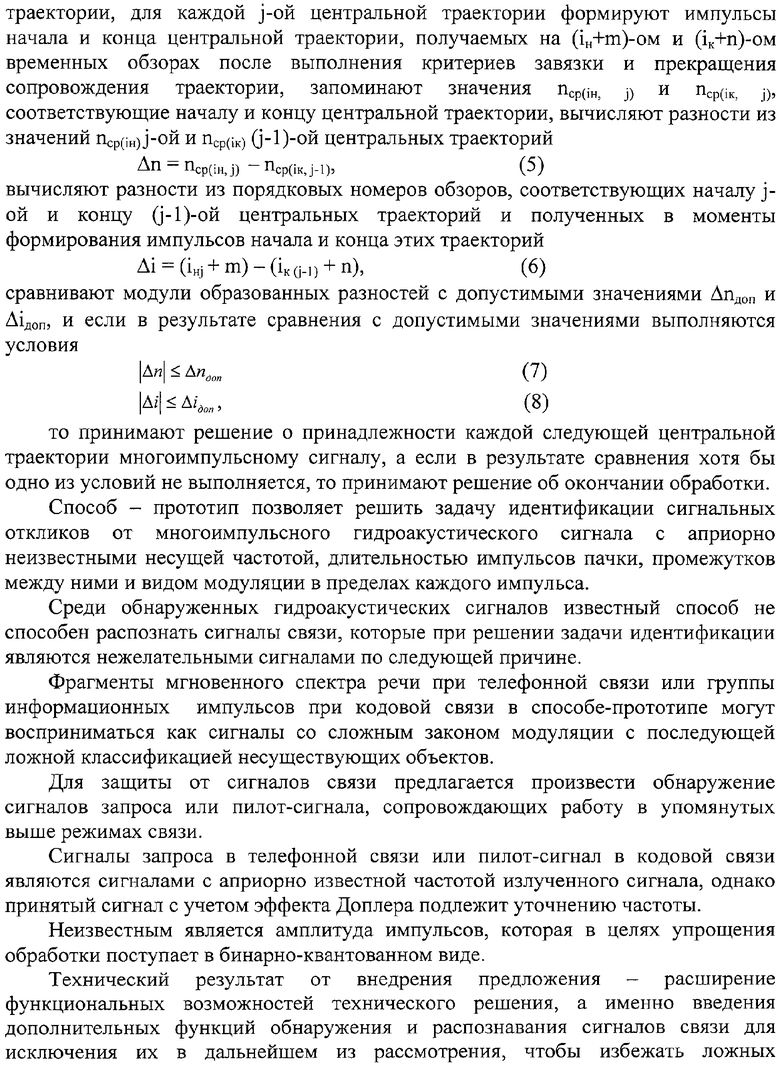
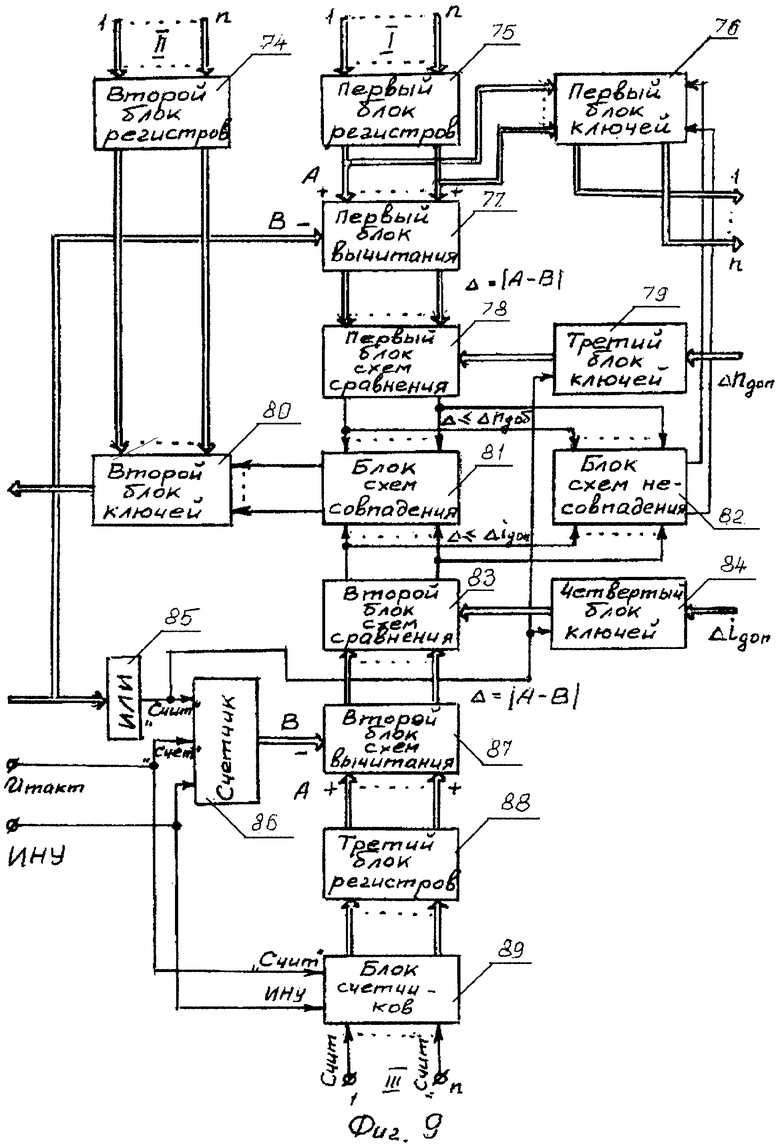
то продолжают сопровождение согласно описанным выше операциям, а если в результате сравнения с двойкой модуля из разности значений ncpi и nср(i+2) на i-м и (i+2)-м обзорах условие (3) не выполняется, то прекращают сопровождение траектории, для каждой j-й центральной траектории формируют импульсы начала и конца центральной траектории, получаемых на (iн+m)-м и (iк+n)-м временных обзорах после выполнения критериев завязки и прекращения сопровождения траектории, запоминают значения nср(iн, j) и ncp(ik, j), соответствующие началу и концу центральной траектории, вычисляют разности из значений nср(iн)j-й и ncp(ik) (j-1)-й центральных траекторий

вычисляют разности из порядковых номеров обзоров, соответствующих началу j-й и концу (j-1)-й центральных траекторий и полученных в моменты формирования импульсов начала и конца этих траекторий

сравнивают модули образованных разностей с допустимыми значениями Δnдоп и Δiдоп, и если в результате сравнения с допустимыми значениями выполняются условия


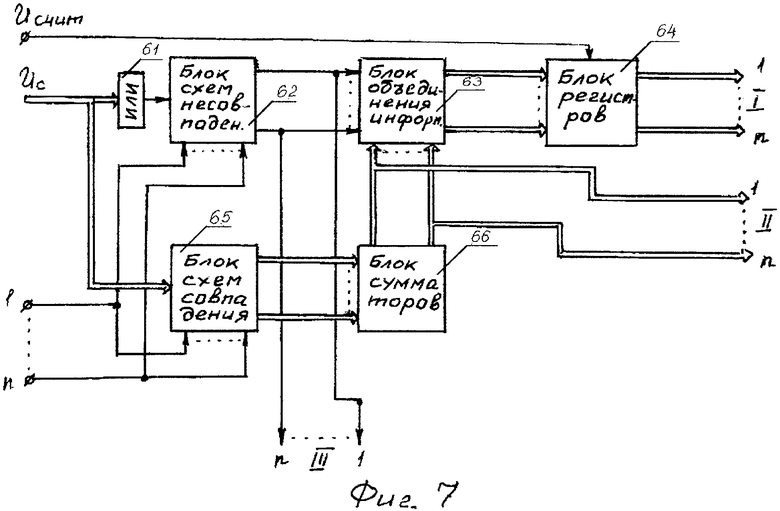
то принимают решение о принадлежности каждой следующей центральной траектории многоимпульсному сигналу, а если в результате сравнения хотя бы одно из условий не выполняется, то принимают решение об окончании обработки, отличающийся тем, что с интервалом временного опроса Тп суммируют квантованные импульсы последовательностей на определенных частотах с номерами каналов
nнесr± r,
r,
где под индексом r следует понимать тот или иной сигнал запроса или пилот-сигнал, используемых в системах связи, nнесr - канал с известной несущей частотой,

ΔF1допr - доплеровский диапазон на несущей частоте fнесr,
ΔF - ширина полосы элементарного канала спектроанализатора по уровню 0,7,
сравнивают суммарные сигналы в r-х каналах с порогом обнаружения Uпop2=mUпop1
где Р1 и Р2 - вероятность ложной тревоги на входе и выходе каждого элементарного канала,
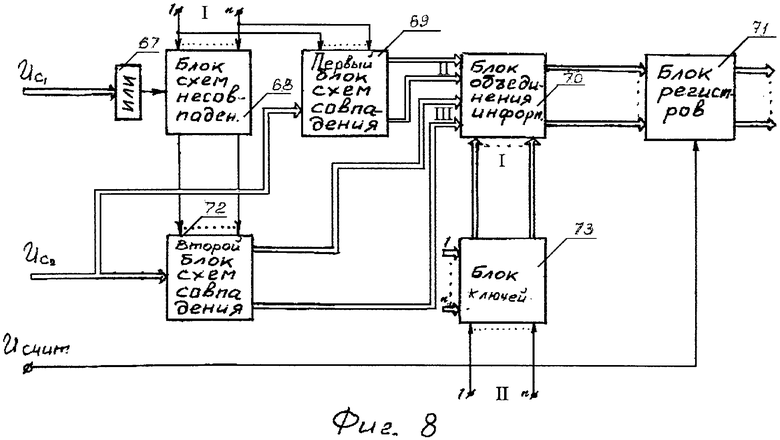
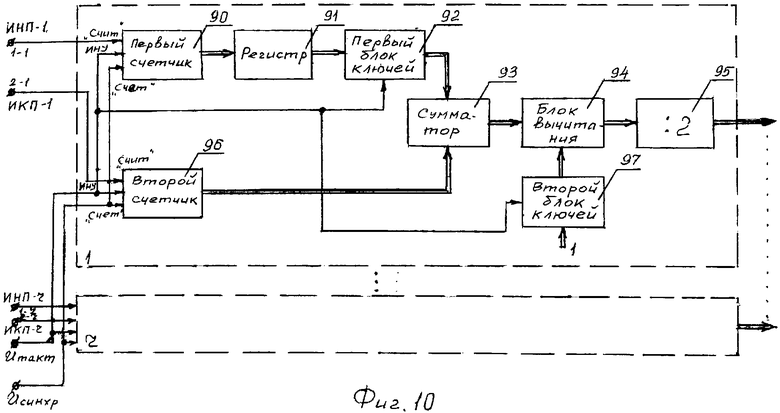
сигналы превышения порога бинарно квантуют, запоминают квантованные сигналы, путем последовательного опроса с периодом ΔT преобразуют запомненные квантованные сигналы в последовательность импульсов, по временному положению которых от начала отсчета определяют номер канала, из последовательности импульсов формируют пачки непрерывных импульсов, по временной опросной сетке от начала отсчета измеряют временное положение импульсов tнsr и tksr, где s - порядковый номер обзора выбранной пачки импульсов, при этом  , где sн - порядковый номер временного обзора, при котором впервые была зафиксирована пачка импульсов, a sk - порядковый номер временного обзора конца пачки импульсов, по измеренным значениям tнsr и tksr определяют координату центра пачки по формуле
, где sн - порядковый номер временного обзора, при котором впервые была зафиксирована пачка импульсов, a sk - порядковый номер временного обзора конца пачки импульсов, по измеренным значениям tнsr и tksr определяют координату центра пачки по формуле

где 

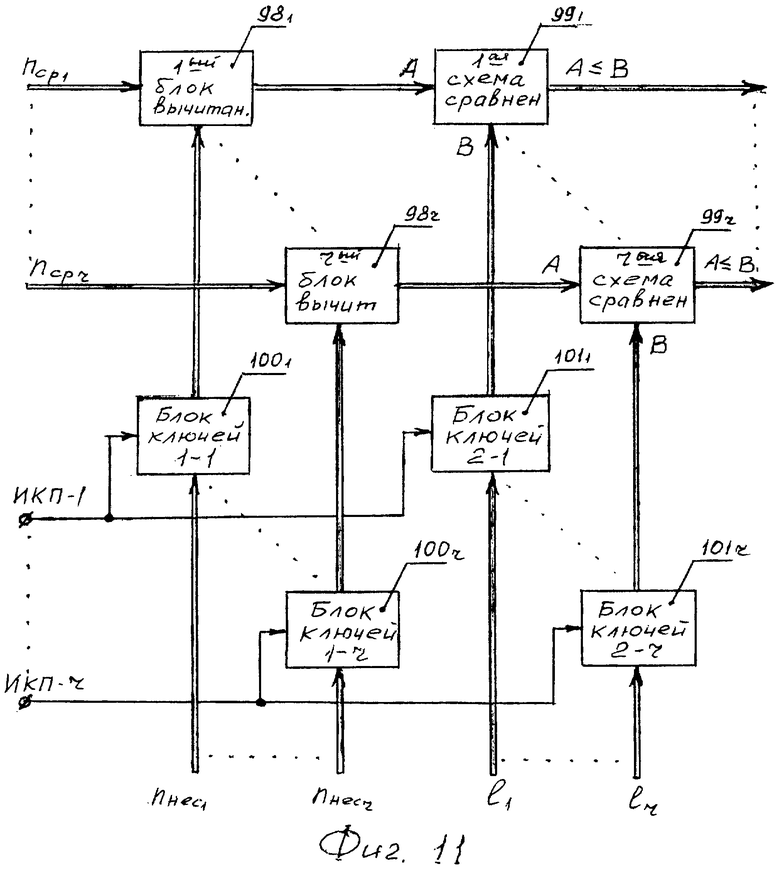
сравнивают ncpsr со значениями nнесr сигналов запроса или пилот-сигнала, и если в результате сравнения выполняется условие
то принимают решение о принадлежности принимаемого сигнала к определенному классу из числа упомянутых выше сигналов связи.
| RU 2001125507 A, 10.07.2003 | |||
| СПОСОБ РЕГИСТРАЦИИ АКУСТИЧЕСКОЙ ВОЛНЫ | 2000 |
|
RU2189050C2 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| СПОСОБ И УСТРОЙСТВО ПОИСКА ПИЛОТ-СИГНАЛА В СОТОВОЙ СИСТЕМЕ СВЯЗИ | 1995 |
|
RU2150176C1 |
| US 6411566 В1, 25.06.2002 | |||
| US 5278774 A, 11.01.1994. | |||

