Область техники
Изобретение относится к демодулятору и способу компенсации фазы и, более конкретно, к демодулятору и способу компенсации фазы, способному эффективно уменьшать фазовую флуктуацию, появляющуюся при полусинхронном детектировании, в цифровой радиопередаче данных.
Описание предшествующего уровня техники
До настоящего времени полусинхронное детектирование используется в качестве демодулятора цифровой радиопередачи данных. В полусинхронном детектировании, так как частота гетеродинного колебания не полностью идентична несущей частоте принятого сигнала, поворот фазы (фазовая флуктуация) в соответствии с этими различиями частот остается в сигнале основной полосы после демодуляции.
Если поворот фазы остается, передаваемые данные не могут быть восстановлены корректно (возникают ошибки демодуляции). Соответствующим образом, в качестве метода устранения этого поворота фазы обычно используется контур восстановления несущей.
Однако в стандартном контуре восстановления несущей имеется проблема, заключающаяся в том, что поворот фазы не может быть устранен полностью.
В качестве примера, который решает такую проблему, имеется демодулятор, который включает в себя контур компенсации фазы (контур с прямой связью), включенный каскадно, в дополнение к стандартному контуру восстановления несущей (контуру с обратной связью) (см. JP 2002-111766).
Стандартный демодулятор определяет, насколько демодулированный сигнал на выходе контура восстановления несущей смещен относительно предопределенного фазового положения в прямоугольной системе координат, в контуре компенсации фазы с прямой связью, и осуществляет компенсацию быстрой фазовой флуктуации, которая производится во время переключения линии на резервную линию с активной линии. То есть стандартный демодулятор устраняет быструю фазовую флуктуацию, которая не может быть устранена контуром восстановления несущей с последующим контуром компенсации фазы с прямой связью.
Работа стандартного демодулятора выполняется так, что фазовый детектор обнаруживает фазовую флуктуацию во время переключения линии, и бесконечный фазовращатель добавляет к демодулированному сигналу обратный поворот фазы с величиной компенсации фазы для осуществления компенсации фазовой флуктуации.
Однако выходной сигнал фазового детектора содержит, в общем случае, шумовой компонент (фазовый шум), обусловленный самим фазовым детектором, независимо от фазовой флуктуации принятого сигнала. Поэтому в состоянии, где не имеется переключения линии, пока контур компенсации фазы с прямой связью находится в рабочем состоянии, фазовый шум остается, имеет место проблема ухудшения характеристики демодуляции.
Ниже поясняется соотношение между шириной полосы контура и отношением мощности несущей к шуму (C/N) в пределе синхронной операции несущей. Фиг.3 - это диаграмма, показывающая отношение между полосой пропускания контура и отношением мощности несущей к шуму (C/N) в пределе синхронной операции несущей.
Согласно фиг.3, по мере того как реакция на принимаемый сигнал замеряется (ширина полосы контура является узкой), ухудшение C/N из-за дрожания (флуктуации) несущей уменьшается и синхронизация несущей может поддерживаться до низкого отношения C/N принятого сигнала. В то же время, по мере того как реакция на принимаемый сигнал ускоряется (ширина полосы контура является широкой), фазовый шум подавляется и ухудшение C/N из-за дрожания несущей становится преобладающим.
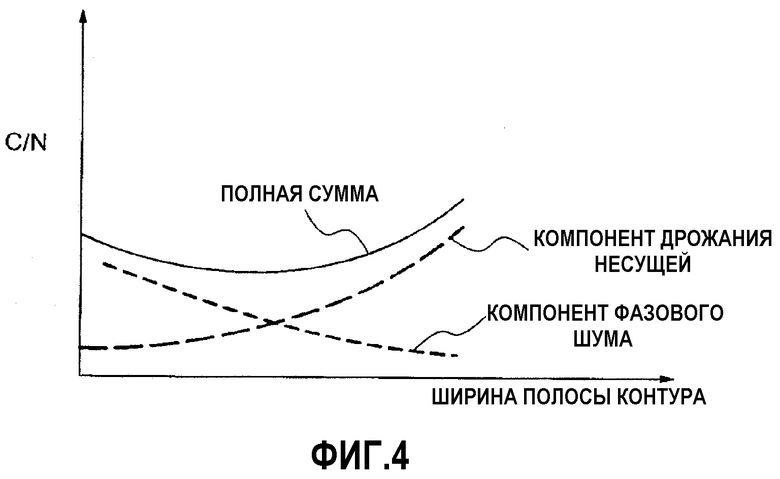
Далее поясняется соотношение между шириной полосы контура и C/N на характеристике частоты появления ошибочных битов (BER). На фиг.4 представлена диаграмма, показывающая отношение между шириной полосы контура и отношением мощности несущей к шуму (C/N) на характеристике частоты появления ошибочных битов (BER).
Согласно фиг.4, а также фиг.3 по мере сужения ширины полосы контура влияние дрожания несущей становится малым. В то же время по мере расширения полосы контура ухудшение C/N из-за фазового шума уменьшается, а ухудшение C/N из-за дрожания несущей увеличивается.
Согласно вышеизложенному пояснению при узкой полосе контура шумовой компонент сигнала, принятый извне контура, подавляется, в то время как при широкой полосе контура подавляется шумовой компонент, генерируемый внутри контура.
В случае традиционного демодулятора, упомянутого выше, хотя контур компенсации фазы с прямой связью может осуществлять компенсацию быстрой фазовой флуктуации (ошибок демодуляции), которая имеет место во время переключения линии на резервную линию с активной линии, не учитывается уменьшение шумового компонента (фазового шума), обусловленного самим фазовым детектором.
Поэтому, когда контур компенсации фазы с прямой связью находится в рабочем состоянии без переключения линии, упомянутый выше демодулятор, напротив, испытывает проблему ухудшения характеристики демодуляции.
Сущность изобретения
Настоящее изобретение направлено на решение вышеописанных и других проблем. Достигаемым техническим результатом настоящего изобретения является эффективное устранение фазовых флуктуаций, которые не могут быть полностью устранены контуром восстановления несущей (контуром с обратной связью), с помощью последующего контура компенсации фазы с прямой связью, который совместно использует фазовый детектор контура восстановления несущей.
Вышеуказанный и другие результаты достигаются, согласно настоящему изобретению, в демодуляторе, включающем в себя контур восстановления несущей, который принимает цифровой сигнал после полусинхронного детектирования, обнаруживает сдвиг фазы цифрового сигнала на предопределенное фазовое положение и осуществляет компенсацию фазы принятого цифрового сигнала на первую величину компенсации на основе обнаруженного сдвига фазы для генерирования выходного сигнала; и контур компенсации фазы с прямой связью, который генерирует среднюю величину обнаруженного сдвига фазы и осуществляет компенсацию фазы выходного сигнала контура восстановления несущей на вторую величину компенсации на основе усредненного сдвига фазы.
Также для достижения вышеуказанных и других технических результатов настоящее изобретение предусматривает способ компенсации фазы, содержащий обнаружение сдвига фазы принятого цифрового сигнала после полусинхронного детектирования на предопределенное фазовое положение; осуществление компенсации фазы принятого цифрового сигнала на первую величину компенсации на основе обнаруженного сдвига фазы для генерирования выходного сигнала; усреднение величины обнаруженного сдвига фазы; и осуществление компенсации фазы сигнала, скомпенсированного с помощью первой величины компенсации, посредством второй величины компенсации на основе усредненной величины.
Кроме того, для достижения вышеуказанных и других технических результатов настоящее изобретение предусматривает демодулятор, содержащий квадратурный детектор, который преобразует принятый сигнал в сигналы основной полосы синфазного канала и квадратурного канала с помощью умножения на гетеродинную частоту; фильтры нижних частот, которые устраняют ненужные высокочастотные компоненты из сигналов основной полосы; аналого-цифровые преобразователи (A/D), которые преобразуют сигналы основной полосы после фильтрации в цифровые сигналы; контур восстановления несущей, который обнаруживает сдвиг фазы цифровых сигналов на предопределенное фазовое положение и осуществляет компенсацию фазы цифрового сигнала на первую величину компенсации на основе обнаруженного сдвига фазы для генерирования выходного сигнала; и контур компенсации фазы с прямой связью, который генерирует среднюю величину обнаруженного сдвига фазы и осуществляет компенсацию фазы выходного сигнала контура восстановления несущей на вторую величину компенсации на основе усредненного сдвига фазы. Согласно вышеописанной структуре демодулятор, соответствующий настоящему изобретению, может эффективно устранять фазовую флуктуацию, которая не может быть полностью устранена контуром восстановления несущей (контуром с обратной связью), с помощью последующего контура компенсации фазы с прямой связью (контуром с прямой связью), который совместно использует фазовый детектор контура восстановления несущей.
Краткое описание чертежей
Вышеописанные и другие признаки и преимущества настоящего изобретения поясняются в последующем подробном описании, иллюстрируемом чертежами, на которых представлено следующее:
фиг.1 - блок-схема, показывающая структуру демодулятора согласно иллюстративному варианту осуществления настоящего изобретения;
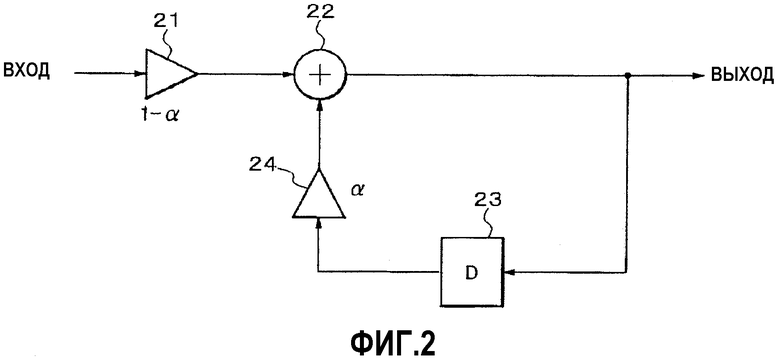
фиг.2 - блок-схема, показывающая структуру схемы усреднения, используемой в демодуляторе, показанном на фиг.1;
фиг.3 - диаграмма, показывающая соотношение между шириной полосы контура и отношением мощности несущей к шуму (C/N) в пределе синхронной операции несущей;
фиг.4 - диаграмма, показывающая соотношение между шириной полосы контура и отношением мощности несущей к шуму (C/N) в характеристике частоты появления ошибочных битов (BER); и
фиг.5 - блок-схема, показывающая структуру демодулятора согласно другому иллюстративному варианту осуществления настоящего изобретения.
Подробное описание иллюстративных вариантов осуществления
Ниже приведено более подробное описание иллюстративного демодулятора согласно настоящему изобретению со ссылкой на чертежи. На фиг.1 представлена блок-схема, показывающая структуру демодулятора согласно иллюстративному варианту осуществления настоящего изобретения.
Согласно фиг.1 демодулятор согласно иллюстративному варианту осуществления настоящего изобретения включает в себя квадратурный детектор (DEM) 1, гетеродин (LO) 2, фильтры нижних частот (LPF) 3 и 4, аналого-цифровые преобразователи (A/D) 5 и 6, контур 7 восстановления несущей, контур 8 компенсации фазы с прямой связью.
Контур 7 восстановления несущей включает в себя бесконечный фазовращатель (EPS) 9, фазовый детектор (PD) 10, фильтр 11 контура, числовой управляемый генератор (NCO) 12. Кроме того, контур 8 компенсации фазы с прямой связью включает в себя схему 13 задержки (DELAY, Задержка), схему 14 усреднения (AVERAGE, Усреднение), числовой управляемый генератор (NCO) 15 и бесконечный фазовращатель (EPS) 16, в дополнение к фазовому детектору (PD) 10, который используется совместно.
Работа соответствующих блоков демодулятора согласно этому иллюстративному варианту осуществления описана ниже со ссылками на чертежи.
Согласно фиг.1 квадратурный детектор (DEM) 1 преобразует принятый сигнал промежуточной частоты (IF) в синфазный и квадратурный сигналы основной полосы путем умножения на выходной сигнал гетеродина 2 и подает сигналы основной полосы в фильтры 3 и 4 нижних частот соответственно.
Гетеродин (LO) 2 подает гетеродинный сигнал на частоте, близкой к (почти такой же) несущей частоте принятого сигнала, на квадратурный детектор 1.
Каждый из фильтров 3 и 4 нижних частот (LPF) устраняет ненужный высокочастотный компонент, то есть добавленный компонент после умножения, из каждого из сигналов основной полосы с выхода квадратурного детектора 1 и подает сигналы основной полосы после фильтрации в аналого-цифровые преобразователи 5 и 6.
Аналого-цифровые преобразователи (A/D) 5 и 6 преобразуют соответственно выходные сигналы фильтров 3 и 4 нижних частот в цифровые сигналы и подают эти цифровые сигналы в бесконечный фазовращатель 9 контура 7 восстановления несущей.
Бесконечный фазовращатель (EPS) 9 контура 7 восстановления несущей выполняет комплексное умножение (поворот фазы) каждого из сигналов с выходов из аналого-цифровых преобразователей 5 и 6 на сигнал компенсации фазы (первой величины компенсации) с выхода числового управляемого генератора 12, выводит скомпенсированный по фазе сигнал и подает скомпенсированный по фазе сигнал в схему 13 задержки контура 8 компенсации фазы с прямой связью.
Фазовый детектор (PD) 10 обнаруживает, насколько каждый выходной сигнал бесконечного фазовращателя 9 сдвинут по фазе в предопределенное фазовое положение в прямоугольной системе координат, и подает результат (информацию сдвига фазы) в фильтр 11 контура. Кроме того, фазовый детектор 10 подает информацию сдвига фазы также в схему 14 усреднения контура 8 компенсации фазы с прямой связью.
Фильтр 11 контура подавляет шумовой компонент, содержащийся в информации сдвига фазы с выхода фазового детектора 10 и подает величину автоматического управления фазой (APC) в числовой управляемый генератор 12.
Числовой управляемый генератор (NCO) 12 преобразует величину APC с выхода фильтра 11 контура в величину Θ компенсации фазы (первую величину компенсации), подает величины Θ (величины компенсации фазы; sin Θ и cos Θ) на бесконечный фазовращатель 9.
Схема 13 задержки контура 8 компенсации фазы с прямой связью подает сигнал, задержанный только на предопределенное время задержки, требуемое, чтобы фазовый детектор 10 мог обнаружить сдвиг фазы и числовой управляемый генератор 12 мог вывести величины Θ на бесконечный фазовращатель 16.
Ниже подробно описана структура схемы усреднения, показанной на фиг.1. На фиг.2 представлена блок-схема, показывающая структуру схемы усреднения, используемой в демодуляторе, показанном на фиг.1.
Схема 14 усреднения включает в себя усилитель 21 коэффициента усиления, сумматор 22, схему 23 задержки и усилитель 24 коэффициента усиления, как показано на фиг.2.
Схема 14 усреднения складывает выходной сигнал усилителя 21 коэффициента усиления, который усиливает принятый сигнал с коэффициентом (1-α) (параметр α - число, меньшее, чем "1") и выходной сигнал усилителя 24 коэффициента усиления посредством сумматора 22, задерживает суммарный выходной сигнал на предопределенный период и подает сигнал, который является задержанным сигналом, усиленным с коэффициентом α посредством усилителя 24 коэффициента усиления, в сумматор 22.
Чувствительность схемы 14 усреднения определяется параметром α усилителей 21 и 24 коэффициента усиления, и известно, что фазовые флуктуации усредняются по длительному периоду (реакция контура становится медленной), в то время как параметр α становится близким к "1".
Так как шумовой компонент в выходном сигнале фазового детектора 10 сводится к "0" процедурой усреднения, шумовой компонент на выходе фазового детектора 10 может быть полностью подавлен посредством процедуры усреднения, включенной в этот контур.
Числовой управляющий генератор 15 преобразует информацию усредненного сдвига фазы с выхода схемы 14 усреднения в величину Φ компенсации фазы (вторую величину компенсации) и подает величины Θ (величины компенсации фазы; sin Φ и cos Φ) на бесконечный фазовращатель 16.
Бесконечный фазовращатель 16 добавляет поворот фазы к сигналу, в котором была выполнена временная регулировка схемой 13 задержки посредством величин sin Φ и cos Φ компенсации фазы, и выводит сигналы синфазного (I) канала и квадратурного (Q) канала соответственно.
Детальное выполнение квадратурного детектора 1 и бесконечных фазовращателей 9 и 16 хорошо известно специалистам в данной области техники и здесь не описывается.
Ниже подробно описаны операции компенсации согласно иллюстративному варианту осуществления настоящего изобретения.
Квадратурный детектор 1 умножает принятый сигнал на выходной сигнал гетеродина 2 и выдает синфазный и квадратурный сигналы.
Фильтры 3 и 4 нижних частот устраняют ненужные высокочастотные компоненты, содержащиеся в выходном сигнале квадратурного детектора 1, и извлекают сигналы основной полосы I-канала и Q-канала.
Аналого-цифровые преобразователи 5 и 6 преобразуют принятые сигналы основной полосы в цифровые сигналы и подают эти цифровые сигналы на бесконечный фазовращатель 9, который является составной частью контура 7 восстановления несущей.
Хотя частота гетеродина 2 почти равна несущей частоте принятого сигнала, они не находятся полностью в фазе.
По этой причине поворот фазы согласно этим различиям частот остается в сигнале основной полосы. Если поворот фазы остается, передаваемые данные не могут быть корректно восстановлены. Поэтому контур 7 восстановления несущей устраняет этот поворот фазы с помощью следующей операции.
Во-первых, бесконечный фазовращатель 9 добавляет поворот фазы к демодулированному принятому сигналу посредством компенсации sin Θ и cos Θ фазы с выхода числового управляемого генератора 12. Фазовый детектор 10 обнаруживает, насколько выходной сигнал бесконечного фазовращателя 9 сдвинут относительно предопределенного фазового положения в прямоугольной системе координат, и подает полученный результат (информацию сдвига фазы) в фильтр 11 контура.
Фильтр 11 контура подавляет шумовой компонент в информации сдвига фазы с выхода из фазового детектора 10 и подает величину APC в числовой управляемый генератор 12, который преобразует величину APC с выхода из фильтра 11 контура в величины sin Θ и cos Θ компенсации фазы и подает эти величины как бесконечный фазовращатель 9.
Согласно схеме контура, объясненной выше, если реакция на принятый сигнал является медленной (полоса пропускания контура является узкой), то фазовые флуктуации, содержащиеся в сигнале основной полосы, в частности фазовые флуктуации от различия частот между несущей частотой и гетеродинной частотой, могут быть устранены.
Контур 8 компенсации фазы с прямой связью подавляет быстрые фазовые флуктуации, которые не могут быть устранены контуром 7 восстановления несущей, следующим образом.
Фазовый детектор 10 обнаруживает сдвиг фазы, содержащийся в выходном сигнале бесконечного фазовращателя 9, и подает эту информацию сдвига фазы в схему 14 усреднения. Схема 14 усреднения усредняет выходной сигнал фазового детектора 10, следовательно, подавляет шумовой компонент, содержащийся в выходном сигнале фазового детектора 10, и подает информацию сдвига фазы после усреднения в числовой управляемый генератор 15.
Числовой управляемый генератор 15 преобразует информацию усредненного сдвига фазы с выхода схемы 14 усреднения в величину Φ компенсации фазы и подает величины (sin Φ и cos Φ) компенсации фазы в бесконечный фазовращатель 16.
Схема 13 задержки задерживает выходной сигнал бесконечного фазовращателя 9 до тех пор, пока величины sin Φ и cos Φ компенсации фазы не будут поданы на бесконечный фазовращатель 16, и подает задержанный сигнал на бесконечный фазовращатель 16.
Бесконечный фазовращатель 16 добавляет поворот фазы Φ к выходному сигналу схемы 13 задержки посредством величин sin Φ и cos Φ компенсации фазы с выхода числового управляемого генератора 15.
В этом контуре 8 компенсации фазы с прямой связью быстрые фазовые флуктуации, которые не могут быть устранены контуром 7 восстановления несущей, могут быть устранены посредством его установки более быстродействующим (полоса контура является широкой), чем реакция контура 7 восстановления несущей.
Согласно схеме иллюстративного варианта осуществления настоящего изобретения контур 7 восстановления несущей и контур 8 компенсации фазы с прямой связью в каскадном включении могут быть настроены на надлежащую ширину полосы контура, чтобы подавлять как дрожание несущей, так и быстрые фазовые флуктуации, которые возникают во время переключения линии.
Во-первых, как показано на фиг.3 и 4, контур 7 восстановления несущей настраивается на ширину полосы контура, которая может минимизировать полную величину ухудшения. При этом, когда ширина полосы контура установлена широкой, имеет место эффект подавления ухудшения от дрожания несущей, которое имеет большое влияние.
Далее, контур 8 компенсации фазы с прямой связью устанавливается на широкую полосу контура, большую, чем ширина полосы контура 7 восстановления несущей, так что подавляются быстрые фазовые флуктуации, которые происходят во время переключения линии. В это время фазовый шум, обусловленный самим фазовым детектором, как общеизвестно для стандартной технологии, подавляется схемой 14 усреднения, подсоединенной к выходному выводу фазового детектора 10.
Поэтому ширина полосы контура 8 компенсации фазы с прямой связью может быть подходящим образом настроена на условия установки, такие как время переключения линии, без учета шумового компонента самого фазового детектора 10.
После этого посредством контура 7 восстановления несущей, который минимизирует полную величину ухудшения, как показано на фиг.3 и 4, и контура 8 компенсации фазы с прямой связью, который устраняет быструю фазовую флуктуацию, даже когда C/N является недостаточным, потерянная синхронизация несущей или ухудшение BER может быть предотвращено, и, более того, ошибка демодуляции может быть уменьшена.
В последние годы в качестве гетеродина принимается синтезатор для генерации изменяемой частоты несущей или уменьшения стоимости. Однако фазовый шум синтезатора является сравнительно большим, он вызывает значительные фазовые флуктуации в сигнале основной полосы. Даже в таком случае, при уменьшении этого варианта осуществления настоящего изобретения, могут быть реализованы регулируемая установка несущей частоты или уменьшение стоимости.
Ниже описан другой иллюстративный вариант осуществления настоящего изобретения со ссылкой на фиг.5, где показана блок-схема, иллюстрирующая структуру демодулятора согласно другому иллюстративному варианту осуществления настоящего изобретения.
Согласно фиг.5 демодулятор согласно другому иллюстративному варианту осуществления настоящего изобретения включает в себя смеситель (MIX) 31, гетеродин (LO) 32, фильтр 33 нижних частот (LPF), аналого-цифровой преобразователь (A/D) 34, квадратурный детектор (DEM) 35, контур 36 восстановления несущей и контур 37 компенсации фазы с прямой связью.
Как показано на фиг.5, демодулятор в этом варианте осуществления преобразует принятый сигнал в цифровой сигнал на промежуточной частоте (IF). Следовательно, демодулятор в этом варианте осуществления отличается от демодулятора, показанного на фиг.1, который преобразует принятый сигнал промежуточной частоты в сигнал основной полосы и затем преобразует его в цифровой сигнал.
Так как схема и работа контура 36 восстановления несущей и контура 37 компенсации фазы с прямой связью являются такими же, как для контура 7 восстановления несущей и контура 8 компенсации фазы с прямой связью, показанных на фиг.1, их подробное описание не приводится.
Хотя изобретение описано в связи с некоторыми иллюстративными вариантами осуществления, следует понимать, что сущность изобретения не должна ограничиваться этими конкретными вариантами осуществления. Напротив, предполагается, что сущность изобретения включает в себя все альтернативы, коррекции и эквиваленты, которые могут быть включены в сущность и объем формулы изобретения.
Кроме того, изобретение должно сохранять все эквиваленты заявляемого изобретения, даже если пункты формулы изобретения изменяются в процессе рассмотрения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352063C1 |
| УСТРОЙСТВО И СПОСОБ КОМПЕНСАЦИИ УЗКОПОЛОСНЫХ ПОМЕХ В ЦИФРОВЫХ РАДИОСИСТЕМАХ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2013 |
|
RU2552850C2 |
| СХЕМА ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ И СХЕМА ДЕМОДУЛЯЦИИ НА ОСНОВЕ СПОСОБА КВАЗИКОГЕРЕНТНОГО ДЕТЕКТИРОВАНИЯ | 2010 |
|
RU2511719C2 |
| ПРИЕМНИК СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 2004 |
|
RU2287225C2 |
| СИСТЕМА СВЯЗИ | 1986 |
|
SU1840155A1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ДЕМОДУЛЯТОРА СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ ВЫСОКИХ ПОРЯДКОВ | 2018 |
|
RU2693272C1 |
| МОДУЛЬ ОЦЕНИВАНИЯ РАСФАЗИРОВКИ, МОДУЛЬ КОМПЕНСАЦИИ РАСФАЗИРОВКИ И КОГЕРЕНТНЫЙ ПРИЕМНИК | 2011 |
|
RU2557012C2 |
| ПАРАЛЛЕЛЬНЫЙ КОРОТКОВОЛНОВЫЙ МОДЕМ | 2004 |
|
RU2286648C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ФАЗОВОГО СДВИГА В ЦЕПИ ОБРАТНОЙ СВЯЗИ УСИЛИТЕЛЯ МОЩНОСТИ (ВАРИАНТЫ) | 1993 |
|
RU2115222C1 |


Изобретение относится к области цифровой передачи данных и может быть использовано для демодуляции и компенсации фазы. Достигаемый технический результат - эффективное устранение фазовых флуктуаций. В способе компенсации фазы демодулятора осуществляется обнаружение сдвига фазы принятого цифрового сигнала после полусинхронного детектирования на предопределенное фазовое положение, компенсация фазы цифрового принятого сигнала посредством первой величины компенсации на основе обнаруженного сдвига фазы, усреднение величины обнаруженного сдвига фазы и осуществление компенсации для фазы сигнала, скомпенсированного с помощью первой величины компенсации, посредством второй величины компенсации на основе усредненной величины. Демодулятор содержит контур восстановления несущей, который принимает цифровой сигнал после полусинхронного детектирования, обнаруживает сдвиг фазы цифрового сигнала на предопределенное фазовое положение и осуществляет компенсацию фазы цифрового сигнала на первую величину компенсации, и контур компенсации фазы с прямой связью, который генерирует среднюю величину обнаруженного сдвига фазы и осуществляет компенсацию фазы сигнала с выхода контура восстановления несущей на вторую величину компенсации на основе усредненного сдвига фазы. 3 н. и 7 з.п. ф-лы, 5 ил.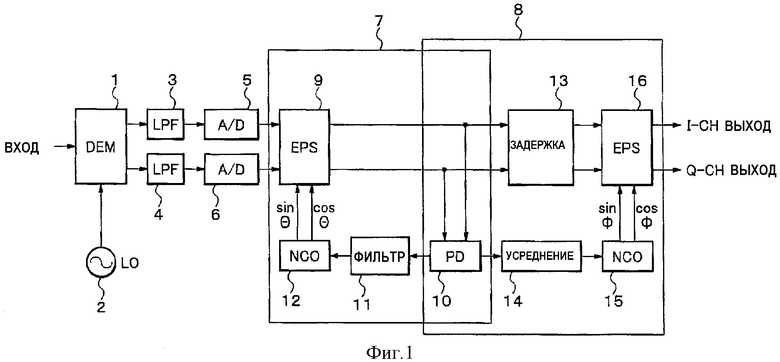
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 2002 |
|
RU2234812C1 |
| US 4518922, 21.05.1985 | |||
| АВТОМАТИЧЕСКАЯ ГРУЗОУПОРНАЯ СЛЕДЯЩАЯ МУФТА-ТОРМОЗ | 0 |
|
SU254061A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

