Область техники, к которой относится изобретение
Настоящее изобретение относится к схеме восстановления несущей и схеме демодуляции на основе способа квазикогерентного детектирования в цифровой системе радиосвязи.
По настоящей заявке на патент испрашивается приоритет по дате подачи заявки на патент Японии № 2009-254164, поданной 5 ноября 2009 г., которая полностью включена в этот документ путем ссылки.
Уровень техники
В последнее время разработаны различные способы для улучшения эффективности использования полос частот, и посредством этого достигается высокоскоростная передача данных в цифровой системе радиосвязи. Например, известны способы исполнения цифровой модуляции/демодуляции с множеством значений согласно способам модуляции, в которых используется информация фазы для принятия решения, например, квадратурная амплитудная модуляция (QAM) и фазовая манипуляция (PSK). В способе модуляции с использованием информации фазы для принятия решения фазовые ошибки (фазовый шум), которые имеют место в передатчике и приемнике, могут вызывать ухудшение вероятности ошибки на бит (BER). Приемник, в котором используется этот способ модуляции, может улучшать свою вероятность ошибки на бит посредством выполнения компенсации фазовой ошибки (компенсации фазового шума).
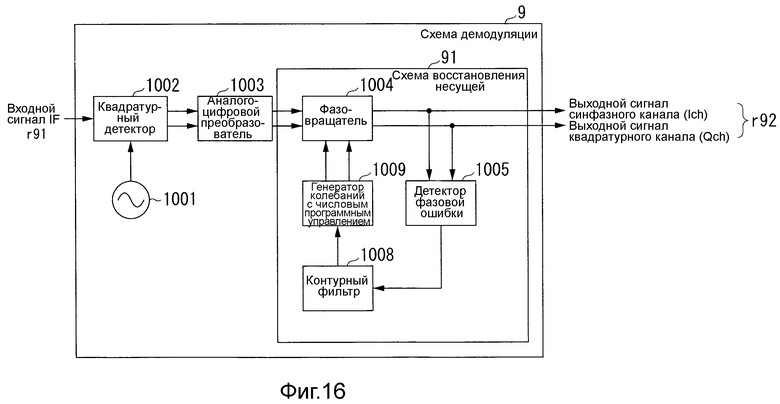
Фиг.16 является блок-схемой, на которой изображено устройство схемы 9 демодуляции, которая используется в приемнике цифровой системы радиосвязи.
Схема 9 демодуляции включает в себя генератор 1001 опорных колебаний, квадратурный детектор 1002, аналого-цифровой (A/D) преобразователь 1003 и схему 91 восстановления несущей. Схема 91 восстановления несущей включает в себя фазовращатель 1004, детектор 1005 фазовой ошибки, контурный фильтр 1008 и генератор 1009 колебаний с числовым программным управлением. Схема 91 восстановления несущей конфигурирует контур восстановления несущей, эквивалентный контуру фазовой автоподстройки (PLL).
Генератор 1001 опорных колебаний вырабатывает опорный сигнал с фиксированной частотой. Квадратурный детектор 1002 выполняет квадратурное детектирование на входном сигнале r91 IF (где IF обозначает промежуточную частоту) с использованием опорного сигнала генератора 1001 опорных колебаний, при этом вырабатывает сигнал основной полосы частот синфазного канала (Ich) и сигнал основной полосы частот квадратурного канала (Qch). Квадратурный детектор 1002 отправляет эти сигналы основной полосы частот в аналого-цифровой преобразователь 1003. Сигналы основной полосы частот квадратурного детектора 1002 могут содержать фазовые ошибки из-за разности фаз между промежуточной частотой (IF) и фиксированной частотой генератора 1001 опорных колебаний. Аналого-цифровой преобразователь 1003 выполняет аналого-цифровое преобразование на сигналах основной полосы частот квадратурного детектора 1002 и отправляет их в фазовращатель 1004.
Фазовращатель 1004 выполняет компенсацию фазовой ошибки посредством поворота фазы на цифровых сигналах основной полосы частот из аналого-цифрового преобразователя 1003, при этом вырабатывает выходные сигналы r92, связанные с синфазным каналом (Ich) и квадратурным каналом (Qch). Детектор 1005 фазовой ошибки обнаруживает фазовые ошибки, которые остаются в выходных сигналах r92 Ich/Qch, для выработки сигнала фазовой ошибки, представляющего величину напряжения, эквивалентную выявленным фазовым ошибкам. Контурный фильтр 1008 удаляет лишние высокочастотные компоненты, включенные в сигнал фазовой ошибки. Генератор 1009 колебаний с числовым программным управлением вырабатывает сигнал в форме синусоидальной волны и сигнал в форме косинусоидальной волны с инверсией фазы по отношению к фазе, указываемой сигналом фазовой ошибки, который прошел через контурный фильтр 1008, при этом отправляет их в фазовращатель 1004. Фазовращатель 1004 выполняет компенсацию фазовой ошибки на сигналах основной полосы частот на основе сигнала в форме синусоидальной волны и сигнала в форме косинусоидальной волны из генератора 1009 колебаний с числовым программным управлением.
Так как контурный фильтр 1008 удаляет лишние высокочастотные компоненты, включенные в сигнал фазовой ошибки детектора 1005 фазовой ошибки, то можно подавлять краткосрочные флуктуации сигнала в форме синусоидальной волны и сигнала в форме косинусоидальной волны генератора 1009 колебаний с числовым программным управлением посредством компенсации фазовой ошибки фазовращателя 1004. Соответственно, можно стабилизировать функционирование схемы 91 восстановления несущей посредством контура PLL. В этом документе контурный фильтр 1008 должен выбирать оптимальные значения ширины полосы пропускания, которые отличаются друг от друга в зависимости от величины фазовых ошибок, включенных в сигналы основной полосы частот квадратурного детектора 1002, и способов их модуляции. Поэтому предпочтительно регулировать ширину полосы пропускания контурного фильтра 1008 на основе величины фазовых ошибок и способа его модуляции.
Различные способы известны как способы регулирования ширины полосы пропускания контурного фильтра 1008. Например, в PLT 1 раскрыт цифровой передатчик/приемник спутникового вещания, в котором схема исправления ошибок измеряет вероятность ошибки на бит для установки схемой управления коэффициента контурного фильтра на основе решения относительно того, превышает ли вероятность ошибки на бит заданное пороговое значение. В PLT 2 раскрыта схема восстановления несущей QAM, в которой, после оценки фазового шума и аддитивного шума, пользователь может оптимизировать ширину полосы пропускания несущей волны контура на основе результата оценки. В PLT 3 раскрыто устройство восстановления несущей, которое вычисляет фазовые ошибки на основе координат точек сигнала (или точек созвездия) и координат демодулируемых сигналов в выравнивании точек сигнала (или созвездия) согласно QAM или PSK. В PLT 4 раскрыта схема восстановления несущей, которая определяет фазовую задержку или опережение по фазе в восстановлении несущей посредством разделения периферийной области, охватывающей точки созвездия в созвездии QAM, на четыре подраздела.
Список литературы
Патентная литература
PLT 1: Патентная публикация Японии № 2000-101666
PLT 2: Патентная публикация Японии № 2003-531523
PLT 3: Патентная публикация Японии № 2006-129536
PLT 4: Патентная публикация Японии № H03-34746
Раскрытие изобретения
Техническая проблема
В обычном приемнике, для контурного фильтра 1008 устанавливается ширина полосы пропускания контура, который определяется на основе наибольшей фазовой ошибки в предполагаемом диапазоне фазовых ошибок, независимо от величины фазовых ошибок, и способа его модуляции. Так как для контурного фильтра 1008 приемника с малыми фазовыми ошибками (т.е. приемника с хорошими характеристиками фазовой ошибки) устанавливается ширина полосы пропускания контура, которая определяется на основе наибольшей фазовой ошибки в предполагаемом диапазоне фазовых ошибок, то невозможно полностью отразить характеристики вероятности ошибки на бит, адаптированные к малым фазовым ошибкам.
В PLT 1 допускается установка ширины полосы пропускания контура на основе вероятности ошибки на бит, но ухудшается вероятность ошибки на бит из-за условий на маршрутах передачи между передатчиком и приемником с малыми фазовыми ошибками, это может привести к невозможности установки оптимальных значений ширины полосы пропускания контура. В PLT 2 пользователю обеспечивается возможность оптимизации ширины полосы пропускания контура, но нет возможности автоматически устанавливать ширину полосы пропускания контура. Кроме того, в PLT 2 не раскрыты детали способа оптимизации пользователем ширины полосы пропускания контура.
Решение проблемы
Настоящее изобретение выполнено с учетом вышеизложенных обстоятельств для обеспечения схемы восстановления несущей и схемы демодуляции на основе способа квазикогерентного детектирования с лучшими характеристиками вероятности ошибки на бит.
Настоящее изобретение относится к схеме восстановления несущей, адаптированной к схеме демодуляции согласно способу квазикогерентного детектирования. Эта схема восстановления несущей включает в себя фазовращатель, который поворачивает фазу сигнала основной полосы частот, детектируемого из принятого сигнала, детектор фазовой ошибки, который обнаруживает фазовую ошибку, включенную в сигнал основной полосы частот с повернутой фазой, детектор амплитудной ошибки, который обнаруживает амплитудную ошибку, включенную в сигнал основной полосы частот с повернутой фазой, контурный фильтр, который удаляет высокочастотный компонент из фазовой ошибки, контроллер контурного фильтра, который управляет шириной полосы пропускания контурного фильтра на основе фазовой ошибки и амплитудной ошибки, и контроллер поворота фазы (или генератор колебаний с числовым программным управлением), который управляет фазовращателем на основе фазовой ошибки с удалением ее высокочастотного компонента.
Контроллер контурного фильтра увеличивает ширину полосы пропускания контурного фильтра, когда разность между фазовой ошибкой и амплитудной ошибкой больше заданного порогового значения, в то время как контроллер контурного фильтра уменьшает ширину полосы пропускания контурного фильтра после определения того, что амплитудная ошибка уменьшается вследствие уменьшения ширины полосы пропускания контурного фильтра. Дополнительно контроллер контурного фильтра определяет то, что амплитудная ошибка уменьшается вследствие уменьшения ширины полосы пропускания контурного фильтра, когда разность между амплитудной ошибкой и минимальным значением предыдущих амплитудных ошибок больше заданного порогового значения.
Схема восстановления несущей также включает в себя: вторичный фазовращатель, который поворачивает фазу сигнала основной полосы частот, детектируемого из принятого сигнала, вторичный детектор фазовой ошибки, который обнаруживает фазовую ошибку, включенную в сигнал основной полосы частот, фаза которого повернута вторичным фазовращателем, вторичный детектор амплитудной ошибки, который обнаруживает амплитудную ошибку, включенную в сигнал основной полосы частот, фаза которого повернута вторичным фазовращателем, вторичный контурный фильтр, который удаляет высокочастотный компонент из фазовой ошибки, выявленной вторичным детектором фазовой ошибки, и вторичный контроллер поворота фазы, который управляет вторичным фазовращателем на основе фазовой ошибки, высокочастотный компонент которой удален вторичным контурным фильтром. Здесь контроллер контурного фильтра устанавливает разные значения ширины полосы пропускания для контурного фильтра и вторичных контурных фильтров так, что он увеличивает ширину полосы пропускания как контурного фильтра, так и вторичного контурного фильтра, когда разность между фазовой ошибкой детектора фазовой ошибки и амплитудной ошибкой детектора амплитудной ошибки больше заданного порогового значения. Дополнительно он определяет то, что амплитудная ошибка уменьшается из-за уменьшения ширины полосы пропускания контурного фильтра, когда разность между амплитудной ошибкой детектора амплитудной ошибки и амплитудной ошибкой вторичного детектора амплитудной ошибки больше заданного порогового значения, при этом уменьшает ширину полосы пропускания как контурного фильтра, так и вторичного контурного фильтра.
Схема демодуляции согласно настоящему изобретению включает в себя генератор опорных колебаний, который выполняет генерацию свободных колебаний на опорном сигнале с опорной частотой, квадратурный детектор, который демодулирует принятый сигнал, имеющий промежуточную частоту с опорным сигналом, для формирования сигналов основной полосы частот, фазы которых являются ортогональными друг к другу, аналого-цифровой преобразователь, который выполняет аналого-цифровое преобразование на сигналах основной полосы частот, и схему восстановления несущей. Схема восстановления несущей имеет вышеизложенное устройство и функцию.
Способ восстановления несущей настоящего изобретения включает в себя процесс поворота фазы для поворота фазы сигнала основной полосы частот, детектируемого из принятого сигнала, процесс обнаружения фазовой ошибки для обнаружения фазовой ошибки, включенной в сигнал основной полосы частот с повернутой фазой, процесс обнаружения амплитудной ошибки для обнаружения амплитудной ошибки, включенной в сигнал основной полосы частот с повернутой фазой, и процесс управления контурным фильтром для управления шириной полосы пропускания контурного фильтра на основе фазовой ошибки и амплитудной ошибки. Здесь он управляет поворотом фазы на основе фазовой ошибки, высокочастотный компонент которой удален контурным фильтром.
Полезные эффекты изобретения
Согласно настоящему изобретению, в цифровой системе радиосвязи можно улучшить характеристики вероятности ошибки на бит (BER) приемника. Кроме того, можно достичь обработки высококачественной демодуляции, так как можно выполнять восстановление несущей с отслеживанием вариаций отношения C/N.
Краткое описание чертежей
Фиг.1 - блок-схема, на которой изображено устройство схемы демодуляции согласно первому варианту осуществления настоящего изобретения.
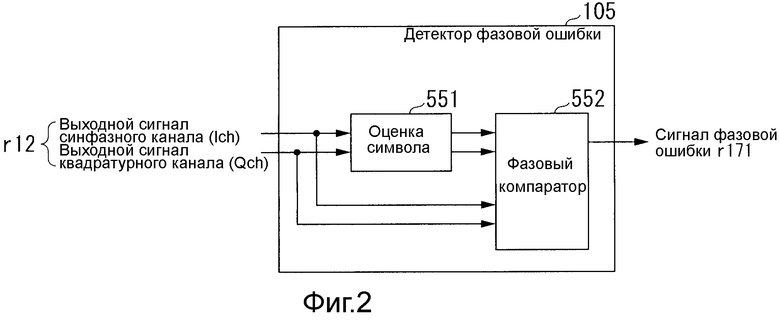
Фиг.2 - блок-схема, на которой изображено устройство детектора фазовой ошибки, который является составляющим элементом схемы демодуляции.
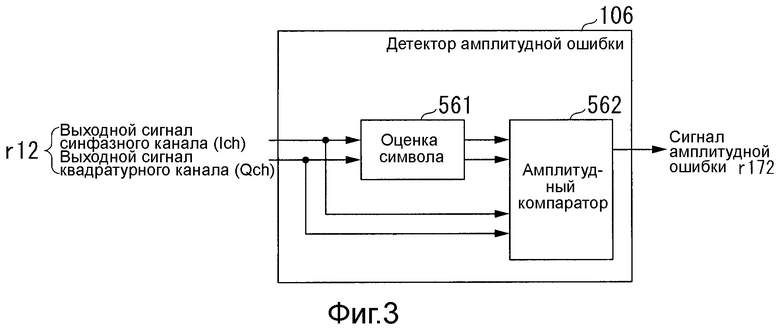
Фиг.3 - блок-схема, на которой изображено устройство детектора амплитудной ошибки, который является составляющим элементом схемы демодуляции.
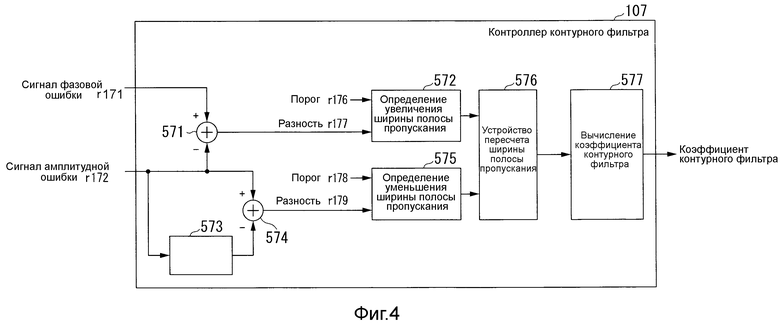
Фиг.4 - блок-схема, на которой изображено устройство контроллера контурного фильтра, который является составляющим элементом схемы демодуляции.
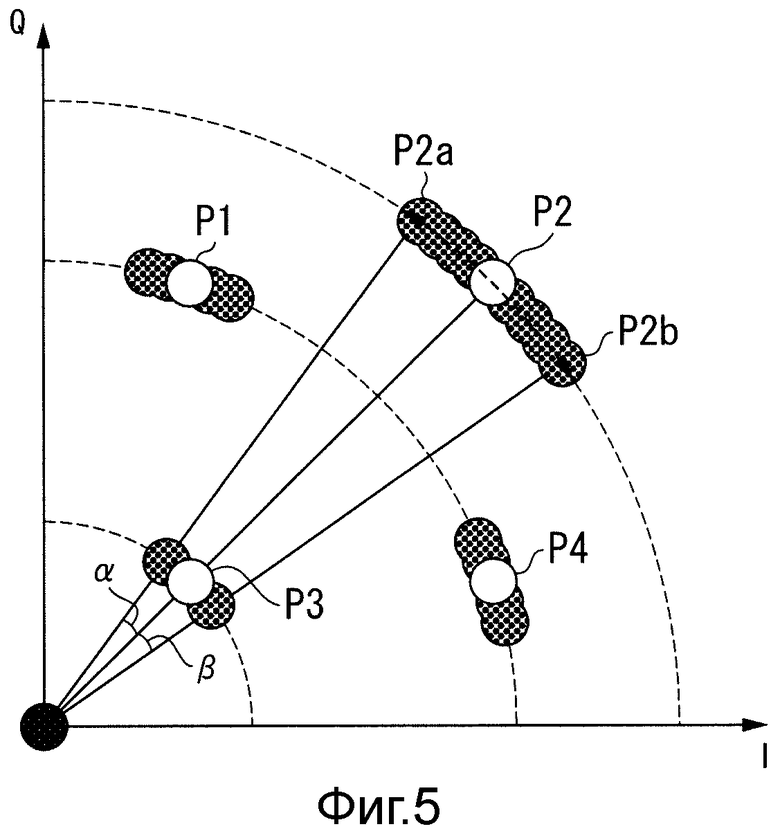
Фиг.5 - диаграмма, на которой изображена первая четверть периода созвездия 16 QAM с указанием сигналов, включающих в себя фазовые ошибки, на плоскости I-Q.
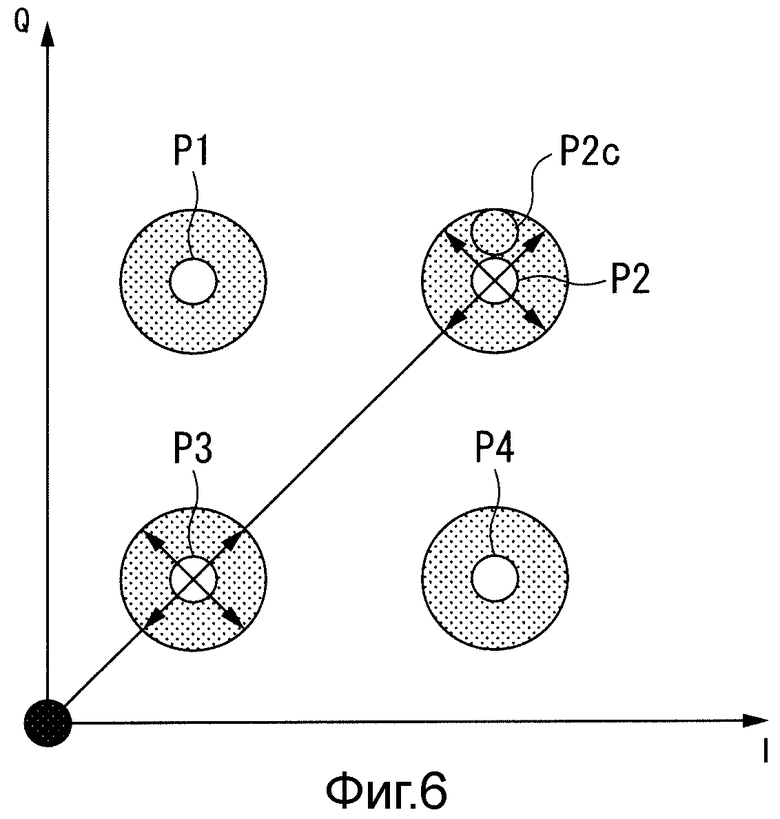
Фиг.6 - диаграмма, на которой изображена первая четверть периода созвездия 16 QAM с указанием сигналов, включающих в себя аддитивные ошибки, на плоскости I-Q.
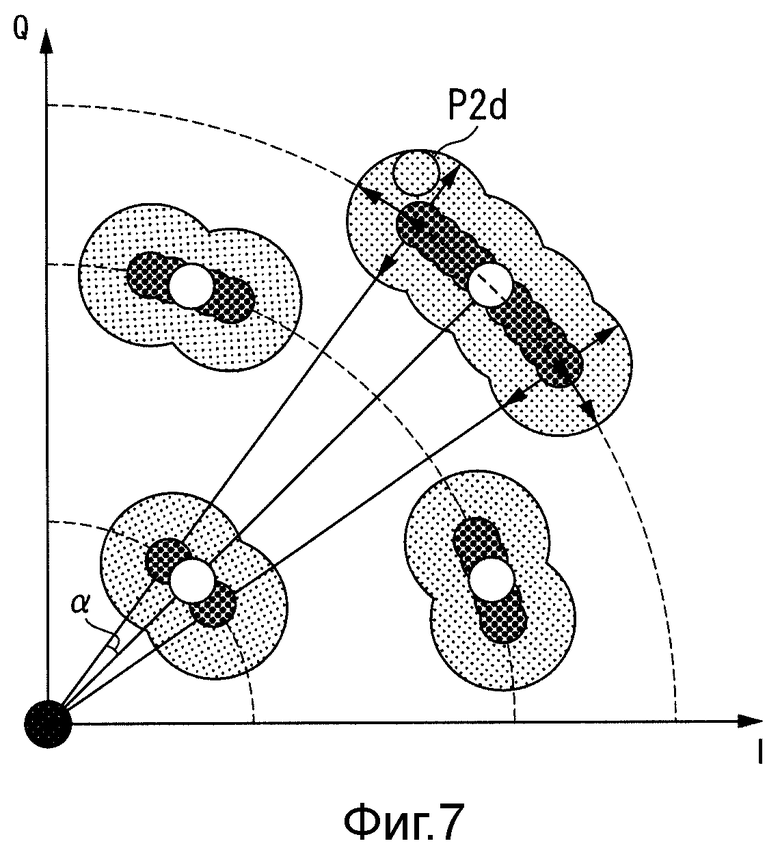
Фиг.7 - диаграмма, на которой изображена первая четверть периода созвездия 16 QAM с указанием сигналов, включающих в себя чисто фазовые ошибки и аддитивные ошибки, на плоскости I-Q.
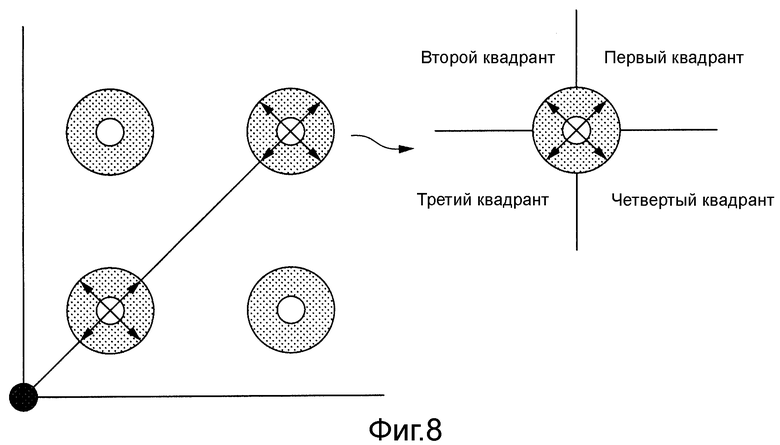
Фиг.8 - диаграмма, на которой изображена первая четверть периода созвездия 16 QAM с указанием того, что компоненты шума включены во все (четыре) четверти периода периферийных областей по отношению к точкам созвездия выходных сигналов Ich/Qch, которые включают в себя только аддитивный шум.
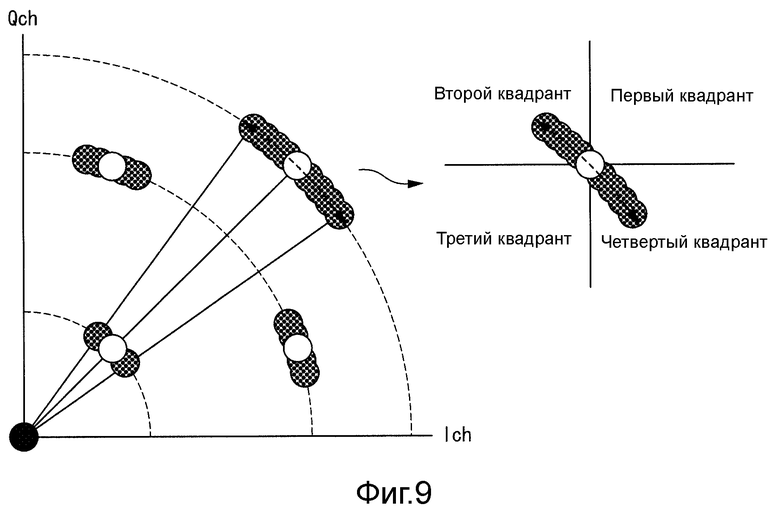
Фиг.9 - диаграмма, на которой изображена первая четверть периода созвездия 16 QAM с указанием того, что компоненты шума включены во вторую четверть периода периферийных областей по отношению к точкам созвездия выходных сигналов Ich/Qch, которые включают в себя только фазовые ошибки.
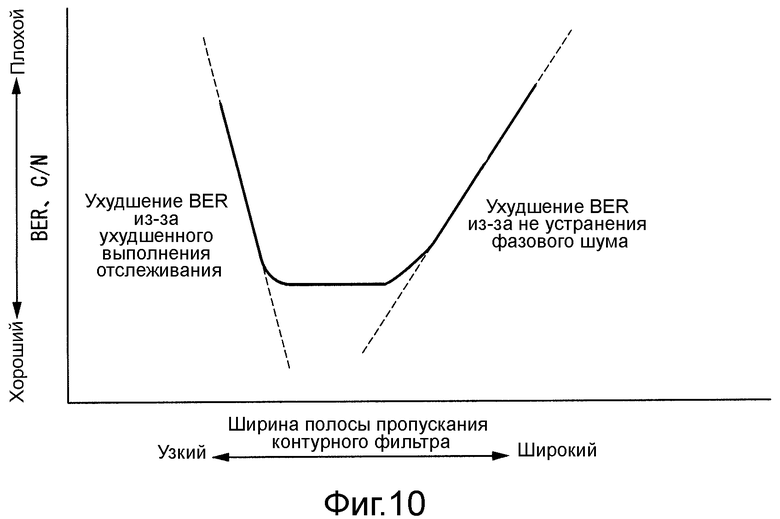
Фиг.10 - график, на котором изображена зависимость между шириной полосы пропускания и BER контурного фильтра, который является составляющим элементом схемы демодуляции, а также отношением C/N.
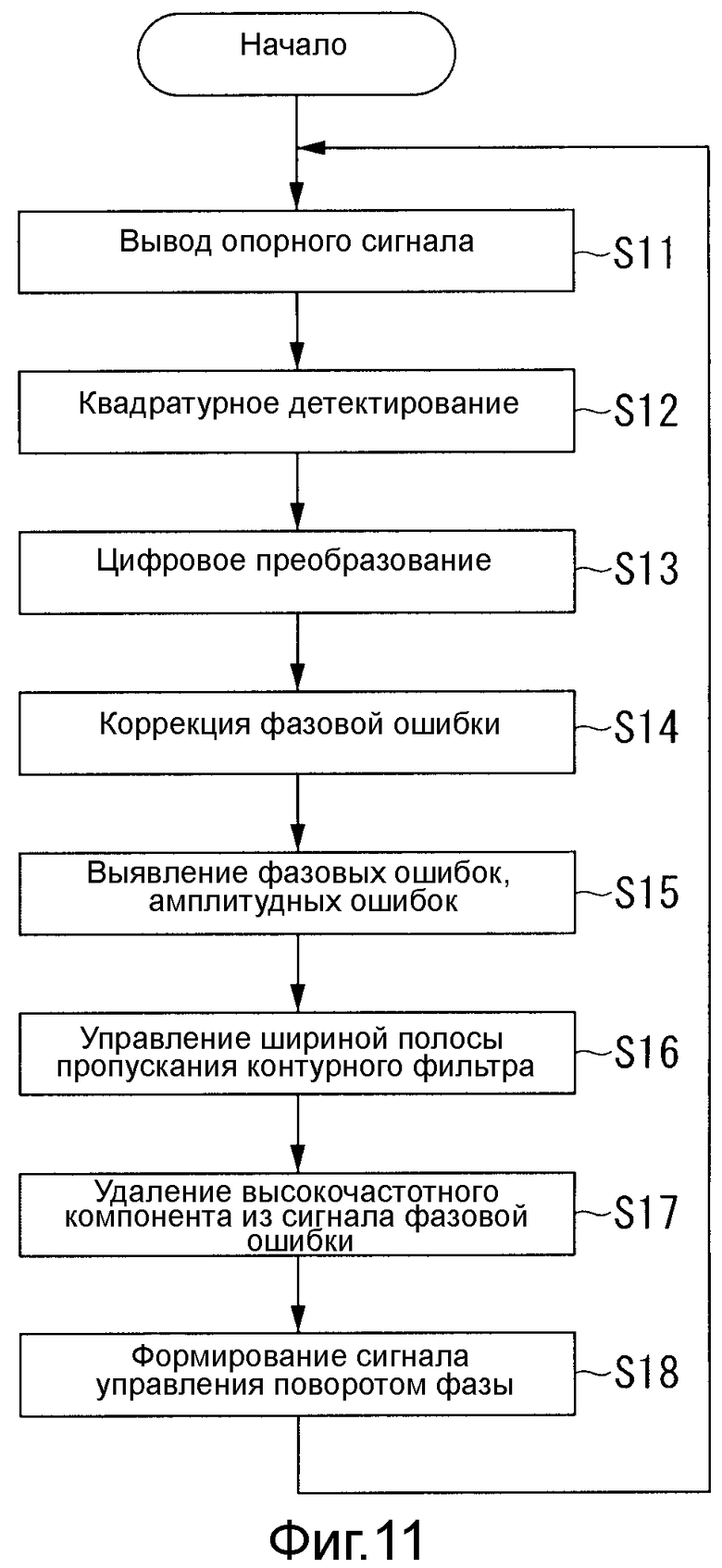
Фиг.11 - блок-схема, изображающая процесс демодуляции схемы демодуляции.
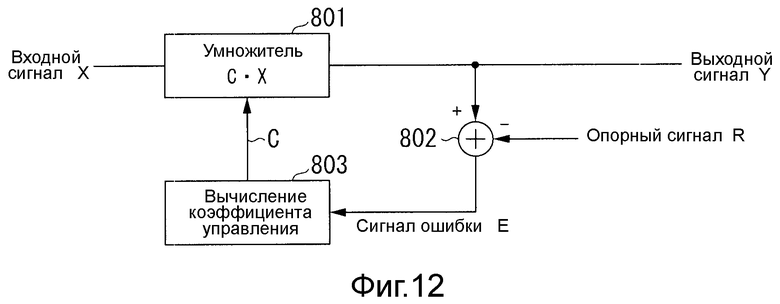
Фиг.12 - блок-схема, изображающая устройство схемы управления контуром, которая вычисляет индекс фазовой ошибки и индекс амплитудной ошибки.
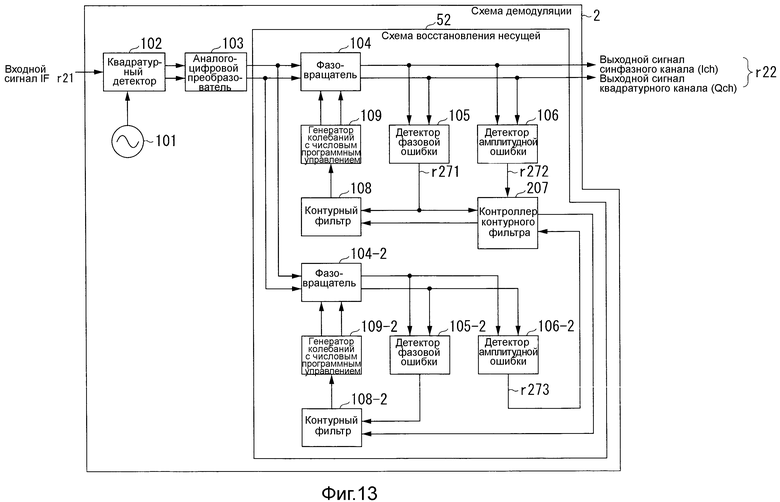
Фиг.13 - блок-схема, на которой изображено устройство схемы демодуляции согласно второму варианту осуществления настоящего изобретения.
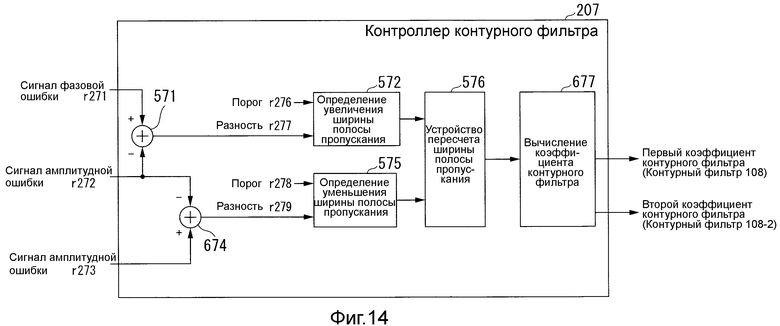
Фиг.14 - блок-схема, на которой изображено устройство контроллера контурного фильтра, который является составляющим элементом схемы демодуляции.
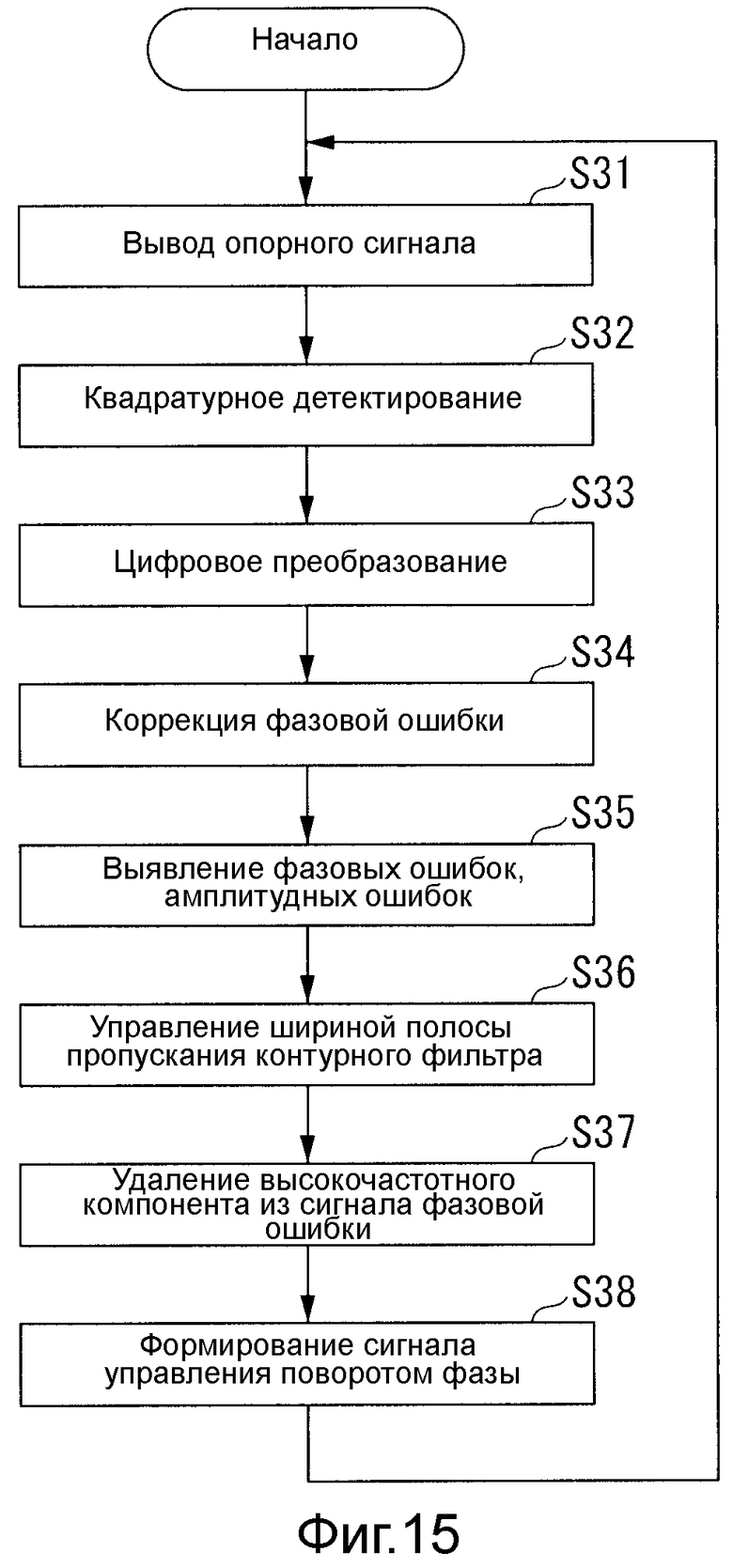
Фиг.15 - блок-схема, изображающая процесс демодуляции схемы демодуляции.
Фиг.16 - блок-схема, изображающая устройство обычной схемы демодуляции.
Осуществление изобретения
Настоящее изобретение описано посредством вариантов осуществления со ссылкой на сопровождающие чертежи. Настоящее изобретение относится к способу модуляции с использованием информации фазы для принятия решения, например, QAM и PSK. Каждый из вариантов осуществления ориентирован на схему демодуляции, которая выполняет квазикогерентное детектирование на входных сигналах промежуточной частоты (входные сигналы IF), для выработки сигналов основной полосы частот синфазного канала (Ich) и сигналов основной полосы частот квадратурного канала (Qch), причем схема восстановления несущей, которая содержит контурный фильтр, удаляет фазовые ошибки и амплитудные ошибки из сигналов основной полосы частот. Несмотря на то, что в вариантах осуществления выбрана 16 QAM, может быть выбран другой способ модуляции, посредством которого можно выполнить принятие решения на основе информации фазы. Способ квазикогерентного детектирования выполняет фазовое детектирование с использованием частотных сигналов с фиксированной частотой, которая вырабатывается схемой демодуляции, и нет необходимости вырабатывать сигналы, полностью синхронизированные с несущими волнами, поэтому способ квазикогерентного детектирования широко используется. Первый вариант осуществления выполнен на основе предположения о том, что отношение сигнал-шум на несущей частоте (C/N) принятого сигнала устанавливается в фиксированное значение, в то время как второй вариант осуществления имеет дело с переменными значениями C/N.
Первый вариант осуществления
Фиг.1 является блок-схемой, на которой изображено устройство схемы 1 демодуляции согласно первому варианту осуществления настоящего изобретения. Схема 1 демодуляции включает в себя генератор 101 опорных колебаний, квадратурный детектор 102, аналого-цифровой преобразователь 103 и схему 51 восстановления несущей. Схема 51 восстановления несущей включает в себя фазовращатель 104, детектор 105 фазовой ошибки, детектор 106 амплитудной ошибки, контроллер 107 контурного фильтра, контурный фильтр 108 и генератор 109 колебаний с числовым программным управлением (или контроллер поворота фазы). Схема 51 восстановления несущей конфигурирует контур восстановления несущей, эквивалентный контуру PLL.
Генератор 101 опорных колебаний выполняет генерацию свободных колебаний с опорной частотой колебаний (т.е. фиксированной частотой), близкой к частоте колебаний модулятора, для формирования частотного сигнала, имеющего упомянутую опорную частоту колебаний, который отправляют в квадратурный детектор 102. Квадратурный детектор 102 выполняет квадратурное детектирование с использованием частотного сигнала генератора 101 опорных колебаний на входном сигнале промежуточной частоты (входной сигнал IF), при этом вырабатывает сигнал основной полосы частот синфазного канала (Ich) и сигнал основной полосы частот квадратурного канала (Qch), которые являются взаимно ортогональными друг к другу. Так как опорная частота колебаний генератора 101 опорных колебаний немного отличается от частоты колебаний модулятора, то сигнал основной полосы частот Ich и сигнал основной полосы частот Qch могут включать в себя поворот фазы (или фазовую ошибку), эквивалентный разностной частоте между опорной частотой колебаний и промежуточной частотой (IF). Квадратурный детектор 102 отправляет сигнал основной полосы частот Ich и сигнал основной полосы частот Qch в аналого-цифровой преобразователь 103.
Аналого-цифровой преобразователь 103 выполняет аналого-цифровое преобразование на сигнале основной полосы частот Ich и сигнале основной полосы частот Qch, при этом отправляет их в фазовращатель 104 схемы 51 восстановления несущей. Схема (1) демодуляции выполняет свой процесс демодуляции посредством цифровой обработки сигналов схемы 51 восстановления несущей.
Фазовращатель 104 выполняет компенсацию фазовой ошибки на сигнале основной полосы частот Ich и сигнале основной полосы частот Qch в цифровых форматах на основе сигнала в форме синусоидальной волны и сигнала в форме косинусоидальной волны, вырабатываемых генератором 109 колебаний с числовым программным управлением, при этом вырабатывает выходной сигнал Ich и выходной сигнал Qch (которые являются сигналами основной полосы частот, уже подвергнутыми компенсации фазовой ошибки) (далее в этом документе, называемые выходными сигналами rl2). Выходные сигналы rl2, выработанные фазовращателем 104, подаются на внешнюю схему (не изображена), а также доставляются в детектор 105 фазовой ошибки и детектор 106 амплитудной ошибки.
Детектор 105 фазовой ошибки обнаруживает фазовые ошибки, включенные в выходные сигналы rl2 фазовращателя 104. Детектор 105 фазовой ошибки отправляет сигнал фазовой ошибки, представляющий величину напряжения, эквивалентную выявленным фазовым ошибкам, в контроллер 107 контурного фильтра и контурный фильтр 108. Детектор 106 амплитудной ошибки обнаруживает амплитудные ошибки, включенные в выходные сигналы rl2 фазовращателя 104. Детектор 106 амплитудной ошибки отправляет сигнал амплитудной ошибки, представляющий величину напряжения, эквивалентную выявленным фазовым ошибкам, в контроллер 107 контурного фильтра.
Контурный фильтр 108 удаляет лишние высокочастотные компоненты из сигнала фазовой ошибки детектора 105 фазовой ошибки, при этом отправляет этот результат в генератор 109 колебаний с числовым программным управлением. Генератор 109 колебаний с числовым программным управлением, включающий в себя генератор, управляемый напряжением (VCO), формирует сигнал в форме синусоидальной волны и сигнал в форме косинусоидальной волны с инверсной фазой (далее в этом документе называемыми сигналами управления поворотом фазы) на основе сигнала фазовой ошибки, в котором лишние высокочастотные компоненты удалены контурным фильтром 108. Генератор 109 колебаний с числовым программным управлением управляет поворотом фазы фазовращателя 104 на основе сигналов управления поворотом фазы. Контроллер 107 контурного фильтра управляет шириной полосы пропускания контурного фильтра на основе сигнала фазовой ошибки детектора 105 фазовой ошибки и сигнала амплитудной ошибки детектора 106 амплитудной ошибки.
Фиг.2 является блок-схемой, на которой изображено устройство детектора 105 фазовой ошибки. Детектор 105 фазовой ошибки включает в себя блок 551 оценки символа и фазовый компаратор 552. Блок 105 оценки символа выбирает точки созвездия, соответствующие выходным сигналам rl2, из созвездия на основе способа модуляции, применяемого между передатчиком и приемником, при этом отправляет их координаты в фазовый компаратор 552. Фазовый компаратор 552 сравнивает координаты входного сигнала rl1 IF с координатами точек созвездия, выбранных блоком 551 оценки символа, для вычисления фазовых ошибок входного сигнала rl1 IF, при этом пересылает сигнал rl71 фазовой ошибки.
Фиг.3 является блок-схемой, на которой изображено устройство детектора 106 фазовой ошибки. Детектор 106 фазовой ошибки включает в себя блок 561 оценки символа и амплитудный компаратор 562. Аналогично блоку 551 оценки символа по фиг.2, блок 561 оценки символа выбирает точки созвездия, соответствующие выходным сигналам rl2, из созвездия на основе способа модуляции, применяемого между передатчиком и приемником, при этом отправляет их координаты в амплитудный компаратор 562. Амплитудный компаратор 562 сравнивает координаты входного сигнала rl1 IF с координатами точек сигнала, выбранных блоком 561 оценки символа, для вычисления амплитудных ошибок входного сигнала rl1 IF, при этом пересылает сигнал rl72 амплитудной ошибки.
Фиг.4 является блок-схемой, на которой изображено устройство контроллера 107 контурного фильтра. Контроллер 107 контурного фильтра включает в себя блок 573 сохранения минимального значения, вычитающие устройства 571, 574, (блок 572 определения расширения диапазона амплитуд), (блок 575 определения сокращения диапазона амплитуд), устройство 576 пересчета ширины полосы пропускания и блок 577 вычисления коэффициента контурного фильтра. Блок 573 сохранения минимального значения сохраняет минимальное значение сигнала rl72 амплитудной ошибки из детектора 106 амплитудной ошибки. Кроме того, блок 573 сохранения минимального значения может произвольно пересылать минимальное значение сигнала r172 амплитудной ошибки для вычитания 574. Вычитающее устройство 571 вычитает сигнал rl72 амплитудной ошибки из сигнала rl71 фазовой ошибки, при этом отправляет разность rl77 между ними в блок 572 определения увеличения ширины полосы пропускания. Вычитающее устройство 574 вычитает минимальное значение сигнала rl72 амплитудной ошибки из сигнала rl72 амплитудной ошибки, при этом отправляет разность rl79 между ними в блок 575 определения уменьшения ширины полосы пропускания.
Блок 572 определения уменьшения ширины полосы пропускания сравнивает разность rl77 вычитающего устройства 571 с предварительно сохраненным порогом rl76 для определения того, следует ли увеличивать ширину полосы пропускания контурного фильтра 108. После определения увеличения ширины полосы пропускания контурного фильтра 108 блок 572 определения увеличения ширины полосы пропускания отправляет сигнал с объявлением увеличения ширины полосы пропускания контурного фильтра 108 (т.е. сигнал увеличения ширины полосы пропускания) в устройство 576 пересчета ширины полосы пропускания.
Блок 575 определения уменьшения ширины полосы пропускания сравнивает разность rl79 вычитающего устройства 574 с предварительно сохраненным порогом rl78 для определения того, следует ли уменьшать ширину полосы пропускания контурного фильтра 108. После определения уменьшения ширины полосы пропускания контурного фильтра 108 блок 575 определения уменьшения ширины полосы пропускания отправляет сигнал с объявлением уменьшения ширины полосы пропускания контурного фильтра 108 (т.е. сигнал уменьшения ширины полосы пропускания) в устройство 576 пересчета ширины полосы пропускания.
Устройство 576 пересчета ширины полосы пропускания вырабатывает значение вычисления, представляющее ширину полосы пропускания контурного фильтра 108, в ответ на сигнал увеличения ширины полосы пропускания или сигнал уменьшения ширины полосы пропускания. Блок 577 вычисления коэффициента контурного фильтра вырабатывает и пересылает коэффициент контурного фильтра, определяющий ширину полосы пропускания контурного фильтра 108, на основе значения вычисления устройства 576 пересчета ширины полосы пропускания.
Ниже более подробно описаны фазовые ошибки (фазовый шум), аддитивные ошибки (аддитивный шум) и амплитудные ошибки (амплитудный шум).
Фиг.5 является диаграммой, на которой нанесены сигналы, включающие в себя фазовые ошибки, на плоскости I-Q (т.е. плоскость координат, на которой горизонтальная ось представляет Ich, а вертикальная ось представляет Qch). На ней изображена первая четверть периода созвездия 16 QAM. P1-P4 обозначают точки созвездия 16 QAM, а P2a и P2b обозначают сигналы, соответствующие фазовым ошибкам, включенным в точку P2 созвездия. Точка P2a созвездия опережает по фазе точку P2 созвездия на угол α, а точка P2b созвездия запаздывает по фазе относительно точки созвездия P2 на угол β. Соответственно, фазовая ошибка распознается как угол отклонения от заданной позиции в отношении точки созвездия относительно исходного сигнала, следовательно, фазовая ошибка происходит из-за девиации между несущей частотой и частотой колебаний на стороне модуляции и/или на стороне демодуляции. В схеме 1 демодуляции, фазовая ошибка происходит из-за девиации между входным сигналом rll IF и опорной частотой генератора 101 опорных колебаний. Кроме того, аддитивные ошибки могут включать в себя фазовые ошибки. Нижеследующее описание относится к «чисто фазовым ошибкам» как фазовым ошибкам, которые происходят из-за девиаций между несущей частотой и частотой колебаний, причем чисто фазовые ошибки не связаны с амплитудными ошибками.
Фиг.6 является диаграммой, на которой нанесены сигналы, включающие в себя аддитивные ошибки, на плоскости I-Q. Аналогично фиг.5, на фиг.6 изображена первая четверть периода созвездия 16 QAM. Здесь P1-P4 обозначают точки созвездия 16 QAM, причем P2c обозначает аддитивную ошибку, включенную в точку P2 созвездия. Аддитивные ошибки являются ненаправленными ошибками, например, тепловые помехи, следовательно, аддитивные ошибки могут включать в себя как фазовые ошибки, так и амплитудные ошибки.
Фиг.7 является диаграммой, на которой нанесены сигналы, включающие в себя чисто фазовые ошибки и аддитивные ошибки, на плоскости I-Q. Аналогично фиг.5, на фиг.7 изображена первая четверть периода созвездия 16 QAM. Здесь P1-P4 обозначают точки созвездия 16 QAM, причем P2d указывает как фазовые ошибки, так и аддитивные ошибки, включенные в точку P2 созвездия. Из-за чисто фазовых ошибок, точка P2d созвездия опережает по фазе точку P2 созвездия на угол α, а также подвергается фазовым/амплитудным отклонениям из-за аддитивных ошибок. Соответственно, когда позиция точки созвездия сдвигается из-за чисто фазовых ошибок и аддитивных ошибок, амплитудные отклонения могут происходить из-за аддитивных ошибок, а фазовые ошибки могут происходить как из-за чисто фазовых ошибок, так и из-за аддитивных ошибок. Как изображено на Фиг.6, отклонения фазы могут соответствовать отклонениям амплитуды, когда остаются только аддитивные ошибки, независимо от устранения чисто фазовых ошибок. Для удаления фазовых ошибок, необходимо увеличить ширину полосы пропускания контурного фильтра 108, но увеличение ширины полосы пропускания контурного фильтра 108 может ухудшить отношение C/N из-за включения шума, который имеет место в детекторе 105 фазовой ошибки. Для удаления аддитивного шума, который имеет место в детекторе 105 фазовой ошибки, необходимо уменьшить ширину полосы пропускания контурного фильтра 108, при этом минимизируются амплитудные ошибки. Соответственно, необходимо оптимизировать ширину полосы пропускания контурного фильтра 108 посредством расширения/сокращения.
Фиг.8 является диаграммой, на которой периферийная область каждой точки созвездия разбита на четыре квадранта с указанием на то, что компоненты шума включены во все квадранты по отношению к каждой из точек созвездия, соответствующих выходным сигналам rl2 Ich/Qch, включающим в себя только аддитивный шум. Соответственно, посредством статистического наблюдения после установки локальных координат, параллельных плоскости I-Q, вокруг начала координат, соответствующего каждой точке созвездия, как изображено на Фиг.8, можно наблюдать, что компоненты шума включены в то же отношение во всех квадрантах по отношению к выходным сигналам rl2 Ich/Qch, включающим в себя только аддитивный шум. Здесь каждый из компонентов шума относится к расстоянию между опорной точкой созвездия и выходным сигналом rl2 Ich/Qch на плоскости I-Q.
Фиг.9 является диаграммой, на которой периферийная область каждой точки созвездия разбита на четыре квадранта с указанием на то, что компоненты шума включены во второй и четвертый квадранты из четырех квадрантов, окружающих каждую из точек созвездия, соответствующих выходным сигналам rl2 Ich/Qch, включающим в себя только фазовые ошибки. Соответственно, компоненты шума имеют место во втором и четвертом квадрантах в периферийной области, окружающей каждую из точек созвездия, соответствующих выходным сигналам rl2 Ich/Qch, включающим в себя только чисто фазовые ошибки. Следовательно, компоненты шума увеличиваются во втором и четвертом квадрантах в периферийной области, окружающей каждую из точек созвездия, соответствующих выходным сигналам rl2 Ich/Qch, включающим в себя чисто фазовые ошибки, и выходным сигналам rl2 Ich/Qch, включающим в себя чисто фазовые ошибки и аддитивные ошибки. Другими словами, можно определять то, включают ли в себя выходные сигналы Ich/Qch rl2 чисто фазовые ошибки, или они включают в себя как чисто фазовые ошибки, так и аддитивные ошибки, посредством сравнения компонентов шума в квадрантах периферийной области, окружающей каждую из точек созвездия, соответствующих выходным сигналам rl2 Ich/Qch. С учетом результата этого анализа, детектор 105 амплитудной ошибки обнаруживает амплитудные ошибки как расстояния между точками созвездия в первом и третьем квадрантах, связанных с периферийной областью, окружающей каждую точку созвездия, и началом координат на плоскости I-Q.
Фиг.10 является графиком, на котором изображена зависимость между шириной полосы пропускания контурного фильтра 108, вероятностью ошибки на бит (BER) и отношением C/N. В связи с этим зависимость между шириной полосы пропускания контурного фильтра 108, BER, и отношением C/N согласно настоящему варианту осуществления является аналогичной зависимости, которая установлена в отношении обычного контурного фильтра.
Как изображено на фиг.10, небольшая ширина полосы пропускания контурного фильтра 108 уменьшает скорость реагирования, следовательно контур восстановления несущей может не полностью отслеживать вариации фазы, при этом ухудшается отношение C/N. Например, когда имеет место состояние отсутствия синхронизации PLL из-за флуктуаций опорной частоты генератора 101 опорных колебаний, вызванных вариациями температуры, контурный фильтр 108 с небольшой шириной полосы пропускания может замедлять вариации своего выходного напряжения, причем восстановление состояния синхронизации PLL занимает много времени. С другой стороны, контурный фильтр 108 с большой шириной полосы пропускания может ухудшить отношение C/N, так как невозможно удалять лишние высокочастотные компоненты, включенные в сигнал фазовой ошибки, вырабатываемый детектором 105 фазовой ошибки. Соответственно, контурный фильтр 108 с очень малой шириной полосы пропускания или очень большой шириной полосы пропускания может ухудшать отношение C/N. В общем, контурный фильтр с большой шириной полосы пропускания демонстрирует хорошее выполнение отслеживания несущих волн, следовательно, предпочтительно регулировать ширину полосы пропускания в пределах определенного диапазона, не вызывающего ухудшение отношения C/N. Кроме того, отношение C/N связано с аддитивным шумом, который, в свою очередь, вызывает амплитудные ошибки в дополнение к фазовым ошибкам. Соответственно, можно определять то, ухудшается ли отношение C/N, на основе амплитудных ошибок.
Ниже описывается обработка демодуляции схемы 1 демодуляции со ссылкой на блок-схему по фиг.11.
На этапе S11, генератор 101 опорных колебаний выполняет генерацию свободных колебаний с опорной частотой для формирования опорного сигнала и отправки его в квадратурный детектор 102.
На этапе S12, квадратурный детектор 102 демодулирует входной сигнал rl1 IF, который подается на схему 1 демодуляции, с опорным сигналом для формирования сигнала основной полосы частот Ich и сигнала основной полосы частот Qch, фазы которых являются ортогональными друг к другу, при этом отправляет их в аналого-цифровой преобразователь 103.
На этапе S13, аналого-цифровой преобразователь 103 выполняет аналого-цифровое преобразование на сигнале основной полосы частот Ich и сигнале основной полосы частот Qch, вырабатываемых квадратурным детектором 102, при этом отправляет их в фазовращатель 104.
На этапе S14, фазовращатель 104 выполняет коррекцию фазовой ошибки посредством поворота фазы, осуществляемого на сигнале основной полосы частот Ich и сигнале основной полосы частот Qch, которые уже подвергнуты аналого-цифровому преобразованию. Фазовращатель 104 пересылает сигналы основной полосы частот Ich/Qch со скорректированной фазовой ошибкой как выходные сигналы rl2 Ich/Qch во внешнюю схему с отправкой их в детектор 105 фазовой ошибки и детектор 106 амплитудной ошибки.
На этапе S15, детектор 105 фазовой ошибки обнаруживает фазовые ошибки, которые остаются в выходных сигналах Ich/Qch rl2 из фазовращателя 104. В частности, блок 551 оценки символа детектора 105 фазовой ошибки вычисляет минимальные квадратичные ошибки между координатами выходных сигналов rl2 Ich/Qch и координатами каждой из точек созвездия на плоскости I-Q, при этом выбирает точки созвездия с самой маленькой минимальной квадратичной ошибкой. Блок 551 оценки символа пересылает координаты выбранной точки созвездия на плоскости I-Q в фазовый компаратор 552.
Фазовый компаратор 552 вычитает координаты точки созвездия, выбранной блоком 551 оценки символа, из координат выходных сигналов rl2 Ich/Qch, при этом вырабатывает векторы шума. Когда вектор шума включает в себя положительный компонент Ich и отрицательный компонент Qch (т.е. в случае четвертого квадранта на фиг.9), или когда вектор шума включает в себя отрицательный компонент Ich и положительный компонент Qch (т.е. в случае второго квадранта на фиг.9), фазовый компаратор 552 вычисляет длину вектора шума (т.е. расстояние между выбранной точкой созвездия и выходным сигналом Ich/Qch) как фазовую ошибку, которую отправляют в контроллер 107 контурного фильтра. Кроме того, фазовый компаратор 552 делит длину вектора шума на величину амплитуды для приблизительного вычисления угла фазовой ошибки, который отправляют в контурный фильтр 108. Здесь он вырабатывает положительный угол в случае опережения по фазе (т.е. в случае второго квадранта на фиг.9) или отрицательный угол в случае фазовой задержки (т.е. в случае четвертого квадранта на фиг.9). Когда вектор шума включает в себя компонент Ich и компонент Qch, оба из которых являются положительными (т.е. в случае первой четверти периода на фиг.9), или когда вектор шума включает в себя компонент Ich и компонент Qch, оба из которых являются отрицательными (т.е. в случае третьей четверти периода на фиг.9), фазовый компаратор 552 не вырабатывает сигнал rl71 фазовой ошибки.
На этапе S15 детектор 106 амплитудной ошибки обнаруживает амплитудные ошибки, включенные в выходные сигналы rl2 Ich/Qch фазовращателя 104. В частности, аналогично блоку 551 оценки символа детектора 105 фазовой ошибки, блок 561 оценки символа детектора 106 амплитудной ошибки выбирает точку созвездия для отправки ее координат в амплитудный компаратор 562. Амплитудный компаратор 562 вычитает координаты точки созвездия, выбранной блоком 561 оценки символа, из координат выходных сигналов rl2 Ich/Qch, при этом вырабатывает векторы шума. Когда вектор шума включает в себя компонент Ich и компонент Qch, оба из которых являются положительными (т.е. в случае первого квадранта на фиг.9), или когда вектор шума включает в себя компонент Ich и компонент Qch, оба из которых являются отрицательными (т.е. в случае третьего квадранта на фиг.9), амплитудный компаратор 562 вычисляет длину вектора шума как амплитудную ошибку, которую отправляют в контроллер 107 контурного фильтра. С другой стороны, когда вектор шума включает в себя положительный компонент Ich и отрицательный компонент Qch (т.е. в случае четвертого квадранта на фиг.9), или когда вектор шума включает в себя отрицательный компонент Ich и положительный компонент Qch (т.е. в случае второго квадранта на фиг.9), амплитудный компаратор 562 не вырабатывает сигнал rl72 амплитудной ошибки.
На этапе S16 контроллер 107 контурного фильтра формирует коэффициент контурного фильтра, указывающий ширину полосы пропускания контурного фильтра 108, на основе сигнала rl71 фазовой ошибки и сигнала rl72 амплитудной ошибки, при этом управляет шириной полосы пропускания контурного фильтра 108. В контроллере 107 контурного фильтра вычитающее устройство 571 вычитает сигнал rl72 амплитудной ошибки из сигнала rl71 фазовой ошибки для вычисления разности rl77 между ними, которую отправляют в блок 572 определения увеличения ширины полосы пропускания. Когда разность rl77 больше заданного порогового значения rl76, блок 572 определения увеличения ширины полосы пропускания отправляет сигнал увеличения ширины полосы пропускания с указанием увеличения ширины полосы пропускания контурного фильтра 108 в устройство 576 пересчета ширины полосы пропускания. Напротив, блок 572 определения увеличения ширины полосы пропускания не вырабатывает сигнал увеличения ширины полосы пропускания, когда разность rl77 меньше или равна порогу rl76.
В контроллере 107 контурного фильтра блок 573 сохранения минимального значения сохраняет минимальное значение амплитудных ошибок, указанное сигналом rl72 амплитудной ошибки. В частности, блок 573 сохранения минимального значения сравнивает сигнал rl72 амплитудной ошибки с предварительно сохраненным минимальным значением для установки предварительно сохраненного минимального значения как минимального значения сигнала rl72 амплитудной ошибки, когда сигнал rl72 амплитудной ошибки меньше предварительно сохраненного минимального значения. Блок 573 сохранения минимального значения произвольно отправляет свое минимальное значение в вычитающее устройство 574. Вычитающее устройство 574 отправляет разность rl79, которая вырабатывается посредством вычитания упомянутого минимального значения из сигнала rl72 амплитудной ошибки, в блок 575 определения уменьшения ширины полосы пропускания. Блок 575 определения уменьшения ширины полосы пропускания сравнивает разность rl79 с заданным пороговым значением rl78. Когда разность rl79 больше порога rl78, предполагается, что с уменьшением ширины полосы пропускания контурного фильтра 108 минимизируются амплитудные ошибки (т.е. улучшается отношение C/N на фиг.10). С учетом того факта, что амплитудные ошибки уменьшаются из-за уменьшения ширины полосы пропускания контурного фильтра 108, блок 575 определения уменьшения ширины полосы пропускания отправляет сигнал уменьшения ширины полосы пропускания в устройство 576 пересчета ширины полосы пропускания. Напротив, блок 575 определения уменьшения ширины полосы пропускания не вырабатывает сигнал уменьшения ширины полосы пропускания, когда разность rl79 меньше или равна порогу rl78.
Устройство 576 пересчета ширины полосы пропускания сохраняет у себя значение вычисления, представляющее ширину полосы пропускания контурного фильтра 108, чтобы изменять его на основе сигнала увеличения ширины полосы пропускания или сигнала уменьшения ширины полосы пропускания, при этом изменяется ширина полосы пропускания контурного фильтра 108. В частности, устройство 576 пересчета ширины полосы пропускания увеличивает свое значение вычисления в ответ на сигнал увеличения ширины полосы пропускания, вырабатываемый блоком 572 определения увеличения ширины полосы пропускания. В качестве альтернативы, устройство 576 пересчета ширины полосы пропускания уменьшает свое значение вычисления в ответ на сигнал уменьшения ширины полосы пропускания, вырабатываемый блоком 575 определения уменьшения ширины полосы пропускания. Устройство 576 пересчета ширины полосы пропускания отправляет увеличенное или уменьшенное значение вычисления в блок 577 вычисления коэффициента контурного фильтра.
При одновременном приеме сигнала увеличения ширины полосы пропускания и сигнала уменьшения ширины полосы пропускания, устройство 576 пересчета ширины полосы пропускания выполняет процесс на основе заданного приоритетного порядка для предотвращения состояния взаимной блокировки из-за конфликта между командами на увеличение и уменьшение значения вычисления. В связи с этим, можно сначала исполнять процесс увеличения ширины полосы пропускания или процесс уменьшения ширины полосы пропускания.
Блок 577 вычисления коэффициента контурного фильтра определяет коэффициент контурного фильтра для контурного фильтра 108 на основе значения вычисления устройства 576 пересчета ширины полосы пропускания. Например, блок 577 вычисления коэффициента контурного фильтра может заранее сохранять функцию для преобразования значения вычисления в коэффициент контурного фильтра, при этом коэффициент контурного фильтра вычисляется на основе этой функции. В качестве альтернативы, блок 577 вычисления коэффициента контурного фильтра может заранее сохранять таблицу преобразования, при этом коэффициент контурного фильтра определяется на основании этой таблицы преобразования. Блок 577 вычисления коэффициента контурного фильтра отправляет свой коэффициент контурного фильтра в контурный фильтр 108.
Так как детектор 105 фазовой ошибки по фиг.2 или детектор 106 амплитудной ошибки по фиг.3 отправляют сигнал r171 фазовой ошибки или сигнал r172 амплитудной ошибки в контроллер 107 контурного фильтра, то вычитающее устройство 571 не может должным образом вычислять разность rl77 между ними. Поэтому контроллер 107 контурного фильтра должен сохранять среднее значение сигналов r171 фазовой ошибки, которые были приняты раньше, и среднее значение сигналов rl72 амплитудной ошибки, которые были приняты раньше. Соответственно, вычитающее устройство 571 может вычислять разность rl77 между сигналом rl71 фазовой ошибки и сигналом rl72 амплитудной ошибки. В качестве альтернативы, контроллер 107 контурного фильтра может сохранять ранее принятый сигнал (rl81) фазовой ошибки и ранее принятый сигнал rl72 амплитудной ошибки для возможности использования упомянутого ранее принятого сигнала rl71 фазовой ошибки или упомянутого ранее принятого сигнала rl72 амплитудной ошибки, когда он в настоящее время не может принять сигнал rl71 фазовой ошибки или сигнал rl72 амплитудной ошибки.
На этапе S17 для контурного фильтра 108 устанавливается ширина полосы пропускания, соответствующая коэффициенту контурного фильтра контроллера 107 контурного фильтра, для удаления контурным фильтром 108 лишних высокочастотных компонентов из сигнала фазовой ошибки. Контурный фильтр 108 отправляет сигнал фазовой ошибки, из которого удалены лишние высокочастотные компоненты, в генератор 109 колебаний с числовым программным управлением.
На этапе S18 генератор 109 колебаний с числовым программным управлением формирует сигнал в форме синусоидальной волны и сигнал в форме косинусоидальной волны с инверсной фазой на основе сигнала фазовой ошибки из контурного фильтра 108, при этом отправляет их в фазовращатель 104. Фазовращатель 104 выполняет поворот фазы (см. этап S14) на основе сигнала в форме синусоидальной волны и сигнала в форме косинусоидальной волны с инверсной фазой. Схема 1 демодуляции непрерывно исполняет вышеизложенную обработку демодуляции на входных сигналах IF.
В связи с этим, детектор 105 фазовой ошибки и детектор 106 амплитудной ошибки могут вычислять индекс фазовой ошибки и индекс амплитудной ошибки в соответствии с произвольными способами, отличными от вышеизложенных способов.
Фиг.12 является блок-схемой, на которой изображено устройство схемы управления контуром, которая вычисляет индекс фазовой ошибки и индекс амплитудной ошибки. Схема управления контуром включает в себя умножитель 801, вычитающее устройство 802 и блок 803 вычисления эффективности управления, причем она умножает входной сигнал X на коэффициент управления С для обеспечения выходного сигнала Y, который соответствует опорному сигналу R.
А именно, умножитель 801 умножает входной сигнал X на коэффициент управления С для выработки выходного сигнала Y, который подается на вычитающее устройство 801 и внешнюю схему (не изображена). Вычитающее устройство 802 вычитает опорный сигнал R из выходного сигнала Y для выработки сигнала E ошибки, который отправляют в блок 803 вычисления коэффициента управления. Блок 803 вычисления коэффициента управления вычисляет коэффициент управления С на основе сигнала E ошибки, вырабатываемого вычитающим устройством 802, при этом отправляет его в умножитель 801. Здесь сигнал E ошибки выражен Уравнением 1.
[Уравнение 1]
E=Y-R=CX-R
С решением Уравнения 1 относительно коэффициента управления C можно вычислять фазовую управляющую информацию и амплитудную управляющую информацию, которая может использоваться как сигнал rl71 фазовой ошибки и сигнал rl72 амплитудной ошибки. Коэффициент управления С вычисляется с использованием Уравнения 2 с дифференцированием комплексной функции E ошибок.
[Уравнение 2]
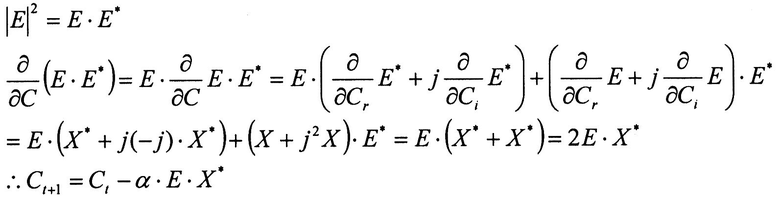
Здесь Е* обозначает комплексно сопряженную величину Е, Cr, Ci обозначают вещественный член и мнимый член функции C, t обозначает время, и j обозначает мнимую единицу. Кроме того, α обозначает постоянный член. Согласно Уравнению 2, С выражается Уравнением 3.
[Уравнение 3]
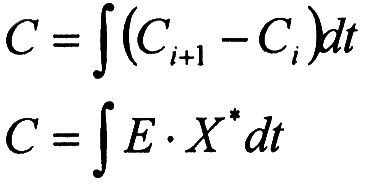
С другой стороны, комплексное число С может быть выражено в полярных координатах согласно Уравнению 4.
[Уравнение 4]

Здесь r выражается Уравнением 5, когда θ достаточно мало (т.е. когда разность фаз между выходным сигналом Y и опорным сигналом R является малой величиной).
[Уравнение 5]
Кроме того, θ может быть выражено Уравнением 6, когда r приблизительно равно «1» (т.е. когда разность амплитуд между выходным сигналом Y и опорным сигналом R является малой величиной).
[Уравнение 6]
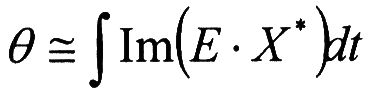
В отношении коэффициента управления C, компонент амплитуды r может быть вычислен с использованием Уравнения 5, а компонент фазы θ может быть вычислен с использованием Уравнения 6. Здесь, с предположением того, что R=X (т.е. когда шум, включенный во входной сигнал X, является малой величиной), фазовая управляющая информация θ может быть выражена Уравнением 7 при условии, что R=Di+jDq (где Di обозначает вещественную часть, а Dq обозначает мнимую часть в опорном сигнале R), и E=Ei+jEq (где Ei обозначает вещественную часть, а Eq обозначает мнимую часть в сигнале E ошибки).
[Уравнение 7]

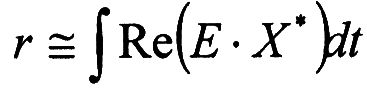
Кроме того, амплитудная управляющая информация r может быть выражена Уравнением 8.
[Уравнение 8]

Соответственно, детектор 105 фазовой ошибки вычисляет фазовую управляющую информацию θ как индекс фазовой ошибки в соответствии с Уравнением 7. Кроме того, детектор 106 амплитудной ошибки вычисляет амплитудную управляющую информацию r как индекс амплитудной ошибки в соответствии с Уравнением 8. С использованием вышеизложенной схемы управления контуром и ее способа вычисления можно одновременно формировать сигнал r171 фазовой ошибки и сигнал r172 амплитудной ошибки и отправлять их в контурный фильтр 108, чтобы контроллер 107 контурного фильтра не должен был вычислять и сохранять среднее значение сигнала r171 фазовой ошибки и сигнала r172 амплитудной ошибки.
В схеме 51 восстановления несущей контроллер 107 контурного фильтра управляет шириной полосы пропускания контурного фильтра 108 на основе сигнала r171 фазовой ошибки и сигнала r172 амплитудной ошибки, чтобы можно было улучшать характеристики вероятности ошибки на бит (BER) посредством оптимизации ширины полосы пропускания.
Существует известный способ оценки фазовых ошибок и амплитудных ошибок, в котором используется минимальная квадратичная ошибка между входным сигналом, соотнесенным с точкой созвездия с максимальной амплитудой в QAM и упомянутой точкой созвездия, а также минимальная квадратичная ошибка между входным сигналом, соотнесенным с точкой созвездия с минимальной амплитудой и упомянутой точкой созвездия. В этом известном способе используется только входной сигнал, соотнесенный с точкой созвездия с максимальной амплитудой или с точкой созвездия с минимальной амплитудой, следовательно, это не целесообразно, потому что это может уменьшать количество отсчетов с увеличением количества входных сигналов, которые не используются в способе модуляции с высоким уровнем множества значений. Кроме того, в упомянутом известном способе предполагается существование как точки созвездия с максимальной амплитудой, так и точки созвездия с минимальной амплитудой, поэтому его нельзя применить к схеме демодуляции согласно способу модуляции PSK, не подверженному вариациям амплитуды.
Напротив, в настоящем варианте осуществления, оснащенном детектором 105 фазовой ошибки, исполняющим обнаружение фазовой ошибки, и детектором 106 амплитудной ошибки, исполняющим обнаружение амплитудной ошибки, используются все входные сигналы как отсчеты для возможности применения к способу модуляции с высоким уровнем множества значений. Кроме того, в настоящем варианте осуществления не предполагается существование точки созвездия с максимальной амплитудой и точки созвездия с минимальной амплитудой, поэтому его можно применять к схеме демодуляции согласно способу модуляции PSK. В связи с этим схема 1 демодуляции включает в себя квадратурный детектор 102, аналого-цифровой преобразователь 103, контурный фильтр 108 и генератор 109 колебаний с числовым программным управлением, все из которых, как известно, являются составляющими элементами, следовательно, их подробное описание не включено в данное описание.
Второй вариант осуществления
Фиг.13 является блок-схемой, на которой изображено устройство схемы 2 демодуляции согласно второму варианту осуществления настоящего изобретения. Здесь составляющие элементы, соответствующие составляющим элементам схемы 1 демодуляции, изображенной на фиг.1, обозначены теми же ссылочными позициями. Схема 2 демодуляции может обрабатывать принимаемые сигналы с меняющимся отношениями C/N.
Схема 2 демодуляции включает в себя генератор 101 опорных колебаний, квадратурный детектор 102, аналого-цифровой преобразователь 103 и схему 52 восстановления несущей. Схема 52 восстановления несущей включает в себя фазовращатель 104, детектор 105 фазовой ошибки, детектор 106 (амплитудной ошибки), контурный фильтр 108 и генератор 109 колебаний с числовым программным управлением. Кроме того, схема 52 восстановления несущей включает в себя вторичный фазовращатель 104-2, вторичный детектор 105-2 фазовой ошибки, вторичный детектор 106-2 амплитудной ошибки, вторичный контурный фильтр 108-2, вторичный генератор 109-2 колебаний (с числовым программным управлением) и контроллер 207 контурного фильтра.
Первый контур восстановления несущей включает в себя фазовращатель 104, детектор 105 фазовой ошибки, детектор 106 амплитудной ошибки, контурный фильтр 108, генератор 109 колебаний с числовым программным управлением и контроллер 207 контурного фильтра, а второй контур восстановления несущей включает в себя фазовращатель 104-2, детектор 105-2 фазовой ошибки, детектор 106-2 амплитудной ошибки, контурный фильтр 108-2, генератор 109-2 колебаний с числовым программным управлением и контроллер 207 контурного фильтра. Схема 2 демодуляции второго варианта осуществления отличаются от схемы 1 демодуляции первого варианта осуществления тем, что она включает в себя множество контуров восстановления несущей, которые независимо выполняют процессы восстановления несущей на контурных фильтрах 108 и 108-2. Так как схема 2 демодуляции включает в себя множество контуров восстановления несущей, оба из которых выполняют операции после приема того же сигнала основной полосы частот, то эти контуры восстановления несущей подвергаются одинаковому отношению C/N, включенному в сигнал основной полосы частот, но они используют разностные коэффициенты контурного фильтра, чтобы вызвать разности в их характеристиках.
Фиг.14 является блок-схемой, на которой изображено устройство контроллера 207 контурного фильтра. Здесь составляющие элементы, соответствующие составляющим элементам контроллера 107 контурного фильтра, изображенного на фиг.4, обозначены одинаковыми ссылочными позициями. Контроллер 207 контурного фильтра включает в себя вычитающее устройство 674 и блок 677 вычисления коэффициента контурного фильтра наряду с вычитающим устройством 571, блок 572 определения увеличения ширины полосы пропускания, блок 575 определения уменьшения ширины полосы пропускания, устройство 576 пересчета ширины полосы пропускания. Вычитающее устройство 571 вычитает сигнал r272 амплитудной ошибки 106 детектора амплитудной ошибки из сигнала r271 фазовой ошибки детектора 105 фазовой ошибки и отправляет разность r277 в блок 572 определения увеличения ширины полосы пропускания. Вычитающее устройство 674 вычитает сигнал r272 амплитудной ошибки детектора 106 амплитудной ошибки из сигнала r273 амплитудной ошибки детектора 106-2 амплитудной ошибки и отправляет разность r279 в схему 575 определения уменьшения ширины полосы пропускания. Устройство 576 пересчета ширины полосы пропускания увеличивает или уменьшает свое значение вычисления на основе сигнала увеличения ширины полосы пропускания блока 572 определения увеличения ширины полосы пропускания и сигнала уменьшения ширины полосы пропускания блока 575 определения увеличения ширины полосы пропускания. Блок 677 вычисления коэффициента контурного фильтра вычисляет первый коэффициент контурного фильтра, представляющий ширину полосы пропускания контурного фильтра 108, и второй коэффициент контурного фильтра, представляющий ширину полосы пропускания контурного фильтра 108-2, на основе значения вычисления устройства 576 пересчета ширины полосы пропускания.
Ниже описывается обработка демодуляции схемы 2 демодуляции со ссылкой на блок-схему, изображенную на фиг.11. Схема 2 демодуляции включает в себя первый и второй контуры восстановления несущей, которые устанавливают разные значения ширины полосы пропускания в контурных фильтрах 108 и 108-2. Кроме того, с изменением ширины полосы пропускания каждого контурного фильтра она определяет, будет ли улучшена BER.
Этапы S31 и S32 на фиг.15 являются аналогичными вышеизложенным этапам S11 и S12 на фиг.11. На этапе S33 аналого-цифровой преобразователь 103 выполняет аналого-цифровое преобразование на сигналах основной полосы частот Ich/Qch, вырабатываемых квадратурным детектором 102, и отправляет оцифрованные сигналы основной полосы частот Ich/Qch в фазовращатели 104 и 104-2.
На этапе S34 фазовращатель 104 поворачивает фазы оцифрованных сигналов основной полосы частот Ich/Qch для исправления фазовых ошибок. Фазовращатель 104 отправляет сигналы основной полосы частот Ich/Qch со скорректированной фазовой ошибкой, как выходные сигналы r22 Ich/Qch, во внешнюю схему с доставкой их в детектор 105 фазовой ошибки и детектор 106 амплитудной ошибки. Кроме того, фазовращатель 104 поворачивает фазы оцифрованных сигналов основной полосы частот Ich/Qch для исправления фазовых ошибок. Фазовращатель 104-2 отправляет сигналы основной полосы частот Ich/Qch со скорректированной фазовой ошибкой в детектор 105-2 фазовой ошибки и детектор 106-2 амплитудной ошибки.
На этапе S35, аналогичном вышеизложенному этапу S15, детектор 105 фазовой ошибки обнаруживает фазовые ошибки, которые остаются в сигналах основной полосы частот Ich/Qch, вырабатываемых фазовращателем 104, для отправки сигнала r271 фазовой ошибки в контурный фильтр 108 и контроллер 207 контурного фильтра. Кроме того, детектор 105-2 фазовой ошибки обнаруживает фазовые ошибки, которые остаются в сигналах основной полосы частот Ich/Qch, вырабатываемых фазовращателем 104-2, для отправки сигнала фазовой ошибки в контурный фильтр 108-2.
Кроме того, детектор 106 амплитудной ошибки обнаруживает амплитудные ошибки, которые остаются в сигналах основной полосы частот Ich/Qch, вырабатываемых фазовращателем 104, для отправки сигнала r272 амплитудной ошибки в контроллер 207 контурного фильтра. Кроме того, детектор 106-2 амплитудной ошибки обнаруживает амплитудные ошибки, которые остаются в сигналах основной полосы частот Ich/Qch, вырабатываемых фазовращателем 104-2, для отправки сигнала r273 амплитудной ошибки в контроллер 207 контурного фильтра.
На этапе S36 контроллер 207 контурного фильтра управляет значениями ширины полосы пропускания контурных фильтров 108 и 108-2 на основе сигнала r271 фазовой ошибки детектора 105 фазовой ошибки, сигнала r272 амплитудной ошибки детектора 106 амплитудной ошибки и сигнала r273 амплитудной ошибки детектора амплитудной ошибки 106-2.
В контроллере 207 контурного фильтра вычитающее устройство 571 вычитает сигнал r272 амплитудной ошибки из сигнала r271 фазовой ошибки, для отправки разности r277 в блок 572 определения увеличения ширины полосы пропускания. Блок 572 определения увеличения ширины полосы пропускания отправляет сигнал увеличения ширины полосы пропускания в устройство 576 пересчета ширины полосы пропускания, когда разность r277 больше заданного порогового значения r276. С другой стороны, вычитающее устройство 674 вычитает сигнал r272 амплитудной ошибки из сигнала r273 амплитудной ошибки для отправки разности r279 в блок 575 определения уменьшения ширины полосы пропускания. Блок 575 определения уменьшения ширины полосы пропускания отправляет сигнал уменьшения ширины полосы пропускания в устройство 576 пересчета ширины полосы пропускания, когда разность r279 больше заданного порогового значения r278.
Устройство 576 пересчета ширины полосы пропускания увеличивает или уменьшает свое значение вычисления в ответ на сигнал увеличения ширины полосы пропускания или сигнал уменьшения ширины полосы пропускания, при этом отправляет его в блок 677 вычисления коэффициента контурного фильтра.
Блок 677 вычисления коэффициента контурного фильтра вычисляет первый коэффициент контурного фильтра, применяемый к контурному фильтру 108, на основе значения вычисления устройства 576 пересчета ширины полосы пропускания. Кроме того, блок 677 вычисления коэффициента контурного фильтра вычисляет второй коэффициент контурного фильтра, применяемый к контурному фильтру 108-2, на основе значения устройства 576 пересчета ширины полосы пропускания. Ширина полосы пропускания контурного фильтра 108-2, задаваемая вторым коэффициентом контурного фильтра, увеличивается так, чтобы она была больше ширины полосы пропускания контурного фильтра 108, задаваемой первым коэффициентом контурного фильтра, на заданное значение. Блок 677 вычисления коэффициента контурного фильтра отправляет первый и второй коэффициенты контурного фильтра в контурные фильтры 108 и 108-2.
На этапе S37 контурный фильтр 108, ширина полосы пропускания которого задается первым коэффициентом контурного фильтра, удаляет лишние высокочастотные компоненты из сигнала фазовой ошибки, вырабатываемого детектором 105 фазовой ошибки, при этом отправляет его в генератор 109 колебаний с числовым программным управлением. Кроме того, контурный фильтр 108-2, ширина полосы пропускания которого задается вторым коэффициентом контурного фильтра, удаляет лишние высокочастотные компоненты из сигнала фазовой ошибки, вырабатываемого детектором 105-2 фазовой ошибки, при этом отправляет его в генератор 109-2 колебаний с числовым программным управлением.
На этапе S38 генератор 109 колебаний с числовым программным управлением формирует сигнал в форме синусоидальной волны и сигнал в форме косинусоидальной волны с инверсной фазой на основе сигнала фазовой ошибки из контурного фильтра 108, при этом отправляет их в фазовращатель 104. Фазовращатель 104 поворачивает фазы сигналов основной полосы частот Ich/Qch на основе сигнала в форме синусоидальной волны и сигнала в форме косинусоидальной волны с инверсной фазой, которые вырабатываются генератором 109 колебаний с числовым программным управлением. Кроме того, генератор 109-2 колебаний с числовым программным управлением вырабатывает сигнал в форме синусоидальной волны и сигнал в форме косинусоидальной волны с инверсной фазой на основе сигнала фазовой ошибки, вырабатываемого контурным фильтром 108-2, при этом отправляет их в фазовращатель 109-2. Фазовращатель 109 поворачивает фазы сигналов основной полосы частот Ich/Qch на основе синусоидального сигнала и сигнала в форме косинусоидальной волны с инверсной фазой, которые вырабатываются генератором 109-2 колебаний с числовым программным управлением. Схема 2 демодуляции непрерывно исполняет вышеизложенную обработку демодуляции на входных сигналах r21 IF.
Соответственно, блок 677 вычисления коэффициента контурного фильтра управляет шириной полосы пропускания контурного фильтра 108-2 так, чтобы она была больше ширины полосы пропускания контурного фильтра 108. Предполагается, что, когда вычитающее устройство 674 вырабатывает положительную разность r279 (т.е. разность, вырабатываемая при вычитании сигнала r272 амплитудной ошибки первого контура восстановления несущей из сигнала r273 амплитудной ошибки второго контура восстановления несущей), увеличение ширины полосы пропускания контурного фильтра 108 может увеличить амплитудные ошибки. Поэтому, когда разность r279 больше порога r278, блок 575 определения уменьшения ширины полосы пропускания вырабатывает сигнал уменьшения ширины полосы пропускания для уменьшения ширины полосы пропускания контурного фильтра 108, при этом сокращаются амплитудные ошибки.
В связи с этим блок 677 вычисления коэффициента контурного фильтра может управлять шириной полосы пропускания контурного фильтра 108-2 так, чтобы она была меньше ширины полосы пропускания контурного фильтра 108, так что вычитающее устройство 674 может вычитать сигнал r273 амплитудной ошибки из сигнала r272 амплитудной ошибки. Соответственно, можно определять, уменьшаются ли амплитудные ошибки из-за уменьшения ширины полосы пропускания контурного фильтра 108.
Во втором варианте осуществления, когда и сигнал увеличения ширины полосы пропускания, и сигнал уменьшения ширины полосы пропускания одновременно подаются в устройство 576 пересчета ширины полосы пропускания, процесс увеличения ширины полосы пропускания или процесс уменьшения ширины полосы пропускания выполняются на основе заданного приоритетного порядка, при этом предотвращается состояние взаимной блокировки из-за конфликта процессов. В этом случае можно сначала выполнять или процесс увеличения ширины полосы пропускания, или процесс уменьшения ширины полосы пропускания.
В схеме 52 восстановления несущей второго варианта осуществления, контроллер 207 контурного фильтра управляет значениями ширины полосы пропускания контурных фильтров 108 и 108-2 на основе фазовых ошибок и амплитудных ошибок для возможности улучшения характеристик вероятности ошибки на бит (BER) посредством оптимизации значений ширины полосы пропускания. Кроме того, схема 52 восстановления несущей включает в себя множество контуров восстановления несущей с разными значениями ширины полосы пропускания контурного фильтра для управления значениями ширины полосы пропускания контурного фильтра посредством определения того, увеличиваются ли амплитудные ошибки из-за уменьшения ширины полосы пропускания контурного фильтра, на основе фазовых ошибок и амплитудных ошибок в каждом контуре восстановления несущей. Это позволяет устанавливать надлежащие коэффициенты контурного фильтра независимо от ситуации подверженности меняющимся отношениям C/N принимаемых сигналов, при этом улучшаются характеристики вероятности ошибки на бит (BER).
Наконец, настоящее изобретение не должно ограничиваться вышеизложенными вариантами осуществления, и, следовательно, оно охватывает различные модификации в пределах объема изобретения, определенного в прилагаемой формуле изобретения.
Промышленная применимость
Настоящее изобретение предпочтительно использовать в обработке для управления источником питания в переносных терминальных устройствах и мобильных терминальных устройствах, адаптированных к цифровым системам радиосвязи.
Перечень ссылочных позиций
1 схема демодуляции
51 схема восстановления несущей
101 генератор опорных колебаний
102 квадратурный детектор
103 аналого-цифровой преобразователь
104 фазовращатель
105 детектор фазовой ошибки
106 детектор амплитудной ошибки
107 контроллер контурного фильтра
108 фильтр нижних частот
109 генератор колебаний с числовым программным управлением
571 вычитающее устройство
572 блок определения увеличения ширины полосы пропускания
573 блок сохранения минимального значения
574 вычитающее устройство
575 блок определения уменьшения ширины полосы пропускания
576 устройство пересчета ширины полосы пропускания
577 блок вычисления коэффициента контурного фильтра
2 схема демодуляции
52 схема восстановления несущей
104-2 фазовращатель
105-2 детектор фазовой ошибки
106-2 детектор амплитудной ошибки
108-2 контурный фильтр
109-2 генератор колебаний с числовым программным управлением
207 контроллер контурного фильтра
674 вычитающее устройство
677 блок вычисления коэффициента контурного фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СВЯЗИ, УСТРОЙСТВО ДЕМОДУЛЯЦИИ, УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ, УСТРОЙСТВО КОМПЕНСАЦИИ ФАЗОВОЙ ОШИБКИ, СПОСОБ КОМПЕНСАЦИИ ФАЗОВОЙ ОШИБКИ И ЗАПОМИНАЮЩИЙ НОСИТЕЛЬ, НА КОТОРОМ СОХРАНЕНА ПРОГРАММА КОМПЕНСАЦИИ ФАЗОВОЙ ОШИБКИ | 2015 |
|
RU2650179C2 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ДЕМОДУЛЯТОРА СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ ВЫСОКИХ ПОРЯДКОВ | 2018 |
|
RU2693272C1 |
| УСТРОЙСТВО ПРИЕМА СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 2018 |
|
RU2707729C1 |
| Устройство приема сигналов квадратурной амплитудной манипуляции | 2021 |
|
RU2756906C1 |
| УСТРОЙСТВО ДЛЯ ДЕМОДУЛЯЦИИ ШУМОПОДОБНОГО СИГНАЛА | 1985 |
|
SU1840005A1 |
| Радиолиния, защищенная от несанкционированного доступа | 2023 |
|
RU2820855C1 |
| ИЗМЕРИТЕЛЬ ФАЗ ОСЦИЛЛОГРАФИЧЕСКИЙ | 2005 |
|
RU2314543C2 |
| ПАРАЛЛЕЛЬНЫЙ КОРОТКОВОЛНОВЫЙ МОДЕМ | 2004 |
|
RU2286648C2 |
| УСТРОЙСТВО МАГНИТНОЙ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЦИФРОВОГО СИГНАЛА (ВАРИАНТЫ) | 1994 |
|
RU2127913C1 |
| ДЕМОДУЛЯТОР И СПОСОБ КОМПЕНСАЦИИ ФАЗЫ ДЛЯ НЕГО | 2006 |
|
RU2308815C1 |
Изобретение относится к технике цифровой беспроводной связи и может быть использовано в демодуляторе на основе способа квазикогерентного детектирования. Технический результат - повышение качества демодуляции. В схеме восстановления несущей фазовращатель осуществляет поворот фазы сигнала основной полосы частот, детектрируемого из принятого сигнала. Контроллер контурного фильтра управляет шириной пропускания контурного фильтра на основе фазовой ошибки и амплитудной ошибки сигнала основной полосы. Контроллер поворота фазы управляет упомянутым фазовращателем на основе упомянутой фазовой ошибки с удалением ее высокочастотного компонента. Ширина полосы пропускания контурного фильтра увеличивается, когда разность между фазовой и амплитудной ошибками больше заданного значения, и уменьшается при определении, что амплитудная ошибка уменьшается вследствие уменьшения полосы пропускания контурного фильтра. 4 н. и 5 з.п. ф-лы, 16 ил.
1. Схема восстановления несущей, адаптированная к схеме демодуляции согласно способу квазикогерентного детектирования, причем упомянутая схема восстановления несущей содержит:
фазовращатель, который поворачивает фазу сигнала основной полосы частот, детектируемого из принятого сигнала,
детектор фазовой ошибки, который обнаруживает фазовую ошибку, включенную в упомянутый сигнал основной полосы частот с повернутой фазой,
детектор амплитудой ошибки, который обнаруживает амплитудную ошибку, включенную в упомянутый сигнал основной полосы частот с повернутой фазой,
контурный фильтр, который удаляет высокочастотный компонент из упомянутой фазовой ошибки,
контроллер контурного фильтра, который управляет шириной полосы пропускания упомянутого контурного фильтра на основе упомянутой фазовой ошибки и упомянутой амплитудной ошибки, и
контроллер поворота фазы, который управляет упомянутым фазовращателем на основе упомянутой фазовой ошибки с удалением ее высокочастотного компонента,
причем контроллер контурного фильтра увеличивает ширину полосы пропускания контурного фильтра, когда разность между фазовой ошибкой и амплитудной ошибкой больше заданного порогового значения, в то время как контроллер контурного фильтра уменьшает ширину полосы пропускания контурного фильтра при определении, что амплитудная ошибка уменьшается вследствие уменьшения ширины полосы пропускания контурного фильтра.
2. Схема восстановления несущей по п.1, в которой контроллер контурного фильтра определяет, что амплитудная ошибка уменьшается вследствие уменьшения ширины полосы пропускания контурного фильтра, когда разность между амплитудной ошибкой и минимальным значением предыдущих амплитудных ошибок больше заданного порогового значения.
3. Схема восстановления несущей по п.1, в которой контроллер поворота фазы является генератором колебаний с числовым программным управлением, который вырабатывает сигнал в форме синусоидальной волны и сигнал в форме косинусоидальной волны с инверсной фазой на основе фазовой ошибки с удалением ее высокочастотного компонента для отправки их в фазовращатель, таким образом управляя поворотом фазы, применяемым к сигналу основной полосы частот.
4. Схема восстановления несущей по п.1, дополнительно содержащая:
вторичный фазовращатель, который поворачивает фазу сигнала основной полосы частот, детектируемого из принятого сигнала,
вторичный детектор фазовой ошибки, который обнаруживает фазовую ошибку, включенную в сигнал основной полосы частот, фаза которого повернута упомянутым вторичным фазовращателем,
вторичный детектор амплитудной ошибки, который обнаруживает амплитудную ошибку, включенную в сигнал основной полосы частот, фаза которого повернута упомянутым вторичным фазовращателем,
вторичный контурный фильтр, который удаляет высокочастотный компонент из фазовой ошибки, выявленной упомянутым вторичным детектором фазовой ошибки, и
вторичный контроллер поворота фазы, который управляет упомянутым вторичным фазовращателем на основе фазовой ошибки, высокочастотный компонент которой удален упомянутым вторичным контурным фильтром,
причем контроллер контурного фильтра устанавливает разные значения ширины полосы пропускания в контурном фильтре и вторичных контурных фильтрах, причем контроллер контурного фильтра увеличивает ширину полосы пропускания как контурного фильтра, так и вторичного контурного фильтра, когда разность между фазовой ошибкой детектора фазовой ошибки и амплитудной ошибкой детектора амплитудной ошибки больше заданного порогового значения, и причем контроллер контурного фильтра определяет, что амплитудная ошибка уменьшается вследствие уменьшения ширины полосы пропускания контурного фильтра, когда разность между амплитудной ошибкой детектора амплитудной ошибки и амплитудной ошибкой вторичного детектора амплитудной ошибки больше заданного порогового значения, при этом уменьшается ширина полосы пропускания как контурного фильтра, так и вторичного контурного фильтра.
5. Схема восстановления несущей по п.4, в которой вторичный контроллер поворота фазы является генератором колебаний с числовым программным управлением, который формирует сигнал в форме синусоидальной волны и сигнал в форме косинусоидальной волны с инверсной фазой на основе разности фаз, высокочастотный компонент которых удален вторичным контурным фильтром, таким образом управляя поворотом фазы, применяемой к сигналу основной полосы частот.
6. Схема демодуляции, содержащая:
генератор опорных колебаний, который выполняет генерацию свободных колебаний на опорном сигнале с опорной частотой,
квадратурный детектор, который демодулирует принятый сигнал, имеющий промежуточную частоту с упомянутым опорным сигналом, для формирования сигналов основной полосы частот, фазы которых являются ортогональными друг к другу,
аналого-цифровой преобразователь, который выполняет аналого-цифровое преобразование на упомянутых сигналах основной полосы частот,
фазовращатель, который поворачивает фазы упомянутых оцифрованных сигналов основной полосы частот,
детектор фазовой ошибки, который обнаруживает фазовую ошибку, включенную в упомянутые сигналы основной полосы частот с повернутыми фазами,
детектор амплитудной ошибки, который обнаруживает амплитудную ошибку, включенную в упомянутые сигналы основной полосы частот с повернутыми фазами,
контурный фильтр, который удаляет высокочастотный компонент из упомянутой фазовой ошибки,
контроллер контурного фильтра, который управляет шириной полосы пропускания упомянутого контурного фильтра на основе упомянутой фазовой ошибки и упомянутой амплитудной ошибки, причем контроллер контурного фильтра увеличивает ширину полосы пропускания контурного фильтра, когда разность между фазовой ошибкой и амплитудной ошибкой больше заданного порогового значения, в то время как контроллер контурного фильтра уменьшает ширину полосы пропускания контурного фильтра при определении, что амплитудная ошибка уменьшается вследствие уменьшения ширины полосы пропускания контурного фильтра, и
контроллер поворота фазы, который управляет упомянутым фазовращателем на основе упомянутой фазовой ошибки с удалением ее высокочастотного компонента.
7. Схема демодуляции по п.6, дополнительно содержащая:
вторичный фазовращатель, который поворачивает фазы сигналов основной полосы частот, детектируемых из принятого сигнала,
вторичный детектор фазовой ошибки, который обнаруживает фазовую ошибку, включенную в сигналы основной полосы частот, фазы которых повернуты упомянутым вторичным фазовращателем,
вторичный детектор амплитудной ошибки, который обнаруживает амплитудную ошибку, включенную в сигналы основной полосы частот, фазы которых повернуты упомянутым вторичным фазовращателем,
вторичный контурный фильтр, который удаляет высокочастотный компонент из фазовой ошибки, выявленной упомянутым вторичным детектором фазовой ошибки, и
вторичный контроллер поворота фазы, который управляет упомянутым вторичным фазовращателем на основе фазовой ошибки, высокочастотный компонент которой удален упомянутым вторичным контурным фильтром,
причем контроллер контурного фильтра устанавливает разные значения ширины полосы пропускания в контурный фильтр и вторичные контурные фильтры, причем контроллер контурного фильтра увеличивает ширину полосы пропускания как контурного фильтра, так и вторичного контурного фильтра, когда разность между фазовой ошибкой детектора фазовой ошибки и амплитудной ошибкой детектора амплитудной ошибки больше заданного порогового значения, и причем контроллер контурного фильтра уменьшает ширину полосы пропускания как контурного фильтра, так и вторичного контурного фильтра, когда разность между амплитудной ошибкой детектора амплитудной ошибки и амплитудной ошибкой вторичного детектора амплитудной ошибки больше заданного порогового значения.
8. Способ восстановления несущей, адаптированный к схеме демодуляции согласно способу квазикогерентного детектирования, причем упомянутый способ восстановления несущей содержит этапы, на которых:
выполняют поворот фазы сигнала основной полосы частот, детектируемого из принятого сигнала,
обнаруживают фазовую ошибку, включенную в упомянутый сигнал основной полосы частот с повернутой фазой,
обнаруживают амплитудную ошибку, включенную в упомянутый сигнал основной полосы частот с повернутой фазой,
управляют шириной полосы пропускания контурного фильтра на основе упомянутой фазовой ошибки и упомянутой амплитудной ошибки, таким образом удаляя высокочастотный компонент из упомянутой фазовой ошибки, причем ширину полосы пропускания контурного фильтра увеличивают, когда разность между фазовой ошибкой и амплитудной ошибкой больше заданного порогового значения, в то время как ширину полосы пропускания контурного фильтра уменьшают при определении, что амплитудная ошибка уменьшается вследствие уменьшения ширины полосы пропускания контурного фильтра, и
управляют поворотом фазы на основе упомянутой фазовой ошибки с удалением ее высокочастотного компонента.
9. Способ демодуляции согласно способу квазикогерентного детектирования с использованием контурного фильтра, причем упомянутый способ демодуляции содержит этапы, на которых:
демодулируют принятый сигнал, имеющий промежуточную частоту с опорным сигналом, имеющим опорную частоту, таким образом формируя сигналы основной полосы частот, фазы которых являются ортогональными друг к другу,
выполняют аналого-цифровое преобразование на упомянутых сигналах основной полосы частот,
выполняют поворот фаз упомянутых оцифрованных сигналов основной полосы частот,
обнаруживают фазовую ошибку, включенную в упомянутые сигналы основной полосы частот с повернутыми фазами,
обнаруживают амплитудную ошибку, включенную в упомянутые сигналы основной полосы частот с повернутыми фазами,
управляют шириной полосы пропускания контурного фильтра на основе упомянутой фазовой ошибки и упомянутой амплитудной ошибки, причем ширину полосы пропускания контурного фильтра увеличивают, когда разность между фазовой ошибкой и амплитудной ошибкой больше заданного порогового значения, в то время как ширину полосы пропускания контурного фильтра уменьшают при определении, что амплитудная ошибка уменьшается вследствие уменьшения ширины полосы пропускания контурного фильтра, и
управляют поворотом фазы на основе упомянутой фазовой ошибки, высокочастотный компонент которой удален упомянутым контурным фильтром.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 6310513 B1, 30.10.2001 | |||
| JP 2000101666 A, 07.04.2000 | |||
| JP11136301 A , 21.05.1999 | |||
| JP 2006121245 A, 11.05 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| JP 2002094585 A, 29.03.2002 | |||
| US 2005289606 A1 ,29.12.2005 | |||
| Устройство для разделения волокнистого материала по длине волокон | 1932 |
|
SU32346A1 |
| Устройство восстановления несущей частоты | 1990 |
|
SU1755388A1 |

