Изобретение относится к системам охранной (тревожной) сигнализации и мониторинга транспортных средств (ТС) и может быть использовано для поиска и обнаружения охраняемого ТС, а также для определения местоположения и сопровождения угнанных ТС (УТС).
Известна радиоканальная система тревожной сигнализации для централизованной охраны объектов, в том числе ТС, по патенту RU №2182088, В 60 R 25/00, содержащая установленные на ТС блоки возимых охранных извещателей, связанные с возимыми объектовыми оконечными устройствами, центр сбора и обработки информации, имеющий пультовое оконечное устройство с антенной пультового оконечного устройства для связи по радиоэфиру и пульт централизованного наблюдения (ПЦН), блок обработки и отображения картографической и семантической информации, процессор обработки информации, выполненный с возможностью подключения к блоку обработки и отображения картографической и семантической информации и с возможностью вывода информации на принтер, при этом связь по радиоэфиру осуществляется с помощью микросотовой сети передачи данных (МСПД), выполненной с возможностью приема кодовых сообщений от объектовых оконечных устройств, селекции и ретрансляции указанных сообщений.
Применение в данной системе МСПД, с одной стороны, позволяет, при прочих равных условиях, снизить требуемую мощность излучения с борта охраняемого ТС и, соответственно, упростить и сделать более доступной абонентскую аппаратуру, а с другой стороны, обуславливает ее недостаток, проявляющийся тем сильнее, чем больше требуемая зона действия системы. Недостаток этот состоит в необходимости увеличения количества наземных ретрансляторов пропорционально квадрату желаемого радиуса действия системы. Это усложняет инфраструктуру системы, увеличивает ее стоимость и порождает проблемы организационно-технического плана.
На устранение указанных недостатков направлена радиоканальная система сбора и обработки информации для централизованной охраны объектов по патенту RU №2198800, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00. Указанная радиоканальная система содержит стационарные установки охранной сигнализации и установленные на охраняемых ТС возимые установки охранной сигнализации, выполненные с возможностью определения состояния охраняемых ТС и изменений этих состояний, формирования и передачи извещений о состоянии охраняемых ТС и извещений об изменениях этих состояний с помощью стандартной сотовой сети подвижной связи, фрагментов МСПД и стационарных установок охранной сигнализации, центр сбора и обработки информации, содержащий пультовое оконечное устройство, связанное через центральный радиомодем со стандартной сотовой сетью подвижной связи, и ПЦН, включающий в себя адаптер ввода информации, выполненный с возможностью приема сообщений из внешней телефонной сети, и подключенный к нему процессор обработки информации, выходы которого подключены, соответственно, к блоку обработки и отображения картографической и семантической информации и к принтеру. При этом территориально распределенные ретрансляционные узлы МСПД выполнены с возможностью приема сообщений от стационарных и возимых установок охранной сигнализации, селекции указанных сообщений и ретрансляции их по радиоэфиру и/или по проводным каналам связи. В стационарных и возимых установках охранной сигнализации и в центре сбора и обработки информации в качестве радиомодемов могут использоваться GSM-модули, связанные со стандартной сотовой сетью подвижной связи стандарта GSM.
Применение, наряду с фрагментами МСПД, стандартной сотовой сети подвижной связи позволяет упростить реализацию системы, но не устраняет другого недостатка вышеупомянутого аналога - низкой помехозащищенности системы. Дело в том, что GSM-сети весьма уязвимы по отношению к преднамеренным (умышленным) помехам, которые может применить злоумышленник в зоне действия установки охранной сигнализации. Так, в рекламных материалах израильской фирмы NetLine приведена информация о серийно выпускаемом постановщике помехи - джаммере C-Guard LP. При массе 0,6 кг и средней мощности излучения до 50 мВт он обеспечивает эффективное блокирование абонентских терминалов практически всех известных сотовых сетей подвижной связи в радиусе до 80 м.
На устранение указанного недостатка, а также на повышение точности определения текущего местоположения охраняемого ТС направлено изобретение по патенту RU №2220859, В 60 R 25/00, G 08 В 25/00, выбранное в качестве прототипа настоящего изобретения.
Представленная в нем система содержит территориально распределенные ретрансляционные узлы фрагментов МСПД и стационарные объектовые оконечные устройства, выполненные с возможностью приема сообщений от установленных на охраняемых ТС возимых установок охранной сигнализации и ретрансляции этих сообщений через фрагменты МСПД, центр сбора и обработки информации, содержащий блок обработки и отображения картографической и семантической информации, сервер картографических данных, пультовое оконечное устройство и ПЦН, содержащий последовательно соединенные адаптер ввода информации и блок первичной обработки информации, при этом пультовое оконечное устройство связано с адаптером ввода информации и через центральный радиомодем подключено к стандартной сотовой сети подвижной связи, например, стандарта GSM, а каждая из установленных на охраняемых ТС возимых установок охранной сигнализации содержит блок возимых охранных извещателей, выходы которого подключены ко входам возимого объектового оконечного устройства, связанного по радиоэфиру с одним или несколькими ретрансляционными узлами МСПД и/или с одним или несколькими стационарными объектовыми оконечными устройствами, и ко входам контроллера, связанного через возимый радиомодем со стандартной сотовой сетью подвижной связи, - по крайней мере, часть возимых установок охранной сигнализации содержит автономное передающее устройство, подключенное к выходам блока возимых охранных извещателей и выполненное с возможностью формирования и излучения в радиоэфир кодовых посылок, несущих информацию о состоянии охраняемого ТС, а на местности установлены радиопеленгационные станции, управляемые из центрального пункта управления, связанного с пультовым оконечным устройством, каждая возимая установка охранной сигнализации содержит блок навигационных измерений, включающий в себя приемник глобальной спутниковой системы радионавигации, например, GPS-приемник, а блок вторичной обработки информации выполнен с возможностью оптимальной фильтрации результатов первичной обработки информации с использованием для расчета траектории движения охраняемого ТС модели улично-дорожной сети.
Высокая точность определения координат достигается в указанной системе, благодаря применению на борту охраняемого ТС GPS-приемника, а высокая помехозащищенность - вследствие высокой мощности излучения автономного передающего устройства (более 0,5 Вт).
Указанные особенности обуславливают и недостатки указанной системы.
Дело в том, что для обеспечения приемлемой точности определения местоположения охраняемого ТС GPS-приемник должен всегда находиться в зоне уверенного приема сигналов глобальной спутниковой системы навигации одновременно от нескольких (не менее четырех) спутников, что в городских условиях трудновыполнимо. Во-первых, на прохождение спутниковых сигналов влияет затенение, особенно в районах высотной застройки. Во-вторых, угонщики могут использовать преднамеренные помехи приему сигналов GPS-приемником ("глушение" GPS-приемника). Случаи такого "глушения" описаны в печати (например, в статье "Теория и практика падающих томагавков" в журнале "Компьютерра", №34, 2000). В-третьих, США, как владельцы GPS, не исключают возможности ее временной блокировки (в кризисных ситуациях национального масштаба). Как сообщило на своем сайте www.rbc.ru 16.12.2004 агентство "Росбизнесконсалтинг", соответствующая директива подписана президентом США в декабре 2004 года.
Что же касается высокой мощности излучения с борта охраняемого ТС (или с борта УТС), то возможности ее применения в реальных условиях ограничены рядом государственных директивных документов, касающихся правил применения средств тревожной сигнализации и противоугонных устройств на охраняемых ТС.
Так, согласно Правилам ЕЭК ООН №97, введенным в действие Государственным стандартом ГОСТ Р 41.97-99 с 1 января 2000 года, система тревожной сигнализации на охраняемом ТС, обеспечивающая возможность передачи радиосигнала, в частности, сигнала тревожного сообщения, должна работать на частоте 433,92 МГц±0,2% и обладать мощностью излучения не выше 25 мВт, что соответствует дальности действия не более (0,5-1) км.
В соответствии с Решением Государственной комиссии по радиочастотам при Минсвязи России от 02.04.2001 (протокол №7/5), максимальная мощность излучения системы тревожной сигнализации, при установке которой на охраняемое ТС не требуется получение специальных разрешений на приобретение и эксплуатацию, ограничена 5 мВт, что соответствует дальности действия не более (50-100) м. Очевидно, что при такой малой дальности действия бортового передающего устройства, в масштабах города потребовалось бы разместить сотни ретрансляционных узлов, что труднореализуемо из-за экономических и организационных ограничений. Таким образом, ни одна из вышеупомянутых радиоканальных систем для мониторинга и сопровождения охраняемых ТС не свободна от недостатков, препятствующих их эффективной эксплуатации в реальных условиях.
Настоящее изобретение направлено на устранение указанных недостатков.
Предметом изобретения является радиопеленгационная система для поиска и сопровождения ТС, содержащая ретрансляционную сеть, состоящую из N территориально распределенных ретрансляционных узлов, которые выполнены с возможностью соединения по телефонной сети и/или по стандартной сотовой сети подвижной связи, например GSM-сети, с центром обработки информации, а также установленные на ТС абонентские комплекты, каждый из которых выполнен с возможностью излучения высокочастотных сигналов и содержит установку охранной сигнализации, выполненную с возможностью передачи данных по стандартной сотовой сети подвижной связи, а также блок автономной навигации, выполненный с возможностью приема и обработки сигналов глобальной спутниковой системы навигации, например GPS, и подключенный выходом ко входу установки охранной сигнализации, при этом каждый из N ретрансляционных узлов выполнен с возможностью приема высокочастотных сигналов от абонентского комплекта, - при этом каждый из абонентских комплектов содержит передатчик hopping-сигнала, управляющий вход которого подключен к выходу установки охранной сигнализации, а каждый из N ретрансляционных узлов выполнен в виде пеленгатора-ретранслятора hopping-сигнала, содержащего первый и второй приемники с общим гетеродином и разнесенными на установленное расстояние идентичными антеннами, первый и второй цифровые фильтры, первый и второй вычислители, вычислитель-синхронизатор, второй передающий радиомодуль и первый модем, причем выход первого приемника подключен ко входу первого цифрового фильтра, выходы которого через первый вычислитель соединены с первым входом вычислителя-синхронизатора, а выход второго приемника подключен ко входу второго цифрового фильтра, выходы которого через второй вычислитель соединены со вторым входом вычислителя-синхронизатора, выход синхронизации которого подключен ко входам синхронизации первого и второго цифровых фильтров, а также ко входам синхронизации первого и второго вычислителей, а информационный выход через первый модем подключен к телефонной сети и через второй передающий радиомодуль - к стандартной сотовой сети подвижной связи.
Частными существенными признаками изобретения являются следующие.
Установка охранной сигнализации содержит блок охранных извещателей, первый передающий радиомодуль, выполненный с возможностью передачи сообщений по стандартной сотовой сети подвижной связи, и контроллер, один из выходов которого подключен ко входу первого передающего радиомодуля, а другой выход служит для подключения к управляющему входу передатчика hopping-сигнала, при этом многоканальный вход контроллера подключен к выходам блока охранных извещателей, а другой вход выполнен с возможностью подключения к выходу блока автономной навигации.
Центр обработки информации содержит приемопередающий радиомодуль, выполненный с возможностью передачи и приема сообщений по стандартной сотовой сети подвижной связи, второй модем, выполненный с возможностью приема сообщений из телефонной сети, и последовательно соединенные пультовое оконечное устройство, ПЦН, блок вторичной обработки и сопровождения и блок принятия решений, выполненный с возможностью передачи сообщений по телефонной сети, соответствующий выход которого подключен к приемопередающему радиомодулю, при этом выходы приемопередающего радиомодуля и второго модема подключены к соответствующим входам пультового оконечного устройства.
Задачей изобретения является создание такой радиоканальной системы, которая была бы способна обнаруживать, определять местоположение и надежно сопровождать УТС при достаточно малых (удовлетворяющих существующим ограничениям) мощностях излучения с борта охраняемого ТС (или УТС). Причем работоспособность системы должна сохраняться в условиях применения злоумышленниками преднамеренных помех как работе GPS-приемника, так и передаче сигналов по каналам стандартной сотовой сети подвижной связи.
Обеспечиваемый технический результат непосредственно связан с применением в рассматриваемой системе так называемой hopping-технологии. Согласно толковому словарю-справочнику "Телекоммуникационные технологии", серия "Связь и бизнес", Москва, МЦНТИ, 2002, с.195, термин "hopping" означает скачкообразную перестройку частоты.
Обозначение "HOPPING" применительно к технологии формирования, излучения, приема и обработки сигналов в радиоканальных территориально распределенных охранных и противоугонных системах зарегистрировано предприятием-заявителем в качестве товарного знака (свидетельство №264485 от 01.03.2004). Реализующий указанную технологию "Способ передачи извещений для централизованной охраны ТС и объектов недвижимости" защищен патентом RU №2228275, В 60 R 25/10, G 08 В 25/10, G 08 В 29/16. Преимущество данного способа состоит в том, что он создает для злоумышленников непреодолимые сложности в блокировании передачи тревожных сообщений. Однако в данном способе не предусмотрена возможность пеленгации hopping-сигналов.
Данное изобретение относится к одной из возможных технических реализаций указанного способа, или, точнее, к такой его технической реализации, которая позволяла бы при ретрансляции hopping-сигналов осуществлять и их пеленгацию. Такая пеленгация должна обеспечивать возможность определения местонахождения охраняемого ТС (или УТС) даже в случае блокирования злоумышленниками работы GPS-приемника.
Сущность изобретения поясняется на фиг.1-5.
На фиг.1 представлена структурная схема предлагаемой радиопеленгационной системы для поиска и сопровождения ТС.
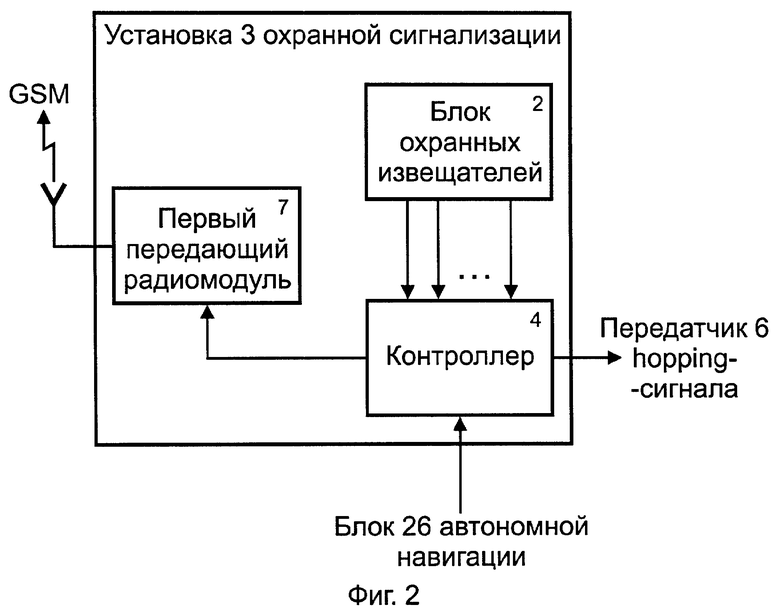
На фиг.2 показана структурная схема установки охранной сигнализации.
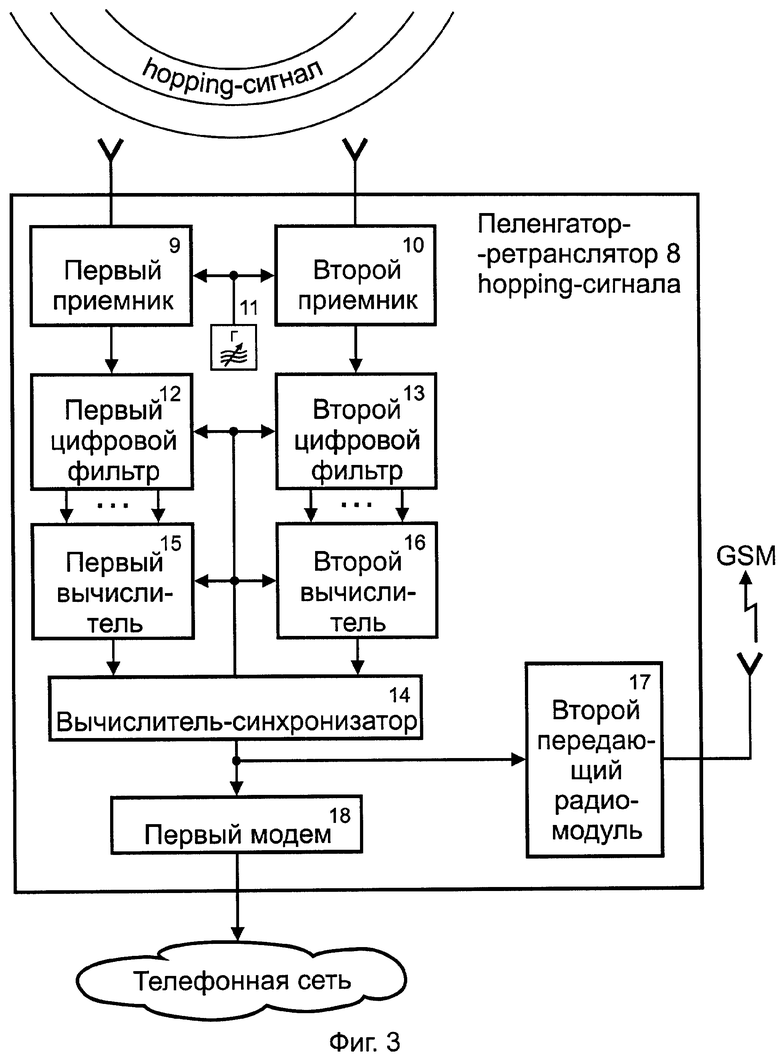
На фиг.3 показана структурная схема пеленгатора-ретранслятора hopping-сигнала.
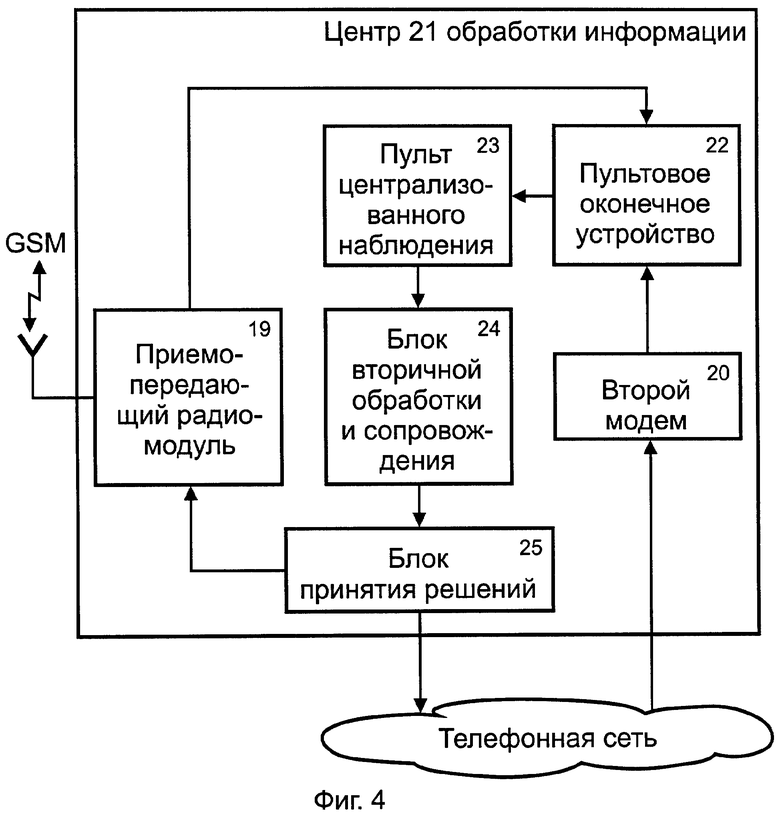
На фиг.4 показана структурная схема центра обработки информации.
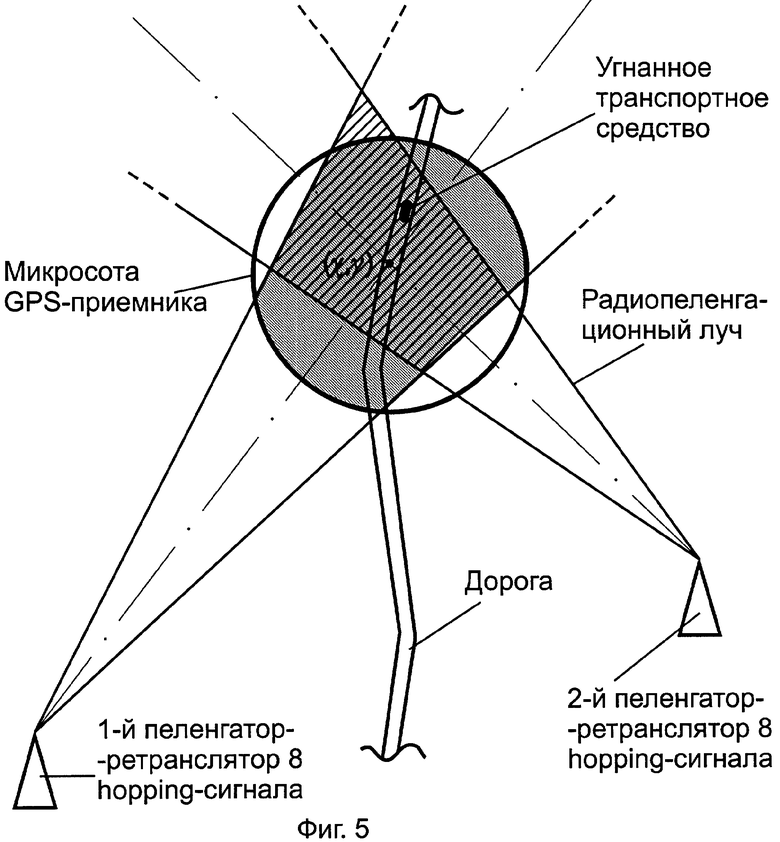
Фиг.5 иллюстрирует принцип определения местоположения охраняемого ТС в рассматриваемой системе.
На фиг.1-5 использованы следующие обозначения: 1 - абонентский комплект; 2 - блок охранных извещателей; 3 - установка охранной сигнализации; 4 - контроллер; 5 - ретрансляционная сеть; 6 - передатчик hopping-сигнала; 7 - первый передающий радиомодуль; 8 - пеленгатор-ретранслятор hopping-сигнала; 9 - первый приемник; 10 - второй приемник; 11 - гетеродин; 12 - первый цифровой фильтр; 13 - второй цифровой фильтр; 14 - вычислитель-синхронизатор; 15 - первый вычислитель; 16 - второй вычислитель; 17 - второй передающий радиомодуль; 18 - первый модем; 19 - приемопередающий радиомодуль; 20 - второй модем; 21 - центр обработки информации; 22 - пультовое оконечное устройство; 23 - ПЦН; 24 - блок вторичной обработки и сопровождения; 25 - блок принятия решений; 26 - блок автономной навигации.
Рассматриваемая радиопеленгационная система для поиска и сопровождения ТС содержит (фиг.1) ретрансляционную сеть 5, состоящую из небольшого числа N территориально распределенных пеленгаторов-ретрансляторов 8 hopping-сигнала, которые подключены к центру 21 обработки информации с помощью телефонной сети и/или с помощью стандартной сотовой сети подвижной связи, например GSM-сети, а также установленные на ТС абонентские комплекты 1, выполненные с возможностью излучения высокочастотных сигналов. Каждый абонентский комплект 1 содержит установку 3 охранной сигнализации, выполненную с возможностью передачи сообщений по стандартной сотовой сети подвижной связи, блок 26 автономной навигации, выполненный с возможностью приема и обработки сигналов глобальной спутниковой системы навигации, например GPS, и передатчик 6 hopping-сигнала.
Установка 3 охранной сигнализации содержит (фиг.2) блок 2 охранных извещателей, первый передающий радиомодуль 7, выполненный с возможностью передачи сообщений по стандартной сотовой сети подвижной связи, и контроллер 4, один из выходов которого подключен ко входу первого передающего радиомодуля 7, а другой выход выполнен с возможностью подключения к управляющему входу передатчика 6 hopping-сигнала. При этом многоканальный вход контроллера 4 подключен к выходам блока 2 охранных извещателей, а другой вход выполнен с возможностью подключения к выходу блока 26 автономной навигации.
Каждый из N пеленгаторов-ретрансляторов 8 hopping-сигнала (фиг.3) выполнен с возможностью приема по радиоэфиру hopping-сигнала от абонентского комплекта 1 и передачи данных, содержащихся в принятых hopping-сигналах, по телефонной и/или по стандартной сотовой сети подвижной связи в центр 21 обработки информации. При этом пеленгатор-ретранслятор 8 hopping-сигнала содержит первый 9 и второй 10 приемники, имеющие общий гетеродин 11 и оснащенные двумя идентичными антеннами для приема hopping-сигнала. Выход первого приемника 9 подключен ко входу первого цифрового фильтра 12. Выход второго приемника 10 подключен ко входу второго цифрового фильтра 13. Выходы первого цифрового фильтра 12 подключены к соответствующим входам первого вычислителя 15, а выходы второго цифрового фильтра 13 подключены к соответствующим входам второго вычислителя 16. При этом выход синхронизации вычислителя-синхронизатора 14 подключен ко входам синхронизации первого 12 и второго 13 цифровых фильтров, а также первого 15 и второго 16 вычислителей. Выходы первого 15 и второго 16 вычислителей подключены к соответствующим входам вычислителя-синхронизатора 14.
В свою очередь, информационный выход вычислителя-синхронизатора 14 подключен ко входам второго передающего радиомодуля 17 и первого модема 18, выполненных с возможностями передачи данных в GSM-сеть и в телефонную сеть, соответственно.
Центр 21 обработки информации содержит (фиг.4) приемопередающий радиомодуль 19, выполненный с возможностью передачи и приема сообщений по GSM-сети, второй модем 20, выполненный с возможностью приема сообщений по телефонной сети, и последовательно соединенные пультовое оконечное устройство 22, ПЦН 23, блок 24 вторичной обработки и сопровождения и блок 25 принятия решений, выполненный с возможностью передачи сообщений по телефонной сети, соответствующий выход которого подключен к приемопередающему радиомодулю 19. При этом выходы приемопередающего радиомодуля 19 и второго модема 20 подключены к соответствующим входам пультового оконечного устройства 22.
Узлы, представленные на фиг.1, 2 и 4, описаны в патентно-технической литературе и серийно выпускаются предприятием-заявителем.
Так, близким аналогом установки 3 охранной сигнализации и блока 26 автономной навигации являются узлы, входящие в состав семейства систем тревожной сигнализации "BLACK BUG SUPER" BT-85 для автомобилей. Эти системы содержат терминальное оборудование "REEF GSM-3000" (сертификат соответствия РОСС RU.MT08.B02037).
Указанные системы представлены в технической документации и рекламных материалах предприятия-заявителя, в частности в ежегодном каталоге "Автомобильные охранные системы", Москва, ООО "Альтоника", 2004. Семейство этих систем описано также в ряде патентов, полученных предприятием-заявителем: RU №2228542, В 60 R 25/00, G 01 C 21/24, G 01 C 21/26, RU №2228862, В 60 R 25/00, G 08 B 25/10.
Близким аналогом блока 26 автономной навигации является и бортовой комплект аппаратуры системы TRACER, описанной в журнале "12 Вольт", №1, 2001. Указанный комплект представляет собой малогабаритный конструктивный узел со встроенными GPS-приемником и блоком обработки навигационных измерений, выполненным с возможностью передачи результатов указанной обработки через первый передающий радиомодуль 7 по GSM-сети.
Передатчик 6 hopping-сигнала входит в состав серийно выпускаемой аппаратуры радиоканальной охранной сигнализации "REEF STRING" RS-202 (сертификаты соответствия РОСС RU.ME96.H00513 и ССПБ RU.OП019.H00259), защищенной патентами RU №2231458, В 60 R 25/00, В 60R 25/10, G 08 C 13/00 и RU №2228861, В 60 R 25/00, G 08 В 25/10.
Пеленгатор-ретранслятор 8 hopping-сигнала реализован в опытном образце, разработанном предприятием-заявителем в НИОКР "АРКАН" и прошедшем заводские испытания.
Центр 21 обработки информации представлен совокупностью трех серийно выпускаемых функциональных узлов: вышеупомянутой аппаратурой радиоканальной охранной сигнализации "REEF STRING" RS-202 с программным обеспечением RS-202, устройством оконечным передачи извещений "РИФ БАСТИОН-1" (сертификаты соответствия РОСС RU.ME30.B.00929 и РОСС RU.ME96.B.00704) и терминальным оборудованием "REEF GSM-1000" (сертификат соответствия РОСС RU.ME30.B.01155).
Радиоканальные системы, в которые входят указанные функциональные узлы, также защищены рядом патентов: RU №2240938, В 60 R 25/00, G 08 B 25/00, RU №2216463, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00, RU №2228860, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00.
Таким образом, все функциональные узлы заявляемой системы (за исключением реализованного в опытном образце пеленгатора-ретранслятора 8 hopping-сигнала) выпускаются серийно предприятием-заявителем и доступны на коммерческом рынке. Поэтому возможность практической реализации предлагаемого технического решения не вызывает сомнений.
Рассматриваемая радиопеленгационная система для поиска и сопровождения ТС работает следующим образом.
Циклограмма работы рассматриваемой системы делится на два основных этапа.
На первом этапе на охраняемом ТС обнаруживается несанкционированное воздействие, срабатывают установленные на охраняемом ТС охранные извещатели, после чего на охраняемом ТС активируется излучение тревожных сообщений. По тревожным сообщениям в центре обработки информации осуществляются обнаружение и определение местоположения источника излучения тревожных сообщений. Устанавливается факт угона ТС, после чего охраняемое ТС рассматривается как УТС.
На втором этапе УТС берется на сопровождение в центре обработки информации, строится траектория движения УТС, например маршрут его перемещения по улично-дорожной сети. Далее построенная траектория движения УТС используется при перехвате УТС силами быстрого реагирования.
Итак, при попытках угона, кражи или при любых других видах несанкционированных воздействиях на охраняемое ТС в абонентском комплекте 1 (фиг.1), установленном на охраняемом ТС, срабатывают датчики блока 2 охранных извещателей, входящего в состав установки 3 охранной сигнализации (фиг.2).
Тревожные извещения, формируемые датчиками блока 2 охранных извещателей, поступают на многоканальный вход контроллера 4. В контроллере 4 тревожные извещения преобразуются в формат, необходимый для передачи по ретрансляционной сети 5, и поступают на управляющий вход передатчика 6 hopping-сигнала.
Передатчик 6 hopping-сигнала преобразует каждое поступившее на его вход тревожное извещение в тревожное сообщение, дополнительно содержащее идентификационные признаки охраняемого ТС (государственный номер, марку и цвет ТС, фамилию и телефон владельца) и излучает сформированный таким образом hopping-сигнал в эфир. При этом для передачи логических нулей используется частота радиосигнала, случайно выбранная из допустимого диапазона частот, а для передачи логических единиц используется частота, отличающаяся от частоты передачи логического нуля на строго фиксированную величину. Промежуток времени для передачи каждого разряда тревожного сообщения строго фиксирован. Случайный выбор частоты передачи логического нуля происходит перед началом передачи каждого тревожного сообщения.
Работа передатчика 6 hopping-сигнала рассмотрена в ряде описаний к изобретениям по патентам, ранее полученным предприятием-заявителем (например, RU №2228861, В 60 R 25/00, G 08 В 25/08).
Одновременно с излучением hopping-сигнала активируется канал передачи тревожных сообщений по стандартной сотовой сети подвижной связи - по GSM-сети. Для этого в контроллере 4 тревожные извещения преобразуются в формат стандартной сотовой сети подвижной связи, например в SMS-сообщения, и через первый передающий радиомодуль 7 излучаются в эфир.
Hopping-сигнал, переданный абонентским комплектом 1, принимается территориально разнесенными пеленгаторами-ретрансляторами 8 hopping-сигнала (фиг.3), являющимися узлами ретрансляционной сети 5.
Hopping-сигнал поступает в пеленгаторе-ретрансляторе 8 hopping-сигнала на первый 9 и второй 10 приемники, антенны которых разнесены на установленное для данного пеленгатора-ретранслятора 8 hopping-сигнала расстояние. Первый 9 и второй 10 приемники используют один и тот же гетеродин 11. Вследствие этого, в первом 9 и во втором 10 приемниках осуществляется строго одинаковый сдвиг частоты входного сигнала. Далее на выходе первого 9 и второго 10 приемников сигналы преобразуются в форму цифровых выборок. Цифровые выборки с выхода первого приемника 9 поступают на первый цифровой фильтр 12, а цифровые выборки с выхода второго приемника 10 поступают на второй цифровой фильтр 13. Первый 12 и второй 13 цифровые фильтры (выполненные, например, на основе быстрого преобразования Фурье) синхронизируются одними и теми же сигналами, вырабатываемыми вычислителем-синхронизатором 14. В первом 12 и во втором 13 цифровых фильтрах происходит выделение входных сигналов в одних и тех же узких диапазонах частот. Протяженность каждого из этих узких диапазонов частот существенно уже, чем отличие частоты передачи логических единиц от частоты передачи логических нулей, которые использует передатчик 6 hopping-сигнала. Таким образом, сигналы логического нуля попадают в один из узких диапазонов частот, а сигналы логической единицы - в другой узкий диапазон частот. Количество узких диапазонов частот между этими двумя узкими диапазонами частот строго постоянно и зависит как от ширины каждого из узких диапазонов частот, так и от величины отличия частоты передачи логических единиц от частоты передачи логических нулей.
Сигналы по всем узким диапазонам частот поступают из первого цифрового фильтра 12 на соответствующие входы первого вычислителя 15. Аналогично сигналы по всем узким диапазонам частот поступают из второго цифрового фильтра 13 на соответствующие входы второго вычислителя 16. Первый 15 и второй 16 вычислители выделяют сигналы на двух узких диапазонах частот (сигнал передачи логического нуля в тревожном сообщении и сигнал передачи логической единицы в тревожном сообщении), приводят их к стандартной величине амплитуды и по сигналам вычислителя-синхронизатора 14 одновременно передают в вычислитель-синхронизатор 14.
Таким образом, в вычислитель-синхронизатор 14 одновременно поступают два сигнала с одной и той же амплитудой и частотой. Эти сигналы отличаются только по фазе. Гетеродин 11 у первого 9 и у второго 10 приемников общий, а синхронизация для первого 12 и второго 13 цифровых фильтров и для первого 15 и второго 16 вычислителей единая. Поэтому источником отличия сигналов по фазе может быть только то, что расстояние от передатчика 6 hopping-сигнала до антенны первого приемника 9 не равно расстоянию от передатчика 6 hopping-сигнала до антенны второго приемника 10. Вообще говоря, геометрическим местом точек, разность расстояний от каждой из которых до двух опорных точек постоянна, является гипербола. Однако, если расстояние от каждой из антенн до передатчика 6 hopping-сигнала существенно больше, чем расстояние между антеннами, то можно считать, что в треугольнике, углы которого составляют антенна передатчика 6 hopping-сигнала и антенны первого 9 и второго 10 приемников, один из углов (для антенны передатчика 6 hopping-сигнала) близок к нулю. Для этого случая можно ввести понятие пеленга, как угла Ψ, вершиной которого является середина прямой, соединяющей антенны первого 9 и второго 10 приемников, а сторонами - перпендикуляр к этой прямой и прямая линия, соединяющая вершину с антенной передатчика 6 hopping-сигнала. Тогда разность расстояний от антенны передатчика 6 hopping-сигнала до каждой из антенн первого 9 и второго 10 приемника равна А sin(Ψ), где А - расстояние между антеннами первого 9 и второго 10 приемника. Время Т, которое необходимо радиоволнам для прохождения этой разности расстояний равно A sin(Ψ)/С, где С - скорость распространения радиоволн.
С другой стороны, для вычислителя-синхронизатора 14 время Т является той частью периода сигнала, за которую произошло изменение фазы сигналов, фиксируемое во временных диаграммах сигналов, поступающих в вычислитель-синхронизатор 14 с выходов соответственно первого 15 и второго 16 вычислителей. Вычислитель-синхронизатор 14 замеряет это время Т с точностью, которую позволяет обеспечить его программа работы, а затем вычисляет пеленг Ψ, используя соотношение:
sin(Ψ)=(TC)/A
Если расположение антенн первого 9 и второго 10 приемников привязано по географическим сторонам света, то пеленг также указывает направление, привязанное к географическим сторонам света.
Вычислитель-синхронизатор 14 определяет значения всех разрядов в тревожном сообщении и дополняет тревожное сообщение значением величины пеленга и координатами данного пеленгатора-ретранслятора 8 hopping-сигнала. Таким образом, вычислитель-синхронизатор 14 формирует ретранслируемое тревожное сообщение.
Через второй передающий радиомодуль 17 и/или через первый модем 18 ретранслируемое тревожное сообщение передается, соответственно, по GSM-сети и/или по проводной телефонной сети в приемопередающий радиомодуль 19 и/или во второй модем 20, установленные в центре 21 обработки информации. Из приемопередающего радиомодуля 19 и/или из второго модема 20 соответствующие кодовые посылки ретранслируемого тревожного сообщения передаются в пультовое оконечное устройство 22 центра 21 обработки информации.
Принятые пультовым оконечным устройством 22 кодовые посылки передаются в ПЦН 23. В ПЦН 23 из принятых кодовых посылок селектируется информация, содержащая идентификационные признаки охраняемого ТС, а также пеленг на источник излучения и координаты данного пеленгатора-ретранслятора 8 hopping-сигнала. Таким же путем осуществляется прием информации и от других пеленгаторов-ретрансляторов 8 hopping-сигнала.
Далее, вся эта информация подается из ПЦН 23 на вход блока 24 вторичной обработки и сопровождения для представления в виде, наглядном и удобном для оператора центра 21 обработки информации. В этом удобном для оператора виде информация отображается в блоке 25 принятия решений.
Оператор центра 21 обработки информации должен связаться по контактному номеру телефона с пользователем охраняемого ТС и сообщить ему о факте получения в центре 21 обработки информации соответствующего ретранслируемого тревожного сообщения. Пользователь имеет право сделать заявление о том, что факт получения ретранслируемого тревожного сообщения означает угон охраняемого ТС. После такого заявления пользователя охраняемое ТС получает статус УТС, для которого необходимо проводить операцию сопровождения и последующего захвата.
Для сопровождения УТС могут быть использованы известные в теории радиолокации алгоритмы сопровождения движущихся целей (например, "Справочник по радиолокации" под редакцией М.Сколника, том 4, Москва, "Советское Радио", 1978).
Рассмотрим вначале процедуру обработки указанной информации в случае отсутствия преднамеренных помех работе GPS-приемника.
В случае угона местоположение УТС изменяется со временем, что фиксируется GPS-приемником, входящим в состав блока 26 автономной навигации, расположенным в абонентском комплекте 1 на УТС. Из блока 26 автономной навигации данные о текущем местоположении УТС, полученные GPS-приемником, поступают в контроллер 4, входящий в состав установки 3 охранной сигнализации. После этого контроллер 4 "вписывает" данные о текущем местоположении УТС в формат тревожных сообщений, передаваемых в центр 21 обработки информации с помощью передатчика 6 hopping-сигнала и/или с помощью первого передающего радиомодуля 7, соответственно, по ретрансляционной сети 5 и/или по сотовой сети подвижной связи.
При использовании в качестве сотовой сети подвижной связи стандартной GSM-сети указанные тревожные сообщения, содержащие данные глобальной спутниковой навигации, как правило, передаются в виде SMS-сообщений. Может использоваться также режим пакетной передачи данных - GPRS.
В соответствии с полученными тревожными сообщениями в блоке 24 вторичной обработки и сопровождения, входящем в состав центра 21 обработки информации, формируется запрос на вызов хранящихся в его памяти картографических данных соответствующего участка цифровой модели улично-дорожной сети. Вызванная информация преобразуется в требуемый для блока 25 принятия решений формат и отображается в соответствии с выбранной технологией географических систем (ГИС), как это делается, например, в радиоканальной системе мониторинга и сопровождения ТС по ранее полученному патенту RU №2240938, В 60 R 25/00, G 08 В 25/10.
Результатом такого отображения является наглядное представление на экране монитора, входящего в состав блока 25 принятия решений, отметок УТС на фоне карты-схемы улично-дорожной сети обслуживаемого района в обрамлении соответствующей текстовой информации (например, указываются: государственный номер, цвет и марка УТС, его географические координаты, фамилия и телефон владельца и т.п.). Одновременно система может сопровождать несколько УТС.
Область нахождения УТС отображается окружностью с центром, находящимся в точке с координатами, измеренными блоком 26 автономной навигации, и с радиусом микросоты GPS-приемника (фиг.5), определяемым ошибкой измерений GPS-приемника, входящего в состав блока 26 автономной навигации. При движении УТС по дороге, местоположение данной микросоты на карте-схеме смещается, в соответствии с измерениями GPS-приемника. Дополнительную информацию для повышения точности определения местонахождении УТС и для его устойчивого сопровождения дает модель улично-дорожной сети в виде набора линейных сегментов и узлов, а также использование в блоке 24 вторичной обработки и сопровождения оптимальной, например калмановской фильтрации (например, патент US №2002/0193944, G 01 C 21/26). Поперечная составляющая ошибки определения местоположения УТС, как правило, не превышает в этом случае ширины полотна дороги, то есть нескольких метров.
Решения навигационных уравнений в блоке 26 автономной навигации производятся с частотой получения спутниковых радионавигационных данных, как правило, один или два раза в секунду.
В качестве примера практической реализации вышеуказанного метода сопровождения УТС можно привести вышеупомянутую систему TRACER. Указанная система служит для комплексного решения различных задач, связанных с охраной, навигацией и отслеживанием местоположения охраняемого ТС с использованием электронных карт местности. Для определения плоскостных координат и скорости движения охраняемого ТС используется спутниковая навигационная система, а для передачи тревожных сообщений и навигационных данных - сотовая коммерческая сеть подвижной связи. Принимая радионавигационные сигналы на GPS-приемник не менее чем от трех спутников, установленный на охраняемом ТС блок 26 автономной навигации вычисляет плоскостные координаты охраняемого ТС, которые накладываются на оцифрованную электронную карту местности. Указанная карта с изображением отметок, сопровождающих охраняемое ТС, передается через первый передающий радиомодуль 7 по стандартной сотовой сети подвижной связи в центр 21 обработки информации. Слежение за текущим местоположением охраняемого ТС осуществляется с использованием сглаживающего фильтра. Причем это может происходить как в реальном времени, так и спустя любой временной отрезок, поскольку предусмотрена возможность регистрации маршрута движения охраняемого ТС. В качестве первого передающего радиомодуля 7 может использоваться обычный сотовый телефон.
В рассматриваемой системе на указанную микросоту накладывается радиопеленгационный луч (фиг.5), ширина которого зависит от точностных характеристик измерения сдвига фаз сигналов в пеленгаторе-ретрансляторе 8 hopping-сигнала. Однако в рассматриваемом случае данные пеленгации УТС избыточны и могут быть использованы лишь для повышения устойчивости сопровождения УТС.
Входящий в состав центра 21 обработки информации блок 25 принятия решений анализирует информацию, получаемую с выхода блока 24 вторичной обработки и сопровождения. Анализ осуществляется при использовании оператором центра 21 обработки информации монитора, входящего в состав блока 25 принятия решений. Оператор центра 21 обработки информации наблюдает изображение на экране монитора, анализирует выводимую на него текущую информацию и принимает адекватные решения.
При первом появлении на экране монитора отметки охраняемого ТС и идентификации этого объекта оператор оповещает с помощью телефонной сети пользователей этого охраняемого ТС о возможном угоне (краже).
При этом используются любые доступные в данный момент внешние телефонные сети:
- GSM-сеть, связь по которой осуществляется с помощью приемопередающего радиомодуля 19, роль которого может выполнять обычный сотовый телефон;
- обычная телефонная сеть фиксированной связи.
После получения от пользователя охраняемого ТС подтверждения факта угона оператор центра 21 обработки информации оповещает об этом силы быстрого реагирования, например дежурную часть милиции, и передает туда информацию о местоположении УТС - "первичное целеуказание". Слежение за УТС по экрану монитора после этого продолжается, но дальнейшие действия по перехвату УТС не рассматриваются, поскольку выходят за рамки настоящего изобретения.
При "глушении" злоумышленниками GPS-приемника путем постановки преднамеренной помехи его работе, текущее местоположение охраняемого ТС (или УТС) уже не удается локализовать с помощью микросоты GPS-приемника. В этом случае для определения текущего местоположения УТС в качестве основных измеренных параметров используются пеленги, получаемые от нескольких территориально разнесенных пеленгаторов-ретрансляторов 8 hopping-сигнала (фиг.5). Область пересечения их радиопеленгационных лучей определяет местоположение УТС. Как видно из фиг.5, требуются пеленги, как минимум, от двух пеленгаторов-ретрансляторов 8 hopping-сигнала. Ошибка измерения пеленга определяется точностными характеристиками данного пеленгатора-ретранслятора 8 hopping-сигнала и, соответственно, устанавливает ширину радиопеленгационного луча, условно изображенную на фиг.5. Расчеты координат УТС производятся в блоке 24 вторичной обработки и сопровождения по известным алгоритмам триангуляции (приведенным, например, в "Справочнике геодезиста", книга 2, Москва, "Недра", 1985). Как и в рассмотренном выше случае, местоположение охраняемого ТС (или местоположение УТС) уточняется с помощью модели улично-дорожной сети. Поэтому результирующая точность определения местоположения охраняемого ТС (или УТС) в условиях применения злоумышленниками преднамеренных помех оказывается примерно такой же, как и в беспомеховой обстановке.
"Глушение" злоумышленниками GSM-каналов, обеспечивающих передачу ретранслированных тревожных сообщений от пеленгаторов-ретрансляторов 8 hopping-сигнала в центр 21 обработки информации, вряд ли возможно. Для этого потребовалась бы хорошо спланированная и скоординированная операция с использованием несколько территориально-распределенных источников заградительных помех, что равносильно боевым действиям.
Кроме того, для снижения вероятности потери ретранслированных тревожных сообщений используется возможность передачи ретранслированных тревожных сообщений по телефонной сети.
Таким образом, помехозащищенность и точность определения координат охраняемых ТС, а также УТС, в рассмотренной системе остаются примерно такими же, как и в системе-прототипе, но достигается это при значительно меньшей требуемой мощности излучения с борта охраняемого ТС (или УТС). Это новое качество и определяет возможность решения поставленной задачи - обеспечения практической возможности обнаружения, определения местоположения и сопровождения охраняемых ТС или УТС при достаточно малых - удовлетворяющих требованиям директивных документов - значениях мощности излучения с борта охраняемого ТС или УТС (не более 5 мВт). Причем работоспособность системы сохраняется и в условиях применения злоумышленниками как преднамеренных помех работе GPS-приемника, так и преднамеренных помех передаче сигналов по GSM-сети.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2258618C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| ОХРАННАЯ СИГНАЛИЗАЦИЯ, ОБОРУДОВАННАЯ МОДУЛЕМ МОБИЛЬНОЙ СВЯЗИ С ТЕРМИНАЛОМ ПОЛЬЗОВАТЕЛЯ | 2009 |
|
RU2413639C1 |
| РАДИОСИГНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, ОБЪЕКТОВ НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2231458C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗВЕЩЕНИЙ ПРИ ОХРАНЕ ГРУППЫ ОБЪЕКТОВ | 2004 |
|
RU2265250C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА МОНИТОРИНГА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2240938C1 |
| СИСТЕМА ОХРАНЫ И ПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2349962C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2002 |
|
RU2201363C1 |
Изобретение относится к системам охранной сигнализации и мониторинга транспортных средств (ТС) и может быть использовано для поиска и обнаружения ТС, а также для определения местоположения и сопровождения угнанных ТС. Система содержит ретрансляционную сеть, состоящую из N территориально-распределенных ретрансляционных узлов, которые выполнены с возможностью соединения по телефонной сети и/или по стандартной сотовой сети подвижной связи, например GSM-сети, с центром обработки информации. На ТС установлены абонентские комплекты, каждый из которых содержит установку охранной сигнализации, выполненную с возможностью передачи данных по стандартной сотовой сети подвижной связи, а также блок автономной навигации, выполненный с возможностью приема и обработки сигналов глобальной спутниковой системы навигации, например GPS, и подключенный выходом ко входу установки охранной сигнализации. При этом каждый из абонентских комплектов содержит передатчик hopping-сигнала, управляющий вход которого подключен к выходу установки охранной сигнализации, а каждый из N ретрансляционных узлов выполнен в виде пеленгатора-ретранслятора hopping-сигнала, содержащего два приемника с общим гетеродином и разнесенными на установленное расстояние идентичными антеннами, два цифровых фильтра, два вычислителя, вычислитель-синхронизатор, передающий радиомодуль и модем. Информационный выход вычислителя-синхронизатора через модем подключен к телефонной сети, а через передающий радиомодуль - к стандартной сотовой сети подвижной связи. Предложенная система позволяет обнаруживать, определять местоположение и надежно сопровождать угнанное ТС при достаточно малых мощностях излучения с борта ТС. При этом работоспособность системы сохраняется в условиях применения злоумышленниками преднамеренных помех GPS-приемнику и каналам стандартных сотовых сетей подвижной связи. 2 з.п. ф-лы, 5 ил.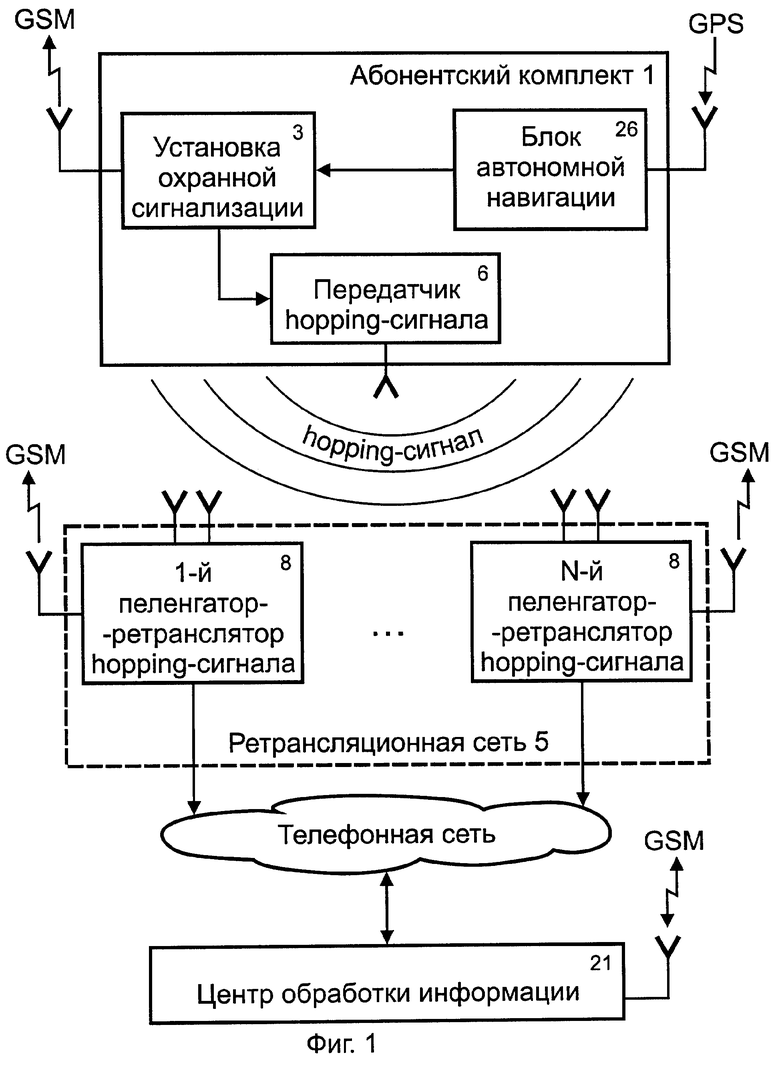
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ СОПРОВОЖДЕНИЯ, МОНИТОРИНГА И ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2220859C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2002 |
|
RU2201363C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2002 |
|
RU2198800C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ, НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2001 |
|
RU2182088C1 |

