Изобретение относится к радиоэлектронным системам для охраны подвижных объектов (типа человек, автомобиль) и объектов недвижимости (типа квартира, гараж, офис и т.п.) и предназначено для применения в регионах, покрытых радиотелефонными и пейджерными сетями связи.
Известна американская радиопоисковая система LO/JACK, предназначенная для обнаружения и поиска похищенных транспортных средств (ТС), эксплуатируемая в г. Москве с 1996 года (см., например. Рекламные материалы ЗАО "Мосвнешинформ", руководство по эксплуатации, Москва, 1998 г.). В состав этой системы входят следующие основные узлы:
приемоответчик (VLU), скрытно устанавливаемый на автомобиле;
несколько территориально разнесенных базисных станций, содержащих передатчик включения (VAT) и устанавливаемую на вышке антенну;
центральную компьютерную станцию (VAC) с базой данных, расположенную в центре оперативного реагирования;
устанавливаемый на милицейских автомобилях преследования трекер (VTC) - автомобильный компьютер слежения, включающий в себя четырехэлементную пеленгационную антенну с блоками обработки и отображения информации о дальности и пеленге приемоответчика VLU, находящегося на разыскиваемом автомобиле.
При установлении владельцем факта кражи или угона его автомобиля он обращается с заявлением (письменно или по телефону) в центр оперативного реагирования системы LO/JACK или в дежурную часть милиции. Оператор системы активирует установленный на автомобиле приемоответчик VLU путем посылки ему кодового сообщения с установленной на вышке антенне передатчика включения VAT. Приемоответчик VLU включается и начинает посылать сигнал, по которому можно запеленговать украденный (угнанный) автомобиль с милицейских автомобилей преследования, оснащенных трекерами VTC. Центральная компьютерная станция VAC связывается с передатчиками включения VAT по телефонным каналам (через модемы).
После того, как какой-либо из трекеров VTC обнаруживает и пеленгует работающий приемоответчик VLU, начинается операция по преследованию и перехвату угнанного ТС (УТС) ("капкан"). В ней участвуют несколько оборудованных трекерами VTC патрульных автомобилей специализированного подразделения милиции - отдельного батальона дорожно-патрульной службы Управления Государственной инспекции безопасности дорожного движения (УГИБДД). Трекеры VTC пеленгуют источник излучения. Руководствуясь их показаниями и сведениями, получаемыми с помощью штатных радиостанций от других экипажей, патрульные автомобили преследования постепенно стягивают кольцо захвата УТС.
В ряде применений аппаратура LO/JACK используется в комплекте с другими электронными системами защиты автомобиля, препятствующими несанкционированному доступу в него, например, с автомобильной охранной системой REEF NET R-405 (см. Техническую информацию "Автомобильные охранные системы", "Геолинк- Электроникс", М., 1999/2000). В состав этих систем входят: комплект охранных датчиков, установленных в выбранных местах автомобиля, связанный с ними радиопередатчик пейджера, транспондерная карточка и индивидуальный приемник владельца.
При попытках несанкционированного проникновения внутрь автомобиля и кражи его отдельных частей происходит срабатывание соответствующего охранного датчика, включающего радиопередатчик пейджера, который начинает излучать через бортовую антенну сигналы тревоги (СТ) в виде кодированных радиоимпульсов, содержащих информацию об идентификационных признаках автомобиля. Находящийся у владельца индивидуальный приемник принимает эти сигналы и индицирует сигналы тревоги. Владелец получает возможность предпринять необходимые меры, в частности позвонить по "02", обратиться с заявлением в ближайшую дежурную часть милиции либо в центр оперативного реагирования системы LO/JACK для активации этой системы и использования милицейских автомобилей, оснащенных трекерами VTC системы LO/JACK, для поиска, остановки и возврата УТС.
Недостатками известного способа радиоэлектронной охраны объектов с использованием вышеуказанных систем являются:
1. Отсутствие начального "целеуказания" в момент начала поиска УТС-определение местоположения УТС осуществляется только с милицейских автомобилей в процессе поиска ими объекта. Это заставляет милицию содержать для указанной цели специализированное подразделение, неся при этом значительные эксплуатационные расходы, в то время как основные силы и средства милиции, базирующихся в дежурных частях (ДЧ), практически лишены возможности участвовать в операции по поиску и перехвату УТС.
2. Необходимость перехвата УТС в движении, что таит угрозу безопасности участникам дорожного движения и создает серьезные трудности правового характера в случае дорожно-транспортного происшествия (ДТП).
На устранение указанных недостатков направлено изобретение "Способ определения координат подвижных объектов и устройство для его осуществления" по патенту Российской Федерации N 2106694, кл. G 08 B 25/00 от 01.08.95 г., выбранное в качестве прототипа.
Согласно этому изобретению, с помощью стационарных сигнализаторов, установленных на сооружениях городской инфраструктуры с известными географическими координатами, излучают кодовые посылки, несущие информацию о категории посылки, выраженной тестом, информационным сообщением или сигналом тревоги, и информацию о местоположении указанных сооружений, а с помощью абонентских сигнализаторов, установленных на подвижных (например УТС) или неподвижных охраняемых объектах, излучают кодовые посылки, несущие информацию о категории сообщения, коды идентификационных признаков подвижных и неподвижных объектов и коды принадлежности их соответствующим владельцам, принимают эти кодовые посылки на территориально разнесенных базисных станциях, осуществляют их предварительную обработку и передают в цифровом виде на центральную станцию, где с помощью первичной цифровой обработки определяют категорию принятого сообщения, идентификационные признаки объекта и географические координаты сигнализатора, излучающего данную кодовую посылку, а также расстояния от абонентского сигнализатора до ближайших к нему базисных станций, после чего формируют и передают на базисные станции, стационарные сигнализаторы и абонентские сигнализаторы, установленные на подвижных и неподвижных охраняемых объектах, ответные тестовые сообщения, подтверждающие факт взятия данного объекта под охрану, а в случае несанкционированного воздействия на какой-либо из оборудованных абонентскими сигнализаторами подвижный или неподвижный объект и обнаружения в его кодовой посылке сигнала тревоги передают тревожное оповещение по пейджерной сети связи на индивидуальный приемник владельца и на приемник абонентского сигнализатора, установленного на принадлежащем этому владельцу подвижном или неподвижном объекте, при этом часть стационарных сигнализаторов используют в качестве базисных станций. При этом в способе-прототипе используют разностно-дальномерный метод определения координат подвижного объекта (см., например, "Справочник геодезиста", кн. 2, М. , "Недра", 1985 г.).
В случае несанкционированного воздействия на какой-либо из оборудованных абонентским сигнализатором подвижный объект, сопровождающегося срабатыванием этого сигнализатора и излучением вышеуказанных кодовых посылок, содержащих сигнал тревоги, и обнаружения этого сигнала при цифровой обработке на центральной станции, передают тревожное сообщение с центральной станции на индивидуальный приемник владельца, используя для этого пейджерную сеть. Часть стационарных сигнализаторов может быть использована в качестве базисных станций с возможностью приема и ретрансляции кодовых посылок, излучаемых абонентским сигнализатором с подвижного объекта, и с возможностью измерений дальностей до него со стационарных сигнализаторов и/или базисных станций. При этом абонентский сигнализатор может быть выполнен с возможностью кодированного набора пейджерного сообщения.
Совокупность указанных признаков прототипа позволяет локализовать подвижный объект в момент его обнаружения, тем самым существенно упростить и сделать более целенаправленной процедуру дальнейшего его поиска и перехвата силами оперативного реагирования.
Однако данная совокупность признаков не позволяет устранить второй из вышеуказанных недостатков, заключающийся в необходимости перехвата УТС в движении, что грозит безопасности других участников дорожного движения. Кроме того, получаемая на практике точность разностно-дальномерного метода определения местоположения подвижного объекта в реальных условиях городской застройки оказывается значительно ниже расчетной. Основной причиной ухудшения точности является влияние переотражений от домов и затенения объекта листвой деревьев. Кроме того, инструментальная точность разностно-дальномерных измерений принципиально зависит от "геометрического фактора", т.е. от относительного положения объекта и базисных станций. Все это снижает надежность измерений и делает их результаты зависимыми от местоположения объекта относительно сооружений городской инфраструктуры.
Вследствие этого, увеличивается время поиска объекта патрульными машинами милиции, а в некоторых зонах перехват подвижного объекта становится практически невозможным.
Другим недостатком прототипа является высокая вероятность ложной тревоги, которая может быть вызвана включением абонентского сигнализатора в случаях, не связанных с несанкционированным воздействием на охраняемый подвижный объект, в том числе, спровоцированных самими угонщиками.
Заявляемое изобретение, принципиально охватывающее охрану как подвижных, так и неподвижных объектов, направлено на устранение указанных недостатков прототипа, а именно на решение задачи повышения вероятности обнаружения подвижного объекта, подвергшегося несанкционированному воздействию со стороны злоумышленников, уменьшение вероятности ложной тревоги и сокращение времени, затрачиваемого силами оперативного реагирования на поиск и задержание этого объекта в городских условиях.
При реализации изобретения могут быть получены следующие технические результаты:
снижение степени зависимости точности определения координат подвижного объекта от его расположения относительно сооружений городской инфраструктуры (домов, построек), зеленых массивов и базисных станций;
сокращение времени, необходимого для поиска УТС, и уменьшение риска возникновения дорожно-транспортного происшествия во время задержания объекта.
Для воплощения изобретательского замысла взаимосвязанно используются следующие технические решения:
1. Применение двухэтапной процедуры определения местоположения ТС: вначале сотового метода измерения координат для сужения начальной зоны поиска УТС и затем пеленгационного способа уточнения координат УТС, с помощью мобильных нарядов оперативного реагирования, оснащенных пеленгационными приемниками.
2. Передача тревожного сигнала по пейджерной сети связи не только владельцу ТС для предупреждения его о несанкционированном воздействии на его ТС, но и на борт ТС для блокирования его движения. В этом случае милиции не нужно преследовать и осуществлять захват ТС в движении. Соответственно, ускоряется поиск объекта и снижается риск возникновения ДТП.
3. Использование владельцем транспондерных карточек, что позволяет персонифицировать действия владельца и, благодаря этому, уменьшить вероятность ложной тревоги.
Поставленная задача решается тем, что в известном способе комплексной охраны подвижных и неподвижных объектов, при котором с помощью стационарных сигнализаторов, установленных на сооружениях городской инфраструктуры с известными географическими координатами, излучают кодовые посылки, несущие информацию о категории посылки, выраженной тестом, информационным сообщением или сигналом тревоги, и информацию о местоположении указанных сооружений, а с помощью абонентских сигнализаторов, установленных на подвижных или неподвижных охраняемых объектах, излучают кодовые посылки, несущие информацию о категории сообщения, коды идентификационных признаков подвижных и неподвижных объектов и коды принадлежности их соответствующим владельцам, принимают эти кодовые посылки на территориально разнесенных базисных станциях, осуществляют их предварительную обработку и передают в цифровом виде на центральную станцию, где с помощью первичной цифровой обработки определяют категорию принятого сообщения, идентификационные признаки объекта и географические координаты сигнализатора, излучающего данную кодовую посылку, а также расстояния от абонентского сигнализатора до ближайших к нему базисных станций, после чего формируют и передают на базисные станции, стационарные сигнализаторы и абонентские сигнализаторы, установленные на подвижных и неподвижных охраняемых объектах, ответные тестовые сообщения, подтверждающие факт взятия данного объекта под охрану, а в случае несанкционированного воздействия на какой-либо из оборудованных абонентскими сигнализаторами подвижный или неподвижный объект и обнаружения в его кодовой посылке сигнала тревоги передают тревожное оповещение по пейджерной сети связи на индивидуальный приемник владельца и на приемник абонентского сигнализатора, установленного на принадлежащем этому владельцу подвижном или неподвижном объекте, при этом часть стационарных сигнализаторов используют в качестве базисных станций, - при охране подвижных объектов одновременно с измерениями расстояний между абонентским сигнализатором и ближайшими к нему стационарными сигнализаторами или базисными станциями пеленгуют подвижный объект ближайшими к нему стационарными сигнализаторами или базисными станциями и определяют его полярные координаты относительно этих стационарных сигнализаторов или базисных станций, на центральной станции осуществляют дополнительную цифровую обработку первично обработанных кодовых посылок с использованием условно постоянной информации о местности, о расположении на ней различных городских сооружений и о транспортных потоках на улично-дорожной сети, получаемой от внешних информационных источников, определяют местоположение подвижного объекта на местности при дополнительной цифровой обработке в центральной станции по совокупности данных о географических координатах ближайших к нему стационарных сигнализаторов или базисных станций и значений полярных координат подвижного объекта относительно этих стационарных сигнализаторов или базисных станций, одновременно с передачей тревожного оповещения владельцу подвижного объекта, абонентский сигнализатор которого передал сигнал тревоги, активируют по пейджерной сети связи установленный на этом объекте иммобилайзер и блокируют с его помощью движение подвижного объекта, а после получения от его владельца подтверждения факта несанкционированного воздействия на принадлежащий ему подвижный объект формируют на центральной станции и передают по проводным или беспроводным каналам связи в ближайший к данному объекту центр оперативного реагирования голосовое сообщение и цифровые данные, несущие информацию о категории сигнала тревоги, идентификационных признаках объекта, местоположении данного объекта на местности и сведения о владельце, а в процессе реагирования на факт несанкционированного воздействия определяют с помощью носимых или возимых пеленгационных устройств, размещенных на подвижных средствах оперативного реагирования, полярные координаты данного объекта относительно носимых или возимых пеленгационных устройств и с их помощью уточняют ранее переданные с центральной станции данные о местоположении объекта на местности, при этом владельца охраняемого подвижного объекта снабжают одной или несколькими транспондерными карточками, на поверхности которых нанесены защищенные специальным покрытием одноразового применения, например краской, секретные коды, становящиеся визуально доступными только при стирании защитного покрытия с соответствующих полей транспондерной карточки, а в цифровой памяти транспондерной карточки зафиксирован идентификационный код владельца, считывают идентификационный код с помощью установленного на подвижном объекте узла управления иммобилайзером при внесении транспондерной карточки в специальную зону для дистанционного считывания, сравнивают считанный код с каждым идентификационным кодом, хранящимся в том же узле правления иммобилайзером, и при их совпадении деактивируют иммобилайзер с последующим разблокированием движения подвижного объекта.
На чертеже представлена функциональная схема комплексной системы охраны подвижных и неподвижных объектов, в которой реализуется заявляемый способ.
В систему входят абонентский сигнализатор 1, установленный на подвижном объекте, и подключенный к системе охранных датчиков, сотовая сеть 2 стационарных сигнализаторов, узлами которой являются стационарные сигнализаторы 2', установленные в точках с известными координатами и выполненные с возможностью приема и ретрансляции кодовых посылок, излучаемых абонентским сигнализатором 1 с подвижного объекта, и с возможностью измерения дальностей и пеленгов подвижного объекта с ближайших к нему стационарных сигнализаторов 2', сотовая сеть 3 базисных станций, образованная территориально разнесенными базисными станциями 3', на каждой из которых предварительно обрабатываются кодовые посылки, принятые от стационарных сигнализаторов 2 и от абонентских сигнализаторов 1, установленных на подвижных объектах.
Часть стационарных сигнализаторов 2' может быть использована в качестве базисных станций 3'.
В систему входят также центральная станция 4, содержащая последовательно соединенные блок 5 приема кодовых посылок (подключенный к базисным станциям 3'), и блок 6 обработки, регистрации и отображения, к выходам которого подключены передатчик 7 ответных тестовых сообщений (передающий тестовые сообщения в сотовую сеть 3 базисных станций), формирователь 8 тревожного оповещения владельца (соединенный через пейджинговую 9 сеть связи или через сеть 11 голосовой связи, соответственно, с индивидуальным пейджерным приемником 10 владельца или с телефонным аппаратом владельца) и блок вторичной обработки 12, включающий в свой состав блок 13 определения координат. Владелец может находиться как на подвижном объекте, так и вне его. Пейджерная сеть связи 9 связана с сетью 11 голосовой связи, в качестве которой могут использоваться городская телефонная сеть, сотовая или транкинговая радиотелефонные сети связи.
Второй вход блока 12 вторичной обработки связан с выходом блока 14 приема и обработки сообщений от внешних информационных источников, к которому подключены внешние информационные источники 15 (центр организации дорожного движения, центр телеавтоматического управления дорожным транспортом, городская информационно-справочная система и другие аналогичные структуры).
Выход блока 12 вторичной обработки подключен к блоку 17 передачи информационных сообщений в службу оперативного реагирования, второй выход блока 14 приема и обработки сообщений от внешних информационных источников соединен со вторым входом блока 17 передачи информационных сообщений в службу оперативного реагирования. Выход блока 17 подключен к территориально распределенным центрам 19 оперативного реагирования, входящим в сети 18 территориально распределенных центров оперативного реагирования. В качестве центров 19 оперативного реагирования могут, например, использоваться дежурные части (ДЧ) органов внутренних дел и/или ДЧ частных охранных предприятий, распределенных по территории города (региона). В состав службы оперативного реагирования входят также подвижные средства оперативного реагирования, связанные с центрами 19 оперативного реагирования штатными средствами радиосвязи и оснащенные носимыми или возимыми пеленгационными устройствами 20, предназначенными для определения полярных координат подвижного объекта, излучающего сигналы тревоги, относительно точек нахождения носимых или возимых пеленгационных устройств 20, установленных, как правило, на подвижных средствах оперативного реагирования.
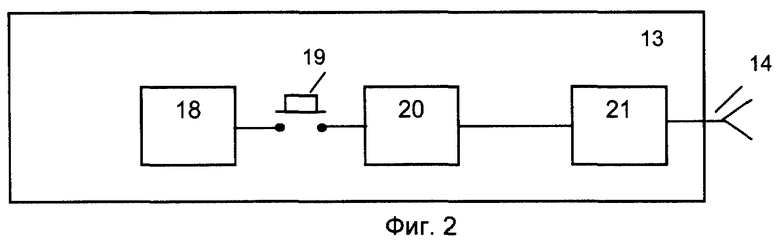
На каждом подвижном или неподвижном объекте, обслуживаемом системой, установлен абонентский приемник 21, вход которого подключен к пейджерной сети связи 9, первый выход через блок запуска 22 абонентского сигнализатора - к управляющему входу абонентского сигнализатора 1, а второй выход - к узлу 23 управления иммобилайзером. Выход узла 23 управления иммобилайзером подключен к индикатору 24 режима работы. Владелец подвижного объекта оснащен транспондерной карточкой (ТК) 25, в цифровой памяти которой зафиксирован идентификационный код, считываемый в узел 23 управления иммобилайзером при облучении ТК электромагнитным сигналом после внесения последней в специальную зону дистанционного считывания, формируемую диаграммой излучения антенны узла 23 управления иммобилайзером.
Рассматриваемый вариант системы, реализующей заявленный способ комплексной охраны подвижных и неподвижных объектов, работает следующим образом.
Абонентский сигнализатор 1, установленный на принадлежащем владельцу подвижном или неподвижном объекте, например на его автомобиле, периодически излучает кодовые посылки, несущие информацию о категории сообщения (тест, "информационное сообщение", сигнал тревоги), код идентификационных признаков объекта (марка, цвет, государственный номер и т.п.) и код принадлежности соответствующему владельцу.
Стационарные сигнализаторы 2', установленные на местности и городских сооружениях в точках с известными координатами, выполняют роль ретрансляторов этих посылок, пересылая их через сотовую сеть 3 базисных станций на центральную станцию 4. Часть стационарных сигнализаторов 2' может быть использована в качестве базисных станций 3'.
Платформой для установки стационарного сигнализатора 2' может служить элемент улично-дорожной инфраструктуры, например, фонарный столб, светофор, крыша здания, объект недвижимого имущества владельца объекта охраны, например окно его квартиры, офиса, крыша гаража или коттеджа и пр.
В последнем случае стационарный сигнализатор 2' выполняет те же функции, что и абонентский сигнализатор 1, установленный на подвижном объекте и подключенный к его охранным датчикам, за исключением того, что в излучаемую им кодовую посылку дополнительно вводится код известного местоположения объекта недвижимости, на котором установлен этот стационарный сигнализатор 2'.
В любом случае стационарный сигнализатор 2' выполняет роль узла микросотовой сети передачи данных (МСПД). Зона действия МСПД определяется размерами территории города или другого территориального образования, взятого под охрану.
В таких больших городах, как Москва, Санкт-Петербург и т.п., для доведения информации, передаваемой абонентскими 1 и стационарными 2' сигнализаторами, до центральной станции 4, необходима сотовая сеть 3 базисных станций, узлами которой являются базисные станции 3'. На этих базисных станциях 3' принимаемая информация подвергается предварительной обработке и преобразованию в цифровой формат, воспринимаемый блоком 5 приема кодовых посылок центральной станции 4.
Базисные станции 3' и часть стационарных сигнализаторов 2' могут быть территориально совмещены друг с другом и выполнять одни и те же функции. Это характерно, в первую очередь, для небольших городов и поселков, для покрытия территории которых достаточно нескольких единиц или десятков стационарных сигнализаторов-ретрансляторов.
Для тестирования всей МСПД базисные станции 3' периодически опрашивают узлы сотовой сети 2 стационарных сигнализаторов, а также абонентские сигнализаторы 1 и осуществляют обработку поступающих от них тестовых сообщений.
При несанкционированном воздействии на объект недвижимости (квартиру, гараж, офис) или на объект движимого имущества абонента охранной системы, например его автомобиль, снабженный охранными датчиками (герконами, детекторами разбития стекла, датчиками удара и пр.), абонентским сигнализатором 1, установленным на автомобиле, или стационарным сигнализатором 2', установленном на объекте недвижимого имущества, излучается сигнал тревоги.
Этот сигнал принимается индивидуальным приемником 10 владельца, если последний находится в зоне действия активированного сигнализатора.
Одновременно указанный сигнал по МСПД (в узлах которой находятся стационарные сигнализаторы 2' и/или базисные станции 3') передается на центральную станцию 4.
Информация с базисных станций 3' передается в центральную станцию 4 в цифровом виде по проводным (медным или волоконно-оптическим) каналам связи или по радиоэфиру (через радиомодемы).
Тип используемых каналов городских сетей связи для заявляемого изобретения несущественен.
В блоке 5 приема кодовых посылок центральной станции 4 осуществляется селекция кодовых посылок, содержащих тестовую информацию, различные виды сигналов тревоги, соответствующие, например, несанкционированному проникновению в охраняемый объект, угону ТС, разбойному нападению на владельца и пр. , а также идентификационные признаки охраняемого объекта и коды его принадлежности соответствующему владельцу.
После селекции в блоке 5 приема кодовых посылок указанная кодовая информация обрабатывается в блоке 6 обработки, регистрации и отображения. Выходные данные регистрируются в нем на магнитном носителе или в цифровой памяти и выводятся на экран монитора компьютера или отображаются на видеотабло (видеостене).
Тестовым сигналом запускается передатчик 7 ответных тестовых сообщений, который посылает на базисные станции 3', стационарные 2' и абонентские 1 сигнализаторы сигналы подтверждения работоспособности системы. В абонентских сигнализаторах 1 осуществляется индикация ответного тестового сигнала для подтверждения нахождения охраняемых объектов в зоне действия рассматриваемой системы.
При обнаружении на центральной станции 4 сигнала тревоги в принятой кодовой посылке, в формирователе 8 тревожного оповещения владельца формируется сигнал тревожного оповещения владельца объекта (неподвижного или подвижного), с которого был излучен сигнал тревоги. При этом привлекается информация из компьютерной базы данных блока 6, содержащая идентификационные признаки объекта и коды его принадлежности владельцу, а также справочные данные о владельце (телефоны по месту жительства и по месту работы, адрес электронной почты, адрес в Интернет-сети и пр.).
Через пейджерную сеть связи 9 и/или через сеть 11 голосовой связи это оповещение посылается, соответственно, на пейджерный приемник или телефонный терминал владельца.
В блоке 6 обработки, регистрации и отображения центральной станции 4 сигнал тревоги преобразуется в вид, необходимый для ввода его в геоинформационную систему (ГИС), установленную на компьютерных средствах отображения информации блока 6 обработки, регистрации и отображения.
С помощью ГИС на экран выводится электронная карта того района, в пределах которого находятся излучающие сигналы тревоги стационарные 2' либо абонентские 1 сигнализаторы.
Подвергшийся несанкционированному воздействию неподвижный объект отображается соответствующим графическим знаком. Кроме того, на экран может быть выведена также текстовая информация, характеризующая этот объект (адрес, фамилия, имя, отчество владельца, телефон и т.п.).
Местоположение подвергшегося несанкционированному воздействию подвижного объекта отображается в виде замкнутых геометрических фигур (кругов, эллипсов, прямоугольников), обозначающих зоны действия приемников, входящих в состав ближайших к нему стационарных сигнализаторов 2', принявших сигналы тревоги.
Каждая микросота позиционируется относительно точки нахождения на местности стационарного сигнализатора 2' или базисной станции 3', принявших и переизлучивших сигнал тревоги. Микросота может отображаться, например, в виде окружности, радиус которой соответствует дальности действия абонентского сигнализатора 1, установленного на борту УТС. Результаты пеленгации абонентского сигнализатора 1 с близлежащих к нему стационарных сигнализаторов 2' могут отображаться в виде секторов с вершинами в точках нахождения стационарных сигнализаторов 2' и/или базисных станций 3' с известными географическими координатами.
Определение координат абонентского сигнализатора 1, излучающего сигнал тревоги, осуществляется с участием оператора в блоке 13 определения координат, входящем в состав блока 12 вторичной обработки. Это определение может быть проведено с помощью курсора, подводимого к точке наиболее вероятного (по мнению оператора) нахождения подвижного объекта, либо алгоритмическим путем.
В алгоритмах определения координат используется совокупность данных о местоположении стационарных сигнализаторов 2', принявших от абонентского сигнализатора 1 сигналы тревоги, мощности которых превышают заданный уровень, и измеренных значений мощностей принятых сигналов и пеленгов на них. Кроме того, может использоваться условно постоянная информация о местности и расположении на ней различных городских объектов с известными координатами, поступающая от блока 14 приема и обработки сообщений от внешних информационных источников.
Конкретный вид используемого алгоритма определения координат подвижного объекта для данного изобретения не существенен.
Хотя точность первичных измерений координат подвижного объекта относительно невелика (несколько десятков или даже сотен метров), она оказывается вполне достаточной для первичной локализации подвижного объекта на местности, выработки первичного "целеуказания" средствам оперативного реагирования и начала поиска объекта с возможностью последующей координации действий оперативных групп.
Если двигатель ТС не заблокирован и ТС находится в движении, то его местоположение отслеживается в блоке 12 вторичной обработки. При этом используются известные алгоритмы автосопровождения, применяемые, например, в радиолокации. Траектория перемещения объекта на местности фиксируется в цифровой памяти блока 12 вторичной обработки и, при необходимости, может быть вызвана на экран монитора или видеотабло для отображения оператору.
Точность и устойчивость автосопровождения подвижного объекта увеличивается при учете в алгоритмах вторичной обработки графа улично-дорожной сети и другой условно постоянной информации, формируемой в блоке 14 приема и обработки сообщений от внешних информационных источников по данным, поступившим от внешних информационных источников 15.
При этом конкретный вид алгоритма учета при автосопровождении указанной дополнительной информации для данного изобретения не существенен.
Владелец подвижного или стационарного охраняемого объекта, получивший тревожное оповещение по телефону или по пейджеру, связывается по сети 11 голосовой связи с центральной станцией 4 или с операторским бюро пейджерной сети связи 9. На центральную станцию 4 он передает информацию о том, имело ли на самом деле место несанкционированное воздействие на принадлежащий ему объект либо тревога была ложной. В случае неподтверждения факта несанкционированного воздействия на охраняемый объект последний снимается с сопровождения.
По пейджерной сети связи 9 владелец может также передать код блокирования двигателя ТС, если ранее двигатель не был заблокирован. Код блокирования поступает на вход абонентского приемника 21 и далее в узел 23 управления иммобилайзером подвижного объекта, после срабатывания которого УТС постепенно, чтобы не вызвать ДТП, прекращает свое движение. Одновременно код блокирования через блок 22 запуска абонентского сигнализатора поступает на абонентский сигнализатор 1 и, если до этого последний не был активирован каким-либо охранным датчиком, запускает абонентским сигнализатор 1.
Для персонификации действий владельца и устранения возможности несанкционированного воздействия злоумышленника на работу охранной системы служат ТК 25, на поверхности которых нанесены защищенные специальным покрытием одноразового применения, например краской, секретные коды (блокирующий код, коды "электронного счета" владельца и др.), визуально доступные только после стирания, например, с помощью монеты, защитного покрытия с соответствующих полей транспондерной карточки. В цифровой памяти ТК зафиксирован, кроме того, идентификационный код, по которому ТС "узнает" своего владельца.
Это происходит при внесении ТК 25 в специальную зону для дистанционного считывания, формируемую диаграммой излучения антенны узла 23 управления иммобилайзером. При совпадении идентификационного кода, считываемого с ТК, и одного из идентификационных кодов, записанных в памяти узла 23 управления иммобилайзером, последний деактивируется и ТС может быть приведено в движение.
Текущее состояние, в котором находится двигатель (блокированное или разблокированное), индицируется индикатором 24 режима работы.
Таким образом, при охране подвижного объекта, например ТС, используется несколько рубежей охраны, преодолеть которые возможно только с участием самого владельца ТС, что существенно снижает вероятность воздействия злоумышленника на логику работы охранной системы и соответственно уменьшает вероятность ложной тревоги.
При этом владельцу предоставляется свобода выбора режима работы системы. Он может, например, имитировать угон своего ТС для проверки работоспособности мониторинговой части системы, не задействуя при этом службы реагирования. Он может ограничиться запросом в информационный центр на получение нужных ему сведений о дорожной ситуации.
То есть реализуется схема абонентского обслуживания, аналогичная схемам обслуживания клиентов сотовых сетей связи "Билайн" и "МТС", описанная, например, на Интернет-сайтах www.bulinegsm.ru и www.mts.ru, соответственно.
После получения от владельца подтверждения факта несанкционированного воздействия на какой-либо из принадлежащих ему объектов прогнозируемые координаты и идентификационные признаки объекта, а также сведения о его владельце и относящаяся к этому объекту информация из блока 12 вторичной обработки, а также сопровождающая ее условно постоянная информация, например, о транспортных потоках на улично-дорожной сети, из блока 14 приема и обработки сообщений от внешних информационных источников поступают в блок 17 передачи информационных сообщений в службу оперативного реагирования. Здесь информация распределяется в ближайший к объекту несанкционированного воздействия центр 19 оперативного реагирования. Одновременно в формирователе 16 голосовых сообщений информационного центра 4 формируется голосовое сообщение, также поступающее в указанный центр 19 оперативного реагирования. Сообщение, сформированное в формирователе 16 голосовых сообщений, эквивалентно заявлению владельца. В центре 19 оперативного реагирования оно регистрируется дежурным или записывается на магнитный носитель, после чего приобретает юридическую силу официального заявления.
В соответствии с действующим законодательством, по указанному заявлению правоохранительные органы должны предпринять незамедлительные меры по пресечению противоправных действий и обеспечению безопасности граждан и их имущества.
Как правило, такие действия осуществляются милицией с использованием подвижных сил и средств оперативного реагирования - пеших и моторизованных патрульных групп. Согласно заявленному изобретению, эти группы оснащаются носимыми или возимыми пеленгационными устройствами 20, а также получают начальные "целеуказания" в виде данных о местоположении объекта (его географических координатах и местных ориентирах) и его идентификационных признаках, например формуляра с указанием марки, цвета и государственного номера угнанного автомобиля. При этом могут использоваться известные программные продукты для оптимизации маршрутов движения патрульных групп, например, ГИС "Территория" и ТИС-УВД", поставляемые фирмой "КИБЕРСО" (www.glasnet.ru).
После обнаружения объекта нарядом службы оперативного реагирования, например, с помощью установленного на борту патрульной машины пеленгационного устройства, начинается процесс сближения с объектом поиска, при котором точность определения его местоположения возрастает независимо от инструментальной точности первичных измерений местоположения объекта ("первичного целеуказания"). Благодаря этому время реагирования (с момента передачи начального целеуказания до момента прибытия наряда к объекту) уменьшается и может быть доведено до норматива, используемого вневедомственной охраной при охране стационарных объектов (до нескольких минут).
Таким образом, предложенный способ комплексной охраны подвижных и неподвижных объектов позволяет устранить принципиальные недостатки способа-прототипа, препятствующие его практической реализации в реальных городских условиях.
А именно, применение двухэтапного метода определения местоположения ТС: вначале - локализация его в виде "микросоты", размеры которой определяются точностью первичной пеленгации объекта близлежащими стационарными сигнализаторами 2' и/или базисными станциями 3', а затем уточнение координат объекта внутри "микросоты" с помощью пеленгационных устройств 20, которыми оснащены мобильные наряды оперативного реагирования, позволяет сократить время реагирования и одновременно повысить надежность определения местоположения объекта поиска за счет снижения степени зависимости результатов расчета его координат от "геометрического фактора" и расположения относительно объектов городской инфраструктуры. Этому способствует и принудительная остановка ТС его владельцем по радиоканалу, которая одновременно снижает риск ДТП во время захвата УТС силами оперативного реагирования.
Наконец, применение владельцем ТС малогабаритных ТК, содержащих секретные коды, ограждает его от опасности воздействия со стороны злоумышленника на алгоритм работы охранной системы и снижает вероятность ложных тревог.
Вышеуказанные технические результаты достигаются благодаря предложенной совокупности ограничительных и отличительных признаков заявленного изобретения согласно единому изобретательскому замыслу.
Все описанные в изобретении действия осуществляются над конкретными материальными объектами с использованием известных и апробированных на практике технических и программных средств. В связи с этим, реализуемость и практическая значимость изобретения не требуют дополнительных доказательств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2001 |
|
RU2174923C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2000 |
|
RU2155684C1 |
| РЕГИОНАЛЬНАЯ СИГНАЛЬНАЯ ПРОТИВОУГОННАЯ СИСТЕМА | 2003 |
|
RU2228861C1 |
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ОПРЕДЕЛЕНИЯ ЕГО МЕСТОПОЛОЖЕНИЯ | 2000 |
|
RU2156706C1 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |
| СИСТЕМА ОХРАНЫ И ПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2349962C1 |
Изобретение относится к системам для охраны транспортных средств (ТС) и объектов недвижимости и предназначено для применения в регионах, покрытых радиотелефонными и пейджинговыми сетями связи. В предложенной системе реализована двухэтапная процедура определения местоположения ТС. Вначале применяют сотовый метод измерения координат для сужения начальной зоны поиска угнанного ТС, а затем пеленгационный метод уточнения координат ТС с помощью мобильных нарядов оперативного реагирования, оснащенных пеленгационными приемниками. Передачу тревожного сигнала по пейджинговой сети связи осуществляют не только владельцу ТС, но и на борт ТС для блокирования его движения. Использование транспондерной карточки позволяет уменьшить вероятность ложной тревоги. В системе достигаются снижение степени зависимости точности определения координат ТС от его расположения относительно элементов городской инфраструктуры и базисных станций, а также сокращение времени поиска ТС и уменьшение риска возникновения дорожно-транспортного происшествия во время задержания объекта. 1 ил.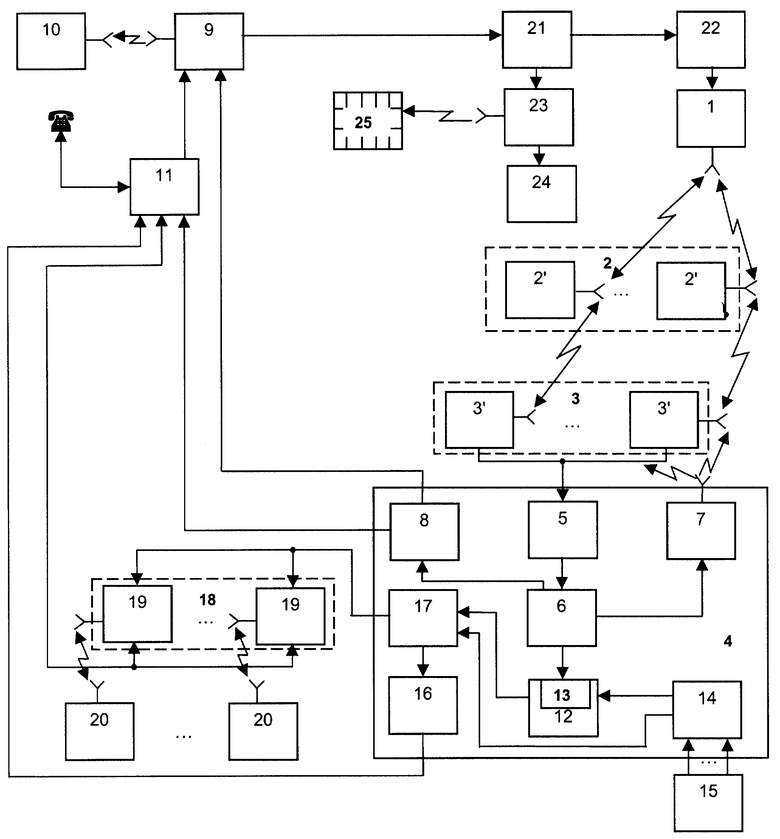
Способ комплексной охраны подвижных и неподвижных объектов, при котором с помощью стационарных сигнализаторов, установленных на сооружениях городской инфраструктуры с известными географическими координатами, излучают кодовые посылки, несущие информацию о категории посылки, выраженной тестом, информационным сообщением или сигналом тревоги, и информацию о местоположении указанных сооружений, а с помощью абонентских сигнализаторов, установленных на подвижных или неподвижных охраняемых объектах, излучают кодовые посылки, несущие информацию о категории сообщения, коды идентификационных признаков подвижных и неподвижных объектов и коды принадлежности их соответствующим владельцам, принимают эти кодовые посылки на территориально разнесенных базисных станциях, осуществляют их предварительную обработку и передают в цифровом виде на центральную станцию, где с помощью первичной цифровой обработки определяют категорию принятого сообщения, идентификационные признаки объекта и географические координаты сигнализатора, излучающего данную кодовую посылку, а также расстояния от абонентского сигнализатора до ближайших к нему базисных станций, после чего формируют и передают на базисные станции, стационарные сигнализаторы и абонентские сигнализаторы, установленные на подвижных и неподвижных охраняемых объектах, ответные тестовые сообщения, подтверждающие факт взятия данного объекта под охрану, а в случае несанкционированного воздействия на какой-либо из оборудованных абонентскими сигнализаторами подвижный или неподвижный объект и обнаружения в его кодовой посылке сигнала тревоги передают тревожное оповещение по пейджинговой сети связи на индивидуальный приемник владельца и на приемник абонентского сигнализатора, установленного на принадлежащем этому владельцу подвижном или неподвижном объекте, при этом часть стационарных сигнализаторов используют в качестве базисных станций, отличающийся тем, что при охране подвижных объектов одновременно с измерениями расстояний между абонентским сигнализатором и ближайшими к нему стационарными сигнализаторами или базисными станциями пеленгуют подвижный объект ближайшими к нему стационарными сигнализаторами или базисными станциями и определяют его полярные координаты относительно этих стационарных сигнализаторов или базисных станций, на центральной станции осуществляют дополнительную цифровую обработку первично обработанных кодовых посылок с использованием условно постоянной информации о местности, о расположении на ней различных городских сооружений и транспортных потоках на улично-дорожной сети, получаемой из внешних информационных источников, определяют местоположение подвижного объекта на местности при дополнительной цифровой обработке в центральной станции по совокупности данных о географических координатах ближайших к нему стационарных сигнализаторов или базисных станций и значений полярных координат подвижного объекта относительно этих стационарных сигнализаторов или базисных станций, одновременно с передачей тревожного оповещения владельцу подвижного объекта, абонентский сигнализатор которого передал сигнал тревоги, активируют по пейджинговой сети связи установленный на этом объекте иммобилайзер и блокируют с его помощью движение подвижного объекта, а после получения от его владельца подтверждения факта несанкционированного воздействия на принадлежащий ему подвижный объект формируют на центральной станции и передают по проводным или беспроводным каналам связи в ближайший к данному объекту центр оперативного реагирования голосовое сообщение и цифровые данные, несущие информацию о категории сигнала тревоги, идентификационных признаках объекта, местоположении данного объекта на местности и сведения о владельце, а в процессе реагирования на факт несанкционированного воздействия определяют с помощью носимых или возимых пеленгационных устройств, размещенных на подвижных средствах оперативного реагирования, полярные координаты данного объекта относительно носимых или возимых пеленгационных устройств и с их помощью уточняют ранее переданные с центральной станции данные о местоположении объекта на местности, при этом владельца охраняемого подвижного объекта снабжают одной или несколькими транспондерными карточками, на поверхности которых нанесены защищенные специальным покрытием одноразового применения, например краской, секретные коды, становящиеся визуально доступными только при стирании защитного покрытия с соответствующих полей транспондерной карточки, а в цифровой памяти зафиксирован идентификационный код владельца, считывают идентификационный код с помощью установленного на подвижном объекте узла управления иммобилайзером при внесении транспондерной карточки в специальную зону для дистанционного считывания, сравнивают считанный код с каждым идентификационным кодом, хранящимся в том же узле управления иммобилайзером, и при их совпадении деактивируют иммобилайзер с последующим разблокированием движения подвижного объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2106694C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ОХРАННОЙ СИСТЕМОЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2074826C1 |
| DE 4415052 A1, 02.11.1995 | |||
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |

