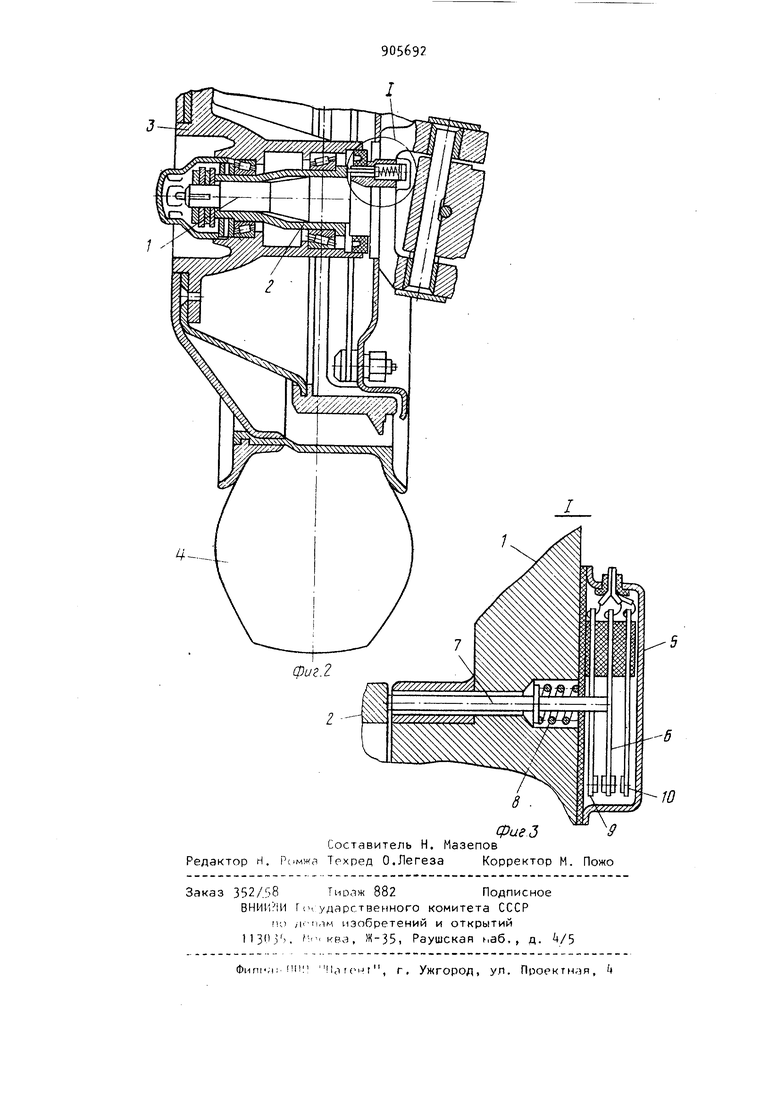
вует с датчиком боковых сил, выполненным в виде толкателя 7 подпружиненного относительно цапфы 1 посредством пружины 8. Наружные 9 и 10 и внутренние 11 и 12 неподвижные контакты реле 5 соединены с системой управления, включающаей электромагни 13 с четырьмя обмотками,магнитные по токи парных обмоток которого направлены навстречу друг к другу, и источник напряжения 1, подключенный через тумблер 15 к обмоткам электромагнита 13. Реверсивный механизм изменения рабочей длины поперечной рулевой тяги 16 включает гидроцилиндр 17,сообщенный с гидро-распределителе 18,связанным с электромагнитом 13: гидронасос 19, предохранительный кла пан 20 и бак 21. При прямолинейном движении транспортного средства с оптимальным схож дением, т.е. когда плоскости вращения управляемых колес параллельны, вследствие отсутствия боковых сил подвижной контакт 6, связанный со втулкой 2, занимает, среднее положение, размыкая цепь обмоток электромагнита 13. При этом гидрораспределитель 18 находится в нейтральном положении и запирает обе полости гид роцилиндра 17- Рабочая длинаОпоперемной рулевой тяги 1б остается неиз менной, В случае отклонения схождения от оптимального управляемые колеса 4 вместе со втулками 2 перемещаются вдоль цапфы 1 навстречу друг другу или в противоположном направлении в зависимости от знака отклонения схождения от оптимального. Вту ки 2,воздействуя на толкатели 7, замыкаю.т подвижной контакт 6 с обоими нару(ными 9 и 10 или с обоими внутренними неподвижными контактами 11 и 12 реле 5. При этом парные обмотки электромагнита 13 оказываются под напряжением, вызывая перемещение гидрораспределителя 18 в соответствующем направлении. В результате этого гидроцилиндр 17 изменяет рабочую длину поперечной рулевой тяги 16 восстанавливая параллельность плоскостей вращения управляемых колес , Величина угла отклонения плоскостей вращения управляемых колес от среднего положения соответствующего оптимальному схождению , определяется величиной регулируемых зазоров между подвижным b и неподвижными 9-10 контактами. При движении транспортного средства на повороте под действием возникающих боковых сил управляемые колеса Ц вместе со ступицами 3 и втулками 2 перемещаются вдоль цапф Г в одном направлении. Втулки 2,взаимодействуя с толкателями 7, замыкают подвижной контакт 6 с неподвижным внутренним контактом на одном управляемом колесе и с неподвижным наружным контактом на другом управляемом колесе. Электрический ток при этом проходит по обмоткам электромагнита 13 в соответствующих направлениях, компенсируя действие магнитных потоков в этих обмотках. Гидрораспределитель 18 находится в нейтральном положении, а рабочая длина поперечной рулевой тяги 16 не изменяется. Таким образом, предлагаемое устройство при прямолинейном движении транспортного средства позволяет автоматически сохранить с необходимой томностью параллельность плоскостей вращения управляемых колес и не препятствует нормальному повороту управляемых колес при движении транспортного средства на повороте. Формула изобретения Устройство для автоматического регулирования схождения управляемых колес транспортного средства, содержащее датчики боковых сил, действующих на управляемые колеса, реле; подвижной контакт которых связан с соответствующим датчиком боковых сил, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, кинематически связанную с неподвижными контактами реле, отличающееся тем, что, с целью улучшения условий труда водителя, оно снабжено втулкой, жестко соединенной со ступицей управляемого колеса и установленной на цапфе управляемого колеса с возможностью осевого перемещения и взаимодействия с соответствующим датчиком боковых сил, а система управления электрически соединена с обоими неподвижными контактами реле. Источники информации, принятые во вниманке при экспертизе 1. Авторское свидетельство СССР N it5360, кл, G 01 М 17/06, 197.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2005 |
|
RU2309078C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ДВИЖЕНИЯ | 2007 |
|
RU2348912C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2005 |
|
RU2309867C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ДВИЖЕНИЯ | 2009 |
|
RU2410273C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ДВИЖЕНИЯ | 2009 |
|
RU2410274C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2007 |
|
RU2348914C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ДВИЖЕНИИ | 2007 |
|
RU2348913C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2008 |
|
RU2381478C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2008 |
|
RU2381479C1 |
| Устройство для установки схождения управляемых колес транспортного средства | 1973 |
|
SU652463A1 |