I
Изобретение относится к экскава-торной технике, предназначенной для открытой добычи руд цветных и черных металлов, руд горной химии и нерудных полезных ископаемых.
Известно оборудование экскаватора, содержащее стрелу, ковш, вставку и шарнирно-рычажный механизм,, установленный между вставкой и стрелой, при этом один рычаг шарнирно связан со стрелой и гидроцилиндром поворота, а второй выполнен телескопическим и шарнирно связан со вставкой l .
Однако.это оборудование не обеспечивает возможность прямолинейного горизонтального перемещения ковша.
Другим известным техническим решением является рабочее оборудование одноковшового гидравлического экскаватора, содержащее стрелу с телескопической рукоятью и ковшом и гидроцилиндры управления стрелы, рукояти и ковша. Рукоять имеет возможность принудительного перемещения и поворота в вертикальной плоскости посредством гидроцилиндра. Свободный конец рукояти шарнирно закреплен на ковше, соединенном с рукоятью при помощи дополнительного гидроцилиндра f2.
Недостаток данного рабочего оборудования - соединение рукояти со стрелой не позволяет осуществлять горизонтальное перемещение ковша при любых положениях стрелы и, как следствие этого, снижается качество и эффективность выемки полезных ископаемых при разработке сложноструктурных месторождений.
Цель изобретения - повышение эффективности раздельной выемки полезных ископаемых путем осуществления горизонтального или наклонного черпания, а также обеспечения возможности перевода экскаватора на режим работы прямой механической лопаты.
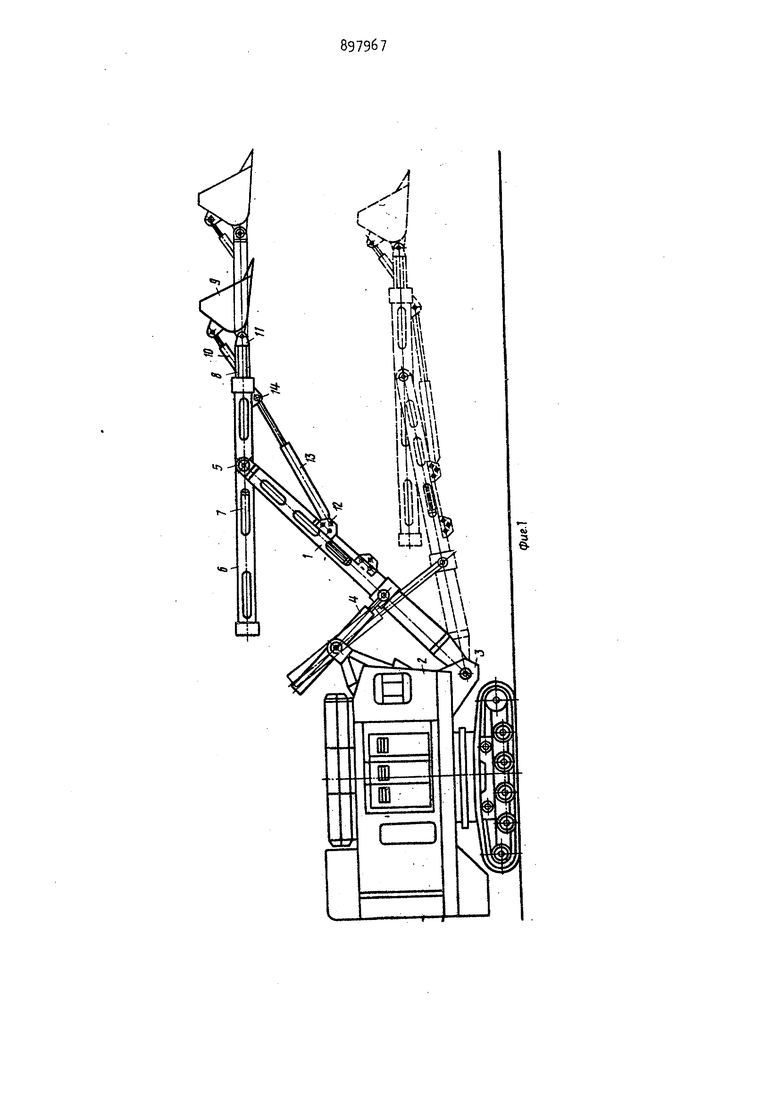
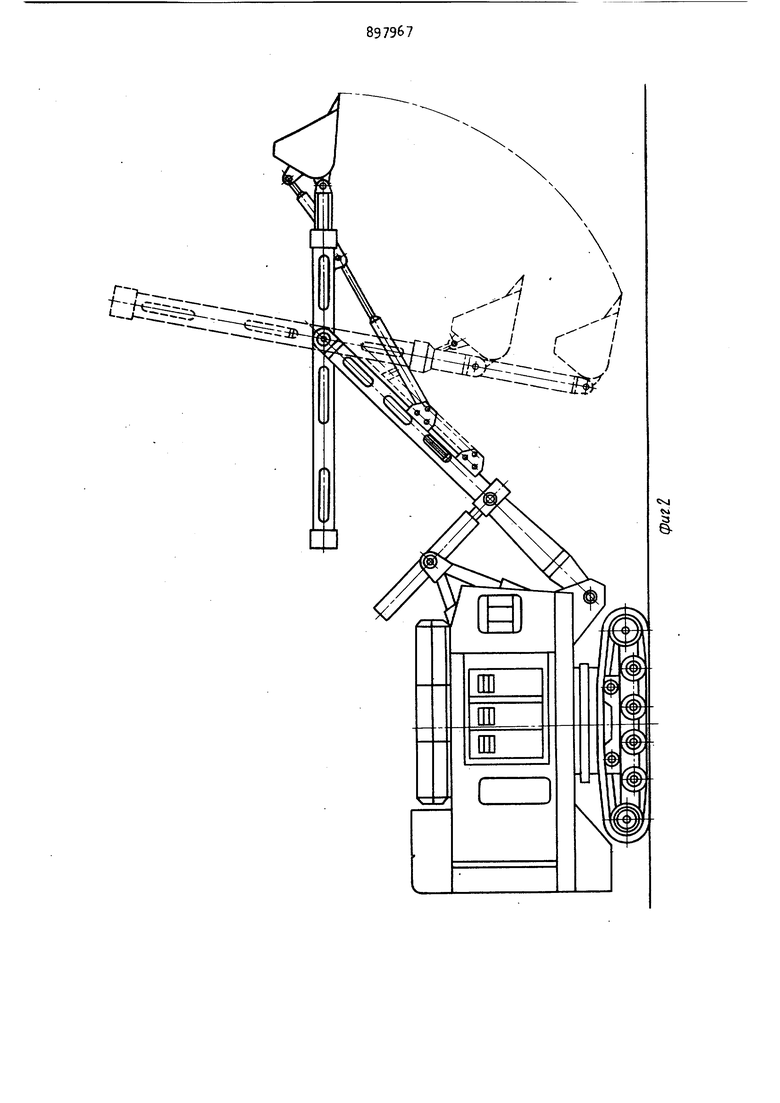
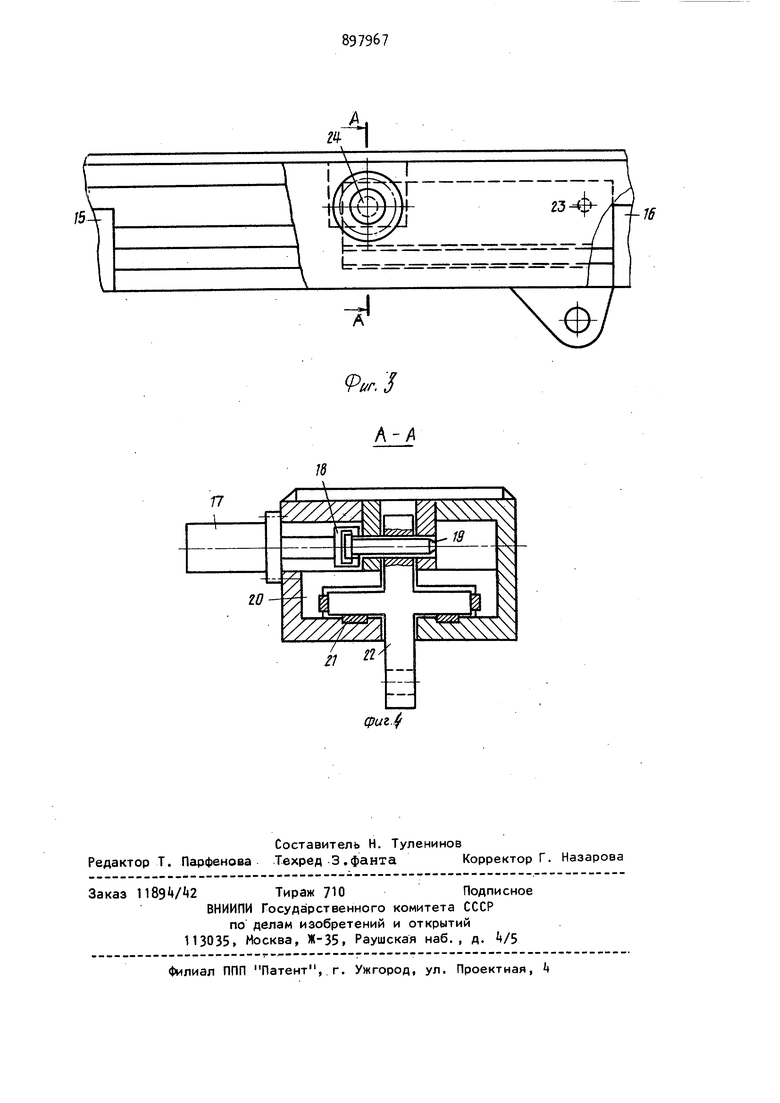
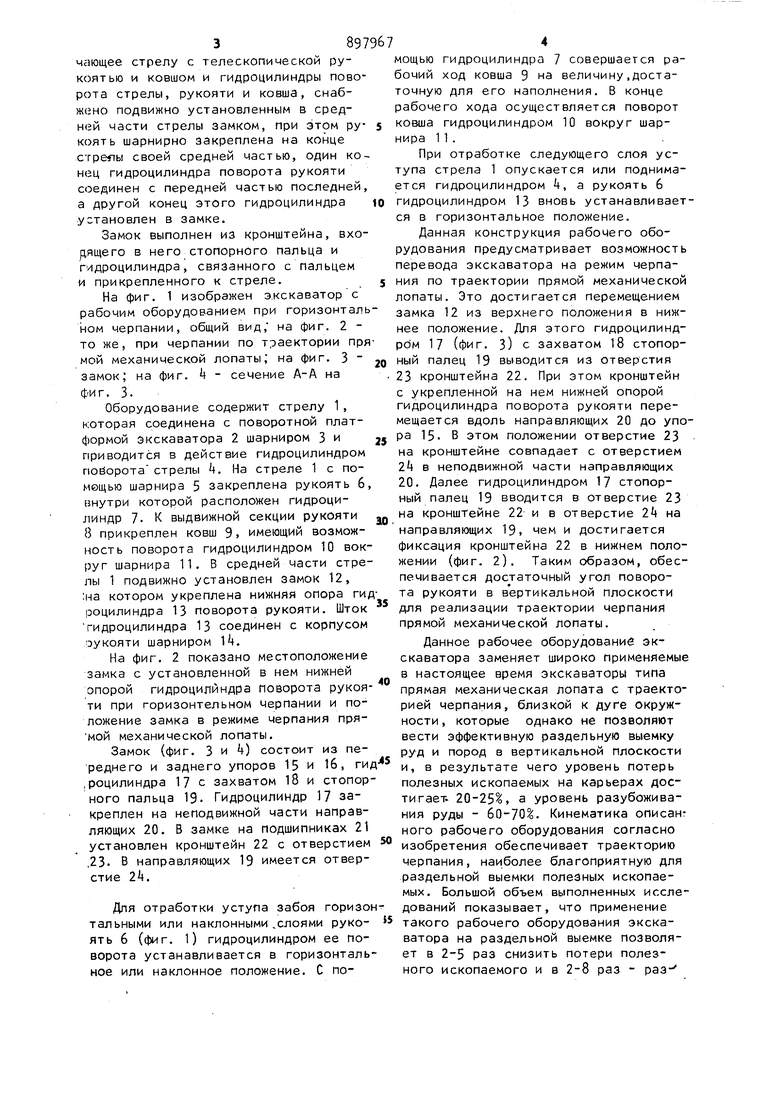
Поставленная цель достигается тем, что рабочее оборудование гидравлического одноковшового экскаватора, вклю.3897чающее стрелу с телескопической рукоятью и ковшом и гидроцилиндры поворота стрелы, рукояти и ковша, снабжено подвижно установленным в средней части стрелы замком, при этом ру коять шарнирно закреплена на конце стрелы своей средней мастью, один конец гидроцилиндра поворота рукояти соединен с передней частью последней, а другой конец этого гидроцилиндра установлен в замке. Замок выполнен из кронштейна, входящего в него стопорного пальца и пидроцилиндра, связанного с пальцем и прикрепленного к стреле. На фиг. 1 изображен экскаватор с рабочим оборудованием при горизонталь ном черпании, общий вид, на фиг. 2 то же, при черпании по траектории пря мой механической лопаты; на фиг. 3 замок; на фиг. k - сечение А-А на фиг. 3. Оборудование содержит стрелу 1, которая соединена с поворотной платформой экскаватора 2 шарниром 3 и приводится в действие гидроцилиндром поЁоротастрелы 4. На стреле 1 с помощью шарнира 5 закреплена рукоять 6 Езнутри которой расположен гидроцилиндр 7. К выдвижной секции рукояти 8 прикреплен ковш 9, имеющий возможность поворота гидроцилиндром 10 вок руг шарнира П. В средней масти стре лы 1 подвижно установлен замок 12, :на котором укреплена нижняя опора ги роцилиндра 13 поворота рукояти. Шток гидроцилиндра 13 соединен с корпусом оукояти шарниром 14. На фиг. 2 показано местоположение замка с установленной в нем нижней опорой гидроцилйндра поворота рукоя ти при горизонтельном мерпании и положение замка в режиме мерпания прямой механимеской лопаты. Замок (фиг. 3 и ) состоит из переднего и заднего упоров 15 и 16, ги .роцилиндра 17 с захватом 18 и стопор ного пальца 19. Гидроцилиндр 17 закреплен на неподвижной части направляющих 20. В замке на подшипниках 21 установлен кронштейн 22 с отверстием .23. В направляющих 19 имеется отверстие 2k, Для отработки уступа забоя горизо тальными или наклонными ,слоями рукоять 6 (фиг. 1) гидроцилиндром ее поворота устанавливается в горизонталь ное или наклонное положение. С помощью гидроцилиндра 7 совершается рабочий ход ковша 9 на велимину .достаточную для его наполнения. В конце рабочего хода осуществляется поворот ковша гидроцилиндром 10 вокруг шарнира 11. При отработке следующего слоя уступа стрела 1 опускается или поднимается гидроцилиндром k, а рукоять 6 гидроцилиндром 13 вновь устанавливается в горизонтальное положение. Данная конструкция рабомего оборудования предусматривает возможность перевода экскаватора на режим мерпания по траектории прямой механимеской лопаты. Это достигается перемещением замка 12 из верхнего положения в нижнее положение. Для этого гидроцилиндpdM 17 (фиг. З) с захватом 18 стопорный палец 19 выводится из отверстия 23 кронштейна 22. При этом кронштейн с укрепленной на нем нижней опорой гидроцилиндра поворота рукояти перемещается вдоль направляющих 20 до упора 15- В этом положении отверстие 23 на кронштейне совпадает с отверстием 2 в неподвижной масти направляющих 20. Далее гидроцилиндром 17 стопорный палец 19 вводится в отверстие 23 на кронштейне 22 и в отверстие на направляющих 19, мем и достигается фиксация кронштейна 22 в нижнем положении (фиг. 2). Таким образом, обеспечивается достатомный угол поворота рукояти в вертикальной плоскости для реализации траектории мерпания прямой механимеской лопаты. Данное рабочее оборудование экскаватора заменяет широко применяемые в настоящее время экскаваторы типа прямая механическая лопата с траекторией мерпания, близкой к дуге окружности , которые однако не позволяют вести эффективную раздельную выемку руд и пород в вертикальной плоскости и, в результате мего уровень потерь полезных ископаемых на карьерах достигает. 20-25, а уровень разубоживания руды - 60-70. Кинематика описанного рабомего оборудования согласно изобретения обеспемивает траекторию мерпания, наиболее благоприятную для раздельной выемки полезных ископаемых. Большой объем выполненных исследований показывает, мто применение такого рабочего оборудования экскаватора на раздельной выемке позволяет в 2-5 раз снизить потери полезного ископаемого и в 2-8 раз - разубоживание руды по сравнению с существующей экскавационной техникой.
Формула изобретения
1. Рабочее оборудование гидравлического одноковшового экскаватора, включающее стрелу с телескопической рукоятью и ковшом и гидроцилиндрыto
поворота стрелы, рукояти и ковша, отличающееся тем, что, с целью повышения эффективности раздельной выемки полезных ископаемых, путем осуществления горизонтального 5 или наклонного черпания, а также обеспечения возможности перевода экскаватора на режим работы прямой механической лопаты, оно снабжено подвижно установленным в средней части стре- 20
лы замком, при этом рукоять шарнирно закреплена на конце стрелы своей средней частью, один конец гидроцилиндра поворота рукояти соединен с передней частью последней, а другои конец этого гидроцилиндра установлен в замке.
2. Оборудование по п. 1, отличающееся тем, что замок выполнен из кронштейна, входящего в него стопорного пальца и гидроцилйндра, связанного с пальцем и прикрепленного к стреле.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
tf 604913, кл. Е 02 F 3/38, .IZ.yt.
2.Авторское свидетельство СССР № 282158, кл. Е 02 F 3/38, 09.07.69 (прототип).
Л О
(,J
АА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование канатного экскаватора | 1983 |
|
SU1089197A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВЫХ ГИДРАВЛИЧЕСКИХ ЭКСКАВАТОРОВ | 2005 |
|
RU2310044C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОБРАТНОЙ ЛОПАТЫ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2004 |
|
RU2266371C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ПРЯМОЙ ИЛИ ОБРАТНОЙ ЛОПАТ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2003 |
|
RU2236510C1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ТИПА ПРЯМОЙ ЛОПАТЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU239130A1 |
| Рабочее оборудование одноковшового экскаватора | 1981 |
|
SU953113A1 |
| СМЕННОЕ ПОГРУЗОЧНОЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ ЭКСКАВАТОРУ | 1969 |
|
SU256654A1 |
| Рабочее оборудование одноковшового экскаватора | 1980 |
|
SU909027A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| Рабочее оборудование одноковшового гидравлического экскаватора конструкции даниленко н.д. и мещерякова а.ф. | 1976 |
|
SU673705A1 |