Изобретение относится к импульсным модуляторам для преобразования комплексного входного сигнала в импульсный сигнал и способу импульсной модуляции комплексного входного сигнала.
Для преобразования цифрового входного сигнала в аналоговый сигнал можно использовать цифроаналоговый преобразователь. Однако данные узлы достаточно дороги и отличаются большим энергопотреблением. Зачастую требуется значительное напряжение питания. Другим недостатком аналого-цифровых преобразователей является то, что они с трудом интегрируются в цифровые электрические устройства и ограничивают миниатюризацию последних.
Вследствие этого в большинстве приложений аналого-цифровые преобразователи заменяют цифровыми импульсными модуляторами, такими как сигма-дельта преобразователи. В состав традиционного сигма-дельта модулятора входит интегратор, который интегрирует разностный сигнал между входным сигналом и квантованным импульсным сигналом обратной связи, а также квантователь, который квантует интегрированный сигнал. Квантованный импульсный сигнал может быть затем отведен на вывод квантователя и возвращен как сигнал обратной связи на вход сигма-дельта преобразователя. Сигма-дельта модуляторы различаются по типовым шумовым характеристикам, причем шум квантования смещен из области низких частот, лежащих вблизи ω=0, в область более высоких частот. Шум в области более высоких частот может быть затем подавлен с помощью фильтра нижних частот. Сигма-дельта преобразователи могут применяться в случае весьма скромных финансовых возможностей, а также могут интегрироваться с цифровыми электрическими устройствами. Однако для некоторых приложений оправданы варианты реализации с сохранением шума квантования в области более высоких частот.
Одной из задач данного изобретения является создание импульсного модулятора, а также способов импульсной модуляции, которые обеспечивали бы гибкое регулирование спектрального распределения шума квантования.
Данная задача изобретения решена посредством импульсного модулятора для преобразования комплексного входного сигнала в импульсный сигнал, как указано в п.1, схемы возбуждения по п.16, генератора частоты по п.19 и способа импульсной модуляции комплексного входного сигнала по п.21. Пункт формулы 31 относится к программному продукту для реализации указанного способа.
Согласно данному изобретению импульсный модулятор, используемый для преобразования комплексного входного сигнала в импульсный сигнал, имеет каскад вычитания, который выдает сигнал ошибки регулирования на основе разницы между комплексным входным сигналом и сигналом обратной связи. Далее, импульсный модулятор имеет каскад преобразования сигнала, в котором выполняется преобразование сигнала ошибки регулирования в управляющий сигнал. Управляющий сигнал умножают в первом каскаде умножения на комплексный смешанный сигнал с частотой ω0 с получением таким образом по меньшей мере одной действительной или мнимой части управляющего сигнала, смещенного в верхний частотный диапазон ω0. Также импульсный модулятор имеет каскад квантования, в котором осуществляется квантование по меньшей мере одной действительной или мнимой части управляющего сигнала, смещенного в верхний частотный диапазон на ω0, с получением таким образом импульсного сигнала; в состав импульсного модулятора также входит блок обратной связи, который использует импульсный сигнал для получения сигнала обратной связи для каскада вычитания.
Далее приведено описание способа работы импульсного модулятора согласно данному изобретению, представляющего собой усовершенствованный вариант традиционного сигма-дельта преобразователя, на примере варианта реализации с постоянным входным сигналом, что, однако, никоим образом не ограничивает прочие варианты применения изобретения. Каскад вычитания и каскад преобразования преобразовывают данный входной сигнал в управляющий сигнал, который точно так же только слегка изменяется во времени. В отличии от общепринятых сигма-дельта преобразователей данный управляющий сигнал умножается первым каскадом умножения на комплексный смешанный сигнал с частотой ω0 с получением таким образом управляющего сигнала, смещенного в верхний частотный диапазон с частотой ω0. Действительная или мнимая часть данного управляющего сигнала с частотой ω0 затем квантуется каскадом квантования, и таким образом на выходе каскада квантования получается действительный импульсный сигнал с преобладающей частотой ω0. Данный действительный импульсный сигнал, вместе с положительными или отрицательными импульсами имитирует синусоидальный сигнал с частотой ω0. Импульсный сигнал в то же время представляет собой начальную точку для расчета сигнала обратной связи, который затем возвращается на каскад вычитания, где он вычитается из входного сигнала для определения ошибки регулирования.
Для получения импульсного сигнала не обязательно рассчитывать как действительную, так и мнимую части управляющего сигнала, смещенного в верхний частотный диапазон на ω0. При необходимости можно вывести импульсный сигнал из действительной части смещенного в верхний частотный диапазон управляющего сигнала, при этом не обязательно создавать мнимую часть смешанного управляющего сигнала.
Основным преимуществом импульсного модулятора данного изобретения по сравнению с общепринятыми сигма-дельта модуляторами является то, что диапазон низких шумов квантования смещен из низкочастотного диапазона ω=0 к рабочей частоте ω0. Это достигается посредством комплексного смешивания управляющего сигнала в первом каскаде умножения. Таким образом, генерируется импульсный сигнал с низким уровнем шума в прилежащем к ω0 спектральном диапазоне.
Отправным пунктом в рассмотрении шумовой характеристики является то, что каскад преобразования сигнала, который может, к примеру, реализовываться на основе интегратора, имеет высокие показатели пропускания по нижним частотам. Это означает, что относительно высокочастотные составляющие подавляются каскадом преобразования сигнала. В традиционных сигма-дельта преобразователях такое подавление высокочастотных составляющих в контуре регулирования приводит к росту шума квантования на упоминавшихся выше более высоких частотах. А низкочастотный шум квантования, напротив, весьма низок. В случае же с импульсным модулятором, соответствующим данному изобретению, управляющий сигнал, который может быть снят с выхода каскада преобразования сигнала, смещен в верхний частотный диапазон на частоту ω0 путем умножения комплексного смешанного сигнала на частоту ω0. Таким образом, диапазон низкочастотного шума квантования также смещается от частоты ω=0 к частоте смешивания ω0, даже если каскад преобразования сигнала на входе все еще обрабатывает несмещенный до этого сигнал. В результате получается импульсный сигнал с низким уровнем шума в области ω0.
Импульсный модулятор данного изобретения отличается низкой стоимостью, относительно малым энергопотреблением и может быть легко интегрирован с цифровыми электрическими устройствами.
Предпочтительно импульсный модулятор имеет тракт синфазного сигнала для обработки действительной части входного сигнала, а также тракт квадратурного сигнала для обработки мнимой части. Также желательно, чтобы сигнал ошибки регулирования, управляющий сигнал и сигнал обратной связи являлись комплексными сигналами, то есть каждый из них имел действительную и мнимую составляющие. Для обеспечения соответствия по фазе действительного импульсного сигнала действительной или мнимой части управляющего сигнала, смещенного в верхний частотный диапазон на ω0, каскад вычитания, каскад преобразования сигнала, первый каскад умножения и блок обратной связи должны представлять собой комплексные блоки обработки сигнала, в каждом из которых имеются тракты синфазного сигнала и квадратурного сигнала. Однако для получения действительного импульсного сигнала после первого каскада умножения посредством каскада квантования требуется только действительная часть (или в противном случае - мнимая часть) выходного сигнала. Каскад квантования может являться, таким образом, действительным контуром обработки. На самом деле, действительный импульсный сигнал затем еще раз преобразуется в комплексный сигнал обратной связи в блоке обратной связи. Конструкция импульсного модулятора позволяет синтезировать при точном совпадении фазы действительный импульсный сигнал, воспроизводящий гармонические колебания на частоте ω0 при низком фазовом и амплитудном шуме.
Согласно одному из предпочтительных вариантов осуществления изобретения в состав каскада преобразования сигнала входит каскад интегратора, в котором осуществляется интегрирование сигнала ошибки регулирования и вывод интегрированного сигнала как управляющего. Интегрирование сигнала ошибки регулирования позволяет непрерывно синхронизировать (комплексный) интегрированный сигнал с комплексным входным сигналом. Поскольку каскад интегратора имеет характеристику, аналогичную низкочастотному фильтру, управляющий сигнал на выходе каскада интегратора имеет пониженный уровень шума в области ω0. И посредством смещения этого управляющего сигнала первым каскадом умножения с последующим квантованием получают импульсный сигнал с требуемыми шумовыми характеристиками.
Целесообразно наличие в каскаде интегратора двух интеграторов: первого интегратора для тракта синфазного сигнала и второго интегратора для тракта квадратурного сигнала; при этом первый интегратор работает с действительной частью сигнала ошибки регулирования, а второй интегратор - соответственно, с мнимой. Каскад комплексного интегратора комплексного сигнала ошибки регулирования может быть, таким образом, реализован при помощи двух раздельных интеграторов.
Желательно также, чтобы в состав каскада преобразования сигнала входил каскад усиления. Коэффициент усиления в данном случае выбран таким, чтобы соответствовать уровню входного сигнала квантователя.
В более предпочтительном варианте осуществления изобретения первый каскад умножения имеет два умножителя: один - для тракта синфазного сигнала, а второй - для тракта квадратурного сигнала. Первый умножитель умножает действительную часть управляющего сигнала на действительную часть комплексного смешанного сигнала с частотой ω0 с получением таким образом первого результирующего сигнала. Второй умножитель умножает мнимую часть управляющего сигнала на мнимую часть комплексного смешанного сигнала с частотой ω0 с получением таким образом второго результирующего сигнала. Согласно другому предпочтительному варианту осуществления изобретения в импульсный модулятор встроен сумматор, складывающий первый результирующий сигнал от первого умножителя и второй результирующий сигнал от второго умножителя с получением суммарного сигнала, что необходимо для определения действительной части смешанного управляющего сигнала.
Если допустить, что комплексный управляющий сигнал имеет вид R+j·I и в качестве примера что комплексный преобразованный сигнал может быть представлен формулой  то первый результирующий сигнал от первого умножителя имеет вид R·cos(ω0t). Допустим, что второй результирующий сигнал от второго умножителя имеет вид I·sin(ω0t), а сумматор дает суммарный сигнал R·cos(ω0t)+I·sin(ω0t). Однако этот сигнал точно соответствует действительной части (R+j·I)·
то первый результирующий сигнал от первого умножителя имеет вид R·cos(ω0t). Допустим, что второй результирующий сигнал от второго умножителя имеет вид I·sin(ω0t), а сумматор дает суммарный сигнал R·cos(ω0t)+I·sin(ω0t). Однако этот сигнал точно соответствует действительной части (R+j·I)· Таким образом, действительная часть комплексного умножения управляющего сигнала и смешанного сигнала может быть определена посредством первого умножителя, второго умножителя и сумматора.
Таким образом, действительная часть комплексного умножения управляющего сигнала и смешанного сигнала может быть определена посредством первого умножителя, второго умножителя и сумматора.
Согласно одному из предпочтительных вариантов осуществления изобретения суммарный сигнал производится сумматором, а затем квантуется каскадом квантования для получения таким образом действительного импульсного сигнала.
В этом случае удобно прибавлять шум к входному сигналу каскада квантования. Импульсный модулятор подает тактовые импульсы на частоте дискретизации ωA, которая должна быть значительно выше частоты микширования ω0. При определенных соотношениях ω0 к ωA в импульсном модуляторе возникают релаксационные колебания, которые видны в спектре частот импульсного сигнала как дополнительные пики. Поскольку шумовой сигнал складывается с входным сигналом квантователя, результат процесса квантования является статистически округленным. Такое решение позволяет предотвратить образование релаксационных колебаний.
Предпочтительно, чтобы каскад квантования выполнял квантование соответствующего входного сигнала по двум или по трем переменным. В случае квантования по двум переменным можно допустить, что импульсный сигнал может иметь значения только 0 или 1. Таким образом производится импульсный сигнал, который содержит только положительные импульсы напряжения. В случае импульсного сигнала, квантованного по трем переменным, он может иметь значения -1, 0, 1. Подобный импульсный сигнал включает как положительные, так и отрицательные импульсы напряжения. Таким образом, квантование по трем переменным проводят в случае необходимости получения импульсного сигнала с положительными и отрицательными импульсами.
Предпочтительно блок обратной связи включает в себя второй каскад умножения, который выполняет умножение импульсного сигнала на комплексно-сопряженный смешанный сигнал, имеющий частоту колебаний ω0, с образованием таким образом сигнала обратной связи для вычитателя, смещенного в нижний частотный диапазон на ω0. Импульсный сигнал получен квантованием действительной части смещенного в верхний частотный диапазон управляющего сигнала, и, соответственно, преобладающей частотной составляющей является частота ω0. Перед тем как импульсный сигнал может быть использован как сигнал обратной связи, он должен быть, следовательно, снова смещен в нижний диапазон до полосы частот исходных сигналов. Для осуществления этого импульсный сигнал умножают на комплексно-сопряженный смешанный сигнал с частотой ω0, получая таким образом смещенный в диапазон низких частот комплексный сигнал обратной связи.
Предпочтительно, чтобы на втором каскаде умножения имелся третий умножитель для генерации действительной части сигнала обратной связи, а кроме этого, четвертый умножитель для генерации мнимой части сигнала обратной связи, причем третий умножитель умножает импульсный сигнал на действительную часть комплексно-сопряженного смешанного сигнала с частотой ω0, а четвертый умножитель умножает импульсный сигнал на мнимую часть комплексно-сопряженного смешанного сигнала с частотой ω0. Для смещения данного частотного компонента импульсного сигнала с частотой ω0 в нужном направлении умножение импульсного сигнала на смешанный сигнал должно выполняться в комплексной форме. Импульсный сигнал y(t) является действительным сигналом, тогда как комплексно-сопряженный смешанный сигнал может быть представлен в виде  Посредством комплексного умножения, таким образом, генерируется комплексный сигнал обратной связи с действительной частью y(t)·cos(ω0t) и мнимой частью y(t)·sin(ω0t).
Посредством комплексного умножения, таким образом, генерируется комплексный сигнал обратной связи с действительной частью y(t)·cos(ω0t) и мнимой частью y(t)·sin(ω0t).
Предпочтительно, чтобы импульсный модулятор подавал тактовые импульсы на частоте дискретизации ωA, которая была бы от 2 до 1000 раз выше частоты микширования ω0. Это необходимо для соблюдения критерия устойчивости Найквиста для смешанных сигналов.
Согласно более предпочтительному варианту осуществления изобретения импульсный модулятор реализуют при помощи цифрового сигнального процессора ЦСП (digital signal processor, DSP). Все операции, необходимые для работы импульсного модулятора, могут быть запрограммированы при помощи общепринятых методик обработки сигналов.
Согласно данному изобретению схема возбуждения микромеханического резонатора должна иметь по меньшей мере один импульсный модулятор указанного выше типа. Импульсный сигнал, генерируемый по меньшей мере одним импульсным модулятором, предпочтительно использовать для электростатического возбуждения осцилляции резонатора. Генерируемый импульсный сигнал может быть подключен непосредственно к электродам возбуждения резонатора. В этом случае предпочтительно, чтобы частота микширования ω0 импульсного модулятора соответствовала одной из резонансных частот резонатора, поскольку это необходимо для эффективного возбуждения осциллятора.
Генератор частоты согласно данному изобретению, используемый для синтеза импульсного сигнала на предварительно установленной частоте и фазе, имеет по меньшей мере один импульсный модулятор указанного выше типа. Импульсный модулятор согласно данному изобретению может быть использован для генерирования соответствующего импульсного сигнала y(t) на предварительно заданной частоте и фазе. В этом случае фазовый угол генерируемого импульсного сигнала может быть с высокой точностью задан посредством установки соотношения действительной и мнимой частей входного сигнала x(t). В результате получается импульсный сигнал с низким уровнем шума в области ω0.
Согласно еще одному предпочтительному варианту осуществления изобретения после импульсного модулятора размещают полосовой фильтр, желательно кварцевый или (пьезо)керамический. Этот располагающийся далее полосовой фильтр задерживает те частотные составляющие, которые удалены от области ω0 и в которых велик уровень шума.
Изобретение описано далее более подробно на примере наиболее предпочтительных вариантов осуществления с указанием ссылок на чертежи, поясняющие описываемые иллюстрационные варианты осуществления изобретения, а именно:
на фиг.1 показана комплексная блок-схема импульсного модулятора, соответствующего данному изобретению;
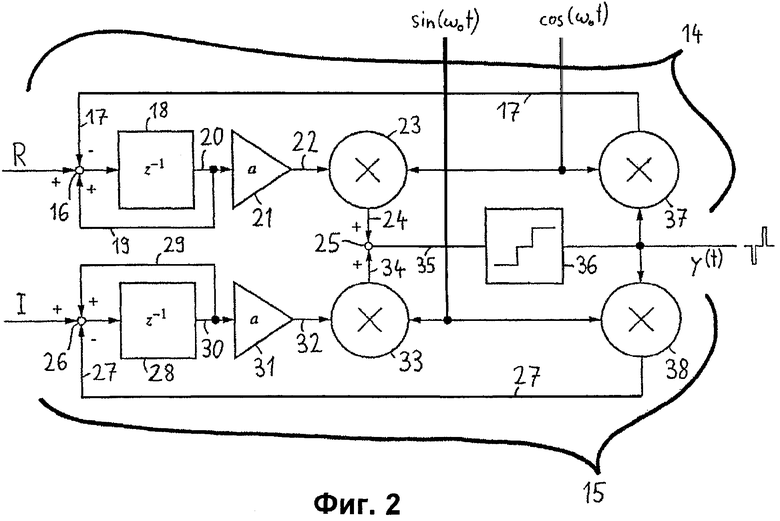
на фиг.2 показана блок-схема импульсного модулятора с указанием по отдельности синфазного и квадратурного трактов;
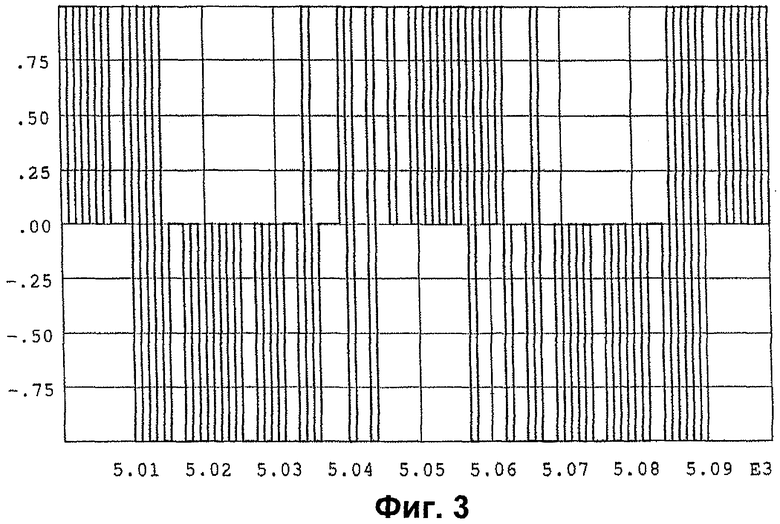
на фиг.3 показан квантованный по трем переменным импульсный сигнал y(t);
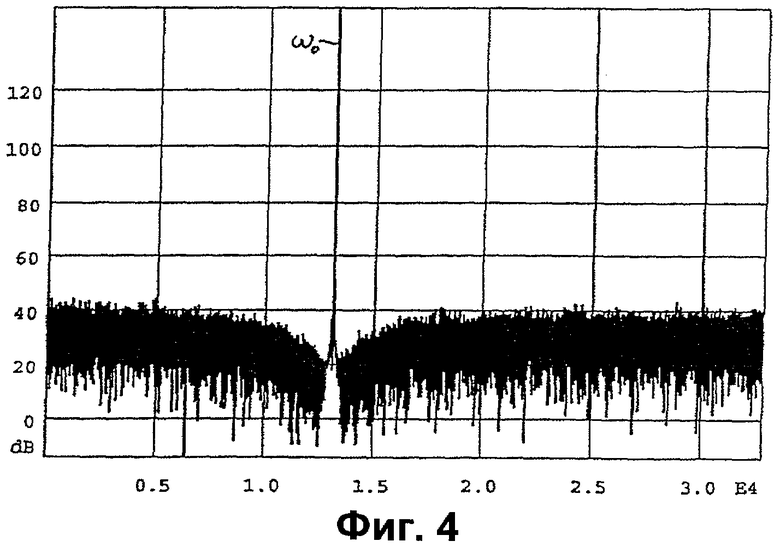
на фиг.4 приведен частотный спектр импульсного сигнала y(t), генерируемого на выходе квантователя;
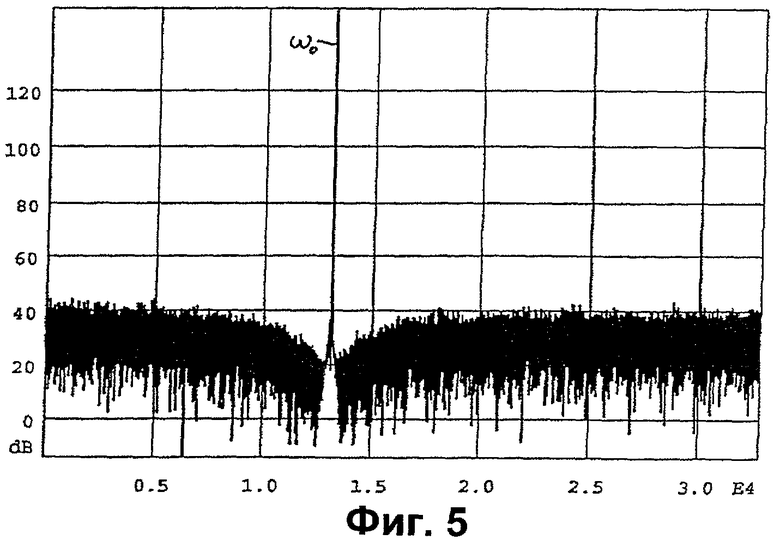
на фиг.5 приведен частотный спектр из фиг.4 после фильтрации микромеханическим осциллятором;
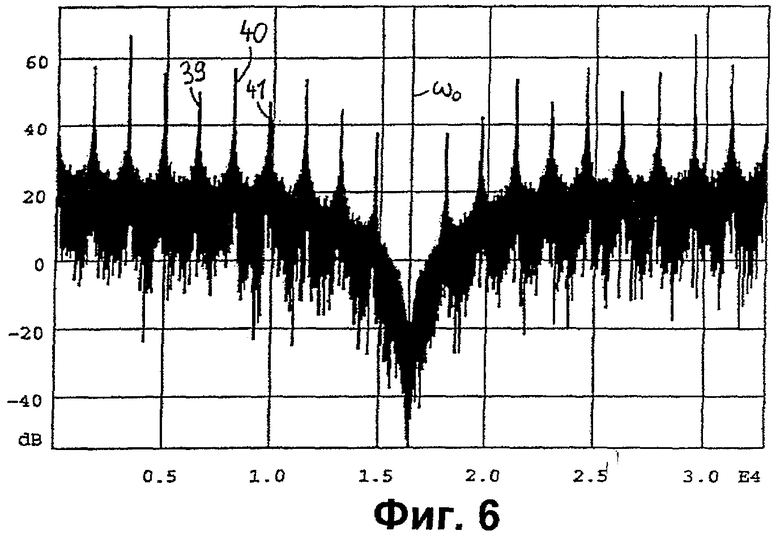
на фиг.6 показан частотный спектр импульсного сигнала y(t), построенный при соотношении частоты микширования к частоте дискретизации, равном ω0/ωA=0.25;
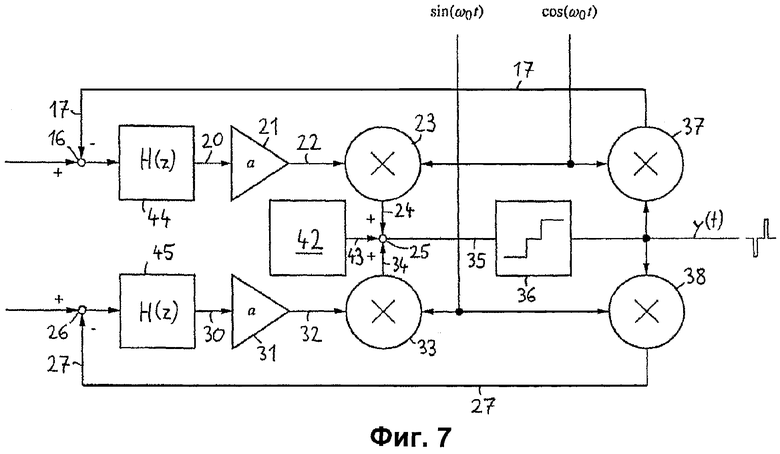
на фиг.7 показан импульсный модулятор с статистическим округлением;
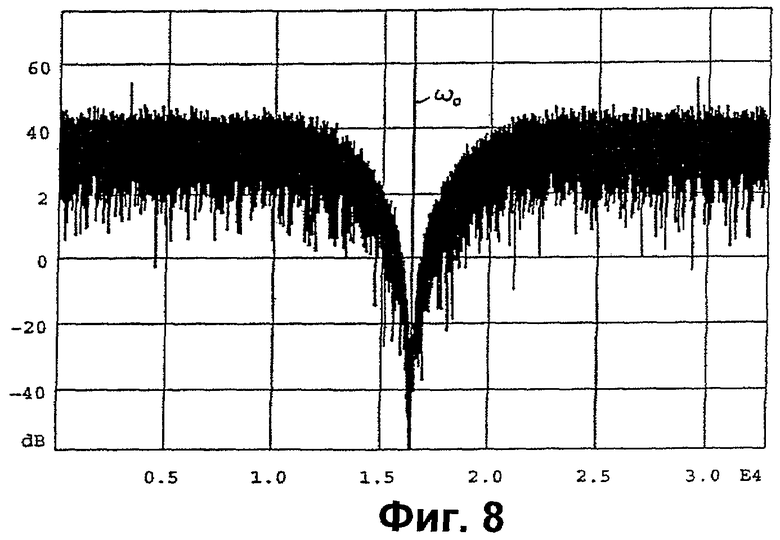
на фиг.8 показан частотный спектр из фиг.6 с выполняемым статистическим округлением; и
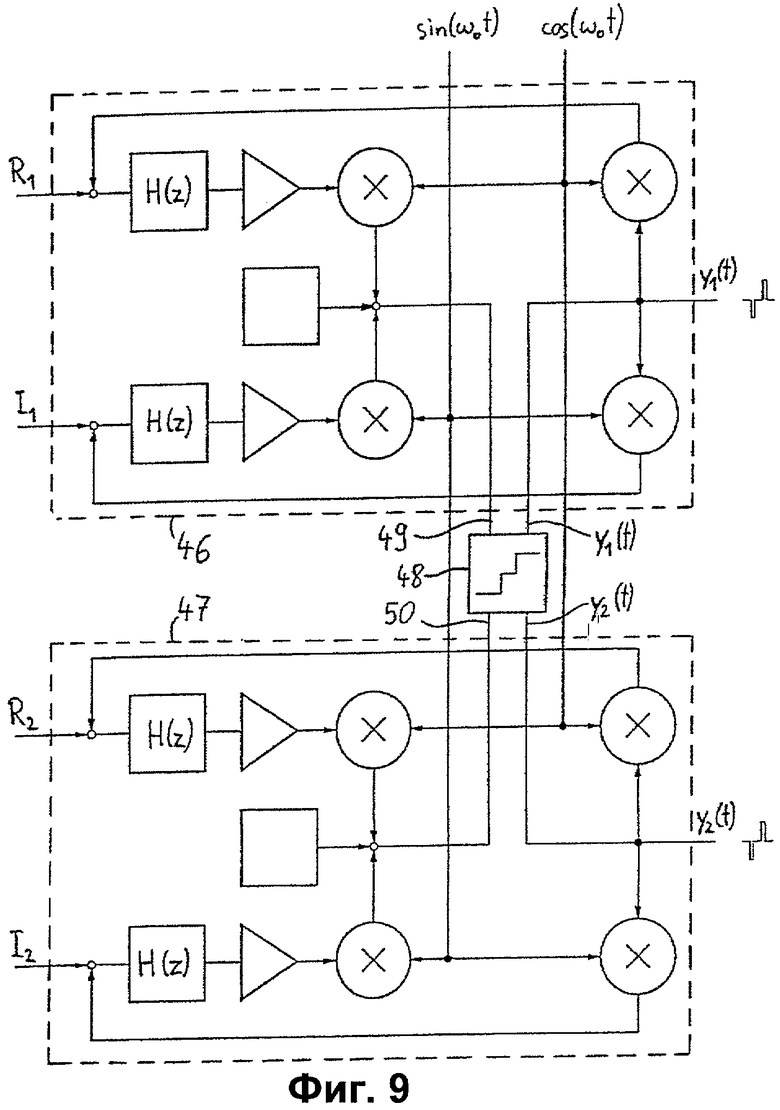
на фиг.9 показана блок-схема двумерного импульсного модулятора.
на фиг.1 показана в комплексном виде блок-схема импульсного модулятора, соответствующего положениям данного изобретения. Комплексный входной сигнал x(t) включает действительную и мнимую части, обе из которых представлены в цифровом виде. Комплексный сигнал обратной связи 2 вычитается из комплексного входного сигнала x(t) в узле сложения 1, причем по разнице между двумя этими комплексными сигналами определяется ошибка регулирования. Кроме того, (опять же комплексное) содержание элемента задержки 3 суммируется с указанной разностью узла сложения 1. Содержимое элемента задержки 3 поступает через сигнальную линию 4 на узел сложения 1. Элемент задержки 3 вместе с сигнальной линией 4 образует каскад комплексного интегратора, в котором выполняется интегрирование комплексной ошибки регулирования, то есть разности между входным сигналом и сигналом обратной связи. Интегрированный сигнал 5 усиливается на коэффициент «а» в каскаде усиления 6, а усиленный сигнал 7 поступает на первый каскад умножения 8, где данный усиленный сигнал 7 умножают на комплексный смешанный сигнал  с получением сигнала 9, смещенного в верхний частотный диапазон с частотой ω0. Блок 10 определяет действительную часть комплексного суммированного сигнала 9, и полученная таким образом действительная часть 11 суммированного сигнала становится доступна для квантователя 12.
с получением сигнала 9, смещенного в верхний частотный диапазон с частотой ω0. Блок 10 определяет действительную часть комплексного суммированного сигнала 9, и полученная таким образом действительная часть 11 суммированного сигнала становится доступна для квантователя 12.
В варианте осуществления изобретения, приведенном на фиг.1, квантователь 12 представлен квантователем по трем переменным, который преобразует соответствующий входной сигнал в три возможных значения -1, 0, +1 импульсного сигнала посредством компараторов. Полученный таким образом квантованный импульсный сигнал y(t) может подаваться на выход квантователя 12. Действительный импульсный сигнал y(t) умножается во втором каскаде умножения 13 на комплексно-сопряженный смешанный сигнал  для получения комплексного сигнала обратной связи 2. Полученный умножением действительного числа и комплексного числа комплексный сигнал обратной связи 2 поступает на узел сложения 1 на входе схемы.
для получения комплексного сигнала обратной связи 2. Полученный умножением действительного числа и комплексного числа комплексный сигнал обратной связи 2 поступает на узел сложения 1 на входе схемы.
Последовательность функциональных блоков, приведенная на фиг.1, может реализовываться посредством ЦСП или аппаратными средствами, предназначенными специально для этой цели. ЦСП должен в таком случае работать на частоте дискретизации ωA, которая значительно выше частоты ω0 комплексного смешанного сигнала. Например, частота дискретизации ωA может превышать частоту микширования ω0 от 2 до 1000 раз.
На фиг.2 снова показан импульсный модулятор, изображенный на фиг.1, с приведенными по отдельности трактами синфазного сигнала и квадратурного сигнала. В верхней половине фиг.2 показан тракт 14 синфазного сигнала, который обрабатывает действительную часть R входного сигнала x(t). В нижней половине фиг.2 показан тракт 15 квадратурного сигнала, обрабатывающий мнимую часть I. Действительная часть ошибки регулирования определяется в блоке сложения 16 в синфазном тракте как разница между действительной частью R входного сигнала и действительной частью 17 сигнала обратной связи. Значение интегратора, хранящееся до этого момента в элементе задержки 18, складывается с ошибкой регулирования и затем передается через сигнальную линию 19 к блоку сложения 16. Вместе с сигнальной линией 19 элемент задержки 18 образует в данной операции интегратор  . Сложение действительной части ошибки регулирования и предыдущего значения интегратора приводит к получению нового значения интегратора, которое снова сохраняется в элементе задержки 18. Интегрированный сигнал 20 в тракте синфазного сигнала домножается на коэффициент «а» усилителем 21 и передается как усиленный сигнал 22 на первый умножитель 23. Первый умножитель 23 умножает действительный усиленный сигнал 22 на действительный сигнал cos(ω0t), то есть на реальную часть
. Сложение действительной части ошибки регулирования и предыдущего значения интегратора приводит к получению нового значения интегратора, которое снова сохраняется в элементе задержки 18. Интегрированный сигнал 20 в тракте синфазного сигнала домножается на коэффициент «а» усилителем 21 и передается как усиленный сигнал 22 на первый умножитель 23. Первый умножитель 23 умножает действительный усиленный сигнал 22 на действительный сигнал cos(ω0t), то есть на реальную часть  Первый умножитель 23 определяет результирующий R·cos(ω0t), который подается как сигнал 24 на сумматор 25.
Первый умножитель 23 определяет результирующий R·cos(ω0t), который подается как сигнал 24 на сумматор 25.
Тракт 15 квадратурного сигнала импульсного модулятора имеет узел сложения 26, в котором рассчитывается разница между мнимой частью I входного сигнала и мнимой частью 27 сигнала обратной связи. Эта разница, соответствующая мнимой части ошибки регулирования, складывается с предыдущим значением элемента задержки 28, которое поступает на блок сложения 26 через сигнальную линию 29. Новое значение, полученное как сумма предыдущего значения и мнимой части ошибки регулирования, сохраняют в элементе задержки 28. Вместе с сигнальной линией 29 элемент задержки 28 образует в данной операции интегратор  . Интегрированный сигнал 30 от тракта квадратурного сигнала поступает на выход данного интегратора и затем умножается на коэффициент «а» усилителем 31. Усиленный сигнал 32, полученный таким образом в тракте квадратурного сигнала, затем умножают на сигнал sin(ω0t) во втором умножителе 33. Результирующий I·sin(ω0t), полученный таким образом, подают как сигнал 34 на сумматор. 25. Сумматор 25 складывает сигналы R·cos(ω0t) и I·sin(ω0t) с получением на выходе сигнала R·cos(ω0t)+I·sin(ω0t) как сигнала 35. Однако этот сигнал 35 точно соответствует действительной части смешанного сигнала, поскольку комплексное умножение x(t)
. Интегрированный сигнал 30 от тракта квадратурного сигнала поступает на выход данного интегратора и затем умножается на коэффициент «а» усилителем 31. Усиленный сигнал 32, полученный таким образом в тракте квадратурного сигнала, затем умножают на сигнал sin(ω0t) во втором умножителе 33. Результирующий I·sin(ω0t), полученный таким образом, подают как сигнал 34 на сумматор. 25. Сумматор 25 складывает сигналы R·cos(ω0t) и I·sin(ω0t) с получением на выходе сигнала R·cos(ω0t)+I·sin(ω0t) как сигнала 35. Однако этот сигнал 35 точно соответствует действительной части смешанного сигнала, поскольку комплексное умножение x(t)  и дает:
и дает:
 =(R+j·I)·(cos(ω0t)-j·sin(ω0t))=
=(R+j·I)·(cos(ω0t)-j·sin(ω0t))=
=[ R·cos(ω0t)+I·sin(ω0t)]+j·[I·cos(ω0t)-R·sin(ω0t)]
и действительная часть этого сигнала равна R·cos(ω0t)+I·sin(ω0t). Сигнал 35, таким образом, представляет действительную часть комплексного смешанного сигнала и в этом смысле соответствует сигналу 11, показанному на фиг.1.
Цифровой действительный сигнал 35 подают на квантователь 36, в котором выполняется преобразование этого входного сигнала в квантованный импульсный сигнал y(t). Трехкаскадный (квантование по трем переменным) квантователь, приведенный в примерах фиг.1 и фиг.2, квантует входной сигнал по алгоритму y(t)∈{-1; 0; +1}. Для этого в квантователе 36 имеются компараторы, в которых происходит непрерывное сравнение уровня сигнала 35 с предварительно установленными пороговыми значениями. В зависимости от результатов сравнения выходному сигналу y(t) в каждом отдельном случае назначается одно из значений -1; 0; +1 как значение текущего сигнала. Вместо трехкаскадного (по трем переменным) квантования в зависимости от применения могут использоваться другие типы квантования, например двухкаскадное (по двум переменным) или многокаскадное квантование.
Действительную часть 17 и мнимую часть 27 комплексного сигнала обратной связи получают из квантованного импульсного сигнала y(t). Для этого импульсный сигнал y(t) умножают на комплексно-сопряженный смешанный сигнал 
 =y(t)·cos(ω0t)+j·y(t)·sin(ω0t)
=y(t)·cos(ω0t)+j·y(t)·sin(ω0t)
Действительная часть y(t)·cos(ω0t) комплексного сигнала обратной связи генерируется третьим умножителем 37, выполняющим умножение импульсного сигнала y(t) на cos(ω0t). Действительная часть 17 сигнала обратной связи таким образом генерируется как выходной сигнал третьего умножителя 37 и возвращается на блок сложения 16. Для генерации действительной части y(t)·sin(ω0t) комплексного сигнала обратной связи импульсный сигнал y(t) умножается на sin(ω0t) в четвертом умножителе 38. Мнимая часть 27 сигнала обратной связи таким образом генерируется как выходной сигнал четвертого умножителя 38 и возвращается на блок сложения 26.
В приведенных в качестве примера вариантах осуществления изобретения, показанных на фиг.1 и 2, на стороне входа располагаются интеграторы, которые интегрируют ошибку регулирования между входным сигналом и сигналом обратной связи; таким образом генерируя интегрированный сигнал. Функция преобразования H(z) интегратора может быть записана как  . На входной стороне вместо интеграторов также допускается применение других каскадов преобразования сигнала с другими функциями преобразования H(z). Например, высокоуровневые функции преобразования H(z) могут использоваться в случае, если:
. На входной стороне вместо интеграторов также допускается применение других каскадов преобразования сигнала с другими функциями преобразования H(z). Например, высокоуровневые функции преобразования H(z) могут использоваться в случае, если:
lim H(z)=∞
z→1.
Функция преобразования H(z), таким образом, стремится к бесконечности, если частота ω стремится к нулю (z→1). Дополнительные свободные параметры H(z) могут использоваться для оптимизации отдельных характеристик модулятора (например, соотношения сигнал/шум) или же всей системы.
На фиг.3 показана форма импульсного сигнала y(t), который может быть получен на выходе квантователя в случае квантования по трем переменным с y(t)∈{-1; 0; +1}, полученная путем машинного моделирования. При этом значение действительной части R комплексного входного сигнала установили равным 0.3, тогда как значение мнимой части I взяли равным нулю. Входной сигнал x(t) таким образом был постоянен и не являлся функцией от времени. Частота дискретизации ωA в пять раз превышала частоту микширования, т.е. ω0/ωA=0.2. Тактовые импульсы на частоте дискретизации ωA отложены по абсциссе и последовательно пронумерованы от 5000 до 5100. В течение каждого такта импульсный сигнал y(t) принимает одно из трех возможных значений: -1; 0; +1. Соответствующее значение y(t) для каждого отдельно такта при частоте дискретизации откладывается по оси ординат.
Результаты спектрального анализа (FFT) импульсного сигнала на фиг.3 приведены на фиг.4. Частоты соответствующих спектральных составляющих показаны в произвольных единицах FFT по оси абсцисс, а интенсивность сигнала в дБ нанесена на ось ординат. В спектральном распределении хорошо видны пики на частоте ω0. Также видно, что уровень шума в области, прилежащей к частоте ω0, значительно ниже, чем в остальной части спектра. В отличии от традиционных сигма-дельта модуляторов уровень шума значительно понижается именно в диапазоне низких частот, то есть в области, прилежащей к частоте ω0. В случае импульсного модулятора, соответствующего положениям данного изобретения, интегрированный и усиленный сигнал смещается на частоту микширования ω0 посредством комплексного умножения. Как следствие, спектральный диапазон, в котором происходит наиболее эффективное подавление шума, также смещен в направлении частоты микширования ω0 с получением шумовых характеристик, показанных на фиг.4.
Импульсный модулятор, соответствующий положениям данного изобретения, может использоваться для цифровой генерации импульсного сигнала, и в этом случае основная спектральная составляющая импульсного сигнала может быть задана через частоту микширования ω0. Фазовый угол генерируемого импульсного сигнала может быть очень точно задан посредством установки соотношения действительной и мнимой частей входного сигнала, обеспечивая таким образом стабильность фазы импульсного сигнала. При использовании импульсного модулятора, соответствующего положениям данного изобретения, для синтеза частот импульсный сигнал y(t) следует пропускать через электрический полосовой фильтр, середина полосы пропускания которого находится на частоте ω0. Данный полосовой фильтр, реализованный, например, как кварцевый полосовой фильтр или (пьезо)керамический фильтр, позволяет подавлять спектральные диапазоны, удаленные от ω0, в которых довольно высок уровень шума. Подобный полосовой фильтр также позволяет значительно повысить соотношение сигнал/шум.
Импульсный модулятор, соответствующий положениям данного изобретения, пригоден, в числе прочего, для возбуждения электромеханических осцилляторов с целью генерирования гармонических колебаний. В частности, электростатические силы, необходимые для возбуждения осцилляции, могут генерироваться посредством квантованного по трем переменным импульсного сигнала, подаваемого на электроды возбуждения микромеханического резонатора. Частоту ω0 импульсного сигнала y(t) в этом случае предпочтительно выбирать равной резонансной частоте микромеханического осциллятора. Если импульсный сигнал, подобный приведенному на фиг.3 и фиг.4, используется для гармонического возбуждения осциллятора с высоким коэффициентом добротности (например, с коэффициентом добротности, равным 104), резонансная частота которого соответствует частоте возбуждения ω0, то основная часть шума квантования будет отфильтровываться самим осциллятором. В частности, шум квантования в спектральных диапазонах, удаленных от частоты настройки ω0, подавляется самим осциллятором. Получаемый таким образом отфильтрованный спектр приведен на фиг.5.
Существуют некоторые отношения частот ω0/ωA, для которых шумоподобный продукт квантования в y(t) преобразуется в ряд более или менее периодических функций. В качестве примера на фиг.6 показан частотный спектр, полученный для отношения ω0/ωA=0,25. Кроме пика на частоте ω0 виден диапазон спектральных линий 39, 40, 41 и т.д. Причиной образования данных спектральных линий является то, что квантователь представляет собой высоко нелинейный элемент контура регулирования, и таким образом возбуждаются релаксационные колебания в контуре регулирования при определенных отношениях частот. Ответная реакция контура регулирования хорошо известна по традиционным дельта-сигма преобразователям.
Для предотвращения релаксационных колебаний можно повысить центральную линейность квантователя путем добавления шумового сигнала к входному сигналу квантователя. Для данной задачи предпочтительно использовать спектрально равномерно распределенный шумовой сигнал. На фиг.7 показана блок-схема соответствующего усовершенствованного импульсного модулятора. По сравнению с блок-схемой, приведенной на фиг.2, импульсный модулятор, показанный на фиг.7, дополнительно содержит генератор 42 шума 42, генерирующий шумовой сигнал 43. В дополнение интеграторы, приведенные на фиг.2, на данном чертеже показаны в общем виде как каскады 44, 45 преобразования сигнала с функцией преобразования H(z). Во всем остальном узлы, приведенные на фиг.7, соответствуют элементам блок-схемы фиг.2. Шумовой сигнал 43 поступает на сумматор 25, где выполняется его сложение с сигналами 24 и 34. Следовательно, на сигнал 35 на входе квантователя 36 накладывается шумовой сигнал, что в итоге приводит к статическому округлению в процессе квантования. На фиг.8 показан частотный спектр импульсного сигнала y(t), полученного при помощи усовершенствованного импульсного модулятора, приведенного на фиг.7. Хотя отношение частот ω0/ωA также равно 0,25, релаксационные колебания не образуются.
Импульсный модулятор, соответствующий положениям данного изобретения, может использоваться, в частности, для электростатического возбуждения микромеханических осцилляторов. Для этого в качестве примера на электроды возбуждения микромеханического резонатора может быть подан квантованный по трем переменным импульсный сигнал указанного на фиг.3 типа. Импульсный сигнал, приведенный на фиг.3, представляет собой синусоидальный сигнал на частоте ω0. Подобный импульсный сигнал можно использовать для возбуждения гармонических колебаний микромеханического резонатора на частоте ω0, точнее говоря, в том случае, когда частота ω0 импульсного сигнала по меньшей мере приблизительно соответствует резонансной частоте осциллятора.
Резонаторы, способные производить колебания по двум взаимно перпендикулярным направлениям y1 и y2, используются в датчиках скорости вращения и гироскопах. Показанный на фиг.9 двумерный импульсный модулятор может применяться для электростатического возбуждения резонатора с двумя степенями свободы. Двумерный импульсный модулятор содержит первый импульсный модулятор 46, генерирующий импульсный сигнал y1(t) на основе комплексного входного сигнала R1, I1, при этом полученный импульсный сигнал используется для возбуждения резонатора в направлении y1. Импульсный сигнал y2(t) генерируется на основе комплексного входного сигнала R2, I2 вторым импульсным модулятором 47 и используется для возбуждения резонатора в направлении y2. Как первый импульсный модулятор 46, так и второй импульсный модулятор 47 представляют собой импульсные модуляторы со статистическим округлением, аналогичные приведенным на фиг.7. Описание конструкции и способов работы первого и второго импульсных модуляторов 46, 47 может быть, следовательно, найдено в описании фиг.2 и 7. Однако двумерный импульсный модулятор, приведенный на фиг.9, имеет один двумерный квантователь 48, который поделен на два канала и который преобразует сигнал 49 первого импульсного модулятора 46 в квантованный импульсный сигнал y1(t), а сигнал 50 второго импульсного модулятора 47 - в квантованный импульсный сигнал y2(t). Использование двумерного квантователя 48, поделенного на два канала, позволяет в ходе квантования сигналов 49, 50 учитывать дополнительные условия, что является важным преимуществом при эксплуатации микромеханических датчиков. Например, одним из таких дополнительных условий является то, что в каждом случае только один канал может генерировать импульсы, отличные от нуля. Другим возможным условием является то, что выходные сигналы y1(t), y2(t) могут в любое время изменяться. Подобные дополнительные условия могут принести реальную пользу в случае, если токи смещения, подаваемые на электроды двойного резонатора, измеряются суммарно, что позволяет вычитать отклонение осциллятора. Дополнительные условия позволяют однозначно связывать ток смещения с отдельным электродом. Таким образом появляется возможность выполнять разнесение сигнала между сигналами, вызванными отклонением осциллятора в направлении y1 и отклонением в направлении y2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ КОРИОЛИСОВА ГИРОСКОПА И ЭЛЕКТРОННЫЙ БЛОК КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2328701C2 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И СПОСОБ ОБРАБОТКИ СИГНАЛОВ | 2010 |
|
RU2510128C1 |
| СПОСОБ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ ГЕТЕРОДИНА В КОГЕРЕНТНОМ СЛЕДЯЩЕМ ПРИЕМНИКЕ ШУМОПОДОБНОГО СИГНАЛА | 2005 |
|
RU2305909C2 |
| Дискретный согласованный фильтр | 1985 |
|
SU1343548A1 |
| Время-импульсный анализаторСигНАлА | 1979 |
|
SU817725A1 |
| Дискретный адаптивный дельта-модулятор | 1976 |
|
SU641647A1 |
| СПОСОБ ЧАСТОТНОЙ МОДУЛЯЦИИ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2595638C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКОГО МОМЕНТА УПРАВЛЯЮЩЕГО ДВИГАТЕЛЯ-МАХОВИКА | 2020 |
|
RU2736411C1 |
| Дискретный согласованный фильтр | 1983 |
|
SU1169147A1 |
Предлагаемый импульсный модулятор содержит каскад вычитания, который генерирует сигнал ошибки регулирования на основе разницы между комплексным входным сигналом и сигналом обратной связи, а также каскад преобразования сигнала, который преобразует сигнал ошибки регулирования в управляющий сигнал. Управляющий сигнал умножается на комплексный смешанный сигнал с частотой ω0 в первом каскаде умножения. По меньшей мере одна из действительной и мнимой частей смещенного в верхний частотный диапазон управляющего сигнала затем квантуется каскадом квантования с получением таким образом действительного импульсного сигнала. Импульсный сигнал затем используется для получения сигнала обратной связи для каскада вычитания, находящегося в блоке обратной связи. Импульсный модулятор позволяет осуществить гибкое регулирование спектрального распределения шума квантования, то есть сместить диапазон подавленного шума квантования в сторону необходимой рабочей частоты ω0. 4 н. и 27 з.п. ф-лы, 9 ил.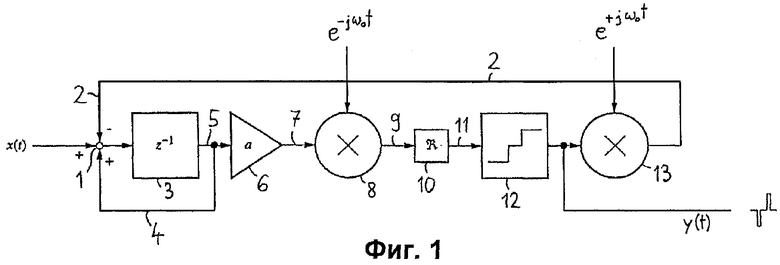
каскад вычитания (1), генерирующий сигнал ошибки регулирования на основе разности между комплексным входным сигналом (x(t)) и сигналом обратной связи (2),
один каскад преобразования, преобразующий сигнал ошибки регулирования в управляющий сигнал (7);
первый каскад умножения (8), в котором выполняется умножение управляющего сигнала (7) на комплексный смешанный сигнал, имеющий частоту колебаний ω0, с получением таким образом по меньшей мере одной из действительной (11) и мнимой частей управляющего сигнала, смещенного в верхний частотный диапазон на ω0;
каскад квантования (12), в котором выполняется квантование по меньшей мере одной из действительной и мнимой частей управляющего сигнала, смещенного в верхний частотный диапазон на ω0, с получением таким образом импульсного сигнала (y(t));
блок обратной связи, который на основе импульсного сигнала (y(t)) генерирует сигнал (2) обратной связи для каскада вычитания.
генерирование сигнала ошибки регулирования на основе разности между комплексным входным сигналом (x(t)) и сигналом (2) обратной связи;
преобразование сигнала ошибки регулирования в управляющий сигнал (7);
умножение управляющего сигнала (7) на комплексный смешанный сигнал, имеющий частоту колебаний ω0, с получением таким образом по меньшей мере одной из действительной (11) или мнимой части управляющего сигнала, смещенного в верхний частотный диапазон на ω0;
квантование по меньшей мере одной из действительной (11) и мнимой частей управляющего сигнала, смещенного в верхний частотный диапазон на ω0, с получением импульсного сигнала (y(t));
генерирование сигнала обратной связи (2) на основе импульсного сигнала (y(t)).
| US 6317468 В1, 13.11.2001 | |||
| Модулятор дельта-сигма | 1982 |
|
SU1336958A3 |
| Дельта-сигма-модулятор | 1988 |
|
SU1599992A1 |
| US 5701106, 23.12.1997 | |||
| US 6111531 A, 29.08.2000. | |||

