Изобретение относится к области электротехники, в частности, к астатическим системам управления динамическими моментами управляющих двигателей-маховиков (УДМ), выполненных на основе синхронного двигателя с постоянными магнитами, применяемых в качестве электромеханических исполнительных органов систем ориентации и стабилизации космических аппаратов.
Наиболее близким к заявленному изобретению по своей технической сущности является способ, реализованный в прецизионной частотно-фазовой системе регулирования скорости вращения электропривода [Патент РФ №2291552, БИПМ №1, опубл. 10.01.2007], заключающийся в преобразовании напряжения управления в два низкочастотных сигнала sin Ω3t и cos Ω3t, суммировании этих сигналов с опорными сигналами повышенной частоты sin ω0t и cos ω0t и формировании коротких импульсов в моменты перехода результирующих сигналов через нуль, суммировании сигналов положения ротора sin Ωврt и cos Ωвpt с опорными сигналами повышенной частоты sin ω0t и cos ω0t и формировании коротких импульсов в момент перехода результирующих сигналов через нуль и получении разностного сигнала из этих двух импульсных сигналов, которые используются для регулирования скорости вращения УДМ.
Основным недостатком указанного изобретения является необходимость использования большого количества операций умножения для преобразования сигналов, так как для получения суммарного гармонического сигнала необходимо произвести четыре операции умножения. Как известно, аналоговое умножение обладает большой погрешностью и смещением нулевого уровня, что становится критично при определении переходов результирующих сигналов через нуль и ведет к снижению точности регулирования скорости вращения УДМ. А цифровое умножение вносит определенные временные задержки и является сложным в реализации и требует большого количества вычислительных ресурсов.
Техническим результатом, на достижение которого направлено предложенное изобретение, является уменьшение количества преобразований гармонических сигналов, за счет чего удается достичь увеличения быстродействия контура управления и упрощение структуры электропривода при регулировании динамического момента двигателя-маховика, что приводит к уменьшению его массы и повышению надежности.
Технический результат достигается при использовании регулятора скорости вращения двигателя, датчика положения ротора, синусно-косинусного генератора опорной частоты, умножителей, формирователя импульсных сигналов, интегратора управляющих сигналов динамического момента для формирования задающей частоты вращения двигателя-маховика, преобразователя сигналов с датчика положения ротора в цифровой код текущей частоты вращения двигателя-маховика и цифрового сумматора, определяющего разностный сигнал задающей и текущей частоты.
Предлагаемый способ регулирования динамического момента УДМ, так же как и прототип основан на суммировании выходных сигналов датчика положения ротора sin Ωвpt и cos Ωвpt с опорными сигналами повышенной частоты sin ω0t и cos ω0t и формировании импульсных сигналов в моменты перехода результирующих сигналов sin(Ωвр+ω0)t и cos (Ωвр+ω0) t через нуль.
Согласно предложенному способу напряжение управления интегрируется для получения мгновенных значений задающей частоты в виде цифрового кода с темпом изменения, пропорциональным сигналу управления динамическим моментом, а импульсный сигнал, полученный в моменты перехода результирующих сигналов sin(Ωвр+ω0)t и cos(Ωвр+ω0)t через нуль, является разрешающим для преобразования частоты вращения в цифровой код, являющийся мгновенным значением частоты вращения двигателя, после чего разность полученных кодов используется для регулирования частоты вращения.
За счет приведения к мгновенному значению частоты гармонических сигналов sin(Ωвр+ω0)t и cos(Ωвр+ω0)t и интегрирования напряжения управления появляется возможность сократить количество операций сложения гармонических сигналов вдвое, тем самым убирая избыточные элементы и упрощая структуру электропривода.
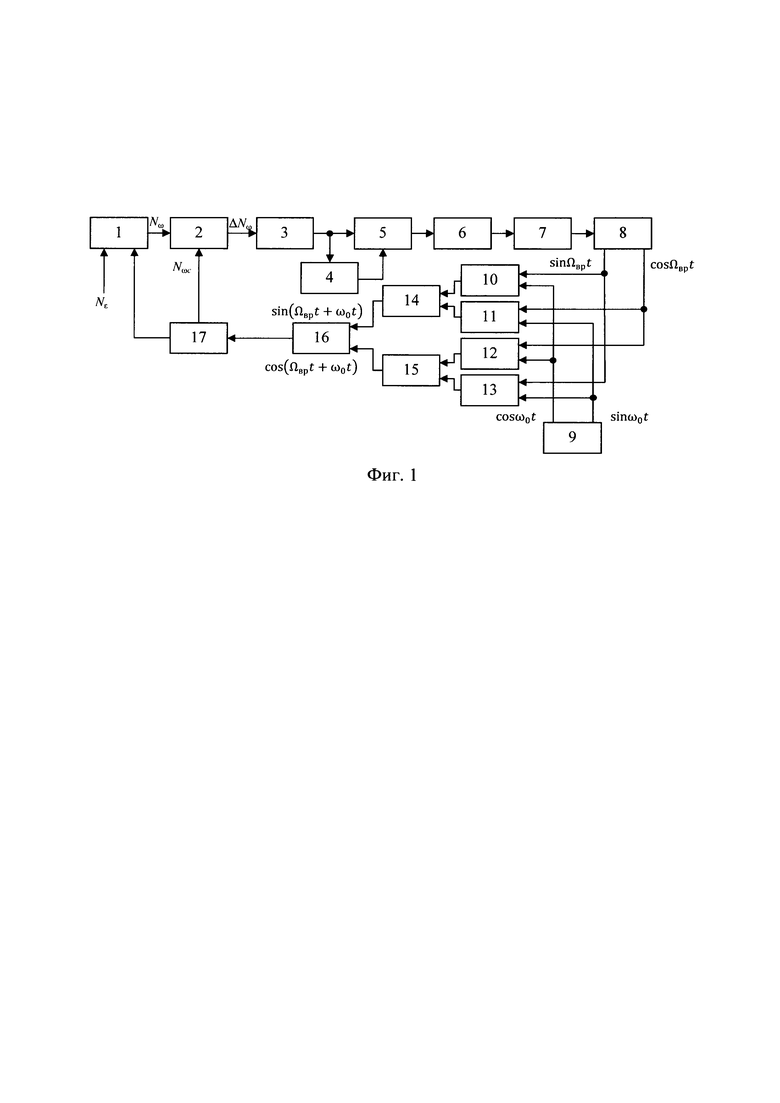
На фиг. 1 приведена структурная схема устройства, поясняющая заявляемый способ.
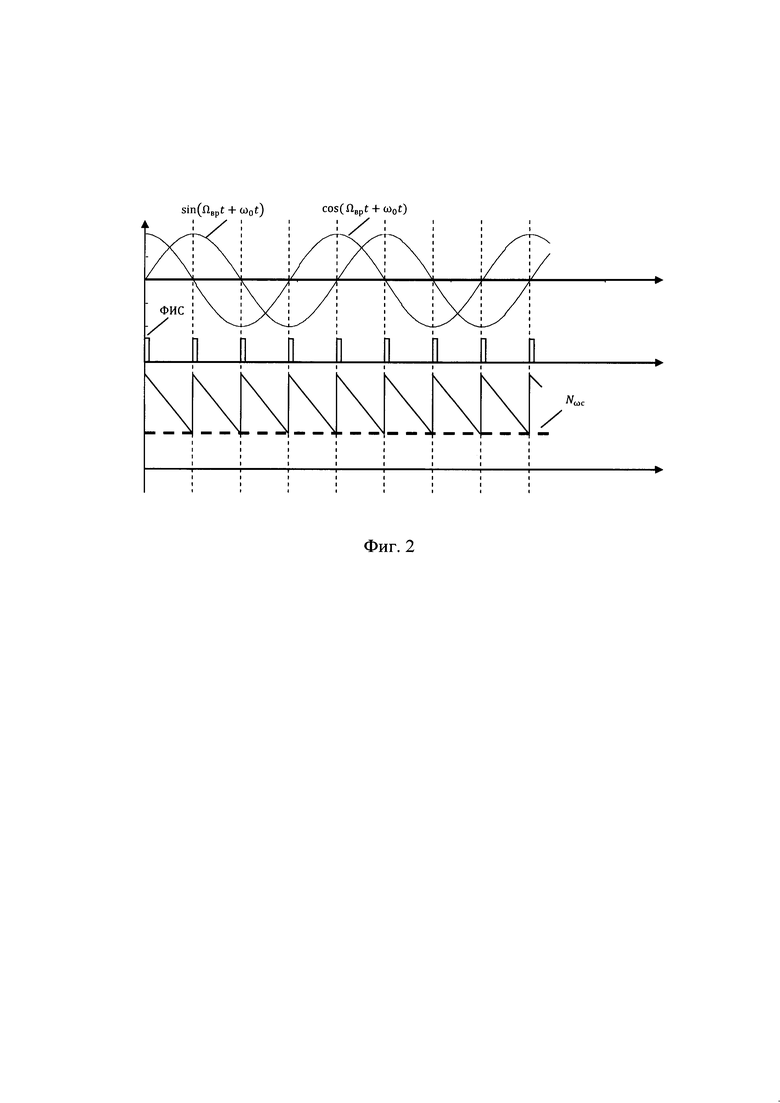
На фиг. 2. Приведены диаграммы работы преобразователя частота-код.
Устройство содержит: интегратор сигнала ускорения (ИСУ) 1 подключенный к первому входу цифрового сумматора вычитателя (ЦСВ) 2, выход которого подключен к цифровому фильтру (ЦФ) 3; выход цифрового фильтра соединен с цифровым динамическим корректором (ЦДК) 4 и первым входом второго ЦСВ 5; выход ЦСВ подключается к регулятору скорости вращения двигателя 6, который в свою очередь подключается к УДМ 7; УДМ соединен с синусно-косинусным датчиком положения ротора (ДПР) 8, первый выход которого подключается к первым входам умножителей 10 и 13, второй выход подключается к первым входам умножителей 11 и 12; на вторые входы умножителей 10 и 12 подается сигнал с первого выхода синусно-косинусного генератора опорной частоты (ГОЧ) 9, а на вторые входы умножителей 11 и 13 подключается второй выход ГОЧ; выходы умножителей 10 и 11 подключаются к входам сумматора 14, выходы умножителей 12 и 13 подключаются к входам сумматора 15; выходы сумматоров подключаются на входы формирователя импульсных сигналов (ФИС) 16, выход которого подключен к входу преобразователя частота-код (ПЧК) 17, один из выходов которого подключается ко второму входу ЦСВ 2, второй выход подключается ко второму входу ИСУ.
Используемые в устройстве, реализующем предлагаемый способ, узлы могут быть выполнены следующим образом.
Все узлы, за исключением регулятора скорости вращения двигателя и ДПР, возможно реализовать на микроконтроллере, микропроцессоре или ПЛИС, с применением аналогово-цифровых преобразователей для ИСУ.
Регулятор скорости вращения двигателя может быть построен на основе операционных усилителей.
В качестве датчика положения ротора можно использовать сельсин, или вращающийся трансформатор.
Способ реализуется следующим образом: сигналы с ДПР 8 поступают на входы преобразователей частоты, каждый из которых состоит из двух умножителей (10, 11 и 12, 13) и одного сумматора (14 и 15), частота сигналов ДПР суммируется с опорной частотой сигналов, поступающих от ГОЧ 9. По переходам преобразованного сигнала через нуль в ФИС 16 формируются импульсы короткой длительности, которые являются разрешающими для работы ПЧК 17. На выходе ПЧК формируется мгновенное значение частоты вращения УДМ в виде цифрового кода Nωс, поступающего на ЦСВ 2.
С другой стороны на выходе ИСУ 1 формируется мгновенное значение задающей частоты ω3 с ускорением, пропорциональным входному управляющему сигналу динамического момента Nε в виде цифрового кода Nω. Код Nω поступает на второй вход ЦСВ 2, где из него вычитается код Nωc. Полученный результат ΔNω поступает на вход ЦФ 3, после чего поступает на ПИ-регулятор 4-5, управляющий регулятором скорости вращения 6.
Как видно из фиг. 2, код на выходе ГГЧК формируется с частотой в 4 раза большей, чем частота сигналов sin(Ωвр+ω0)t и cos(Ωвр+ω0)t, благодаря чему обеспечивается высокая скорость реакции системы на изменение частоты вращения электропривода.
Для синхронизации начального значения ИСУ и текущей скорости вращения маховика (например, при переключении с основного канала питания на резервный) текущее значение ПЧК передается в ИСУ, где устанавливается, как начальное, после чего регулирование производится по описанной выше схеме.
Таким образом, предложенный способ решает поставленную задачу управления частотой вращения двигателя-маховика по сигналам динамических моментов, при этом устраняя обозначенные недостатки прототипа. Способ позволяет отрабатывать любые коды управления от максимального положительного до максимального отрицательного, а так же обеспечивает стабилизацию частоты вращения при нулевом управляющем сигнале динамического момента. Способ реализуем в устройстве, приведенном в описании.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ УПРАВЛЯЮЩЕГО ДВИГАТЕЛЯ-МАХОВИКА С КОНТРОЛЕМ ПАРАМЕТРОВ ВЫХОДНЫХ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК | 2021 |
|
RU2789698C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2609673C2 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ МОМЕНТОМ ДВИГАТЕЛЯ-МАХОВИКА | 2012 |
|
RU2521617C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Реверсивный вентильный электродвигатель | 1987 |
|
SU1431015A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
Изобретение относится к области электротехники, в частности, к астатическим системам управления динамическими моментами управляющих двигателей-маховиков (УДМ), выполненных на основе синхронного двигателя с постоянными магнитами, применяемых в качестве электромеханических исполнительных органов систем ориентации и стабилизации космических аппаратов. Техническим результатом, на достижение которого направлено предложенное изобретение, является уменьшение количества преобразований гармонических сигналов, за счет чего удается достичь увеличения быстродействия контура управления и упрощение структуры электропривода при регулировании динамического момента двигателя-маховика, что приводит к уменьшению его массы и повышению надежности. Способ регулирования динамического момента управляющего двигателя-маховика включает регулятор скорости вращения двигателя, датчик положения ротора, синусно-косинусный генератор опорной частоты, умножители, формирователь импульсных сигналов, интегратор управляющих сигналов динамического момента для формирования задающей частоты вращения двигателя-маховика, преобразователь сигналов с датчика положения ротора в цифровой код текущей частоты вращения двигателя-маховика и цифровой сумматор, определяющий разностный сигнал задающей и текущей частоты. 2 ил.
Способ регулирования динамического момента управляющего двигателя-маховика, включающий регулятор скорости вращения двигателя, датчик положения ротора, синусно-косинусный генератор опорной частоты, умножители, формирователь импульсных сигналов, отличающийся тем, что введен интегратор управляющих сигналов динамического момента для формирования задающей частоты вращения двигателя-маховика, преобразователь сигналов с датчика положения ротора в цифровой код текущей частоты вращения двигателя-маховика и цифровой сумматор, определяющий разностный сигнал задающей и текущей частоты.
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ МОМЕНТОМ ДВИГАТЕЛЯ-МАХОВИКА | 2012 |
|
RU2521617C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2609673C2 |
| US 7157878 B2, 02.01.2007 | |||
| EP 1263124 A3, 04.12.2002. | |||

