Изобретение относится к области сельского хозяйства и может быть использовано при механизации трудоемких процессов на животноводческих фермах и комплексах для очистки от навоза проходов в животноводческих помещениях для содержания животных.
Известны устройства для очистки проходов в животноводческих помещениях в виде приводного бесконечного цепного контура со складывающимися скребками, совершающего возвратно-поступательное перемещение скребков вдоль прохода животноводческого помещения со смещением навозной массы в сторону поперечного канала с навозоуборочным транспортером (см., например, авторские свидетельства на изобретение SU №820750, №841623, МПК А01К 1/01, 1979 г. и др.).
Известные устройства не обеспечивают автоматическое реверсирование механизма перемещения скребков, что снижает надежность работы механизма при использовании средств электроавтоматики, требующих настройки и квалифицированного обслуживания, а также не обеспечивают возможность остановки скребков при наезде на препятствие (животное), что приводит к травмированию животных при эксплуатации очистительного устройства в помещениях с беспривязным содержанием животных.
Наиболее близким аналогом по технической сущности и достигаемому техническому результату к заявляемому объекту является устройство для очистки поверхности от навоза, включающее горизонтально установленную с возможностью возвратно-поступательного перемещения приводную штангу, на рабочей поверхности которой продольно с шагом расположены зацепы, и взаимодействующий со штангой ползун, установленный с возможностью прерывисто-поступательного перемещения вдоль очищаемой поверхности под действием штанги, снабженный скребком и двуплечим балансирным захватом, шарнирно подвешенным над штангой на держателе с возможностью поворота в вертикальной плоскости. Захват под действием перемещаемого балансира с центром масс, расположенным под осью поворота захвата, одним плечом в рабочем положении взаимодействует с зацепом, а в нерабочем положении для автоматического реверсирования хода ползуна взаимодействует с одним из упоров, установленных у концов штанги, под действием которых захват переводится в новое рабочее положение с соответствующим переносом центра масс с одного плеча захвата на другое (см. авторское свидетельство SU на изобретение №1373375, МПК А01К 1/01, БИ №6, 1988 г. - ближайший аналог-прототип).
В известном устройстве при наезде на препятствие (как правило, животное) в зоне, не попадающей под воздействие щупа, не обеспечивается отключение захвата от штанги с остановкой ползуна со скребком, что не исключает возможность поломки механизма жестко зафиксированного в рабочем положении скребка при его наезде на препятствие, а также травмирования содержащихся животных, попадающих под воздействие движущихся жестких рабочих органов транспортера, например животных при беспривязном содержании лежащих в навозоочистительном проходе на отдыхе, не способных быстро встать и уйти от контакта с ползуном.
Задачей настоящего изобретения является снижение травматичности скребкового транспортера и повышение безопасности его работы в животноводческом помещении с животными за счет обеспечения адаптивного режима работы транспортера с автоматическим отключением ползуна от работающей штанги при наезде ползуна на препятствие (животное) в любой точке очищаемой поверхности по ширине захвата скребка, а также с автоматическим возобновлением движения ползуна после удаления препятствия.
Решение поставленной технической задачи достигается тем, что штанговый скребковый транспортер, включающий горизонтально установленную с возможностью возвратно-поступательного перемещения приводную штангу с рабочим и холостым ходом движения, на которой расположены зацепы, и взаимодействующий со штангой с возможностью прерывисто-поступательного перемещения вдоль нее ползун со скребком и захватом, шарнирно закрепленным над штангой с возможностью поворота в вертикальной плоскости и в рабочем положении взаимодействующим с зацепом, снабжен ограничителем рабочего хода ползуна в виде установленного на ползуне упора для контакта с препятствием, в исходном положении расположенного перед скребком по ходу перемещения ползуна, а в рабочем положении упруго взаимодействующего с захватом для его отключения от штанги на ее холостом ходу. Упор выполнен упруго деформируемым, подпружинен относительно ползуна и в рабочем положении своим задним участком опирается на нижнюю или верхнюю часть захвата относительно его оси поворота; у упора передний участок выполнен упруго деформируемым, а задний участок шарнирно связан с захватом.
Оснащение транспортера ограничителем рабочего хода ползуна обеспечивает возможность экстренной остановки ползуна при возникновении внешнего препятствия его перемещению (животное).
Выполнение ограничителя в виде размещенного перед скребком упора для контакта с препятствием обеспечивает передачу со стороны препятствия усилия захвату для отключения ползуна от штанги при отсутствии контакта скребка с препятствием, а также исключает возможность непосредственного силового контакта препятствия со скребком и вероятность поломки механизма закрепления скребка на ползуне, что обеспечивает безопасное применения транспортера при очистке поверхности в животноводческих помещениях в присутствии животных.
Установка упора с возможностью упругого взаимодействия с захватом обеспечивает под действием рабочей нагрузки на упор со стороны препятствия перевод захвата в нерабочее положение на холостом ходу штанги с отключение ползуна от штанги, что исключает силовой контакт скребка с препятствием.
Выполнение упора упруго деформируемым снижает усилие взаимодействия движущегося ползуна с препятствием за счет упругой деформации упора под нагрузкой и уменьшения его продольного вдоль штанги габарита, что исключает травмирование животного при контакте с упором. В этом случае также обеспечивается передача рабочего усилия со стороны упора захвату для перевода захвата в нерабочее положение и удерживания его в этом положении, что отключает ползун от работающей штанги с остановкой движения ползуна на время взаимодействия упора с препятствием.
Выполнение упора подпружиненным относительно ползуна в сторону его перемещения обеспечивает возврат упора в исходное положение при снятии нагрузки после устранения препятствия.
Выполнения упора с упруго деформируемым передним участком при шарнирном закреплении заднего участка на захвате обеспечивает возврат упора в исходное положение без использования для этого дополнительного подпружинивающего элемента, что при снижении кинематических связей упрощает конструкцию ограничителя.
Сущность предлагаемого технического решения поясняется графическими материалами,
где на фиг.1 представлен общий вид на транспортер в плане;
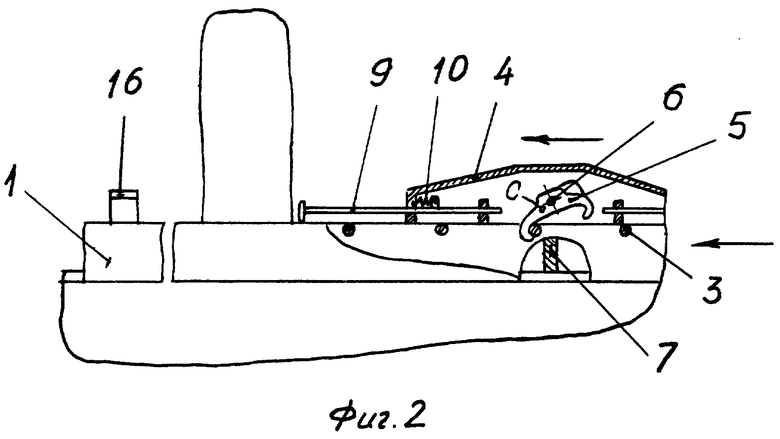
на фиг.2 - положение ползуна (первый пример исполнения упора) в начале рабочего хода штанги;
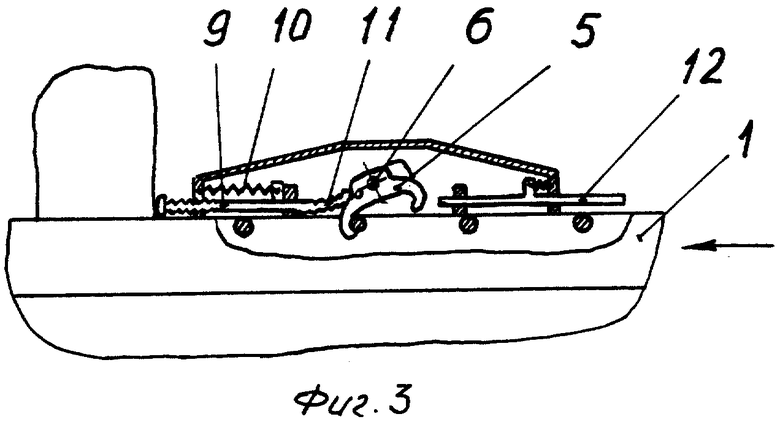
на фиг.3 - положение ползуна при контакте с препятствием в конце рабочего хода штанги;
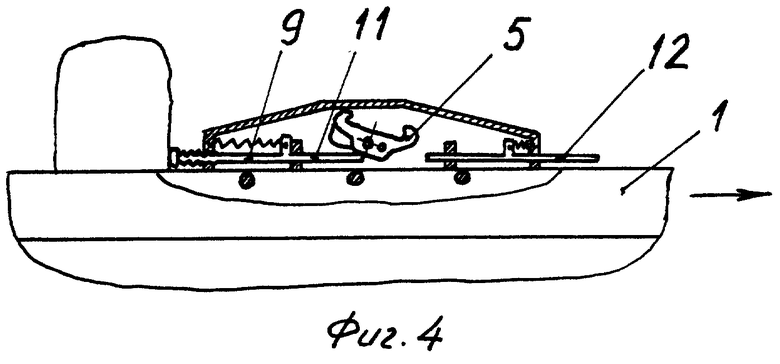
на фиг.4 - положение ползуна при контакте с препятствием в момент отключения захвата от штанги на ее холостом ходу;
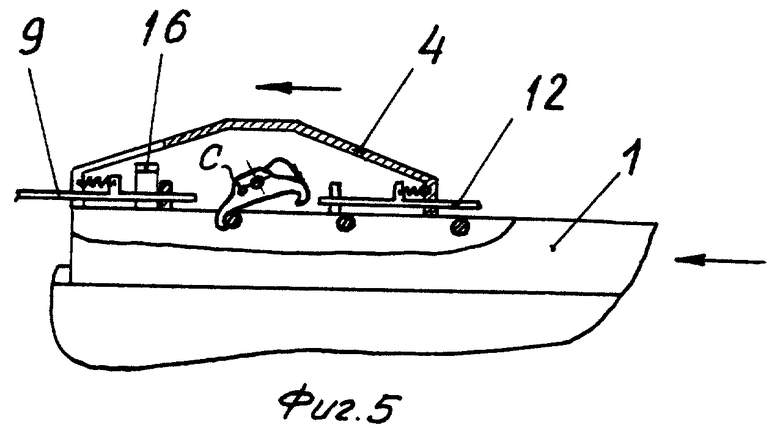
на фиг.5 - крайнее положение ползуна у конца штанги при рабочем ходе штанги;
на фиг.6 - то же положение ползуна после холостого хода штанги;
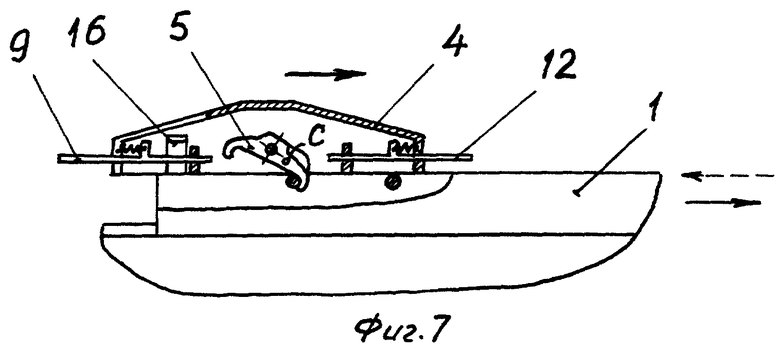
на фиг.7 - положение ползуна при первом рабочем ходе штанги в противоположную сторону после реверсирования хода ползуна;
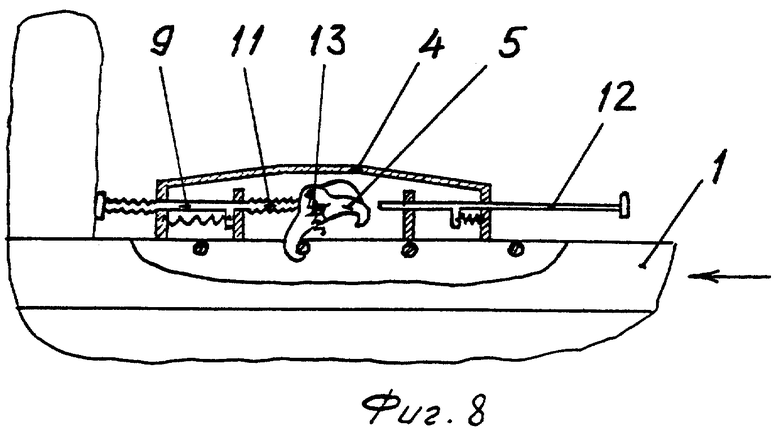
на фиг.8 - положение ползуна (второй пример исполнения упора) при контакте с препятствием в конце рабочего хода штанги;
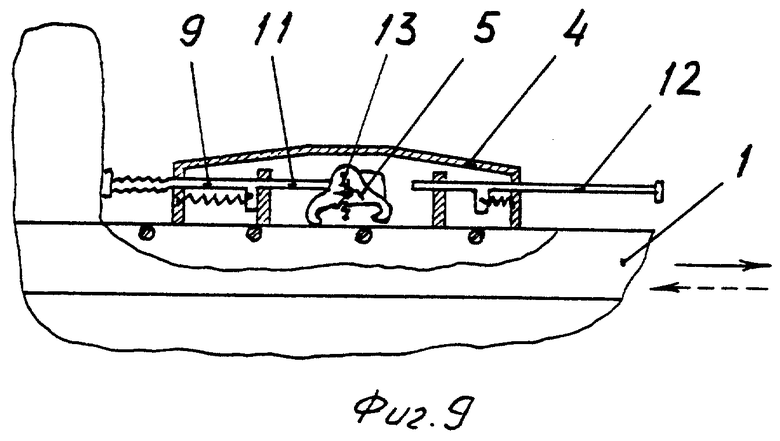
на фиг.9 - положение ползуна (второй пример исполнения упора) при нерабочем положении захвата в режиме отключения ползуна от штанги;
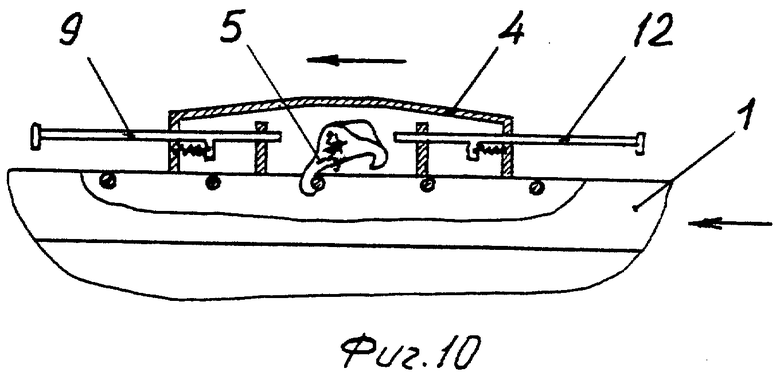
на рис.10 - положение ползуна (второй пример исполнения упора) при рабочем ходе штанги;
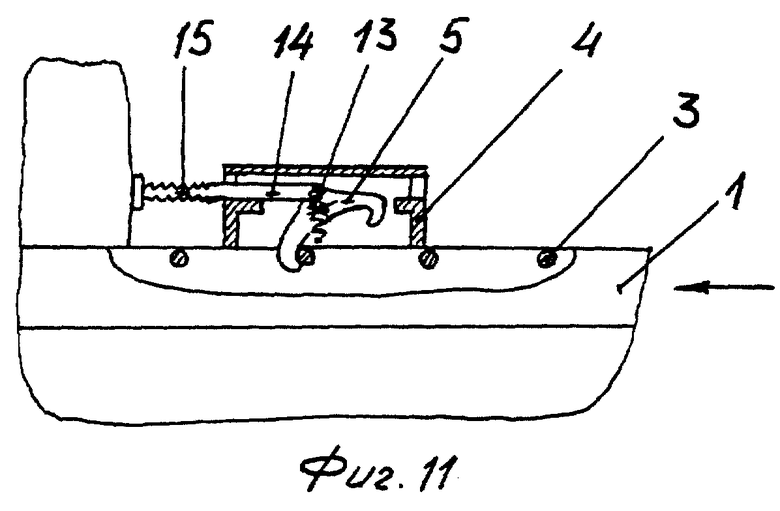
на фиг.11 - положение ползуна (третий пример исполнения упора) при контакте с препятствием в конце рабочего хода штанги;
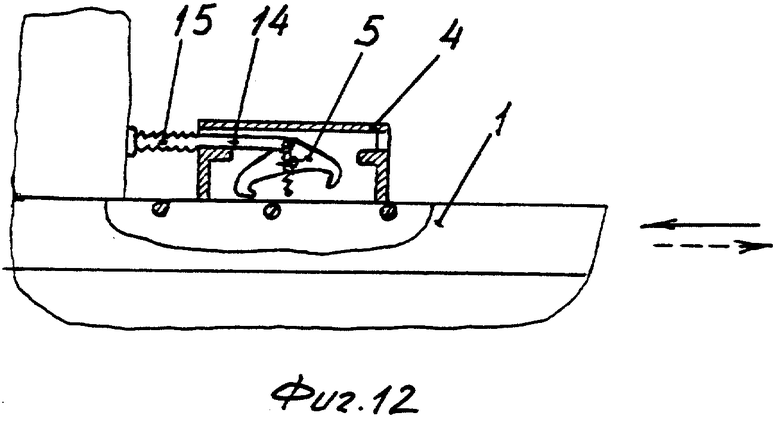
на фиг.12 - положение ползуна (третий пример исполнения упора) при нерабочем положении захвата в режиме отключения ползуна от штанги;
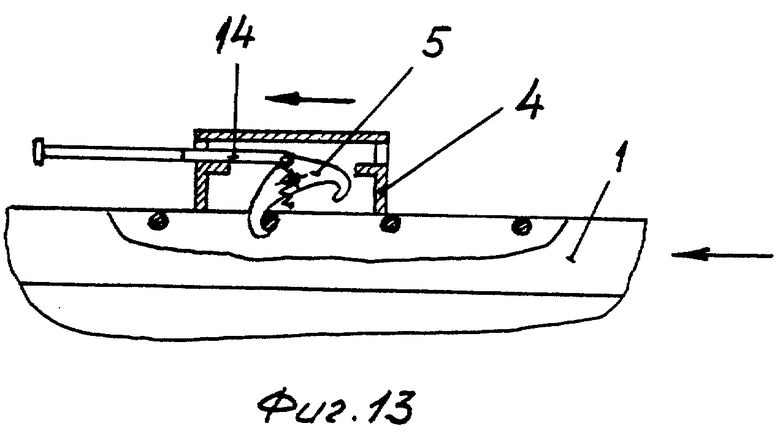
на фиг.13 - положение ползуна (третий пример исполнения упора) при рабочем ходе штанги.
Скребковый транспортер содержит штангу 1, установленную с возможностью возвратно-поступательного перемещения под действием привода 2 (например, кривошипно-шатунный механизм и т.п.), на рабочей поверхности которой размещены зацепы 3 (выступы, углубления или отверстия в штанге и т.п.), расположенные с равномерным шагом вдоль штанги 1.
На штанге 1 установлен ползун 4, поочередно взаимодействующий при ее рабочем ходе с зацепами 3 посредством, например, двуплечего крючкового захвата 5 периодического действия, в рабочем положении одним плечом взаимодействующего с зацепом 3 и шарнирно закрепленного на оси 6 над штангой 1 с возможностью поворота в вертикальной плоскости для периодического взаимодействия захвата 5 с зацепами 3 при рабочем перемещении ползуна 4 и изменения рабочего положения захвата 5 при реверсировании движения ползуна 4. Возврат захвата 5 в рабочее положение может обеспечиваться, например, расположением центра масс захвата (т.С) на рабочем плече захвата с переносом его на другое плечо при реверсировании хода ползуна 4 или с использованием двухпозиционной возвратной пружины.
Возможно также использование в качестве захвата упорных элементов, храпового колеса с регулируемой собачкой и других вариантов конструктивного выполнения одностороннего механического соединения захвата 5 с зацепом 3.
На ползуне 4 поперек штанги 1 закреплен скребок 7 для взаимодействия с очищаемой поверхностью. При очистке поверхности со смещением материала вначале в сторону прямого, а затем в сторону обратного хода штанги 1 (двусторонняя очистка поверхности в два выгрузных канала, расположенных по обе стороны от очищаемой поверхности) скребок 7 может быть жестко закреплен на ползуне 4.
При очистке поверхности со смещением материала в одну сторону - в сторону прямого хода штанги 1 (односторонняя очистка поверхности в один выгрузной канал, расположенный в конце очищаемой поверхности) скребок 7 может быть закреплен на ползуне 4 с возможностью поворота любым известным способом в вертикальной плоскости при обратном - нерабочем перемещении ползуна 4 для подъема скребка 7 над очищаемой поверхностью (шарнирное закрепление скребка с возможностью поворота скребка при трении о поверхность, использование кулачка для подъема скребка над очищаемой поверхностью и т.п.).
Транспортер также снабжен ограничителем хода ползуна 4 в виде в расположенного в исходном положении перед скребком 7 по ходу перемещения ползуна 4 упора 8 для контакта с препятствием, в рабочем положении под нагрузкой со стороны препятствия упруго взаимодействующего с захватом 5 для его перевода в нерабочее положение и отключения от штанги 1 на ее холостом ходу.
Упор 8 может быть выполнен в виде, например, П-образного гибкого стержня, козырька, пластины или другого подобного элемента, смещенного относительно скребка в сторону перемещения ползуна 4 и перекрывающего зону возможного контакта скребка 7 с препятствием.
В частном случае (первый пример исполнения ограничителя, фиг.2...7) упор 8 выполнен в виде козырька 9, размещенного над штангой 1 вдоль скребка 7, со смещением своего переднего участка относительно скребка 7 в сторону перемещения ползуна 4 (например, влево) и подпружиненного относительно ползуна 4 в эту же сторону с использованием, например, возвратной пружины растяжения 10. Козырек 9 выполнен упруго деформируемым так, что его задний участок 11 под нагрузкой подпружинен относительно его переднего участка в направлении холостого хода штанги 1, при этом в рабочем положении (под действием внешней нагрузки со стороны препятствия) козырек 9 своим задним участком 11 опирается на нижнюю часть захвата 5 (под осью 6) с возможностью перевода захвата 5 в нерабочее положение с поворотом в сторону холостого хода штанги 1 для отключения ползуна 4 от работающей штанги 1 на ее холостом ходу (фиг.3, 4).
Для экстренной остановки ползуна 4 при его перемещении в обратную сторону (вправо) после реверсирования его движения используется аналогичный ограничитель хода с таким же упором в виде козырька 12, направленного в сторону нового (реверсивного) перемещения ползуна 4.
Во втором примере конструктивного исполнения ограничителя (фиг.8-10) в рабочем положении козырька 9 его задний участок 11 опирается на верхнюю часть захвата 5 (над осью 6) для его перевода на холостом ходу штанги 1 в нерабочее положение с поворотом в сторону рабочего хода штанги 1.
Для возврата захвата 5 в рабочее положение в этом случае может быть использована двухпозиционная возвратная пружина 13, у которой при симметричном относительно вертикали нерабочем положении захвата 5 нижний конец закреплен под захватом 5 на ползуне 4, а верхний - на верхнем участке захвата 5, при этом оба конца заделки пружины 13 расположены на вертикальной оси симметрии захвата 5.
В третьем примере конструктивного исполнения (фиг.11-13) упор 8 выполнен в виде пластины 14 с упруго деформируемым передним участком 15 и задним участком, шарнирно связанным с захватом 5. Для выполнения этой же функции при реверсивном перемещении ползуна 4 в обратном направлении может быть использована аналогичная пластина с упруго деформируемым передним участком, направленным в новую сторону перемещения ползуна 4 после реверсирования его хода.
Для автоматического реверсирования перемещения ползуна 4 сбоку на концах штанги 1 могут быть закреплены переключатели 16 (кронштейны, штыри, наклонные площадки, гибкие элементы и др. упорные элементы), взаимодействующие с захватом 5 для его известного перевода в новое рабочее положение с поворотом на оси 6 в неподвижном положении ползуна 4 на холостом ходу штанги 1.
Скребковый транспортер работает следующим образом.
В исходном положении захват 5 своим рабочим плечом (например, левым плечом) взаимодействует с рабочей поверхностью штанги 1 и поддерживается в этом положении, например, за счет размещения на рабочем плече под осью 6 центра масс захвата 5 (т.С), или с использованием для этого соответствующего подпружинивания захвата 5 относительно ползуна 4, например, двухпозиционной возвратной пружиной 13.
Под действием привода 2 штанга 1 приводится в возвратно-поступательное движение вдоль очищаемой поверхности. В первой фазе при прямом рабочем ходе штанги 1 (согласно фиг.2, 10, 13 влево) зацеп 3 воздействует на рабочее плечо захвата 5 и этим увлекает в поступательное движение вместе со штангой 1 ползун 4 со скребком 7, сдвигающим материал (навоз, подстилка и т.п.) вдоль очищаемой поверхности в сторону рабочего перемещения ползуна 4 к выгрузному каналу (влево). Во второй фазе при обратном холостом ходе штанги 1 захват 5 выходит из контакта с зацепом 3, поворачиваясь под действием последующего зацепа 3 в вертикальной плоскости относительно оси 6 в сторону холостого хода штанги 1. К моменту окончания холостого хода штанги 1 захват 5 под действием силы тяжести (или возвратной пружины), перескакивая через рабочий зацеп 3, вновь своим рабочим концом располагается перед последующим зацепом 3, что при дальнейших рабочих перемещениях штанги 1 обеспечивает рабочее прерывистое перемещение в ту же сторону ползуна 4 со скребком 7 относительно штанги 1 вдоль очищаемой поверхности.
При возникновении препятствия (животное) на пути ползуна 4 (например, слева) при рабочем ходе штанги 1 (влево) упор 8 под давлением препятствия оказывает упругое воздействие на захват 5 в направлении холостого хода штанги 1.
В первом примере исполнения ограничителя для этого козырек 9 своим передним участком нажимает на препятствие, при этом упруго деформируемый козырек 9, деформируя подпружинивающий элемент 10, смещается относительно ползуна 4 в сторону, обратную рабочему перемещению штанги 1, в результате чего задний участок 11 упирается в нижнюю часть рабочего плеча захвата 5 относительно оси поворота захвата 5 и, деформируясь, подпружинивает захват 5 в направлении холостого хода штанги 1.
При последующем холостом ходе штанги 1 участок 11 под действием силы упругости смещается вдоль штанги 1 в сторону ее холостого хода при одновременном холостом повороте в ту же сторону захвата 5 с его переводом в нерабочее положение, в результате чего создается механическое препятствие для опускания захвата 5 в рабочее положение и ввода в контакт с зацепом 3 рабочего плеча захвата 5. При последующей работе штанги 1 захват 5 удерживается в нерабочем положении участком 11 с отключением ползуна 4 от штанги в течение всего времени контакта козырька 9 с препятствием.
После удаления препятствия под действием элемента 10 козырек 9 смещается в исходное положение, при котором участок 11 выходит из рабочей зоны захвата 5, благодаря чему захват 5 под действием, например, силы тяжести вновь опускается в рабочее положение взаимодействия его того же рабочего плеча с зацепом 3, что возобновляет перемещение ползуна 4 под действием штанги 1 в том же направлении его рабочего хода.
После последнего прямого рабочего хода штанги 1 с перемещением ползуна 4 (влево) под действием расположенного на штанге 1 переключателя 16 на холостом ходу штанги 1 захват 5 поворачивается в вертикальной плоскости и после опрокидывания приходит во взаимодействие с рабочей поверхностью штанги 1 своим новым (правым) плечом с удерживанием в этом новом исходном положении описанным выше способом (переносом центра масс на новое рабочее плечо захвата 5, переводом пружины 13 в новое рабочее положение и т.п.). Это новое положение захвата 5 является исходным для последующего реверсивного перемещения вдоль штанги 1 ползуна 4 в противоположном направлении.
При дальнейшей работе штанги 1 и взаимодействии зацепа 3 с правым плечом захвата 5 ползун совершает прерывистое движение в противоположном направлении (вправо) при контакте с очищаемой поверхностью жестко закрепленного скребка 7 в случае двусторонней очистки поверхности, либо в случае односторонней очистки поверхности - при подъеме поворотного скребка 7 над очищаемой поверхностью любым известным способом (например, за счет подвижного соединения скребка 7 с держателем при использовании связанного со скребком кулачка, контактирующего с очищаемой поверхностью и т.п).
При обратном после автореверсирования движении ползуна 4 (вправо) работу по отключению захвата 5 от штанги 1 в случае возникновения препятствия справа выполняет аналогичным описанному способом козырек 12, направленный в сторону нового "реверсивного" перемещения ползуна 4.
По достижении противоположного конца штанги 1 последующее автореверсирование хода ползуна 4 осуществляется способом, аналогичным описанному выше.
Во втором примере конструктивного исполнения ограничителя (фиг.8, 9) в случае возникновения препятствия (животное) на пути ползуна 4 слева на рабочем ходу штанги 1 (влево) у козырька 9 его передний участок под действием препятствия деформируется, что вызывает смещение козырька 9 в сторону захвата 5 и упругое воздействие деформируемого заднего участка 11 на верхнюю часть захвата 5 в направлении холостого хода штанги 1. При последующем холостом ходе штанги 1 (вправо) захват 5 под действием силы упругости сдеформированного козырька 9 выходит из зацепления с зацепом 3 и с поворотом в вертикальной плоскости в сторону рабочего хода штанги 1 переводится в нерабочее положение и удерживается в этом положении участком 11 с остановкой ползуна 4 при работающей штанге 1 в течение всего времени взаимодействия козырька 9 с препятствием.
После устранения препятствия и перехода козырька 9 в исходное положение захват 5 возвращается в рабочее положение под действием пружины 13 и при взаимодействии с зацепом 3 вновь обеспечивает перемещение ползуна 4 в том же направлении. Автореверсирование хода ползуна 4 у левого конца штанги 1 в этом случае производится путем опрокидывания захвата 5 с изменением его положения в обратную сторону под действием переключателя 16 и переводом двухпозиционной пружины 13 в свое второе рабочее положение, при котором обеспечивает периодический контакт с зацепами 3 правого рабочего плеча захвата 5. При дальнейшем движении ползуна 4 в обратном направлении (вправо), в случае возникновения препятствия справа от ползуна 4, функцию отключения захвата 5 от штанги 1 выполняет упруго деформируемый козырек 12.
В третьем примере исполнения ограничителя (фиг.11) при встрече ползуна 4 с препятствием (слева) в результате упругой деформации переднего участка 15 пластины 14 ее задний участок воздействует на верхнюю часть захвата 5, что на холостом ходу штанги 1 (вправо) обеспечивает поворот захвата 5 в сторону рабочего хода штанги 1 с переводом захвата 5 в нерабочее положение и удерживания его в нем при работающей штанге 1 с остановкой ползуна 4 (фиг.12). После устранения препятствия и соответственно давления на захват 5 пластины 14 захват 5 вновь опускается в рабочее положение под действием пружины 13 с переходом пластины 14 в исходное положение. Реверсирование хода ползуна 4 в этом варианте и его взаимодействие с препятствием при обратном движении (вправо) производится описанным выше способом с использованием переключателя 16 и аналогичной дополнительной пластины 14 с передним участком, обращенным в сторону реверсивного перемещения ползуна 4.
Предлагаемый скребковый транспортер реализует технологию очистки поверхности механическим устройством с адаптивным режимом работы, при котором обеспечивается остановка ползуна с отключением от штанги захвата под действием возникшего препятствия с последующим возобновлением рабочего процесса после устранения препятствия, что исключает всякую возможность травмирования животного при его возможном контакте с ползуном и поломку механизма жесткого закрепления на нем скребка.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ СКРЕБКОВЫЙ ТРАНСПОРТЕР | 2006 |
|
RU2310323C1 |
| СПОСОБ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛОВ И ИЗМЕЛЬЧИТЕЛЬ | 2005 |
|
RU2311750C2 |
| СПОСОБ РАЗРЕЗКИ РУЛОНА СТЕБЕЛЬЧАТОГО МАТЕРИАЛА И РАЗРЕЗЧИК РУЛОНА | 2005 |
|
RU2311749C2 |
| Устройство для удаления навоза | 1975 |
|
SU648177A1 |
| Устройство для уборки навоза | 1982 |
|
SU1102533A1 |
| РОТОР ИЗМЕЛЬЧИТЕЛЯ МАТЕРИАЛОВ | 2005 |
|
RU2296010C1 |
| Шаговый конвейер | 1985 |
|
SU1305084A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ УСТРОЙСТВА ДЛЯ УБОРКИ НАВОЗА В ЖИВОТНОВОДЧЕСКИХ ПОМЕЩЕНИЯХ | 2009 |
|
RU2402201C1 |
| Устройство для удаления навоза | 1980 |
|
SU871776A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ КОРМОСМЕСИ В БУНКЕРНОМ СМЕСИТЕЛЕ И СМЕСИТЕЛЬ КОРМОВ | 2005 |
|
RU2311753C2 |

Транспортер содержит горизонтально установленную с возможностью возвратно-поступательного перемещения приводную штангу с рабочим и холостым ходом движения, на которой расположены зацепы, и взаимодействующий со штангой с возможностью прерывисто-поступательного перемещения вдоль нее ползун со скребком и захватом, шарнирно закрепленным над штангой с возможностью поворота в вертикальной плоскости и в рабочем положении взаимодействующий с зацепом. Транспортер снабжен ограничителем рабочего хода ползуна в виде установленного на ползуне упора для контакта с препятствием, в исходном положении расположенного перед скребком по ходу перемещения ползуна, а в рабочем положении упруго взаимодействующий с захватом для его отключения от штанги на ее холостом ходу. Снижается ревматизм животных и повышается безопасность работы в животноводческом помещении. 2 з.п. ф-лы, 13 ил.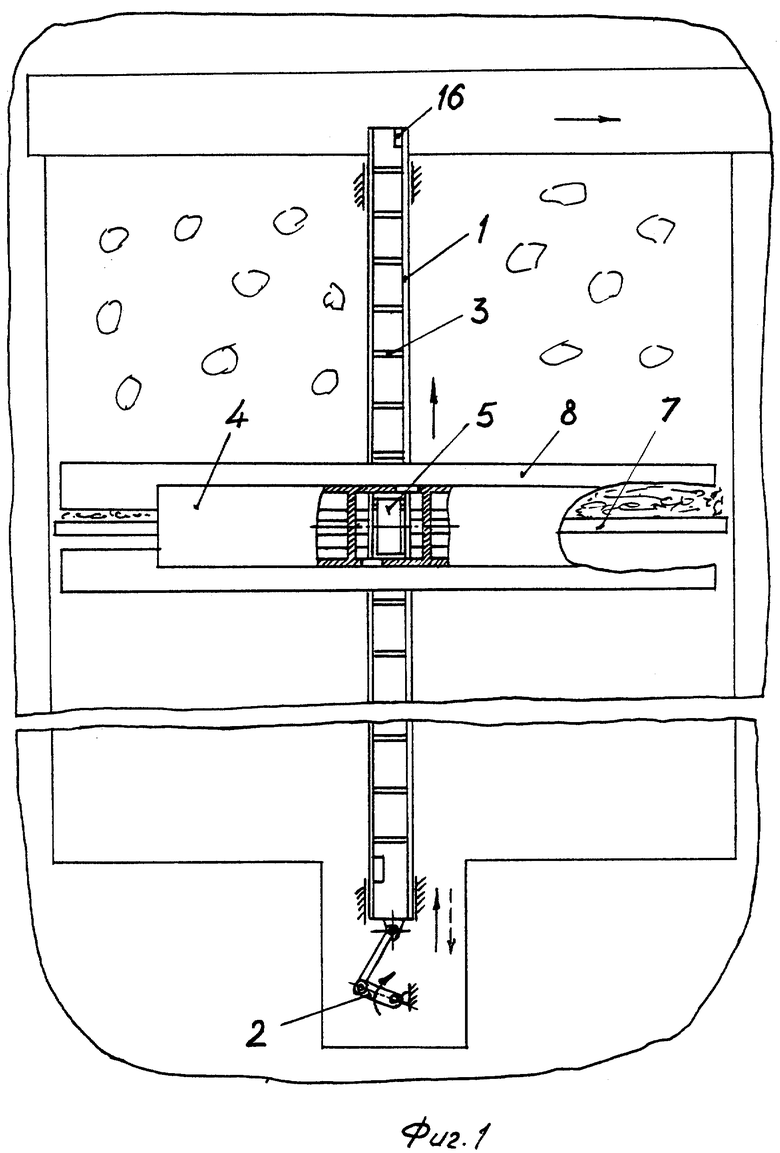
| Устройство Е.Л.Сосновского для очистки стойл | 1985 |
|
SU1373375A1 |
| Устройство для уборки навоза из животноводческих помещений | 1976 |
|
SU634716A1 |
| Устройство для удаления навоза | 1981 |
|
SU1076040A1 |
| Устройство для уборки навоза изжиВОТНОВОдчЕСКиХ пОМЕщЕНий | 1979 |
|
SU841623A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ ЭНДОПРОТЕЗИРОВАНИЯ ТАЗОБЕДРЕННОГО СУСТАВА | 1997 |
|
RU2128341C1 |

