кающая собачка в виде двуплечего рычага с рабочим и нерабочим плечами (П). На раме размещен механизм опускания рычага в нерабочее положение при обратном ходе iHTOKa цилиндра 11. Он выполнен в виде двух параллельно расположенных подвижных подпружиненных к раме штанг с роликом (Р) на конце каждой штанги. Один Р установлен для взаимодействия с рабочим П рычага, а другой Р - с нерабочим П. Ход Р для рабочего П меньше хода Р для нерабочего П. Направляющие имеют соединенные
Изобретение относится к прокатному оборудованию, а именно к устройствам для транспортировки проката, и может быть использовано в уборочной группе оборудования щирокополосных станов.
Целью изобретения является повышение надежности работы и улучшение условий обслуживания конвейера.
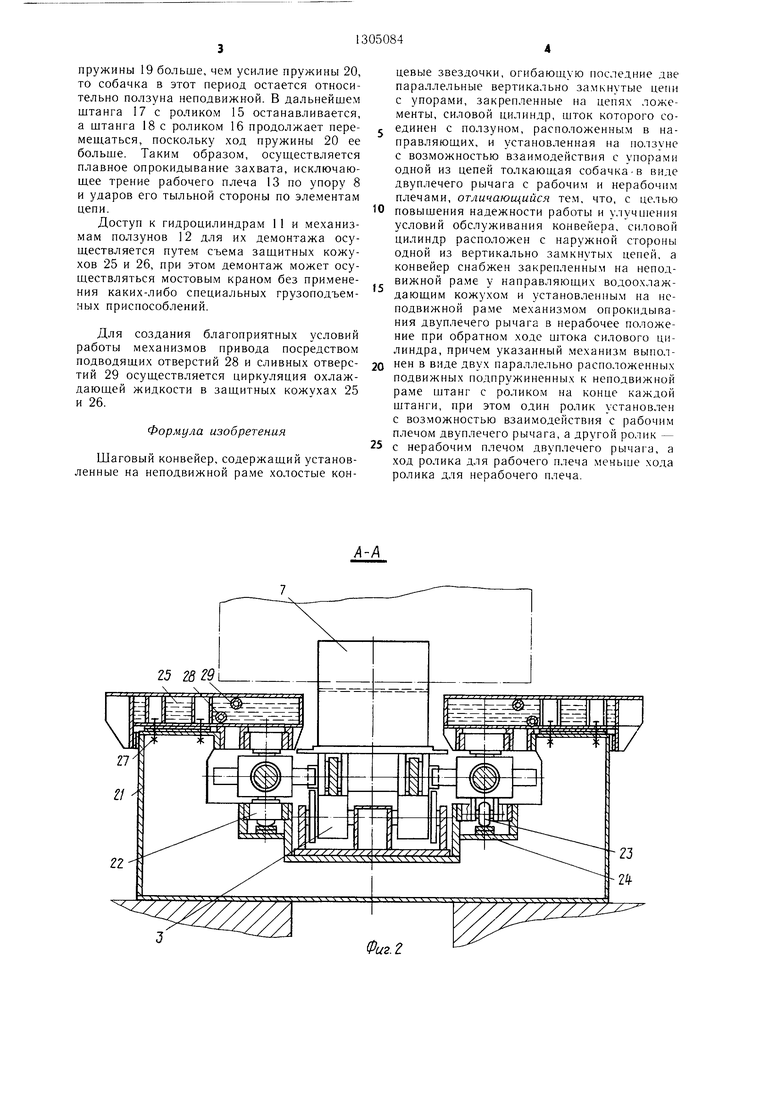
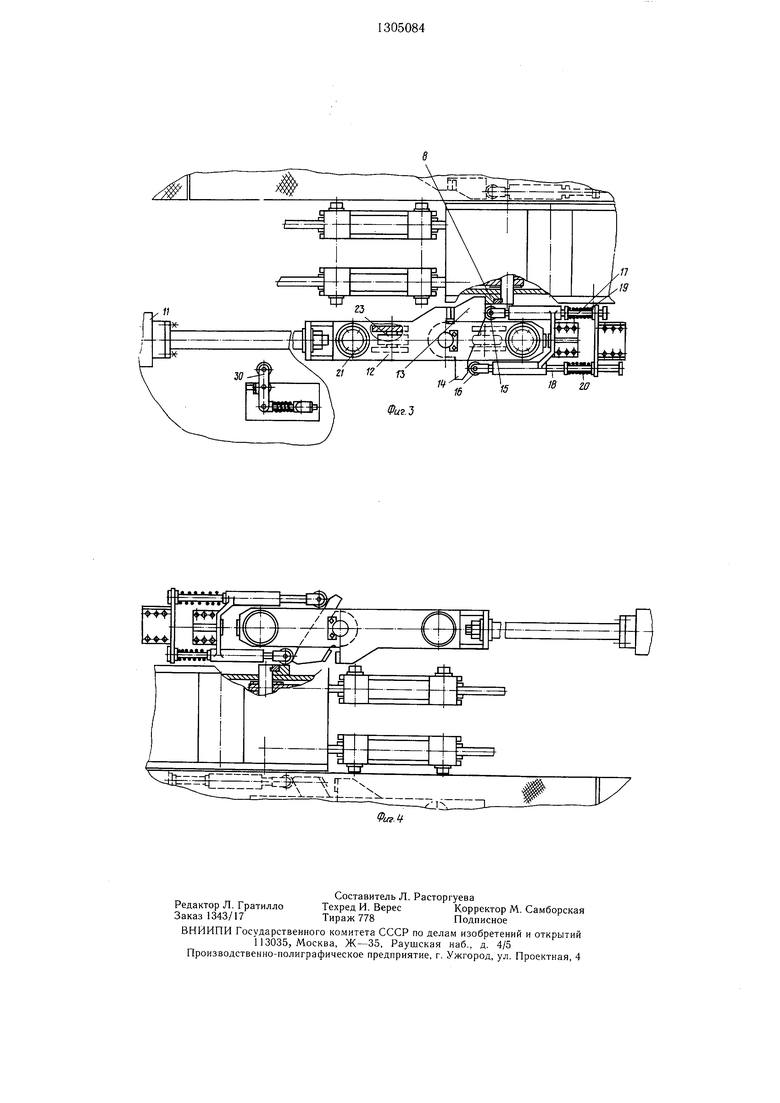
На фиг. 1 дано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - привод перемещения устройства (положение механизмов в конце рабочего хода), вид сверху; на фиг. 4 - то же, положение механизмов в начале холостого хода, вид сверху.
Шаговый конвейер состоит из балок 1 и 2, неподвижной рамы, на них установлены ролики 3 и 4, на которые опираются верхние рабочие 5 и нижние холостые б ветви двух параллельных вертикально замкнутых цепей устройства, включающие закрепленные на них ложементы 7 с упорами 8, при этом ложементы цепей расположены с щагом, кратным щагу конвейера. Бесконечная цепь огибает холостые концевые звездочки 9 и 10, установленные на неподвижной раме. Тол- кательный гидравлический привод конвейера состоит из силовых цилиндров - гидроцилиндров 11, щтоки которых соединены с ползунами 12, на которых шарнирно закреплены толкающие собачки в виде двуплечих рычагов с рабочим 13 и нерабочим 14 плечами, взаимодействующими с роликами 15 и 16, установленными на щтангах 17 и 18, подпружиненных пружинами 19 и 20. Ползуны 12 оснащены двумя парами вертикальных роликов 21 и 22 и парой горизонтальных роликов 23 и перемещаются в С-образных закрытых направляющих, нижние из которых расположены на неподвижной раме 24, а верхняя часть выполнена за одно целое с легкосъемными водоохлаждаемыми защитными кожухами 25 и 26, соединенными с рамой 24 посредством крепежных элементов 27. Защитные кожухи имеют подводящие 28 и сливные 29 отверстия. Для возврата
с рамой легкосъемные водоохлаждающие кожухи с подводящими и сливными отверстиями. Рулоны, уложенные в ложементы 7 цепи 5, перемещаются в щаговом режиме. В конце рабочего хода ползунов захваты сначала нерабочим П, а затем рабочим П входят в контакт с Р штанг. Одна штанга с Р останавливается, а другая продолжает перемещаться. В результате осуществляется плавное опрокидывание захвата, исключающее трение рабочего П по упору и удары его по цепи. 4 ил.
захватов в исходное положение на основании 24 установлены отклоняющие подпружиненные ролики 30. Гидроцилиндры 11 расположены с наружной стороны вертикально замкнутых цепей.
Механизм опускания двуплечего рычага в нерабочее положение при обратном ходе штока гидроцилиндра 11 выполнен в виде параллельно расположенных подвижных
подпружиненных к неподвижной раме штанг 17 и 18с роликом 15 или 16 на конце соответствующей штанги 17 или 18, при этом один ролик 15 установлен с возможностью взаимодействия с рабочим плечом 13 двуплечего рычага, а другой ролик 16 - с не5 рабочим плечом 14 двуплечего рычага, а ход ролика 15 для рабочего плеча 13 меньше хода ролика 16 для нерабочего плеча 14. Устройство работает следующим образом. Рулоны, уложенные в ложементы 7 рабочей ветви цепи 5, перемещаются в щаговом
0 режиме с шагом, кратным расстоянию между ложементами - гидроцилиндрами 11, посредством ползунов 12, расположенных симметрично по обе стороны цепи. При рабочем ходе захваты рабочим плечом 13 входят
5 в зацепление с упорами 8, установленными на ложементах 7, при этом нагрузки, возникающие от опрокидывающего момента в результате эксцентрично приложенного толкающего усилия на цепь отдельно каждого из гидроприводов, воспринимаются по0 средством вертикальных роликов 21 и 22 ползуна 12, закрытыми С-образными направляющими основания 24 и защитного кожуха 25. В конце рабочего хода ползунов 12 захваты сначала нерабочим плечом 14, а затем и рабочим плечом 13 входят в контакт
5 с роликами 16 и 15 штанг 18 и 17, сжимая при этом пружины 20 и 19.
При возврате ползунов 12 с толкающими собачками в исходное положение в начале хода пружины 19 и 20, разжимаясь, поддерживают контакт роликов 15 и 16 с илеча- ми 13 и 14 рычага, причем поскольку усилие
пружины 19 больше, чем усилие пружины 20, то собачка в этот период остается относительно ползуна неподвижной. В дальнейшем штанга 17 с роликом 15 останавливается, а штанга 18 с роликом 16 продолжает перемещаться, поскольку ход пружины 20 ее больше. Таким образом, осуш,ествляется плавное опрокидывание захвата, исключаю- ш,ее трение рабочего плеча 13 по упору 8 и ударов его тыльной стороны по элементам цепи.
Доступ к гидроцилиндрам 1 1 и механизмам ползунов 12 для их демонтажа осу- ш.ествляется путем съема зашитных кожухов 25 и 26, при этом демонтаж может осу- идествляться мостовым краном без применения каких-либо специальных грузоподъемных приспособлений.
Для создания благоприятных условий работы механизмов привода посредством подводящих отверстий 28 и сливных отверстий 29 осуществляется циркуляция охлаждающей жидкости в защитных кожухах 25 и 26.
Формула изобретения
Шаговый конвейер, содержащий установленные на неподвижной раме холостые концевые звездочки, огибающую последние две параллельные вертикально замкнутые цепи с упорами, закрепленные на цепях ложементы, силовой цилиндр, шток которого со- единен с ползуном, расположенным в направляющих, и установленная на ползуне с возможностью взаимодействия с упорами одной из цепей толкающая собачка-в виде двуплечего рычага с рабочим и нерабочим плечами, отличающийся тем, что, с целью
повышения надежности работы и улучшения условий обслуживания конвейера, силовой цилиндр расположен с наружной стороны одной из вертикально замкнутых цепей, а конвейер снабжен закрепленным на неподвижной раме у направляющих водоохлаж- дающим кожухом и установленны.м на неподвижной раме механиз.мом опрокидывания двуплечего рычага в нерабочее по, юже- ние при обратном ходе штока силового цилиндра, причем указанный .механизм выполнен в виде двух параллельно распо.юженных подвижных подпружиненных к неподвижной раме штанг с роликом на конце каждой штанги, при этом один ролик установлен с возможностью взаимодействия с рабочим плечом двуплечего рычага, а другой ролик -
с нерабочим плечом двуплечего рычага, а ход ролика для рабочего плеча меньше хода ролика для нерабочего плеча.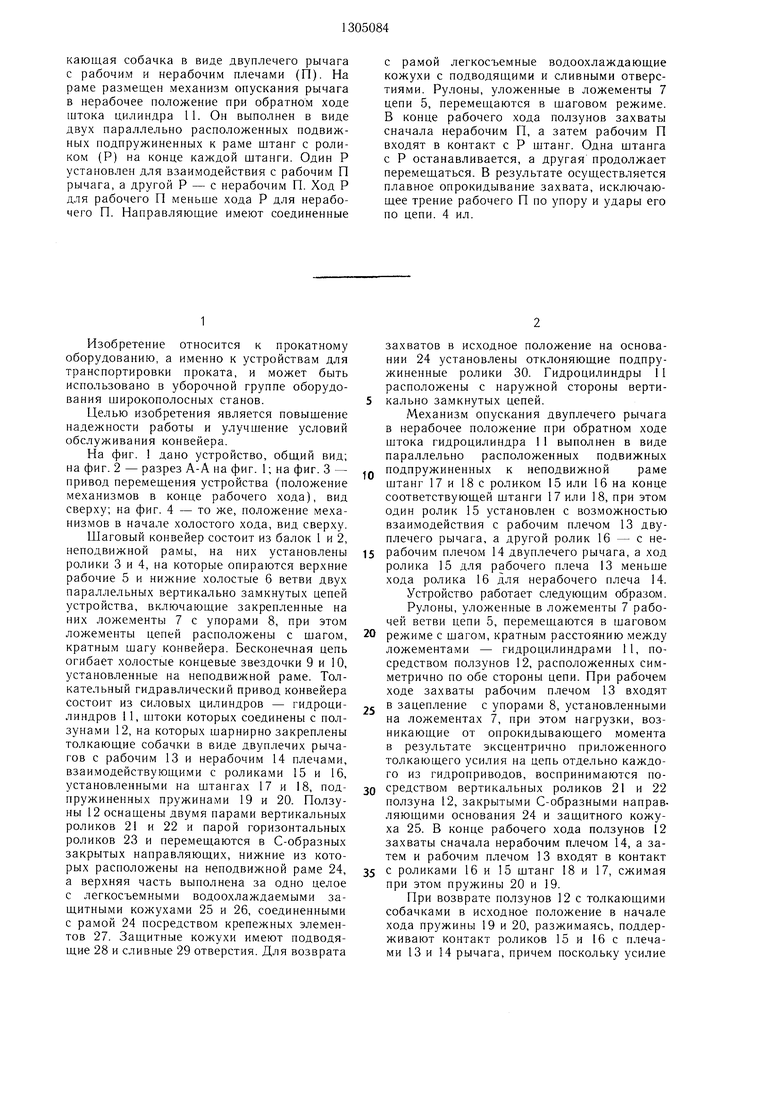
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Привод шагового конвейера | 1987 |
|
SU1523480A1 |
| Шаговый конвейер | 1988 |
|
SU1630997A1 |
| Устройство для кантования обрабатываемых деталей на конвейере | 1987 |
|
SU1537623A1 |
| Шаговый конвейер | 1980 |
|
SU908690A1 |
| Грузоведущий конвейер | 1990 |
|
SU1792895A1 |
| Шаговый конвейер | 1988 |
|
SU1521682A1 |
| Штанговый конвейер | 1978 |
|
SU776959A1 |
| Карусельный конвейер | 1986 |
|
SU1406089A1 |
Изобретение относится к прокатному оборудованию и предназначено для транспортировки проката широкополосных станов. Цель - повышение надежности работь и улучшение условий обслуживания конвейера. На неподвижной раме установлены холостые концевые звездочки 9 и 10, которые огибают ветви двух параллельных вертикально замкнутых цепей 5 и 6 с упорами и ложементами 7. С наружной стороны цепей расположен силовой цилиндр II, шток которого соединен с ползуном, расположенным в на- правляюших. На ползуне установлена толсл со о ел о 00 4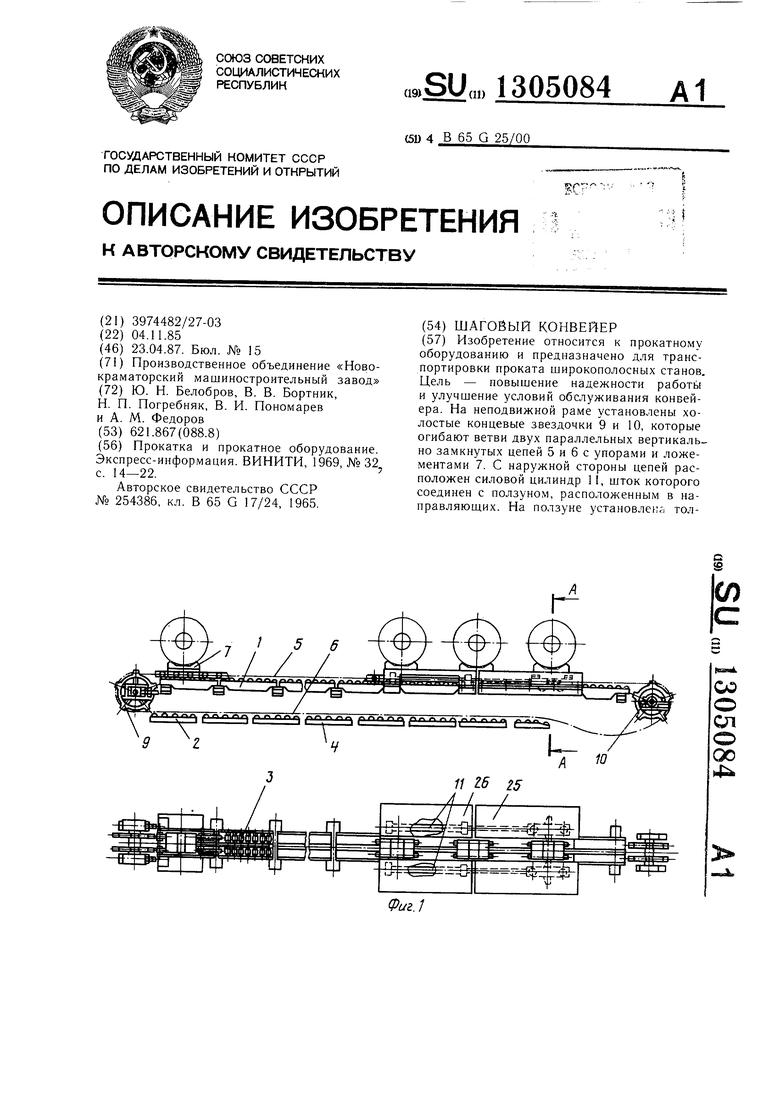
Фиг. 2
| Прокатка и прокатное оборудование | |||
| Экспресс-информация | |||
| ВИНИТИ, 1969, № 32 с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| 0 |
|
SU254386A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
