Изобретение относится к технологиям регулирования авиационных газотурбинных двигателей (ГТД), в частности к способам регулирования сопла с управляемым вектором тяги. Такие сопла, как правило, оснащены приводным кольцом, управляющим сверхзвуковыми створками сопла, и гидроприводами управления со штоками, присоединенными к приводному кольцу, а также гидроприводами управления критическим сечением сопла.
Наиболее близким к заявленному является способ регулирования сопла с управляемым вектором тяги авиационного газотурбинного двигателя, включающий измерение диаметра критического сечения сопла и изменение положения штоков гидроприводов кольца, управляющего сверхзвуковыми створками, пропорционально сигналам тангажа, рыскания и диаметра критического сечения сопла при наличии сигнала управления вектором тяги («Демонстрационное сопло с изменяемым вектором тяги фирмы ITP». ЦИАМ, Экспресс-информация по материалам иностранной печати, серия: Авиационное двигателестроение, №44, октябрь 1999 г., с.1-8).
Недостаток данного способа заключается в том, что при выполнении обычного полета с осесимметричным положением сопла диаметр среза сверхзвуковых створок не регулируется и, как следствие этого, в результате недорасширения газа в сопле, потери в сопле растут, что приводит к потерям тяги на сверхзвуковых режимах до 8...14%.
Технический результат - повышение тяговых характеристик двигателя на сверхзвуковых режимах с осесимметричным положением сверхзвуковых створок сопла путем оптимизации процесса управления этими створками.
Указанный результат достигается тем, что в способе регулирования сопла с управляемым вектором тяги авиационного газотурбинного двигателя, включающем измерение параметра, характеризующего площадь критического сечения сопла, определение ее величины, изменение положения штоков гидроприводов управления сверхзвуковыми створками, при наличии сигнала управления вектором тяги, в соответствии с площадью критического сечения сопла, а также сигналами задания углов тангажа и рыскания летательного аппарата, при отсутствии сигнала управления вектором тяги, дополнительно измеряют давление газа за турбиной, давление, характеризующее давление на срезе сверхзвуковых створок, по дополнительно измеренным параметрам и площади критического сечения сопла определяют потребную площадь выходного сечения сопла, а положение штоков гидроприводов изменяют в соответствии с предварительно определенной зависимостью площади выходного сечения сопла от положения штока гидропривода при фиксированных значениях площади критического сечения сопла.
Указанный результат достигается также тем, что при определении площади критического сечения сопла в качестве параметров, характеризующих ее величину, принимают угол отклонения рычага управления двигателем и температуру воздуха на входе в двигатель. При этом достигается дополнительное повышение тяговых характеристик двигателя.
На чертеже представлена структурная схема системы регулирования сопла с управляемым вектором тяги авиационного газотурбинного двигателя.
Система регулирования содержит регулятор 1 вектора тяги (например, электронный регулятор), снабженный группой 2 входов сигналов бортовых систем, таких как «Маневр» для идентификации режима, «тангаж (α)» и «рыскание (β)», группой 3 входов сигналов САУ двигателя, необходимых для идентификации режима двигателя, датчик 4 давления газа за турбиной, датчик 5 давления, характеризующего давление на срезе сопла и датчик 6 параметра, характеризующего площадь критического сечения сопла.
Датчик 6 параметра, характеризующего площадь критического сечения сопла, в частном случае, выполняют в виде датчика диаметра критического сечения сопла (ДКР).
Датчик 5 давления, характеризующего давление воздуха на срезе сверхзвуковых створок сопла, измеряет давление воздуха в точке, конструктивно наиболее близкой к плоскости среза сопла, поскольку размещение приемника давления непосредственно на срезе сопла попросту невозможно, т.к. в режиме управления вектором тяги, да и в режиме с осесимметричным положением створок сопла, выходные кромки сверхзвуковых створок совершают достаточно большие, несколько десятков сантиметров, перемещения. Датчик 5 может быть закреплен на любом конструктивном элементе, остающимся неподвижным относительно корпуса двигателя при указанном перемещении кромок сверхзвуковых створок сопла. В качестве точки отбора давления этим датчиком выбирается такая точка вне проточной части двигателя, для давления в которой может быть установлена корреляционная зависимость от давления окружающей среды на срезе сверхзвуковых створок.
В состав гидромеханической части системы входят плунжерный насос 7, связанный магистралью 14, по меньшей мере с тремя агрегатами 8, 9 и 10 управления гидроприводами 15, 16 и 17 кольца, управляющего сверхзвуковыми створками сопла (кольцо и створки сопла на чертеже не показаны). Каждый из агрегатов 8, 9 и 10 управления включает в себя, соответственно, исполнительный механизм 11, 12 и 13 управления подачей рабочей жидкости (топлива) высокого давления в полости гидроцилиндров гидроприводов 15, 16 и 17 (непосредственно гидроцилиндры на чертеже не показаны). Исполнительные механизмы 11, 12 и 13 подключены к соответствующим управляющим выходам регулятора 1. Каждый из гидроприводов 15, 16 и 17 содержит, соответственно, датчик 18, 19 и 20 положения штоков гидроцилиндров гидроприводов 15, 16 и 17. Датчики 18, 19 и 20 подключены к информационным входам регулятора 1.
Заявленный способ регулирования сопла с управляемым вектором тяги авиационного газотурбинного двигателя осуществляется следующим образом.
Для реализации данного способа предварительно выполняются следующие работы.
В соответствии с конкретной конструкцией сопла рассчитывают или определяют по графической 3D-модели величины углов ϕ и ψ поворота приводного кольца, управляющего сверхзвуковыми створками, соответствующие заданным углам тангажа α и рысканья β. Указанные величины углов определяют для минимального FКР MIN и максимального FKP MAX значений площади критического сечения сопла. В результате получают два значения коэффициента к приведения углов α и β к углам ϕ и ψ поворота приводного кольца, управляющего сверхзвуковыми створками сопла. Линейная аппроксимация по двум полученным точкам позволяет получить зависимость вида:
где а и b - коэффициенты аппроксимации.
Наряду с этим для граничных значений углов α и β в диапазоне их изменения определяют соответствующие величины выдвижения каждого из штоков гидроцилиндров - Li. Линейная аппроксимация позволяет получить зависимость вида

где с и d - коэффициенты аппроксимации.
В то же время для данной конструкции сопла определяется возможный диапазон величины согласованного (для обеспечения осесимметричного положения сверхзвуковых створок сопла) выдвижения штоков гидроприводов, обеспечивающий при конкретном текущем значении площади критического сечения сопла требуемый диапазон изменения площади выходного сечения сопла. В результате данной работы формируется двухмерная таблица, по которой при текущей величине площади критического сечения сопла и рассчитанной для данных условий потребной величине площади выходного сечения сопла однозначно определяется требуемая величина выдвижения штоков гидроприводов. Иначе говоря, указанная таблица содержит в себе зависимость площади выходного сечения сопла от положения штока гидропривода при фиксированных значениях площади критического сечения сопла.
В процессе регулирования сопла на регулятор 1 вектора тяги поступают (по группе 2 входов) сигналы бортовых систем летательного аппарата: сигнал «тангаж (α)» задания угла тангажа α, сигнал «рыскание (β)» задания угла рыскания β, а также сигнал управления вектором тяги «Маневр» в режимах работы с управлением вектором тяги. По группе 3 входов поступают один или несколько сигналов САУ двигателя, необходимых для идентификации режима его работы, например, дискретный сигнал достижения частотой вращения ротора двигателя заданной величины.
Регулятор 1 осуществляет контроль наличия сигнала управления вектором тяги. При наличии этого сигнала (т.е. при наличии команды «Маневр») для заданных углов тангажа α и рыскания β при текущем значении площади критического сечения сопла, определяемой, в частном случае, на основании измерений датчиком 6 диаметра критического сечения сопла, в соответствии с ранее определенными зависимостями, в регуляторе 1 рассчитывается потребная величина выдвижения каждого из штоков гидроприводов. Имея информацию о текущем положении каждого из штоков гидроприводов с датчиков 18, 19 и 20 регулятор 1 формирует управляющие сигналы на исполнительные механизмы 11, 12 и 13 агрегатов управления 8, 9, и 10, пропорциональные отклонению текущего положения штоков гидроприводов 15, 16 и 17 от расчетной величины. Исполнительные механизмы распределяют по полостям цилиндров гидроприводов 15, 16 и 17 рабочую жидкость (например, топливо), поступающую от плунжерного насоса 7 по магистрали 14, и система регулирования отрабатывает рассогласование.
При снятии команды «Маневр» регулятор 1 фиксирует отсутствие сигнала управления вектором тяги и обеспечивает управление диаметром среза сопла, т.е. площадью выходного сечения, при осесимметричном положении сверхзвуковых створок сопла. В этом режиме дополнительно измеряют давление газа за турбиной (РТ) (с помощью штатного датчика 4, установленного на двигателе) и давление, характеризующее давление окружающей среды (воздуха) на срезе сверхзвуковых створок сопла (РСР) (с помощью датчика 5). В соответствии с текущими величинами измеренных давлений газа за турбиной (РТ) и на срезе сопла (РСР), а также площади (FКР) критического сечения сопла, определяемой по результатам измерения диаметра критического сечения сопла (ДКР) датчиком 6, регулятор 1 рассчитывает потребную площадь выходного сечения сопла FВЫХ:
где m и n - коэффициенты аппроксимации, полученные при обработке рассчитанных высотно-скоростных характеристик двигателя.
Далее по предварительно сформированной двухмерной таблице при текущей величине критического сечения сопла и рассчитанной величине площади выходного сечения сопла определяется величина согласованного выдвижения штоков гидроприводов, после чего система отрабатывает рассогласование, как указано выше.
На сверхзвуковых режимах с осесимметричным положением сверхзвуковых створок сопла (при отсутствии сигнала управления вектором тяги) в процессе выполнения маневров самолета под действием динамических нагрузок происходит искажение формы критического сечения сопла, в частности может иметь место его «овализация». В этом случае использование диаметра критического сечения сопла в качестве параметра, характеризующего площадь критического сечения сопла, может привести к значительным ошибкам при определении этой площади, а, следовательно, к ошибкам при регулировании сопла. Результатом таких ошибок может стать потеря величины тяги.
Поэтому при регулировании сопла в таких условиях целесообразно перейти к совокупности параметров, более точно (по сравнению с диаметром критического сечения) отражающих площадь его критического сечения. В частности, среди таких параметров могут быть выбраны: угол отклонения рычага управления двигателем (αРУД) и температура воздуха на входе в двигатель (T*1). В этом случае вместо датчика 6 диаметра критического сечения сопла (ДКР) система регулирования оснащается датчиком угла отклонения рычага управления двигателем (αРУД) и датчиком температуры воздуха на входе в двигатель (T*1), которые подключаются к информационным входам регулятора 1 (датчики на чертеже не показаны). Для получения значений FKP регулятор 1 использует таблицу пересчета FКР=f(αРУД; Т*1).
При всеракурсном управлении вектором тяги также имеет место значительная «овализация» критического сечения, поскольку реакция газовых сил от сверхзвуковых створок приходится на дозвуковые створки, которые находятся под управлением, как правило, регулятора степени расширения газа в турбине (работа указанного регулятора в рамках настоящей заявки не рассматривается). В области высот до 8 км и скоростей до 600 км/ч газовые силы, приходящиеся на дозвуковые створки невелики. Для их компенсации регулятор степени расширения газа в турбине формирует относительно небольшие перепады давления в гидроцилиндрах, т.е. усилия на штоках гидроцилиндров управления критическим сечением сопла (указанные гидроцилиндры на чертеже не показаны) также невелики. Например, на режиме полного форсажа в стендовых условиях для поддержания заданной величины степени расширения газа в турбине достаточно усилия на штоках гидроцилиндров 600 кг. В то же время, на каждый из указанных штоков со стороны сверхзвуковых створок сопла воздействует усилие до 4000 кг. Искажения формы критического сечения сопла приводят к ошибкам в определении его площади, а при управлении вектором тяги наличие таких ошибок, приводящих к потере величины тяги, нежелательно. Поэтому и на режимах с управлением вектором тяги в качестве параметров, характеризующих площадь критического сечения сопла двигателя, принимают угол отклонения рычага управления двигателем и температуру воздуха на входе в двигатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СОПЛОМ С РЕГУЛИРУЕМЫМ ВЕКТОРОМ ТЯГИ АВИАЦИОННОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2326258C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| РЕГУЛИРУЕМОЕ ПЛОСКОЕ СОПЛО ДЛЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2193680C2 |
| Регулируемое сопло турбореактивного двигателя | 2021 |
|
RU2768659C1 |
| Регулируемое сопло турбореактивного двигателя | 2021 |
|
RU2770572C1 |
| СПОСОБ КАЛИБРОВКИ МНОЖЕСТВА ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ, ПРИСОЕДИНЁННЫХ К ПРИВОДНОМУ КОЛЬЦУ, В СИСТЕМЕ УПРАВЛЕНИЯ ДЛЯ ПОВОРОТА ВЫХЛОПНЫХ СТВОРОК В ПОВОРОТНОМ СОПЛЕ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ РЕГУЛИРОВАНИЯ ВЕЛИЧИНЫ ПЕРЕМЕЩЕНИЯ МНОЖЕСТВА РАСПРЕДЕЛЁННЫХ ПО ОКРУЖНОСТИ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ | 1999 |
|
RU2222707C2 |
| РЕГУЛИРУЕМОЕ СОПЛО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2183282C1 |
| СИСТЕМА СОПЕЛ ДВУХКОНТУРНОГО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2018 |
|
RU2716651C2 |
| РЕГУЛИРУЕМОЕ СОПЛО АВИАЦИОННОГО ДВИГАТЕЛЯ С ОТКЛОНЯЕМЫМ ВЕКТОРОМ ТЯГИ | 1997 |
|
RU2142571C1 |
| ВЫХОДНОЕ ДВУХМЕРНОЕ СОПЛО ДЛЯ ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2232281C1 |
Изобретение относится к технологиям регулирования авиационных газотурбинных двигателей (ГТД), в частности к способам регулирования сопла с управляемым вектором тяги. Такие сопла, как правило, оснащены приводным кольцом, управляющим сверхзвуковыми створками сопла, и гидроприводами управления со штоками, присоединенными к приводному кольцу, а также гидроприводами управления критическим сечением сопла. Технический результат - повышение тяговых характеристик двигателя на сверхзвуковых режимах с осесимметричным положением сверхзвуковых створок сопла путем оптимизации процесса управления этими створками. Указанный результат достигается тем, что в способе регулирования сопла с управляемым вектором тяги авиационного газотурбинного двигателя, включающем измерение параметра, характеризующего площадь критического сечения сопла, определение ее величины, изменение положения штоков гидроприводов управления сверхзвуковыми створками, при наличии сигнала управления вектором тяги, в соответствии с площадью критического сечения сопла, а также сигналами задания углов тангажа и рыскания летательного аппарата, при отсутствии сигнала управления вектором тяги дополнительно измеряют давление газа за турбиной, давление, характеризующее давление на срезе сверхзвуковых створок, по дополнительно измеренным параметрам и площади критического сечения сопла определяют потребную площадь выходного сечения сопла, а положение штоков гидроприводов изменяют в соответствии с предварительно определенной зависимостью площади выходного сечения сопла от положения штока гидропривода при фиксированных значениях площади критического сечения сопла. Указанный результат достигается также тем, что при определении площади критического сечения сопла в качестве параметров, характеризующих ее величину, принимают угол отклонения рычага управления двигателем и температуру воздуха на входе в двигатель. При этом достигается дополнительное повышение тяговых характеристик двигателя. 1 з.п. ф-лы, 1 ил.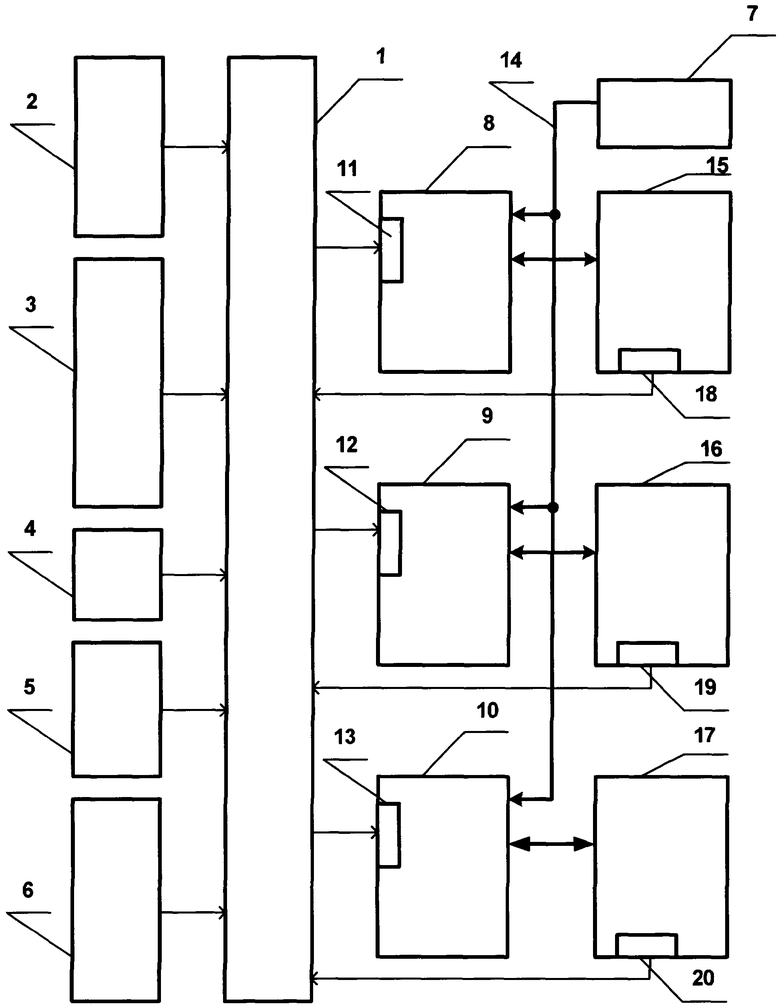
| Демонстрационное сопло с изменяемым вектором тяги фирмы ITP | |||
| - ЦИАМ, экспресс-информация по материалам иностранной печати, серия "Авиационное двигателестроение", №44, октябрь 1999, с.1-8 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ СТВОРОК ВЫХЛОПНОГО СОПЛА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1992 |
|
RU2038503C1 |
| ВЫХОДНОЕ ДВУХМЕРНОЕ СОПЛО ДЛЯ ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2232281C1 |
| ОСЕСИММЕТРИЧНОЕ СВЕРХЗВУКОВОЕ РЕАКТИВНОЕ СОПЛО | 2000 |
|
RU2208693C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 0 |
|
SU211948A1 |
| Пуансон для обтяжки профильных деталей | 1974 |
|
SU512833A1 |
| US 5577381 А, 26.11.1996. | |||

