Настоящее изобретение относится к самодвижущемуся роботу, более конкретно к технологии беспроводного управления самодвижущимся роботом и множеством внешних устройств, связанных с ним посредством сети, из местоположений внутри и снаружи помещений.
Роботы разрабатываются для промышленных целей и используются в качестве компонента автоматизации на производстве. Роботы также используются, вместо живых существ, для сбора информации в экстремальных условиях окружающей среды, к которой не могут иметь доступа живые существа. Робототехника развивается высокими темпами применительно к наиболее перспективным отраслям разработок. В последнее время разработаны даже роботы для бытового применения, обеспечивающие удобства для человека. Типовым примером такого дружественного для людей домашнего робота является самодвижущийся робот-уборщик.
Самодвижущийся робот-уборщик представляет собой устройство, которое всасывает пыль или другие инородные частицы в процессе автоматического перемещения в конкретной области уборки, например, в жилом помещении или офисе. В дополнение к компонентам обычного пылесоса, который всасывает пыль или другие инородные частицы, самодвижущийся робот-уборщик содержит блок перемещения, включающий в себя двигатели левого и правого колес для перемещения робота-уборщика, ряд датчиков обнаружения, обеспечивающих обнаружение множества препятствий, чтобы робот перемещался без столкновений с препятствиями в зоне уборки, микропроцессор для общего управления роботом.
Обычно самодвижущийся робот управляется в соответствии с сигналом управления, передаваемым от удаленного контроллера, который обеспечивается вместе с самодвижущимся роботом. Множество устройств передачи сигналов используются для запрета самодвижущемуся роботу выходить из предварительно определенной зоны.
Вместе с быстрым развитием промышленности реализуется формирование домашних сетей, чтобы использовать жилище не только как простое место обитания, но и обеспечивать пользователю возможность удобного выполнения ряда действий в жилом помещении с использованием компьютерных и коммуникационных технологий. Проще говоря, домашние сети представляют собой технологию для автоматического контроля и управления электрическими, водопроводными, нагревательными, следящими и т.п. устройствами в домашних условиях с использованием компьютерных и электронных коммуникационных технологий. Формирование домашних сетей развивается с целью управления различными устройствами в жилом помещении с использованием одного пульта из местоположений внутри или снаружи помещений. Такие устройства, соединенные с локальной сетью (LAN), установленной с использованием компьютера и кабелей, а также соединенные через Интернет, уже являются доступными на рынке.
Однако когда используется локальная сеть на основе компьютера, то множество бытовых устройств (также упоминаемых как внешние устройства) должны быть соединены с компьютером, который осуществляет управление этими устройствами, так что для установления сети требуются высокие затраты на инсталляцию и длительное время. Такая сеть также отличается недостаточной масштабируемостью, поскольку новые соединения должны инсталлироваться для каждого устройства, добавляемого к сети.
Поэтому настоящее изобретение было создано ввиду вышеуказанных проблем, и задачей изобретения является создание системы управления самодвижущимся роботом, причем самодвижущийся робот и ряд внешних устройств, соединенных с ним, могут управляться с использованием одного беспроводного блока управления, не требуя установления отдельной сети.
Также задачей изобретения является создание системы управления самодвижущимся роботом, причем самодвижущийся робот может осуществлять сбор и обеспечение информации о состоянии устройства передачи сигналов и информации среды в зоне, где установлено устройство передачи сигналов, для пользователя посредством двусторонней связи.
Еще одной задачей изобретения является создание системы управления самодвижущимся роботом, причем самодвижущийся робот и ряд внешних устройств, соединенных с ним, могут управляться из удаленных местоположений.
В соответствии с одним аспектом настоящего изобретения, вышеуказанные и другие задачи изобретения могут быть решены путем создания домашней сетевой системы, использующей самодвижущийся робот, причем домашняя сетевая система содержит, по меньшей мере, одно внешнее устройство, самодвижущийся робот для выполнения задачи, соответствующей принятой беспроводным способом операционной команде, передачи возбуждающего сигнала в пределах определенной дальности и вывода управляющего сигнала на доступное внешнее устройство; работающий беспроводным способом блок для беспроводной передачи операционной команды, введенной пользователем, на самодвижущийся робот и вывода управляющего сигнала для управления доступным внешним устройством на доступное внешнее устройство, причем информация о доступности доступного внешнего устройства обеспечивается от самодвижущегося робота; и множество устройств передачи сигналов, каждое из которых обнаруживает возбуждающий сигнал, переданный от самодвижущегося робота, и активизируется в соответствии с возбуждающим сигналом, передает информацию о состоянии, включающую в себя идентификационную информацию устройства передачи сигнала, на самодвижущийся робот, если устройство передачи сигнала активизировано, и передает сигнал изменения направления для самодвижущегося робота в конкретном направлении.
В этой домашней сетевой системе внешние устройства, к которым самодвижущийся робот может получить доступ через беспроводную сеть, могут управляться с использованием единственного беспроводного операционного блока, который обеспечен вместе с самодвижущимся роботом, без установки какого-либо отдельного соединения.
В соответствии с другим аспектом настоящего изобретения, предусмотрена домашняя сетевая система, использующая самодвижущийся робот, причем домашняя сетевая система содержит, по меньшей мере, одно внешнее устройство; самодвижущийся робот для выполнения задачи, соответствующей принятой беспроводным способом операционной команде, передачи возбуждающего сигнала в пределах определенной дальности и вывода управляющего сигнала на доступное внешнее устройство; главное устройство, соединенное с пользовательским терминалом через коммутируемую телефонную сеть общего пользования (PSTN), причем главное устройство передает операционную команду, введенную пользователем через пользовательский терминал, на самодвижущийся робот, и передачи информации, принятой от самодвижущегося робота, которая указывает, принята или нет операционная команда, на пользовательский терминал; и множество устройств передачи сигнала, каждое из которых обнаруживает возбуждающий сигнал, переданный от самодвижущегося робота, и активизируется в соответствии с возбуждающим сигналом, передает информацию о состоянии, включающую в себя идентификационную информацию устройства передачи сигнала, на самодвижущийся робот, если устройство передачи сигнала активизировано, и передает сигнал изменения направления для самодвижущегося робота в конкретном направлении.
В этой домашней сетевой системе пользователь может управлять самодвижущимся роботом в жилом помещении из местоположений вне помещения, с использованием пользовательского телефона, такого как стационарный телефон или мобильный телефон (или мобильный коммуникационный терминал), или с использованием пользовательского терминала, соединенного через сеть, такую как Интернет, и может также управлять работой внешних устройств, к которым самодвижущийся робот может получить доступ через беспроводную сеть, без установки какого-либо отдельного соединения.
Вышеуказанные и другие задачи, признаки и другие преимущества настоящего изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами, на которых представлено следующее:
фиг.1 - схематичное представление домашней сетевой системы, использующей самодвижущийся робот, в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
фиг.2 - блок-схема робота-уборщика в качестве примера самодвижущегося робота с фиг.1;
фиг.3 - блок-схема устройства передачи сигналов с фиг.1;
фиг.4 - блок-схема беспроводного операционного блока с фиг.1;
фиг.5 - схематичное представление домашней сетевой системы, использующей самодвижущийся робот, в соответствии с другим вариантом осуществления настоящего изобретения, и
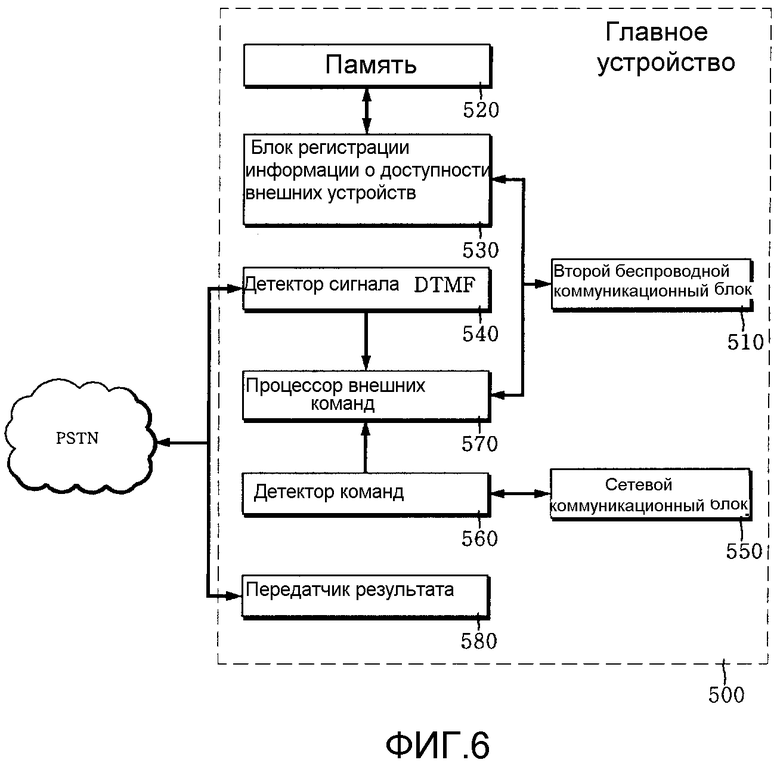
фиг.6 - блок-схема главного устройства с фиг.5.
Ниже подробно описаны предпочтительные варианты осуществления изобретения со ссылками на чертежи, чтобы настоящее изобретение могло быть легко понято и реализовано специалистами в данной области техники.
На фиг.1 схематично показана домашняя сетевая система, использующая самодвижущийся робот, в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Как показано на фиг.1, домашняя сетевая система содержит самодвижущийся робот 100, множество устройств 200 передачи сигналов и беспроводный операционный блок 300. Самодвижущийся робот 100 принимает переданную беспроводным способом операционную команду, передает информацию, указывающую, принята или нет операционная команда, и выполняет задачу в соответствии с принятой операционной командой. Самодвижущийся робот 100 также передает возбуждающий сигнал в пределах конкретной дальности и выводит управляющий сигнал на доступное внешнее устройство. Каждое из множества устройств передачи сигналов обнаруживает возбуждающий сигнал, переданный от самодвижущегося робота 100, и активизируется в соответствии с возбуждающим сигналом. Если устройство передачи сигнала активизировано, то устройство передачи сигнала передает свою информацию о состоянии, включая идентификационную информацию устройства передачи сигнала, на самодвижущийся робот 100, и передает сигнал изменения направления для самодвижущегося робота 100 в конкретном направлении. Беспроводный операционный блок 300 беспроводным способом передает входную операционную команду на самодвижущийся робот 100. Беспроводный операционный блок 300 отображает пользователю информацию, указывающую принял или нет самодвижущийся робот 100 операционную команду и/или информацию о состоянии устройства 200 передачи сигналов, которые были переданы от самодвижущегося робота 100. Беспроводный операционный блок 300 также выводит управляющий сигнал для доступного внешнего устройства, информация доступности которых обеспечена от самодвижущегося робота 100, на доступное внешнее устройство через самодвижущийся робот 100.
Самодвижущийся робот 100 выполняет задачу при автоматическом перемещении в пределах конкретной области в соответствии с установленной программой. Типовой коммерчески доступный пример самодвижущегося робота 100 представляет собой робот-уборщик, который всасывает пыль или иные инородные частицы при свободном перемещении в пределах предварительно заданной области.
Самодвижущийся робот 100, согласно настоящему изобретению, описан ниже более подробно со ссылкой на фиг.2 в предположении, что самодвижущийся робот 100 представляет собой робот-уборщик.
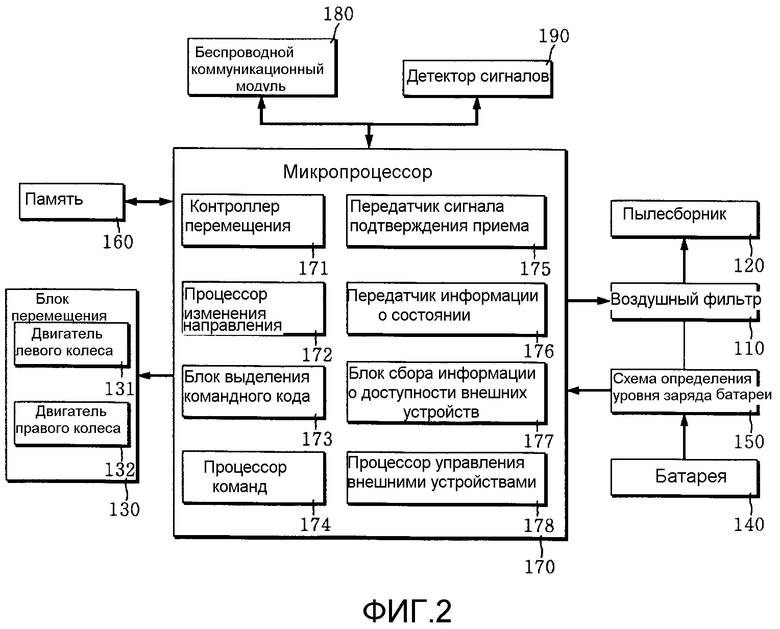
На фиг.2 показана блок-схема робота-уборщика в качестве примера самодвижущегося робота по фиг.1. Как показано на фиг.2, робот-уборщик 100, согласно настоящему изобретению, содержит беспроводный коммуникационный модуль 180, детектор 190 сигналов и память 160, в дополнение к основным компонентам обычного робота-уборщика, которые описаны ниже. Беспроводный коммуникационный модуль 180 передает возбуждающий сигнал для устройства 200 передачи сигналов в пределах конкретной дальности и передает и принимает данные к/от беспроводного операционного блока 300 и/или устройства 200 передачи сигналов, которое активизируется возбуждающим сигналом. Детектор 190 сигналов обнаруживает сигнал изменения направления, переданный устройством 200 передачи сигналов. Память 160 сохраняет операционную программу и идентификационную информацию робота-уборщика 100.
Основные компоненты робота-уборщика 100 включают в себя воздушный фильтр 11, пылесборник 120, блок 130 перемещения, батарею 140, схему 150 определения уровня заряда батареи и микропроцессор 170. Воздушный фильтр 110 содержит датчик пыли для обнаружения пыли или других инородных частиц в зоне уборки. Воздушный фильтр 110 всасывает пыль или другие инородные частицы, обнаруженные датчиком пыли. Пылесборник 120 принимает пыль и другие инородные частицы, собранные воздушным фильтром 110. Блок 130 перемещения обеспечивает возможность перемещения робота-уборщика 100. Батарея 140 подает энергопитание для работы пылесборника 110 и блока 130 перемещения. Схема 150 определения уровня заряда батареи определяет уровень заряда батареи 140 с интервалами, равными определенному периоду, и выводит сигнал запроса подзаряда, если уровень заряда батареи соответствует предварительно заданному уровню или ниже этого уровня. Микропроцессор 170 управляет всей работой робота-уборщика 100.
Воздушный фильтр 110, пылесборник 120, батарея 140 и схема 150 определения уровня заряда батареи, относящиеся к основным компонентам робота-уборщика 100, хорошо известны в технике и поэтому детальное их описание здесь не приводится.
Память 160 включает в себя, например, энергонезависимую память, такую как электронно-стираемая перепрограммируемая постоянная память (EEPROM) или флэш-память. Память 160 сохраняет операционную программу для работы робота-уборщика 100 и идентификационную информацию, уникальную для робота-уборщика 100. Доступ к операционной программе и к идентификационной информации, сохраненным в памяти 160, контролируется микропроцессором 170.
Беспроводный коммуникационный модуль 180 типа беспроводной коммуникационной модели принимает операционную команду, переданную от беспроводного операционного блока 300, и передает принятую операционную команду. Беспроводный коммуникационный модуль 180 передает сигнал подтверждения приема операционной команды, указывающий на то, принята или нет операционная команда, к беспроводному операционному блоку 300, а также передает информацию о результате исполнения задачи для задачи, которую робот-уборщик 100 исполнил в соответствии с принятой операционной командой, к беспроводному операционному блоку 300. Например, информация о результате исполнения команды может включать операционную информацию робота-уборщика 100, например информацию, указывающую, что робот-уборщик 100 выполнил задачу, и информацию об ошибке, указывающую, что робот-уборщик 100 не выполнил задачу. Беспроводный коммуникационный модуль 180 передает возбуждающий сигнал для устройства 200 передачи сигналов в пределах конкретной дальности и принимает информацию о состоянии устройства 200 передачи сигналов, переданную устройством 200 передачи сигналов, активизированным посредством возбуждающего сигнала. Беспроводный коммуникационный модуль 180 также передает и принимает данные к/от доступного внешнего устройства. Эта передача и прием данных к/от доступного внешнего устройства описана более подробно ниже.
Детектор 190 сигналов обнаруживает сигнал изменения направления, такой как инфракрасный сигнал, имеющий конкретную направленность, переданный устройством 200 передачи сигналов, активизированным возбуждающим сигналом, и выводит обнаруженный сигнал изменения на микропроцессор 170. Детектор 190 сигналов должен быть всего лишь детектором, который может обнаружить сигналы изменения направления во множестве форматов, передаваемых устройством 200 передачи сигналов. Например, детектор 190 сигналов может представлять собой инфракрасный датчик, если устройство 200 передачи сигналов передает инфракрасные сигналы.
Блок 130 перемещения перемещает робот-уборщик 100 посредством двигателей 131 и 132 левого и правого колес в соответствии с управляющими сигналами, выводимыми с микропроцессора 170. Двигатели 131 и 132 левого и правого колес блока 130 перемещения связаны с левым и правым колесами для перемещения робота-уборщика 100. Робот-уборщик 100 перемещается взад и вперед и вокруг в соответствии со скоростью и направлением вращения двигателей 131 и 132 левого и правого колес.
Микропроцессор 170 содержит контроллер 171 перемещения, процессор 172 изменения направления, блок 173 выделения кода команды, процессор 174 команд, передатчик 175 сигнала подтверждения приема, передатчик 176 информации о состоянии, блок 177 сбора информации о доступности внешних устройств и процессор 178 управления внешним устройством. Контроллер 171 перемещения управляет работой блока 130 перемещения. Процессор 172 изменения направления выводит управляющий сигнал на контроллер 171 перемещения для изменения направления перемещения робота-уборщика 100 в соответствии с сигналом изменения направления, выведенного с детектора 190 сигналов. Блок 173 выделения кода команды принимает и анализирует операционную команду, переданную от беспроводного операционного блока 300, и выделяет код команды из операционной команды. Процессор 174 команд активизирует робот-уборщик 100 в соответствии с кодом команды, выделенным блоком 173 выделения кода команды. Передатчик 175 сигнала подтверждения приема передает информацию, указывающую, принята или нет операционная команда, на беспроводный операционный блок 300 посредством беспроводного коммуникационного модуля 180. Передатчик 176 информации о состоянии принимает информацию о состоянии, переданную устройством 200 передачи сигналов, и передает информацию о состоянии на беспроводный операционный блок 300 посредством беспроводного коммуникационного модуля 180. Блок 177 сбора информации о доступности внешних устройств принимает информацию о доступности внешних устройств или принимает и выдает информацию о доступности на беспроводный операционный блок 300. Процессор 178 управления внешним устройством принимает сигнал управления внешним устройством, включая идентификационную информацию внешнего устройства, от беспроводного операционного блока 300 и выводит принятый сигнал управления внешним устройством на внешнее устройство, соответствующее идентификационной информации.
Контроллер 171 перемещения перемещает робот-уборщик 100 в соответствии с управляющей командой, выведенной операционной программой робота-уборщика 100.
Процессор 172 изменения направления принимает сигнал изменения направления с устройства передачи сигнала, обнаруженный детектором 190 сигналов, и выводит управляющий сигнал, соответствующий изменению направления, на контроллер 171 перемещения, препятствующий выходу робота-уборщика 100 из зоны уборки.
Устройства 200 передачи сигналов установлены вдоль границы предварительно заданной области перемещения робота-уборщика 100, чтобы препятствовать выходу робота-уборщика 100 из зоны уборки. Например, устройство 200 передачи сигналов представляет собой устройство, которое передает сигнал изменения направления для робота-уборщика 100, такой как инфракрасный сигнал, в определенном направлении. Примером устройства 200 передачи сигналов является маяк. После обнаружения сигнала изменения направления, переданного устройством 200 передачи сигналов, робот-уборщик 100 изменяет свое направление перемещения таким образом, что ему не разрешается выход из зоны уборки.
Операционная команда, переданная от беспроводного операционного блока 300, включает в себя идентификационную информацию и код команды. Блок 173 выделения кода команды анализирует операционную команду, принятую от беспроводного коммуникационного модуля 180, выделяет код команды из операционной команды и передает выделенный код команды на процессор 174 команд.
Процессор 174 команд управляет работой робота-уборщика 100 в соответствии с кодом команды, выделенным блоком 173 выделения кода команды. Информация результата выполнения задачи для задачи, которая выполнялась роботом-уборщиком 100 в соответствии с принятой операционной командой, также передается на беспроводный операционный блок 300. Например, информация результата выполнения задачи может включать в себя информацию операции робота-уборщика 100, такую как информация, указывающая, что робот-уборщик 100 выполняет задачу, и информация ошибки, указывающая, что робот-уборщик 100 не смог выполнить задачу.
Например, когда пользователь вводит команду возвратить робот-уборщик 100 к зарядному устройству посредством беспроводного операционного блока 300, который находится у пользователя, беспроводный операционный блок 300 передает операционную команду, включающую в себя код операции, соответствующий введенной команде, и идентификационную информацию робота-уборщика 100, который должен выполнять команду, в беспроводный коммуникационный модуль 180.
Беспроводный коммуникационный модуль 180 робота-уборщика 100 принимает и выводит операционную команду на микропроцессор 170. Процессор 174 команд в микропроцессоре 170 генерирует сигнал подтверждения приема операционной команды, указывающий, что операционная команда была принята, и передает ее на беспроводный операционный блок 300 через беспроводный коммуникационный модуль 180.
Блок 173 выделения кода команды анализирует принятую операционную команду, выделяет команду возврата к зарядному устройству из операционной команды и передает команду возврата к зарядному устройству в процессор 174 команд. Процессор 174 команд активизирует алгоритм возврата к зарядному устройству в соответствии с командой возврата к зарядному устройству, переданной из блока 173 выделения кода команды, и выводит управляющий сигнал на контроллер 171 перемещения для возврата робота-уборщика 100 к зарядному устройству.
После того как робот-уборщик 100 возвратился к зарядному устройству, процессор 174 команд передает информацию о результате выполнения задачи, которая показывает, что робот-уборщик 100 возвратился к зарядному устройству, на беспроводный операционный блок 300. Беспроводный операционный блок 300 отображает информацию о результате выполнения задачи, принятую от процессора 174 команд, чтобы проинформировать пользователя, что робот-уборщик 100 возвратился к зарядному устройству.
Передатчик 175 сигнала подтверждения приема передает сигнал подтверждения приема операционной команды, указывающий, была ли принята операционная команда от беспроводного операционного блока 300, на беспроводный операционный блок 300 через беспроводный коммуникационный модуль 180.
Передатчик 176 информации о состоянии принимает сигнал состояния, передаваемый от устройства 200 передачи сигналов, и передает принятый сигнал состояния на беспроводный операционный блок 30, так что он выдается пользователю. В данном случае сигнал состояния передается в пределах конкретной дальности от робота-уборщика 100. Например, сигнал состояния, передаваемый от устройства 200 передачи сигналов, может включать в себя идентификационную информацию, информацию об уровне заряда батареи, информацию, указывающую температуру, влажность или состояние утечки газа для области, где расположено устройство 200 передачи сигналов, и информацию, указывающую, прошел ли робот-уборщик 100 через данную область.
Блок 177 сбора информации о доступности внешних устройств передает сигнал запроса информации о доступности внешнего устройства в ответ на запрос информации о доступности внешнего устройства, преданный от беспроводного операционного блока 300. Блок 177 сбора информации о доступности внешних устройств принимает информацию о доступности, включающую в себя идентификационную информацию доступного внешнего устройства, переданную от внешнего устройства, которое может быть доступным для робота-уборщика 100, посредством беспроводной передачи данных, и передает принятую информацию о доступности на беспроводный операционный блок 300 через беспроводный коммуникационный модуль 180.
Когда пользователь вводит запрос на поиск доступного внешнего устройства с использованием беспроводного операционного блока 300, беспроводный операционный блок 300 передает соответствующий сигнал поиска на робот-уборщик 100, и робот-уборщик 100 передает сигнал запроса информации о доступности. Внешние устройства, которые могут быть доступными для робота-уборщика 100 посредством беспроводной передачи данных, передают информацию о доступности, включающую в себя идентификационную информацию, на робот-уборщик 100. Блок 177 сбора информации о доступности внешних устройств робота-уборщика 100 передает информацию о доступности, полученную от внешних устройств, через беспроводный операционный блок 300. Беспроводный операционный блок 300 сохраняет информацию о доступности внешних устройств, переданную от робота-уборщика 100.
Процессор 178 управления внешним устройством принимает сигнал управления внешним устройством, включающий в себя идентификационную информацию внешнего устройства, от беспроводного операционного блока 300 и выводит принятый управляющий сигнал на внешнее устройство, соответствующее идентификационной информации. Например, если пользователь вводит команду управления возбуждением внешнего устройства, например команду включения/выключения или команду управления температурой кондиционера воздуха, то беспроводный операционный блок 300 выводит сигнал управления внешним устройством, включающий в себя идентификационную информацию кондиционера воздуха, на робот-уборщик 100. Процессор 178 управления внешним устройством робота-уборщика 100 принимает и выводит сигнал управления внешним устройством, например команду включения/выключения или команду управления температурой, на кондиционер воздуха соответственно идентификационной информации.
Устройства 200 передачи сигналов установлены вдоль границы предварительно заданной области перемещения робота-уборщика 100, чтобы препятствовать выходу робота-уборщика 100 за пределы этой области перемещения. Например, устройство 200 передачи сигналов представляет собой устройство, которое передает сигнал изменения направления для робота-уборщика 100, например инфракрасный сигнал в конкретном направлении. После обнаружения сигнала изменения направления, переданного от устройства 200 передачи сигналов, робот-уборщик 100 изменяет свое направление перемещения, так что ему не разрешается выходить из области перемещения.
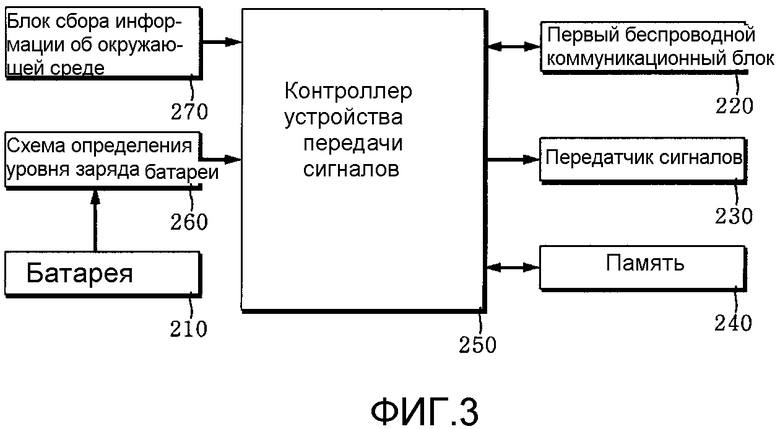
Устройство 200 передачи сигналов описано ниже более детально со ссылкой на фиг.3. На фиг.3 показана блок-схема устройства передачи сигналов по фиг.1. Как показано на фиг.3, устройство 200 передачи сигналов, соответствующе настоящему изобретению, содержит батарею 210, первый беспроводный коммуникационный блок 220, передатчик 230 сигналов, память 240 и контроллер 250 устройства передачи сигналов. Батарея 210 обеспечивает энергопитание для устройства 200 передачи сигналов. Первый беспроводный коммуникационный блок 220 принимает возбуждающий сигнал, переданный от самодвижущегося робота 100, и передает и принимает данные к/от самодвижущегося робота 100. Передатчик 230 сигналов передает сигнал изменения направления для самодвижущегося робота 100 в конкретном направлении. Память 240 хранит идентификационную информацию устройства 200 передачи сигналов. Контроллер 250 устройства передачи сигналов активизирует устройство 200 передачи сигналов в соответствии с возбуждающим сигналом, принятым первым беспроводным коммуникационным блоком 220. При активизации устройства 200 передачи сигналов контроллер 250 устройства передачи сигналов передает информацию о состоянии, включающую в себя идентификационную информацию устройства 200 передачи сигналов, на самодвижущийся робот 100 через первый беспроводный коммуникационный блок 220 и выводит управляющий сигнал для управления работой передатчика 230 сигналов.
Батарея 210 обеспечивает энергопитание для возбуждения устройства 200 передачи сигналов. Например, в качестве батареи 210 может использоваться обычная первичная батарея или вторичная батарея, которая имеет возможность подзарядки и используется в течение продолжительного времени.
Первый беспроводный коммуникационный блок 220 является коммуникационным модемом того же типа, что и беспроводный коммуникационный модуль 180 самодвижущегося робота 100. Первый беспроводный коммуникационный блок 220 принимает возбуждающий сигнал, переданный в пределах заданного диапазона от самодвижущегося робота 100, и выводит принятый возбуждающий сигнал на контроллер 250 устройства передачи сигналов. Первый беспроводный коммуникационный блок 220 также передает информацию о состоянии с выхода контроллера 250 устройства передачи сигналов на беспроводный коммуникационный модуль 180 самодвижущегося робота 100.
Передатчик 230 сигналов передает направленный сигнал, такой как инфракрасное излучение, чтобы воспрепятствовать выходу самодвижущегося робота 100 из заданной области, где самодвижущийся робот 100 должен выполнять свою задачу. Например, передатчик 230 сигналов представляет собой передатчик сигналов инфракрасного диапазона. Когда каждый из множества устройств 200 передачи сигналов активизирован, он передает сигнал изменения направления для самодвижущегося робота 100 посредством передатчика 230 сигналов, и самодвижущийся робот 100 обнаруживает сигнал изменения направления и изменяет свое направление перемещения в соответствии с сигналом изменения направления таким образом, чтобы не выходить из заданной области.
Например, контроллер 250 устройства передачи сигналов может быть реализован как интегральная схема, например как микроконтроллер. Контроллер 250 устройства передачи сигналов принимает возбуждающий сигнал, обнаруженный и выданный первым беспроводным коммуникационным блоком 220, и активизирует устройство 200 передачи сигналов в соответствии с принятым возбуждающим сигналом. В данном случае контроллер 250 устройства передачи сигналов передает информацию о состоянии, включающую в себя идентификационную информацию устройства 200 передачи сигналов, на самодвижущийся робот 100.
Если самодвижущийся робот 100 обнаружил сигнал изменения направления и изменил свое направление перемещения таким образом, что первый беспроводный коммуникационный блок 220 больше не принимает возбуждающий сигнал, передаваемый в пределах заданного диапазона от самодвижущегося робота 100, контроллер 250 устройства передачи сигналов выключает питание каждого компонента устройства 200 передачи сигналов, чтобы остановить работу каждого компонента.
Согласно дополнительному аспекту настоящего изобретения, устройство 200 передачи сигналов дополнительно содержит схему 260 определения уровня заряда батареи, определяющую уровень заряда батареи 210 с интервалами длительностью в конкретный период, и выводит сигнал запроса подзаряда на контроллер 250 устройства передачи сигналов, когда обнаруженный уровень находится на заданном уровне или ниже его.
Схема 260 определения уровня заряда батареи делит напряжение, получаемое от батареи 210, которая встроена в устройство 200 передачи сигналов для обеспечения энергопитания, в определенном отношении сопротивлений делителя, и определяет уровень заряда батареи 210 на основе уровня напряжения с делителя. Если обнаруженный уровень заряда батареи 210 соответствует уровню опорного напряжения или ниже его, то схема 260 определения уровня заряда батареи выводит сигнал запроса подзаряда на контроллер 250 устройства передачи сигналов.
Контроллер 250 устройства передачи сигналов передает информацию о состоянии, включающую в себя информацию о заряде батареи, на самодвижущийся робот 100 в соответствии с сигналом запроса подзаряда с выхода схемы 260 определения уровня заряда батареи. Самодвижущийся робот 100 передает информацию о состоянии, включающую в себя информацию о заряде батареи, переданную от устройства 200 передачи сигналов, на беспроводный операционный блок 300. Беспроводный операционный блок 300 отображает пользователю запрос подзаряда батареи от устройства 200 передачи сигналов.
Согласно другому аспекту настоящего изобретения, устройство 200 передачи сигналов также содержит блок 270 сбора информации об окружающей среде, который определяет информацию об окружающей среде, включая информацию, указывающую на температуру, влажность или состояние утечки газа в области, где находится устройство 200 передачи сигналов, или информацию, указывающую на то, прошел ли самодвижущийся робот 100 через эту область.
Например, блок 270 сбора информации об окружающей среде содержит множество датчиков, таких как датчики температуры, влажности или утечки газа. Информация об окружающей среде, определенная этими датчиками, выводится на контроллер 250 устройства передачи сигналов. Контроллер 250 устройства передачи сигналов передает информацию о состоянии, включающую в себя информацию об окружающей среде, собранную блоком 270 сбора информации об окружающей среде, на самодвижущийся робот 100.
Самодвижущийся робот 100 передает информацию о состоянии, включающую в себя информацию об окружающей среде, принятую от устройства 200 передачи сигналов, на беспроводный операционный блок 300. Беспроводный операционный блок 300 отображает пользователю информацию, указывающую на температуру, влажность или состояние утечки газа в области, где находится устройство 200 передачи сигналов, и информацию, указывающую на то, прошел ли самодвижущийся робот 100 через эту область, собранную блоком 270 сбора информации об окружающей среде.
Соответственно, пользователь может легко проверить различную информацию, собранную самодвижущимся роботом 100, посредством беспроводного операционного блока 300.
Беспроводный операционный блок 300 представляет собой дистанционный контроллер, обеспечиваемый вместе с самодвижущимся роботом 100. Беспроводный операционный блок 300 передает операционную команду, введенную пользователем, на самодвижущийся робот 100 посредством беспроводной передачи данных и отображает пользователю информацию, указывающую на то, принята или нет операционная команда, информацию о состоянии устройства 200 передачи сигналов, которая была передана от самодвижущегося робота 100. Беспроводный операционный блок 300 описан ниже более детально со ссылками на фиг.4.
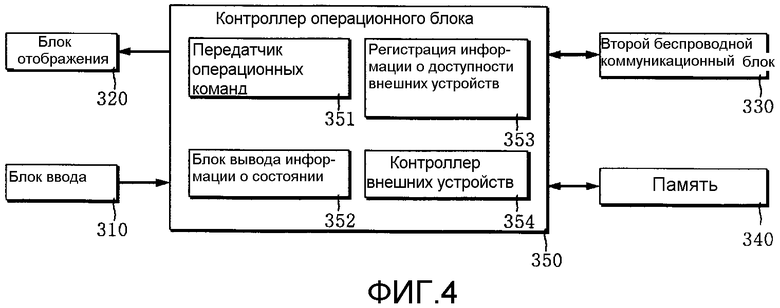
На фиг.4 показана блок-схема беспроводного операционного блока 300 по фиг.1. Беспроводный операционный блок 300, согласно настоящему изобретению, содержит блок 310 ввода, блок 320 отображения, второй беспроводный коммуникационный блок 330, память 340 и контроллер 350 операционного блока. Блок 310 ввода принимает операционную команду от пользователя. Блок 320 отображения отображает операционную команду, принятую от блока 310 ввода, информацию, указывающую, принята ли операционная команда, и информацию о состоянии устройства 200 передачи сигналов, которая была передана от самодвижущегося робота 100. Второй беспроводный коммуникационный блок 330 передает и принимает данные к/от самодвижущегося робота 100. Память 340 сохраняет информацию о доступности внешних устройств, переданную от блока 177 сбора информации о доступности внешних устройств самодвижущегося робота 100 через второй беспроводный коммуникационный блок 330. Контроллер 350 операционного блока управляет работой в целом беспроводного операционного блока 300.
Блок 310 ввода содержит множество клавиш/кнопок, включая числовые, знаковые и функциональные клавиши. Когда пользователь нажимает клавиши/кнопки на блоке 310 ввода для введения операционной команды, блок 310 ввода генерирует и выводит сигналы, обнаруженные в результате нажатия клавиш/кнопок. Например, блок 320 отображения реализован как светодиодный дисплей и отображает пользователю операционную команду, введенную посредством блока 310 ввода, сигнал подтверждения приема операционной команды или информацию о результате выполнения задачи, переданную от самодвижущегося робота 100, и информацию о состоянии устройства 200 передачи сигналов, переданную от него, которая включает в себя информацию заряда батареи устройства 200 передачи сигналов, информацию, указывающую температуру, влажность и состояние утечки газа в области, где находится устройство 200 передачи сигналов, информацию, указывающую, прошел ли самодвижущийся робот 100 через заданную область, и идентификационную информацию. Такие информационные сигналы, отображаемые пользователю, могут включать в себя графические данные, включающие в себя, например, символы или олицетворения. Конфигурация блока 310 ввода и блока 320 отображения известна из уровня техники и поэтому детально не описывается.
Второй беспроводный коммуникационный блок 330 представляет собой коммуникационный модем того же типа, что и беспроводный коммуникационный модуль 180 самодвижущегося робота 100. Второй беспроводный коммуникационный блок 330 передает операционную команду, принятую от пользователя через блок 310 ввода, на самодвижущийся робот 100. Второй беспроводный коммуникационный блок 330 также принимает и выводит на контроллер 350 операционного блока сигнал подтверждения приема операционной команды или информацию о результате выполнения задачи, переданную от самодвижущегося робота 100, или информацию о состоянии устройства 200 передачи сигналов, переданную от него, которая включает в себя информацию заряда батареи устройства 200 передачи сигналов, информацию, указывающую температуру, влажность и состояние утечки газа в области, где находится устройство 200 передачи сигналов, информацию, указывающую, прошел ли самодвижущийся робот 100 через заданную область, и идентификационную информацию. Второй беспроводный коммуникационный блок 330 принимает информацию о доступности доступного внешнего устройства, переданную от блока 177 сбора информации о доступности внешних устройств самодвижущегося робота 100, и передает принятую информацию о доступности контроллеру 350 операционного блока.
Например, память 340 может быть реализована как энергонезависимая память, такая как электрически перепрограммируемое ПЗУ или флэш-память. Память 340 сохраняет информацию о доступности доступных внешних устройств, переданную от блока 177 сбора информации о доступности внешних устройств самодвижущегося робота 100 через второй беспроводный коммуникационный блок 330. Доступ к информации о доступности внешнего устройства контролируется контроллером 350 операционного блока.
Например, контроллер 350 операционного блока может быть реализован как интегральная схема, такая как микроконтроллер. Контроллер 350 операционного блока включает в себя передатчик 351 операционных команд, блок 352 вывода информации о состоянии, блок 353 регистрации идентификационной информации о доступности внешнего устройства и контролер 354 внешнего устройства. Передатчик 351 операционных команд обеспечивает передачу операционной команды, принятой с блока 310 ввода, на беспроводный коммуникационный модуль 180 самодвижущегося робота 100 через второй беспроводный коммуникационный блок 330. Передатчик 351 операционных команд принимает информацию, указывающую, была или нет принята операционная команда, и информацию о результате выполнения задачи, соответствующей операционной команде, переданной от процессора 174 команд самодвижущегося робота 100, и отображает принятую информацию на блоке 320 отображения. Блок 352 вывода информации о состоянии генерирует информацию отображения, соответствующую информации о состоянии устройства 200 передачи сигналов, переданную от самодвижущегося робота 100, и выводит сформированную информацию отображения на блок 320 отображения. Блок 353 регистрации идентификационной информации о доступности внешнего устройства принимает и сохраняет информацию о доступности внешнего устройства, включая идентификационную информацию внешнего устройства, обеспечиваемую самодвижущимся роботом 100. Контролер 354 внешнего устройства принимает операционную команду для ввода пользователем данных внешнего устройства и генерирует и передает сигнал управления внешним устройством, включающий в себя идентификационную информацию внешнего устройства, на самодвижущийся робот 100.
Более конкретно, передатчик 351 операционных команд принимает пользовательскую команду с блока 310 ввода и преобразует пользовательскую команду в соответствующий командный код. Передатчик 351 операционных команд генерирует операционную команду, включающую в себя операционный код и идентификационную информацию самодвижущегося робота 100, на который должна передаваться команда, и передает генерированную операционную команду на самодвижущийся робот 100 через второй беспроводный коммуникационный блок 330. Передатчик 351 операционных команд принимает информацию, указывающую, была или нет принята операционная команда, и информацию о результате выполнения задачи, соответствующей операционной команде, от процессора 174 команд самодвижущегося робота 100 через второй беспроводный коммуникационный блок 330, и отображает принятую информацию на блоке 320 отображения. Например, информация о результате выполнения команды может включать в себя операционную информацию робота-уборщика 100, указывающую, что робот-уборщик 100 выполнил задачу, и информацию ошибки, указывающую, что робот-уборщик 100 не выполнил задачу.
Устройство 352 вывода информации о состоянии генерирует информацию отображения, соответствующую информации о состоянии устройства 200 передачи сигналов, переданной от самодвижущегося робота 100, которая включает в себя информацию заряда батареи устройства 200 передачи сигналов, информацию, указывающую температуру, влажность и состояние утечки газа в области, где находится устройство 200 передачи сигналов, информацию, указывающую, прошел ли самодвижущийся робот 100 через заданную область, и идентификационную информацию, и выводит информацию отображения на блок 320 отображения. Например, информация о состоянии, выводимая с блока 352 вывода информации о состоянии на блок 320 отображения, может включать в себя графические данные, например символы, олицетворения, изображения.
Блок 353 регистрации информации о доступности внешних устройств принимает информацию о доступности внешних устройств, включая идентификационную информацию внешних устройств, собранную блоком 177 сбора информации о доступности внешних устройств самодвижущегося робота 100, и сохраняет принятую информацию о доступности внешних устройств в памяти 340. Если пользователь вводит команду поиска внешнего устройства через беспроводный операционный блок 300, то беспроводный операционный блок 300 выводит команду поиска внешнего устройства на самодвижущийся робот 100.
Блок 177 сбора информации о доступности внешних устройств самодвижущегося робота 100 передает сигнал запроса информации о доступности внешних устройств в ответ на запрос информации о доступности, переданный от беспроводного операционного блока 300. Блок 177 сбора информации о доступности внешних устройств принимает информацию о доступности внешних устройств, включая идентификационную информацию доступного внешнего устройства, переданную внешним устройством, которое может быть доступным для самодвижущегося робота 100, посредством беспроводной передачи данных, и передает принятую информацию о доступности на беспроводный операционный блок 300 через беспроводный коммуникационный модуль 180.
Без сигнала запроса от беспроводного операционного блока 300 информация о доступности внешнего устройства может также передаваться на блок 177 сбора информации о доступности внешних устройств самодвижущегося робота 100, когда на внешнее устройство подается питание. Когда на внешнее устройство подается питание, блок 177 сбора информации о доступности внешних устройств самодвижущегося робота 100 принимает информацию о доступности внешних устройств, включая идентификационную информацию внешнего устройства, и передает информацию о доступности на блок 353 регистрации информации о доступности беспроводного операционного блока 300. Блок 353 регистрации информации о доступности принимает и сохраняет информацию о доступности в памяти 340.
После регистрации и сохранения в памяти 340 информация о доступности может быть использована постоянно. Если добавляется внешнее устройство, то можно контролировать как самодвижущийся робот 100, так и внешнее устройство с помощью единого беспроводного операционного блока 300, не требуя отдельного дистанционного контроллера.
Контроллер 354 внешних устройств передает управляющую команду активизации внешнего устройства, введенную пользователем, через блок 310 ввода, в процессор 178 управления внешними устройствами, например команду включения/выключения или команду управления температурой кондиционера воздуха, то контроллер 354 внешних устройств передает управляющий сигнал, включающий в себя идентификационную информацию кондиционера воздуха и командный код, соответствующий операционной команде кондиционера воздуха, на процессор 178 управления внешними устройствами самодвижущегося робота 100.
Процессор 178 управления внешними устройствами самодвижущегося робота 100 принимает сигнал управления внешним устройством, включающий в себя идентификационную информацию внешнего устройства, переданный от контроллера 354 внешних устройств беспроводного операционного блока 300, и выводит управляющий сигнал на внешнее устройство, соответствующее идентификационной информации. Более конкретно, если внешнее устройство принимает управляющий сигнал, например команду включения/выключения или команду управления температурой кондиционера воздуха, то процессор 178 управления внешними устройствами выводит принятый управляющий сигнал на кондиционер воздуха, соответствующий идентификационной информации, включенной в управляющий сигнал.
В соответствии с аспектом изобретения, самодвижущийся робот 100, устройство 200 передачи сигналов и беспроводный операционный блок 300 в домашней сетевой системе, соответствующей настоящему изобретению, работают в соответствии с коммуникационным протоколом Zigbee. Самодвижущийся робот 100 и множество внешних устройств также осуществляют связь в соответствии с коммуникационным протоколом Zigbee. Протокол Zigbee - это стандартные технические требования для домашних сетей автоматизации и передачи данных, отличающиеся низким потреблением мощности питания, низкой стоимостью и низкой скоростью передачи данных.
Согласно протоколу Zigbee, данные передаются со скоростью 20-250 кбит/с в пределах дальности 30 м, и обеспечивается соединение до 255 устройств в единую беспроводную сеть. Поскольку протокол Zigbee может быть реализован в малогабаритном, маломощном и экономичном модуле, он является весьма привлекательным средством в качестве базовой технологии для повсеместного применения в домашних сетях.
Поскольку коммуникационные модули протокола Zigbee имеют функцию маршрутизатора, то в отличие от обычных дистанционных пультов управления, которые используют инфракрасную или радиочастотную передачу данных, самодвижущийся робот 100, устройство 200 передачи сигналов и беспроводный операционный блок 300, имеющие коммуникационные модули протокола Zigbee, могут реализовать специальную сеть, вместе с различными внешними устройствами, имеющими коммуникационные модули протокола Zigbee.
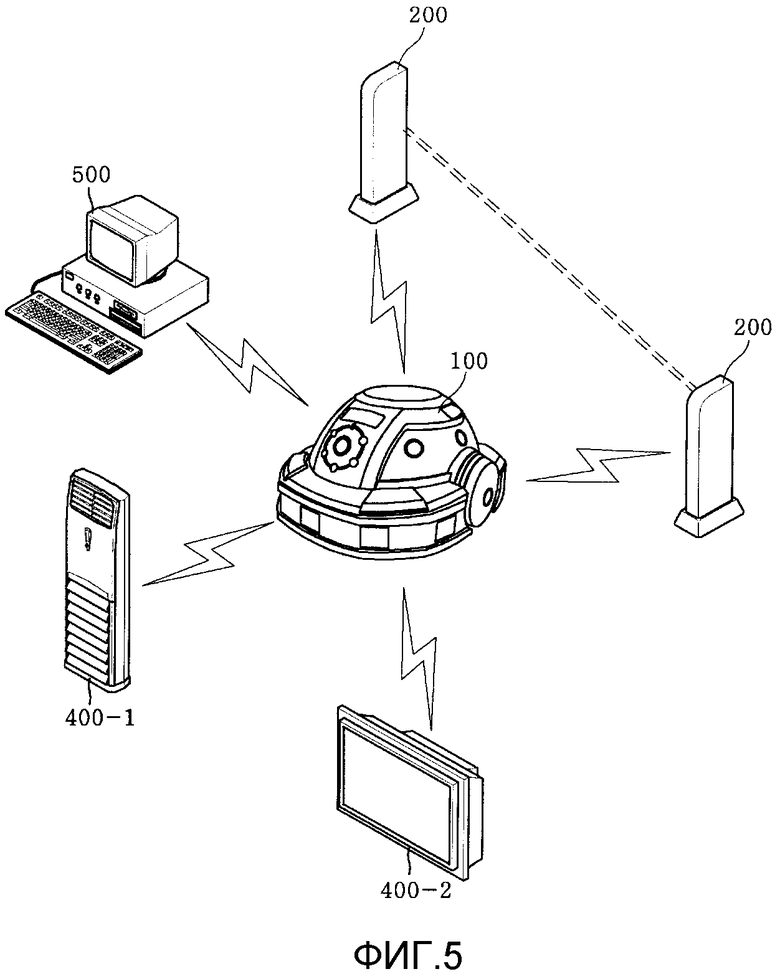
На фиг.5 схематично представлена домашняя сетевая система, использующая самодвижущийся робот, согласно другому варианту осуществления настоящего изобретения. Как показано на фиг.5, домашняя сетевая система содержит самодвижущийся робот 100, множество устройств 200 передачи сигналов и главное устройство 500. Самодвижущийся робот 100 принимает переданную беспроводным способом операционную команду, передает информацию, указывающую, принята или нет операционная команда, и выполняет задачу в соответствии с принятой операционной командой. Самодвижущийся робот 100 также передает возбуждающий сигнал в пределах конкретного диапазона и выводит управляющий сигнал на внешнее устройство, к которому может иметь доступ самодвижущийся робот 100. Каждое из множества устройств передачи сигналов обнаруживает возбуждающий сигнал, переданный от самодвижущегося робота 100, и активизируется в соответствии с возбуждающим сигналом. Если устройство передачи сигнала активизировано, то устройство передачи сигнала передает свою информацию о состоянии, включая идентификационную информацию устройства передачи сигнала, на самодвижущийся робот 100 и передает сигнал изменения направления для самодвижущегося робота 100 в конкретном направлении. Главное устройство 500 связано с пользовательским терминалом, находящимся у удаленного пользователя, через коммутируемую телефонную сеть общего доступа (PSTN). Главное устройство 500 принимает операционную команду, введенную с пользовательского терминала, и передает операционную команду на самодвижущийся робот 100. Главное устройство 500 также передает информацию, указывающую принята или нет операционная команда, и/или информацию о состоянии устройства 200 передачи сигналов, которые были переданы от самодвижущегося робота 100, на пользовательский терминал через сеть PSTN.
Самодвижущийся робот 100 выполняет задачу при автоматическом перемещении в пределах конкретной области в соответствии с установленной программой. Типовой коммерчески доступный пример самодвижущегося робота 100 представляет собой робот-уборщик, который всасывает пыль или иные инородные частицы при свободном перемещении в пределах предварительно заданной области.
Самодвижущийся робот 100, согласно варианту осуществления по фиг.5, содержит беспроводный коммуникационный модуль 180, детектор 190 сигналов, блок 130 перемещения и микропроцессор 170, как показано на фиг.2. Беспроводный коммуникационный модуль 180 передает возбуждающий сигнал для устройства 200 передачи сигналов в пределах конкретного диапазона и передает и принимает данные к/от главного устройства 500 и/или устройства 200 передачи сигналов, которое активизируется возбуждающим сигналом. Детектор 190 сигналов обнаруживает сигнал изменения направления, переданный устройством 200 передачи сигналов. Блок 130 перемещения обеспечивает возможность перемещения робота 100. Микропроцессор 170 управляет всей работой самодвижущегося робота 100. Микропроцессор 170 содержит контроллер 171 перемещения, процессор 172 изменения направления, блок 173 выделения кода команды, процессор 174 команд, передатчик 175 сигнала подтверждения приема, передатчик 176 информации о состоянии, блок 177 сбора информации о доступности внешних устройств и процессор 178 управления внешними устройствами. Контроллер 171 перемещения управляет работой блока 130 перемещения в соответствии и с управляющим сигналом. Процессор 172 изменения направления выводит управляющий сигнал на контроллер 171 перемещения для изменения направления перемещения самодвижущегося робота 100 в соответствии с сигналом изменения направления, выведенного с детектора 190 сигналов. Блок 173 выделения кода команды принимает и анализирует операционную команду, переданную от главного устройства 500, и выделяет командный код из операционной команды. Процессор 174 команд активизирует самодвижущийся робот 100 в соответствии с командным кодом, выделенным блоком 173 выделения кода команды. Передатчик 175 сигнала подтверждения приема передает информацию, указывающую, принята или нет операционная команда, на главное устройство 500 посредством беспроводного коммуникационного модуля 180. Передатчик 176 информации о состоянии принимает информацию о состоянии, переданную устройством 200 передачи сигналов, и передает информацию о состоянии на главное устройство 500 посредством беспроводного коммуникационного модуля 180. Блок 177 сбора информации о доступности внешних устройств принимает информацию о доступности внешних устройств или принимает и выдает информацию о доступности на главное устройство 500. Процессор 178 управления внешним устройством принимает сигнал управления внешним устройством, включая идентификационную информацию внешнего устройства, от главного устройства 500 и выводит принятый сигнал управления внешним устройством на внешнее устройство, соответствующее идентификационной информации.
Устройства 200 передачи сигналов установлены вдоль границы предварительно заданной области перемещения самодвижущегося робота 100, чтобы препятствовать выходу самодвижущегося робота 100 из зоны перемещения. Например, устройство 200 передачи сигналов представляет собой устройство, которое передает сигнал изменения направления для самодвижущегося робота 100, такой как инфракрасный сигнал, в определенном направлении. После обнаружения сигнала изменения направления, переданного устройством 200 передачи сигналов, самодвижущийся робот 100 изменяет свое направление перемещения таким образом, что ему не разрешается выход из зоны перемещения.
Устройство 200 передачи сигналов, соответствующе настоящему изобретению, содержит батарею 210, первый беспроводный коммуникационный блок 220, передатчик 230 сигналов, память 240 и контроллер 250 устройства передачи сигналов, как показано на фиг.3. Батарея 210 обеспечивает энергопитание для устройства 200 передачи сигналов. Первый беспроводный коммуникационный блок 220 принимает возбуждающий сигнал, переданный от самодвижущегося робота 100, и передает и принимает данные к/от самодвижущегося робота 100. Передатчик 230 сигналов передает сигнал изменения направления для самодвижущегося робота 100 в конкретном направлении. Память 240 хранит идентификационную информацию устройства 200 передачи сигналов. Контроллер 250 устройства передачи сигналов активизирует устройство 200 передачи сигналов в соответствии с возбуждающим сигналом, принятым первым беспроводным коммуникационным блоком 220. При активизации устройства 200 передачи сигналов контроллер 250 устройства передачи сигналов передает информацию о состоянии, включающую в себя идентификационную информацию устройства 200 передачи сигналов, на самодвижущийся робот 100 через первый беспроводный коммуникационный блок 220 и выводит управляющий сигнал для управления работой передатчика 230 сигналов.
Согласно дополнительному аспекту настоящего изобретения, устройство 200 передачи сигналов дополнительно содержит схему 260 определения уровня заряда батареи, определяющую уровень заряда батареи 210 с интервалами длительностью, равной конкретному периоду, и выводит сигнал запроса подзаряда на контроллер 250 устройства передачи сигналов, когда обнаруженный уровень находится на заданном уровне или ниже его.
Схема 260 определения уровня заряда батареи делит напряжение, получаемое от батареи 210, которая встроена в устройство 200 передачи сигналов для обеспечения энергопитания, в определенном отношении сопротивлений делителя, и определяет уровень заряда батареи 210 на основе уровня напряжения с делителя. Если обнаруженный уровень заряда батареи 210 соответствует уровню опорного напряжения или ниже его, то схема 260 определения уровня заряда батареи выводит сигнал запроса подзаряда на контроллер 250 устройства передачи сигналов.
Контроллер 250 устройства передачи сигналов передает информацию о состоянии, включающую в себя информацию о заряде батареи, на самодвижущийся робот 100 в соответствии с сигналом запроса подзаряда с выхода схемы 260 определения уровня заряда батареи. Самодвижущийся робот 100 передает информацию о состоянии, включающую в себя информацию о заряде батареи, переданную от устройства 200 передачи сигналов, на главное устройство 500. Главное устройство 500 выдает запрос заряда батареи с устройства 200 передачи сигналов пользователю через пользовательский терминал, такой как телефон или компьютер, связанный с главным устройством 500, через сеть, такую как PSTN или Интернет.
Согласно другому аспекту настоящего изобретения, устройство 200 передачи сигналов также содержит блок 270 сбора информации об окружающей среде, который определяет информацию об окружающей среде, включая информацию, указывающую на температуру, влажность или состояние утечки газа в области, где находится устройство 200 передачи сигналов, или информацию, указывающую на то, прошел ли самодвижущийся робот 100 через эту область.
Например, блок 270 сбора информации об окружающей среде содержит множество датчиков, таких как датчики температуры, влажности или утечки газа. Информация об окружающей среде, определенная этими датчиками, выводится на контроллер 250 устройства передачи сигналов. Контроллер 250 устройства передачи сигналов передает информацию о состоянии, включающую в себя информацию об окружающей среде, собранную блоком 270 сбора информации об окружающей среде, на самодвижущийся робот 100.
Самодвижущийся робот 100 передает информацию о состоянии, включающую в себя информацию об окружающей среде, принятую от устройства 200 передачи сигналов, на главное устройство 500. Главное устройство 500 выдает информацию о состоянии с устройства 200 передачи сигналов пользователю через пользовательский терминал, такой как телефон или компьютер, связанный с главным устройством 500, через сеть, такую как PSTN или Интернет.
Более детальное описание самодвижущегося робота 100 и устройства 200 передачи сигналов домашней сетевой системы по фиг.5 опущено, поскольку они подобны самодвижущемуся роботу 100 и устройству 200 передачи сигналов домашней сетевой системы по фиг.1, которая была описана выше со ссылками на фиг.2 и 3.
В домашней сетевой системе, использующей самодвижущийся робот, согласно варианту осуществления по фиг.5, функция беспроводного операционного блока 300 распространенна на Интернет и сеть PSTN, так что самодвижущийся робот 100 и внешние устройства, связанные с ним через сеть, могут управляться из местоположений вне помещения.
Ниже описано выполнение и функция главного устройства 500, которое является основным компонентом домашней сетевой системы согласно варианту осуществления по фиг.5.
На фиг.6 представлена блок-схема главного устройства, показанного на фиг.5. Как показано на фиг.6, главное устройство 500 домашней сетевой системы, использующей самодвижущийся робот, согласно настоящему изобретению, содержит второй беспроводный коммуникационный блок 510, память 520, блок 530 регистрации информации о доступности внешних устройств, детектор сигнала двухтонального многочастотного набора (DTMF), сетевой коммуникационный блок 550, детектор 560 команд, процессор 570 внешних команд, передатчик 580 результата. Второй беспроводный коммуникационный блок 510 передает и принимает данные к/от самодвижущегося робота 100. Память 520 сохраняет информацию о доступности внешних устройств, переданную от блока 177 сбора информации о доступности внешних устройств, переданную от блока 177 сбора информации о доступности внешних устройств самодвижущегося робота 100 через второй беспроводный коммуникационный блок 510. Блок 530 регистрации информации о доступности внешних устройств передает команду поиска внешнего устройства на самодвижущийся робот 100, принимает информацию о доступности внешнего устройства, включая идентификационную информацию внешнего устройства, которую самодвижущийся робот 100 обеспечил в ответ на команду поиска внешнего устройства, и сохраняет принятую информацию о доступности внешнего устройства в памяти 520. Детектор 540 сигнала DTMF обнаруживает сигнал DTMF, введенный с внешнего пользовательского телефона через сеть PSTN. Сетевой коммуникационный блок 550 передает и принимает данные к/от внешнего пользовательского терминала через Интернет. Детектор 560 команд обнаруживает операционную команду, введенную с внешнего пользовательского терминала через сетевой коммуникационный блок 550. Процессор 570 внешних команд преобразует сигнал DTMF, обнаруженный детектором 540 сигнала DTMF, или операционную команду, обнаруженную детектором 560 команд, в управляющий сигнал, подходящий для самодвижущегося робота 100, и передает управляющий сигнал на самодвижущийся робот 100 через второй беспроводный коммуникационный блок 510. Передатчик 580 результата передает на пользовательский телефон или на пользовательский терминал информацию, указывающую, была ли принята операционная команда, информацию о результате выполнения задачи и информацию о состоянии устройства 200 передачи сигналов, активизированного самодвижущимся роботом 100, которая была передана от беспроводного коммуникационного модуля 180 к самодвижущемуся роботу 100.
Второй беспроводный коммуникационный блок 510 представляет собой коммуникационный модем того же типа, что и беспроводный коммуникационный модуль 180 самодвижущегося робота 100. Второй беспроводный коммуникационный блок 510 передает операционную команду, выведенную от процессора 570 внешних команд, на самодвижущийся робот 100. Второй беспроводный коммуникационный блок 510 также принимает и выводит на передатчик 580 результата сигнал подтверждения приема операционной команды и информацию о результате выполнения задачи, переданную от самодвижущегося робота 100, или информацию о состоянии устройства 200 передачи сигналов, переданную от него, которая включает в себя информацию заряда батареи устройства 200 передачи сигналов, информацию, указывающую температуру, влажность и состояние утечки газа в области, где находится устройство 200 передачи сигналов, информацию, указывающую, прошел ли самодвижущийся робот 100 через заданную область, и идентификационную информацию. Второй беспроводный коммуникационный блок 510 принимает информацию о доступности доступного внешнего устройства, переданную от блока 177 сбора информации о доступности внешних устройств самодвижущегося робота 100, и передает принятую информацию о доступности в блок регистрации информации о доступности внешних устройств.
Например, память 520 может быть реализована как энергонезависимая память, такая как электрически перепрограммируемое ПЗУ или флэш-память. Память 520 сохраняет информацию о доступности внешних устройств, переданную от блока 177 сбора информации о доступности внешних устройств самодвижущегося робота 100 через второй беспроводный коммуникационный блок 510.
Блок 530 регистрации информации о доступности внешних устройств принимает информацию о доступности внешних устройств, включая идентификационную информацию внешних устройств, собранную блоком 177 сбора информации о доступности внешних устройств самодвижущегося робота 100, и сохраняет принятую информации о доступности внешних устройств в памяти 520. Если пользователь вводит команду поиска внешнего устройства через сеть PCTN или Интернет, то блок 530 регистрации информации о доступности внешних устройств выводит команду поиска внешнего устройства на самодвижущийся робот 100.
Блок 177 сбора информации о доступности внешних устройств самодвижущегося робота 100 передает сигнал запроса информации о доступности внешних устройств в ответ на запрос информации о доступности, переданный от главного устройства 500. Блок 177 сбора информации о доступности внешних устройств принимает информацию о доступности внешних устройств, включая идентификационную информацию доступного внешнего устройства, переданную внешним устройством, которое может быть доступным для самодвижущегося робота 100, посредством беспроводной передачи данных, и передает принятую информацию о доступности на блок 530 регистрации информации о доступности внешних устройств главного устройства 500 через беспроводный коммуникационный модуль 180.
Без сигнала запроса от главного устройства 500 информация о доступности внешнего устройства может также передаваться на блок 177 сбора информации о доступности внешних устройств самодвижущегося робота 100, когда на внешнее устройство подается питание. Когда на внешнее устройство подается питание, блок 177 сбора информации о доступности внешних устройств самодвижущегося робота 100 принимает информацию о доступности внешних устройств, включая идентификационную информацию внешнего устройства, и передает информацию о доступности на блок 530 регистрации информации о доступности главного устройства 500. Блок 530 регистрации информации о доступности принимает и сохраняет информацию о доступности в памяти 520.
После регистрации и сохранения в памяти 520 информация о доступности может быть использована постоянно.
Детектор 540 сигнала DTMF обнаруживает сигнал DTMF, генерированный с внешнего телефона удаленным пользователем и затем переданный через сеть PSTN, и передает обнаруженный сигнал DTMF на процессор 570 внешних команд.
Например, сетевой коммуникационный блок 550 может быть воплощен как сетевой модем, такой как Ethernet-карта, который может быть соединен с сетью Интернет. Сетевой коммуникационный блок 550 передает и принимает данные к/от внешнего пользовательского терминала по сети Интернет. Детектор 560 команд обнаруживает операционную команду, переданную от пользовательского терминала посредством сетевого коммуникационного блока 550, и выводит обнаруженную операционную команду на процессор 570 внешних команд.
Процессор 570 внешних команд преобразует сигнал DTMF, обнаруженный детектором 540 сигнала DTMF, или операционную команду, обнаруженную детектором 560 команд, в операционную команду для самодвижущегося робота 100 и передает ее к самодвижущемуся роботу 100 через второй беспроводный коммуникационный блок 510.
Передатчик 580 результата передает на пользовательский телефон или пользовательский терминал информацию, указывающую, была ли принята операционная команда, информацию о результате выполнения задачи и информацию о состоянии устройства 200 передачи сигналов, активизированного самодвижущимся роботом 100, которая была передана от беспроводного коммуникационного модуля 180 самодвижущегося робота 100.
Передатчик 580 результата принимает сигнал состояния, переданный от устройства 200 передачи сигналов, и передает принятый сигнал состояния на пользовательский телефон или пользовательский терминал для выдачи его пользователю. Здесь сигнал состояния передается в пределах конкретной дальности от робота-уборщика 100. Передатчик 580 результата главного устройства 500 может использовать систему автоматического ответа (ARS) для передачи принятой информации о состоянии на пользовательский телефон или пользовательский терминал.
Например, сигнал состояния, переданный от устройства 200 передачи сигналов, может включать в себя идентификационную информацию, информацию об уровне заряда батареи, информацию, указывающую температуру, влажность или состояние утечки газа в области, где находится устройство 200 передачи сигналов, и информацию, указывающую, прошел ли самодвижущийся робот 100 через эту область.
Информация о результате выполнения задачи, для задачи, которую выполнил робот-уборщик 100 в соответствии с операционной командой, также передается на пользовательский телефон или пользовательский терминал. Например, информация о результате выполнения задачи может включать в себя информацию о работе самодвижущегося робота 100, такую как информация, указывающая, что самодвижущийся робот 100 выполняет задачу, и информацию об ошибке, указывающую, что самодвижущийся робот 100 не смог выполнить задачу.
Главное устройство 500 и самодвижущийся робот 100 осуществляют информационный обмен следующим образом. При приеме входящего вызова главное устройство 500 обнаруживает входящий вызов и выводит ответное речевое сообщение. Если пользователь запрашивает использование функции дистанционного управления самодвижущегося робота 100, то контроллер главного устройства 500 запрашивает от пользователя информацию аутентификации пользователя, такую как пароль.
Если на основе информации аутентификации пользователя определено, что пользователь является авторизованным пользователем, то самодвижущийся робот 100 выводит руководящее сообщение дистанционного управления самодвижущегося робота 100. Пользователь нажимает кнопку на телефоне, чтобы сформировать сигнал DTMF и передать его на главное устройство 500, находящееся в помещении, с использованием сети PSTN. Главное устройство 500 анализирует операционную команду самодвижущегося робота 100 из сигнала DTMF, переданного с телефона, и передает операционную команду на самодвижущийся робот 100 с использованием коммуникационного протокола Zigbee. Самодвижущийся робот 100 выполняет операцию в соответствии с приятым управляющим сигналом.
Детектор 560 команд главного устройства 500 также обнаруживает операционную команду, переданную с пользовательского терминала по сети Интернет, и выводит обнаруженную операционную команду на процессор 570 внешних команд. Например, главное устройство 500, предусмотренное в помещении, имеет уникальную идентификационную информацию, такую как IP-адрес, и имеется возможность соединения главного устройства 500 через веб-сайт, обеспеченный провайдером услуг самодвижущегося робота 100 и главного устройства 500. Процессор 570 внешних команд принимает и преобразует операционную команду, обнаруженную детектором 560 команд, в операционную команду для самодвижущегося робота 100 и передает ее на самодвижущийся робот 100 через второй беспроводный коммуникационный блок 510.
Как очевидно из вышеприведенного описания, в домашней сетевой системе, использующей самодвижущийся робот, согласно настоящему изобретению, операционная команда, введенная посредством беспроводного операционного блока, передается через самодвижущийся робот на внешнее устройство, к которому самодвижущийся робот может получить доступ через беспроводную сеть, так что ряд внешних устройств может управляться с использованием единственного беспроводного операционного блока, который может обеспечиваться вместе с самодвижущимся роботом, без установления отдельной сети.
Дополнительно, посредством главного устройства пользователь может управлять самодвижущимся роботом в помещении из местоположений вне помещения, с использованием пользовательского телефона, такого как стационарный телефон или мобильный телефон (или мобильный коммуникационный терминал), или с использованием пользовательского терминала, соединенного с сетью, такой как Интернет, и может также управлять работой внешних устройств, к которым самодвижущийся робот может получить доступ через беспроводную сеть, без установления отдельной сети.
Хотя в иллюстративных целях раскрыты предпочтительные варианты осуществления настоящего изобретения, специалистам в данной области техники должно быть понятно, что возможны различные модификации, дополнения и замены без отклонения от объема и сущности настоящего изобретения, как раскрыто в формуле изобретения.
Изобретение относится к самодвижущемуся роботу и технологии беспроводного управления самодвижущимся роботом. Домашняя сетевая система содержит внешнее устройство, самодвижущийся робот для выполнения задачи, беспроводный операционный блок для беспроводной передачи операционной команды. Самодвижущийся робот принимает операционную команду, переданную от беспроводного операционного блока, передает информацию, указывающую принята ли команда, на операционный блок, исполняет задачу, соответствующую команде, и выводит управляющий сигнал на доступное бытовое электронное устройство. Каждое устройство передачи сигналов активизируется в соответствии с возбуждающим сигналом, передаваемым в пределах конкретной дальности от робота, передает информацию о своем состоянии на робот. Операционный блок отображает информацию приема команды и/или информацию о состоянии устройства передачи сигналов, передаваемую от самодвижущегося робота, и выводит управляющий сигнал на доступное бытовое электронное устройство посредством робота. Технический результат заключается в повышении качества управления самодвижущимся роботом. 2 н. и 18 з.п. ф-лы, 6 ил.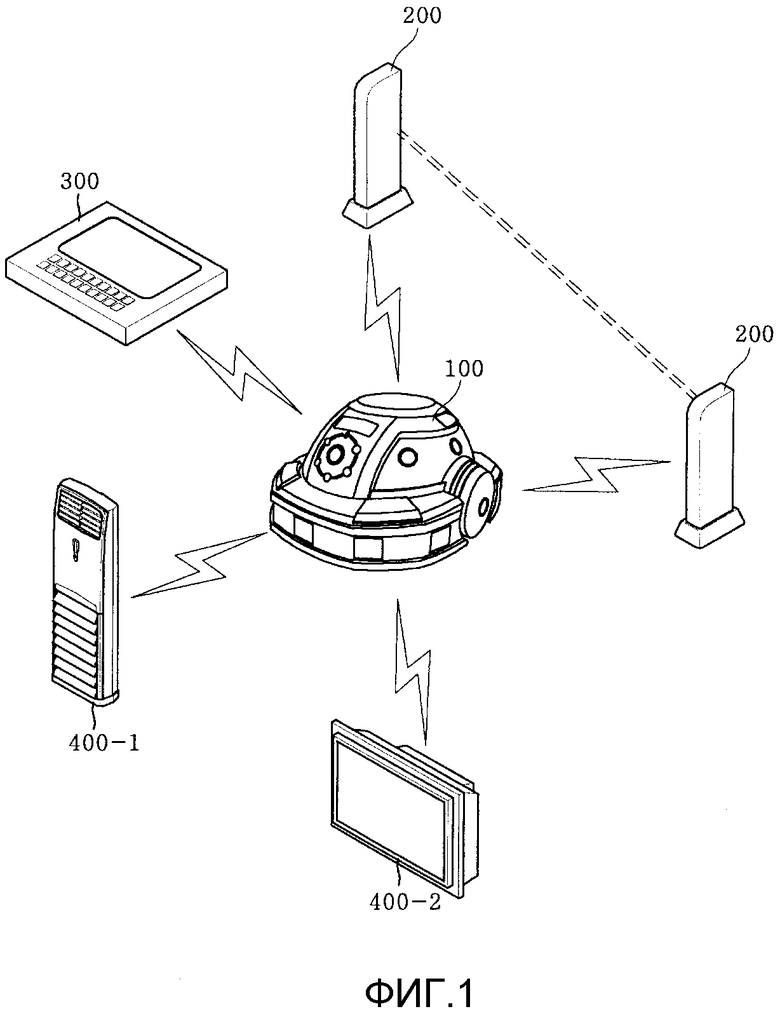
контроллер устройства передачи сигналов для активизации устройства передачи сигналов в соответствии с возбуждающим сигналом, передачи информации о состоянии, включающей в себя идентификационную информацию устройства передачи сигналов, на самодвижущийся робот, когда устройство передачи сигналов активизировано, и управления всеми операциями устройства передачи сигналов.
причем контроллер устройства передачи сигналов передает информацию о состоянии, включающую в себя информацию о заряде батареи, на самодвижущийся робот в соответствии с сигналом запроса подзаряда, выведенным из схемы определения уровня заряда батареи.
причем контроллер устройства передачи сигналов передает информацию о состоянии, включающую в себя информацию, собранную блоком сбора информации об окружающей среде, на самодвижущийся робот.
причем контроллер устройства передачи сигналов передает информацию о состоянии, включающую в себя информацию, собранную блоком сбора информации об окружающей среде, на самодвижущийся робот.
второй беспроводный коммуникационный блок для передачи и приема данных к/от самодвижущегося робота посредством беспроводной передачи,
блок регистрации информации о доступности внешних устройств для передачи команды поиска внешнего устройства на самодвижущийся робот и приема и сохранения информации о доступности внешних устройств, обеспеченной самодвижущимся роботом,
детектор сигнала двухтонального многочастотного набора (DTMF) для обнаружения сигнала DTMF, введенного с внешнего пользовательского телефона через коммутируемую телефонную сеть общего пользования (PSTN),
сетевой коммуникационный блок для передачи и приема данных к/от внешнего пользовательского терминала через Интернет и
детектор команд для детектирования операционной команды, введенной с внешнего пользовательского терминала через сетевой коммуникационный блок.
| СИСТЕМА С ЧИСТЯЩИМ РОБОТОМ, ВЫПОЛНЕННАЯ С ИСПОЛЬЗОВАНИЕМ МОБИЛЬНОЙ СЕТИ СВЯЗИ | 2001 |
|
RU2212995C2 |
| US 5534762 A, 09.07.1996 | |||
| Устройство для кантования крупногабаритных строительных изделий | 1974 |
|
SU490736A1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369454C1 |

