Область изобретения
Настоящее изобретение относится к системе самоходного робота и, в частности, к системе самоходного робота, которая может определить область перемещения с помощью информации, напечатанной на полу, и передвигаться в области при слежении за напечатанной информацией.
Уровень техники
Роботы разрабатываются для промышленных целей и используются как часть заводской автоматики. Роботы также используются вместо людей для сбора информации в экстремальной окружающей среде, в которую люди не имеют доступа. Технологии с роботами быстро развились, когда применялись к наиболее передовой индустрии космических разработок. Недавно разработаны даже дружественные к человеку домашние роботы. Типичным примером дружественного к человеку домашнего робота является самоходный робот-уборщик.
На фиг.1 представлен внешний вид обычного робота-уборщика.
Как показано на фиг.1, на передней и задней частях кожуха 20 корпуса обычного робота-уборщика предусмотрены первые блоки 30 датчиков, которые обнаруживают препятствия, посылая ультразвуковые волны и принимая ультразвуковые волны, отразившиеся от препятствий. По две контактных планки 31а предусмотрены на каждой из передней и задней частей кожуха 20 корпуса робота под первыми блоками 30 датчиков. Передающие элементы 31b, которые связаны с контактными планками 31а, проходят внутрь кожуха 20. Контактные планки 31а изогнуты вдоль наружной цилиндрической поверхности кожуха 20. Контактные планки 31а также называются «контактными датчиками», поскольку они воспринимают препятствия, с которыми непосредственно соприкасаются.
На нижних левой и правой частях кожуха 20 корпуса обычного робота-уборщика предусмотрены ведущие колеса 40, чтобы робот-уборщик мог свободно передвигаться. Автоматическое перемещение робота-уборщика достигается посредством сигнала дистанционного управления, который передается от дистанционного контроллера 50, принимается удаленным приемником 60 управления на кожухе 20 и передается на контроллер, который управляет работой приводов для приведения в движение колес 40.
Для ограничения автоматического перемещения обычного робота-уборщика, выполненного, как описано выше, используются способ, использующий магнитную ленту, и способ, использующий отдельный передатчик инфракрасного луча.
Первый из этих способов ограничивает перемещение корпуса робота из-за прикрепления магнитной ленты к полу и прикрепления датчика на эффекте Холла к корпусу робота-уборщика. Второй из этих способов ограничивает перемещение корпуса робота из-за того, что используется передатчик инфракрасного луча, и невозможно осуществить перемещение корпуса робота в направлении, противоположном направлению инфракрасного луча.
В первом способе должна использоваться магнитная лента, что увеличивает стоимость системы робота-уборщика. Имеется также много ограничений по установке магнитной ленты, поскольку магнитная лента влияет на электрические домашние приборы, электронные карты и т.п.
Второй способ экономически неэффективен, потому что он требует дополнительной покупки передатчика инфракрасного луча, и необходимо также периодически заменять аккумуляторы в передатчике инфракрасного луча.
Сущность изобретения
Технической задачей настоящего изобретения является создание системы самоходного робота, которая позволяет пользователю легко определить область перемещения с помощью дистанционного контроллера без использования отдельного оборудования, такого как передатчик инфракрасного луча, и не вызывает неудобства для пользователя, поскольку робот может передвигаться в заданной области.
Другой задачей настоящего изобретения является создание системы самоходного робота, в которой получается и передается информация о координатах, напечатанная на полу, которую можно использовать как дистанционный контроллер, а робот перемещается в определенной области, переданной от этого устройства.
Еще одной задачей настоящего изобретения является создание системы самоходного робота, в которой область уборки задается с помощью портативного устройства, имеющего функцию связи в локальной области, а робот очищает область уборки при перемещении в этой области.
В соответствии с одним объектом настоящего изобретения поставленная задача решена путем создания системы самоходного робота, которая содержит считыватель напечатанной информации для считывания информации о координатах, напечатанной на полу, блок для выделения информации о координатах области уборки из принятого беспроводным образом дистанционного сигнала управления, блок установки начальной точки перемещения, предназначенный для нахождения соседнего элемента информации о координатах среди множества элементов информации о координатах, включенных в выделенную информацию о координатах области перемещения, и для установки найденного элемента координат в качестве начальной точки перемещения, и блок слежения за информацией о координатах, предназначенный для управления работой двигателя так, что робот перемещается к начальной точке и перемещается в области уборки при отслеживании координат в области перемещения.
Поскольку робот находит и перемещается к элементу информации о координатах вблизи своего текущего положения среди множества элементов информации о координатах, включенных в информацию о координатах области перемещения, переданную из дистанционного контроллера, и перемещается в области уборки при отслеживании элементов информации о координатах, имеющихся в области уборки, можно удобно ограничить перемещение робота без необходимости использования отдельного оборудования и без неудобств для пользователя.
В соответствии с другим объектом настоящего изобретения система самоходного робота содержит блок выделения напольной информации о координатах, предназначенный для выделения информации о координатах (здесь и далее именуемой полной информацией о координатах (n×m)), напечатанной по вертикали и по горизонтали на полу, из информации о координатах, считанной посредством считывателя напечатанной информации, и передатчик напольной информации о координатах, обеспечивающий передачу выделенной полной информации о координатах к дистанционному контроллеру через блок беспроводной связи.
Поскольку полная информация о координатах, включенная в полное число элементов информации о координатах, напечатанных по вертикали и по горизонтали на полу, может передаваться к дистанционному контроллеру, этот дистанционный контроллер может сохранять полную информацию о координатах в памяти и использовать ее при установке области уборки, так что можно соответственно приспособиться к таким ситуациям, как замена пола.
Кроме того, поскольку полную информацию о координатах можно передавать по беспроводной связи к портативному устройству, способному осуществлять связь с корпусом робота, портативное устройство можно использовать в качестве дистанционного контроллера, способного устанавливать область уборки, так что можно управлять перемещением корпуса робота обычным образом, несмотря на потерю или отказ дистанционного контроллера.
Краткое описание чертежей
Признаки и преимущества настоящего изобретения в дальнейшем поясняются нижеследующим подробным описанием со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает обычную систему самоходного робота;
фиг.2 - блок-схему самоходного робота, согласно изобретению;
фиг.3 - позиции штрих-кодов, отображенных на дисплейном блоке дистанционного контроллера 100, показанного на фиг.2, согласно изобретению;
фиг.4 - позиции штрих-кодов, реально напечатанных на полу, согласно изобретению;
фиг.5 - принцип считывания штрих-кода, напечатанного на полу, системой самоходного робота, согласно изобретению.
Описание предпочтительных вариантов осуществления изобретения
Предпочтительные варианты осуществления настоящего изобретения будут описаны подробно со ссылками на сопровождающие чертежи.
На фиг.2 представлена блок-схема системы самоходного робота (конкретнее - системы робота-уборщика) согласно варианту осуществления настоящего изобретения.
Как показано на фиг.2, система робота-уборщика согласно варианту осуществления настоящего изобретения содержит корпус 200 робота-уборщика и дистанционный контроллер 100, который дистанционно управляет перемещением корпуса 200 робота-уборщика.
Дистанционный контроллер 100 может также быть частью корпуса 200 робота-уборщика или может быть портативным/мобильным терминалом связи, таким как мобильный телефон или ПЦА (PDA), имеющий модуль связи в локальной области, такой как модуль Bluetooth. В некоторых случаях дистанционный контроллер 100 может быть домашним сетевым устройством, таким как цифровой телевизор или центральное переговорное устройство, которое имеет беспроводный модуль ЛС (LAN) или модуль Zigbee и тем самым может осуществлять связь с корпусом 200 робота.
Как показано на фиг.2, дистанционный контроллер 100, в основном, включает в себя модуль 125 беспроводной связи, память 130, дисплейный блок, блок ввода данных и контроллер 115. Модуль 125 беспроводной связи осуществляет связь с корпусом 200 робота. Память 130 хранит информацию о координатах, напечатанных на полу. Дисплейный блок отображает эту информацию. Блок ввода данных позволяет пользователю устанавливать область перемещения. Контроллер 115 управляет этими элементами, чтобы хранить и отображать информацию о координатах и передавать информацию о координатах области перемещения, выбранной пользователем.
Например, модуль 125 беспроводной связи может быть реализован как инфракрасный передатчик, беспроводный модуль связи местной области, такой как модуль Bluetooth, модуль беспроводной локальной сети (LAN) или модуль Zigbee и т.п., в зависимости от системы. Информация о координатах, хранящаяся в памяти 130, представляет собой информацию об элементах информации о координатах, напечатанных по вертикали и по горизонтали (т.е. в матричном виде) на полу. Конкретнее, информация о координатах является полной напольной информацией о координатах (n×m), которая представляет собой значение, введенное или измененное менеджером и хранящееся в памяти 130, или же значение, переданное из корпуса 200 робота и хранящееся в памяти 130. На фиг.2 дисплейный блок для отображения информации о координатах конкретизирован для примера сенсорным экраном 105, а блок ввода данных для установки области перемещения конкретизирован блоком 120 клавишного ввода, включающим в себя несколько кнопок вместе с сенсорным экраном 105. Блок 110 обнаружения положения ввода обнаруживает уточненное положение области перемещения, введенное на сенсорном экране 105. Под управлением контроллера 115 обнаруженная посредством блока 110 обнаружения положения ввода информация уточненного положения области перемещения передается в качестве информации о координатах. Под управлением контроллера 115 полная напольная информация о координатах (n×m), переданная из корпуса 200 робота, сохраняется в памяти 130 для обращения к ней.
Ниже представлено описание корпуса 200 робота-уборщика, перемещение которого управляется дистанционным контроллером 100.
Как и корпус обычного робота, корпус 200 самоходного робота согласно варианту осуществления настоящего изобретения содержит сенсорный блок 210, имеющий множество сенсоров для восприятия преград и обрывов. Для перемещения робота корпус 200 самоходного робота содержит также блок 220 привода двигателей левого-правого колеса и определители 230 числа оборотов, например, счетчики оборотов. Блок 220 привода двигателей левого-правого колеса управляет двигателями М левого и правого колес согласно сигналам управления приводом, принятым от контроллера 240 корпуса, описанного ниже. Определители 230 числа оборотов соединены, соответственно, с левым и правым колесами, чтобы определять число оборотов левого и правого колес и затем подавать эти числа оборотов обратно к контроллеру 240 корпуса.
Корпус 200 робота-уборщика согласно варианту осуществления настоящего изобретения содержит также блок 250 беспроводной связи с дистанционным контроллером 100. Как описано выше для дистанционного контроллера 100, этот модуль 250 беспроводной связи может быть реализован как инфракрасный передатчик, беспроводный модуль связи местной области, такой как модуль Bluetooth, модуль беспроводной локальной сети (LAN) или модуль Zigbee либо тому подобное. Разумеется, модуль 250 беспроводной связи может также включать в себя множество модулей связи, отвечающих различным протоколам связи, чтобы осуществлять связь со множеством устройств.
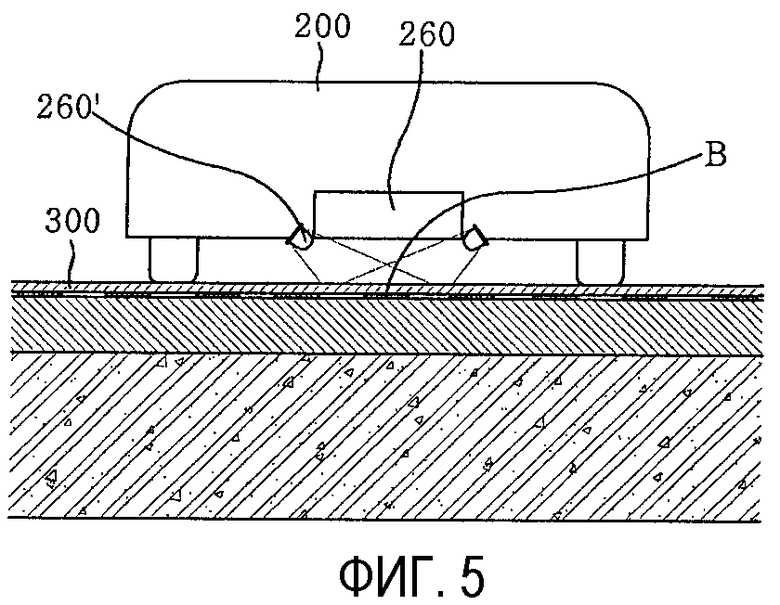
Корпус 200 робота-уборщика содержит также считыватель 260 напечатанной информации. Этот считыватель 260 напечатанной информации установлен в нижней части корпуса 200 (фиг.5), чтобы считывать элементы информации о координатах, напечатанные бесцветной или секретной краской, которая излучает цвет, когда принимает свет от светоизлучающего элемента 260′. Каждый из элементов информации о координатах представлен двумерным штрих-кодом В (фиг.4). Разумеется, информация о координатах может быть напечатана в других форматах, таких как обычные штрих-коды.
Контроллер 240 управляет работой робота на основании данных управляющей программы, хранящихся в памяти 270. Например, контроллер 240 управляет роботом на основании множества программных модулей или блоков 241-245 (фиг.2).
Конкретно блок 241 выделения информации о координатах области перемещения выделяет информацию о координатах области перемещения из сигнала дистанционного управления, принятого через модуль 250 беспроводной связи.
Блок 242 установки начальной точки находит положение соседнего элемента информации среди множества элементов информации о координатах, включенных в информацию о координатах области перемещения, выделенную блоком 251 выделения информации, и устанавливает найденную соседнюю координату в качестве начальной точки.
Блок 243 слежения управляет работой двигателей М левого и правого колес, чтобы корпус 200 двигался к начальной точке, установленной блоком установки начальной точки, и чтобы корпус 200 перемещался в области перемещения при отслеживании всех элементов координат, имеющихся в области перемещения.
Система робота-уборщика может также содержать блок 244 выделения напольной информации о координатах и блок 245 передачи напольной информации о координатах в дополнение к блоку 241 выделения информации о координатах в области перемещения, блоку 242 установки начальной точки перемещения и блоку 243 выделения информации о координатах. Блок 244 выделения напольной информации о координатах выделяет полную информацию о координатах (n×m) элементов информации о координатах, которые напечатаны по вертикали и по горизонтали на полу, из напольной информации о координатах, считанной считывателем 260 напечатанной информации. Блок 245 передачи напольной информации о координатах передает выделенную полную напольную информацию о координатах к дистанционному контроллеру 100 через модуль 250 беспроводной связи.
Робот, который просто принимает координаты области перемещения и перемещается в этой области при отслеживании координат области перемещения, является системой самоходного робота согласно первому варианту осуществления настоящего изобретения.
Система робота, которая включает в себя дистанционный контроллер 100, имеющий память, где сохранена полная информация о координатах (n×m), напечатанная на полу, и корпус робота, который управляется этим дистанционным контроллером, являются системой самоходного робота согласно второму варианту осуществления настоящего изобретения.
Система робота, в которой корпус робота получает полную информацию о координатах (n×m), напечатанную на полу, и передает ее к дистанционному контроллеру 100, является системой самоходного робота согласно третьему варианту осуществления настоящего изобретения.
Ниже подробно описана операция системы самоходного робота согласно вариантам осуществления изобретения.
Сначала будет дано описание того, как корпус 200 робота-уборщика получает и передает к дистанционному контроллеру 100 полную информацию о координатах (n×m) элементов информации о координатах, которые напечатаны по вертикали и по горизонтали на полу.
Пользователь помещает корпус 200 робота-уборщика на пол 300 (фиг.4) и использует дистанционный контроллер 100 для перемещения корпуса 200 робота. Предполагается, что двумерные штрих-коды В 6×4 напечатаны по вертикали и по горизонтали (т.е. в матрице 6×4) на полу 300. Эти двумерные штрих-коды содержат информацию их собственных положений, т.е. первые координаты (1, 1), вторые координаты (1, 2), ... и 24-е координаты (4, 6), а также полную информацию о координатах (n×m) штрих-кодов, напечатанную на полу. То есть каждый элемент информации (т.е. каждый штрих-код) содержит информацию о координатах своего положения и полную информацию о координатах.
Когда корпус 200 робота перемещается на полу 300 при сделанных выше предположениях, он может считывать элементы информации о координатах (т.е. двумерный штрих-код), напечатанный на полу, посредством светоизлучающего элемента 260′ и считывателя 260 напечатанной информации, установленного на дне корпуса 200 (фиг.5). Когда светоизлучающий элемент 260′ излучает свет конкретного диапазона длин волн при подаче питания на светоизлучающий элемент 260′, двумерный штрих-код, который обработан химически так, что он вырабатывает цвет в ответ на конкретный диапазон длин волн, обнаруживается считывателем 260 напечатанной информации. Обнаруженная информация штрих-кода переносится в блок 244 выделения напольной информации о координатах. Блок 244 выделения напольной информации выделяет затем полную информацию о координатах элементов, напечатанных на полу, из обнаруженной информации штрих-кода (координат) и переносит выделенную полную информацию о координатах в передатчик 245 напольной информации о координатах. Передатчик 245 передает по линии беспроводной связи выделенную полную информацию о координатах в качестве напольной информации о координатах.
Напольная информация о координатах, переданная по линии беспроводной связи из корпуса 200 робота-уборщика, принимается модулем 125 беспроводной связи в дистанционном контроллере 100 и затем сохраняется в памяти 130 под управлением контроллера 115.
Область перемещения с помощью дистанционного контроллера 100, который принял напольную информацию о координатах от корпуса 200 робота-уборщика, или с помощью удаленного контроллера 100, имеющего память 130, в которой напольная информация о координатах сохранена изготовителем или управляющим, задается следующим образом.
Когда пользователь желает задать область перемещения, он дает команду дистанционному контроллеру 100 отобразить напольную информацию о координатах. Контроллер 115 в дистанционном контроллере 100 считывает и отображает напольную информацию о координатах, хранящуюся в памяти 130, на сенсорном экране 105, который функционирует как блок отображения. Пример информации о координатах, отображенной на сенсорном экране 105, показан на фиг.3. Если элементы напольной информации о координатах n×m отображаются на сенсорном экране 105, как показано на фиг.2, пользователь может вводить местоположения, чтобы задавать желательную область перемещения на сенсорном экране 105. Местоположения для задания области перемещения можно также ввести с помощью клавиш направления или числовых клавиш. В варианте осуществления настоящего изобретения предполагается, что область перемещения задается первым, шестым, девятнадцатым и двадцать четвертым элементами информации о координатах.
Когда пользователь вводит местоположения, чтобы задать область перемещения, блок 110 определения вводимого местоположения определяет и передает информацию заданного местоположения в области перемещения в контроллер 115. Контроллер 115 устанавливает эту информацию заданного местоположения в области перемещения в качестве информации о координатах области перемещения и передает ее в корпус 200 робота-уборщика посредством модуля 125 беспроводной связи.
Информация о координатах области перемещения, переданная по линии беспроводной связи из дистанционного контроллера 100, переносится как часть сигнала дистанционного управления в блок 241 выделения информации о координатах посредством модуля 250 беспроводной связи корпуса 200 робота. Блок 241 выделения информации о координатах выделяет информацию о координатах в области перемещения из принятого сигнала дистанционного управления и передает в блок 242 установки начальной точки. Блок 242 установки начальной точки находит элемент информации о координатах вблизи текущего положения среди множества элементов информации о координатах, включенных в выделенную информацию о координатах в области перемещения, и устанавливает найденный элемент информации о координатах в качестве начальной точки перемещения. Например, когда элементом информации о координатах, считываемым в данный момент считывателем 269 напечатанной информации, является (2, 2), а принятыми элементами информации о координатах области перемещения являются (1, 1), (1, 6), (4, 1) и (4, 6), блок 242 установки начальной точки перемещения устанавливает координаты (1, 1) в качестве координат начальной точки перемещения.
Когда начальная точка перемещения установлена, блок 243 слежения за информацией о координатах управляет работой двигателей так, что корпус 200 перемещается к этой начальной точке перемещения. Когда корпус 200 робота передвинулся в начальную точку, блок 243 слежения за информацией о координатах управляет работой двигателя так, что корпус 200 перемещается в области перемещения, установленной пользователем, при отслеживании всех элементов информации о координатах, имеющихся в установленной области перемещения.
Соответственно, корпус 200 робота-уборщика может нормально очистить область, заданную пользователем.
Варианты осуществления настоящего изобретения описаны в предположении, что дистанционный контроллер 100 и корпус 200 робота-уборщика составляют единую систему самоходного робота. Однако терминал мобильной связи или домашнее сетевое устройство, способное осуществлять беспроводную локальную связь, которое не является принадлежностью корпуса 200 робота-уборщика, также может быть установлено в качестве дистанционного контроллера 100 и объединено с корпусом 200 робота-уборщика, чтобы составить единую систему самоходного робота. Это возможно потому, что электрические бытовые приборы или устройства связи, имеющие модуль беспроводной локальной связи или терминалы мобильной связи, такие как мобильные телефоны или ПЦА (PDA), которые совместимы с различными протоколами связи, могут управлять перемещением корпуса 200 робота-уборщика согласно описанным выше принципам работы.
Как очевидно из вышеприведенного описания, система робота согласно настоящему изобретению имеет множество преимуществ. К примеру, корпус робота располагается и перемещается к элементу информации о координатах вблизи его текущего местоположения среди множества элементов информации о координатах, включенных в информацию о координатах области перемещения, переданную от дистанционного контроллера 100, и перемещается в области перемещения при отслеживании элементов информации о координатах, имеющихся в области перемещения, так что можно удобно ограничить перемещение корпуса робота без необходимости отдельного оборудования и без внесения неудобств для пользователя.
Поскольку полная информация о координатах, включающая в себя полное число элементов информации о координатах, напечатанных по вертикали и по горизонтали на полу, может передаваться к дистанционному контроллеру, последний может сохранять полную информацию о координатах в памяти и использовать ее для установки области перемещения, так что можно соответственно адаптироваться к ситуациям, таким как замена пола.
Кроме этого, поскольку полная информация о координатах может передаваться по линии беспроводной связи к портативному устройству, способному осуществлять связь с корпусом робота, это портативное устройство можно использовать в качестве дистанционного контроллера, способного устанавливать область перемещения, так что можно нормально управлять перемещением корпуса робота, несмотря на потерю или отказ дистанционного контроллера.
Хотя для иллюстративных целей раскрыты предпочтительные варианты осуществления настоящего изобретения, специалистам ясно, что возможны различные модификации вышеприведенных вариантов осуществления и иные эквивалентные варианты осуществления без отхода от объема и сущности изобретения.



Система самоходного робота, способная определить область перемещения, относится к системам бытовых роботов и содержит дистанционный контроллер и корпус самоходного робота. Дистанционный контроллер сохраняет напольную информацию о координатах, принятую по линии беспроводной связи от корпуса робота, в памяти, отображает эту информацию на блоке отображения, устанавливает ряд элементов информации о координатах, введенных пользователем, в качестве информации о координатах в области перемещения и передает информацию о координатах в области перемещения к корпусу робота. Корпус робота считывает информацию о координатах, напечатанную на половом настиле, выделяет полную информацию о координатах из считанной информации, передает по линии беспроводной связи полную информацию о координатах в качестве напольной информации о координатах к дистанционному контроллеру, считывает информацию о координатах, напечатанную на половом настиле, и перемещается при отслеживании на половом настиле информации о координатах в области перемещения, принятой по беспроводной линии связи от дистанционного контроллера. Обеспечивается возможность легкого определения области перемещения самоходного робота. 2 н. и 11 з.п. ф-лы, 5 ил.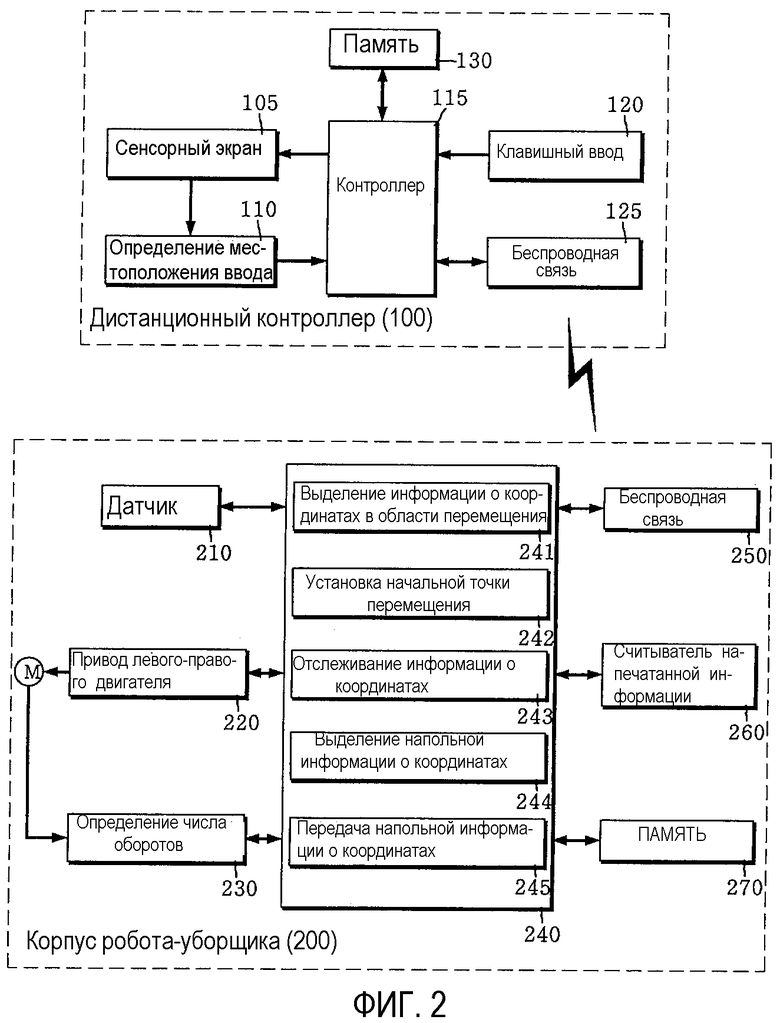
| JP 60201409, 11.10.1985 | |||
| JP 6255714, 13.09.1994 | |||
| KR 2005011566, 29.01.2005 | |||
| СПОСОБ РАСПОЗНАВАНИЯ МЕТОК ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РОБОТА-ПЫЛЕСОСА И РОБОТ-ПЫЛЕСОС, ИСПОЛЬЗУЮЩИЙ ДАННЫЙ СПОСОБ | 2003 |
|
RU2248176C1 |

