Изобретение относится к области пневматики и может быть использовано в качестве исполнительного устройства управления створками дверей автобусов и троллейбусов с защитой пассажиров от зажима и от ударов створками дверей.
Известно устройство модуля МППД-04-2-1-50-135-Б (рекламный лист «Пневматические приводы дверей троллейбусов и автобусов «Электросервис» и фирма «Камоцци») [1], включающее два пневмоцилиндра, соединенных гибкими трубопроводами с пневмораспределителем и антиблокировочным устройством, включающим в себя механическое пружинное дифференциальное реле давления, микропереключатель и электрический блок для отключения антиблокировочного устройства, при закрытых створках двери, в котором защита срабатывает при превышении разности давлений определенной величины в полостях цилиндров пневмопривода.
Близким, принятым за прототип является пневмопривод (RU 2198102 С2) [2] дверей автотранспортного средства с антиблокировочным устройством, содержащем на общей панели рабочий пневмоцилиндр с микропереключателем, пневмораспределитель и антиблокировочное устройство с микропереключателем, соединенные гибкими трубопроводами. В конструкцию антиблокировочного устройства входит золотник с канавками, пружины, шарик и микропереключатель. Функции слежения и срабатывания в данном устройстве, как и в [1], возложены на систему пружин.
Однако такие конструкции имеют ряд недостатков:
1. Реле давления сложно сделать строго дифференциальными при приемлемых габаритах и усилие все же зависит от рабочего давления.
2. Если имеется привод с двумя цилиндрами и одним пневмораспределителем, то приходится применять два реле давления (на каждый цилиндр), при этом все равно невозможно добиться, чтобы защита срабатывала при торможении только одного цилиндра. В результате срабатывание защиты происходит только при зажиме между створками двери, либо после того, как вторая створка, движущаяся свободно, полностью закрывается. Этого недостатка нет у предлагаемых систем.
3. В механических реле давления пружины работают в очень жестком режиме (при каждом закрывании и открывании) поэтому усилие срабатывания со временем уменьшается. Кроме того, вообще, износ устройства происходит быстро. Для обеспечения требуемой долговечности и надежности требуются качественные материалы, соблюдение большой точности размеров деталей, то есть в результате больших затрат на производство.
4. Реле давления не может отличить внутренней силы сопротивления от внешней помехи. Поэтому при увеличении этого внутреннего сопротивления (например, при низкой температуре или при незначительной неисправности двери, не влияющей на ее основную функцию) может быть ложное срабатывание защиты.
5. Для исключения возможности самопроизвольного открывания двери, в подобных системах, как правило, необходимы дополнительные устройства блокировки, использующие электромагнитные реле, и имеющие достаточно сложную схему, но в этом случае его конструкция еще больше усложняется, а надежность уменьшается.
Так же, принятым за прототип, является устройство датчика электронного спидометра (см. «Автомобильные датчики, реле и переключатели». Краткий справочник. - М.: ЗАО «КЖИ «За рулем», 2004. - 176 с.: ил.: табл.) [3], в принцип действия которого заложен «эффект Холла».
При вращении цилиндрического экрана его сегменты и прорези поочередно проходят между неподвижным магнитом и датчиком Холла. Когда между магнитом и датчиком Холла проходит сегмент экрана, магнитное поле перекрывается и на выходе датчика напряжение минимально. При прохождении между магнитом и датчиком Холла прорези экрана на датчик поступает максимальный магнитный поток, и на выходе напряжение становится максимальным. Следовательно, при вращении экрана со скоростью, пропорциональной скорости движения автомобиля, на выходе датчика Холла появляются импульсы напряжения, частота следования которых пропорциональна скорости автомобиля.
Основным недостатком конструкции данного устройства, относительно его применения при информировании о линейном перемещении штока пневмоцилиндра, является то, что он регистрирует только вращательное движение, которое имеет число повторностей регистрации сигнала, стремящееся к бесконечности, с помощью такого датчика сложно определять конечные положения створок двери. Кроме того, при условии его монтажа на блоке пневмопривода, для регистрации сигнала линейного перемещения потребуется дополнительная конструкция, преобразующая поступательное движение во вращательное. Из-за этого конструкция пневмопривода усложнится и снизится надежность всей системы блокировки, ввиду того, что механические части быстро изнашиваются.
Наиболее близкой системой, которая так же может быть взята за прототип, является система автоматического открытия или закрытия двери автомобиля патенты (СА 2218946, US 6009671) [4]. В системе автоматического открытия или закрытия скользящей двери трос 4, жестко закрепленный на скользящей двери, наматывается на барабан 10 для автоматического открытия или закрытия скользящей двери, а между барабаном 10 и скользящей дверью имеются натяжители 11а и 11b. Далее, на натяжителях имеются рейки 20 чувствительного элемента для определения скорости перемещения натяжителей 11а и 11b. Если скорость перемещения натяжителей 11а и 11b оказывается больше заданного значения, устанавливаемого заранее, то в случаях, когда положение скользящей двери не является полностью открытым или полностью закрытым, делается вывод, что произошло зажатие и оно должно быть устранено.
Однако данное изобретение так же имеет ряд недостатков:
1. Контроль за положением двери и за моментом зажатия какого-либо объекта возложен на два полуавтоматических устройства: датчик Холла 16, установленный на выходном валу 9а электродвигателя 9, и рейку 20 чувствительного элемента, установленную на натяжителе 11a и перемещающуюся синхронно с ним, скорость перемещения которой обнаруживается датчиком 21.
2. Данная система защиты от зажатия органически включает в себя несколько механических элементов - натяжители, подвижные шкивы, пружина натяжения, что требует тщательной регулировки при монтаже и уменьшает надежность при эксплуатации.
При зажиме трос 4 со стороны намотки натягивается, и подвижный шкив 12а перемещается вверх, преодолевая при этом сопротивление пружины растяжения 13а. Соответственно при условии поломки пружины 13а произойдет остановка (фиксирование) натяжителя 11а и рейки 20 чувствительного элемента в верхнем положении, посредством беспрепятственного воздействия на них троса 4, которая будет оцениваться системой как положение отсутствия зажатия, при открытии или закрытии, при фактическом зажатии пассажира дверью. То есть надежность системы слежения в данном случае зависит от фактора возможного выхода из строя пружины растяжения 13а подвижного шкива 12а. Если данная ситуация произойдет во время стоянки или движения автомобиля при нижнем положении натяжителя 11а и рейки 20 чувствительного элемента, то возможно, что дверь транспортного средства либо не откроется, либо не закроется, так как под действием троса 4 при отсутствии сопротивления сломавшейся пружины 13а натяжитель 11а и рейка 20 чувствительного элемента практически мгновенно отклоняться в крайнее верхнее положение и электронное управляющее устройство 8, воспринимая сигнал с чувствительного элемента 20 и датчика 21, будет делать заключение, что сразу после начала открытия, или сразу при закрытии, произошло зажатие. При условии, что дверь открыта, автомобиль не сможет продолжать движение с открытой дверью в целях безопасности, а при условии закрытой двери возникает проблема высадки и посадки пассажиров и т.д.
3. Датчик скорости (система из рейки 20 и датчики 21) учитывает и различает только факт резкого снижения скорости двери, т.е. реагирует на «отрицательное ускорение» двери. При этом нет возможности ввести ограничение величины интервала времени от момента начала замедления двери до момента необходимого реверса двигателя, если это замедление происходит постепенно. Поэтому, в случае, если в дверной проем попадает упругий элемент, имеющий свойство постепенно деформироваться под действием усилия со стороны двери, то нагрузка со стороны двери на трос 4 может оказаться недостаточной, чтобы произошло перемещение натяжителя 11а и рейки 20 со скоростью, превышающей заданное пороговое значение. При этом рейка 20 сравнительно медленно переместится в крайнее верхнее положение, из чего следует, что сигнал о зажатии не будет подан на управляющее устройство 8 и реверс двигателя 9 не будет включен, следовательно произойдет зажатие.
4. Система из рейки 20 и датчика 21 не выдает информацию о крайних положениях двери. За это отвечает другая система (выходной вал 9а электродвигателя 9, установленный на выходном валу магнит 15 с десятью полюсами и датчик Холла 16), которая определяет крайние положения двери по числу оборотов двигателя, сделанных от момента подачи соответствующих сигналов на открывание или закрывание.
Так как в качестве рабочего органа для перемещения двери используется трос 4, закрепленный в устройствах натяжения, расположенных в блоках шкивов 6а и 6б, то существует возможность ослабления его натяжения. В этом случае может произойти увеличение числа оборотов шкива 10 до полного закрытия или открытия двери, что может вызвать неправильный подсчет датчиком Холла 16 положения двери. При этом, если информация от системы слежения за положением двери о крайнем положении двери еще не прошла на устройство управления 8, а реально дверь уже закрылась, то сигнал с датчика 21 поступит, система будет воспринимать эту ситуацию как зажатие и дверь будет невозможно закрыть. Аналогичная ситуация может иметь место при открывании двери.
5. Для контроля процессов открывания и закрывания двери патентами (СА 2218946, US 6009671) [4] предусматривается две рейки 20 чувствительного элемента и два датчика 21 отдельно на закрытие двери и отдельно на открытие двери. При этом каждая пара «рейка - датчик» должна иметь свой натяжитель 11a или 11b, фиксированный шкив 18а или 18b, подвижный шкив 12а или 12b, рычаг 19, пружины растяжения 13а или 13b, что усложняет систему и делает ее менее надежной.
6. К основному недостатку следует отнести то, что используемые в данном устройстве датчики установлены не на рабочем органе перемещения двери - тросе 4, что затрудняет прямолинейно отслеживать скорость перемещения двери и ее положение, а так же сравнивать изменения скорости перемещения двери на предыдущих циклах открытия или закрытия, вызванные внутренними сопротивлениями и износом механических частей.
Технический результат изобретения заключается в повышении надежности и улучшении функциональных свойств системы определения конечного положения створок дверей и антиблокировочной системы путем отслеживания и контроля перемещения створок дверей, и обеспечивается за счет того, что:
1. Вместо цилиндрического экрана в зазоре магниточувствительного датчика свободно перемещается стальная рейка с отверстиями любой геометрической формы. Рейка закреплена на штоке пневмоцилиндра и вместе с ним совершает линейное возвратно-поступательное перемещение. Период сигнала (интервал между двумя фронтами соседних импульсов) равен интервалу времени прохода дискретного участка хода (l) штока привода управления дверью. Полный ход (L) разбит на n дискретных участков.
2. В результате полностью исключены электрические и механические контакты путем замены пневматической антиблокировочной системы, содержащей дифференциальное реле давления на электронное антиблокировочное устройство. Учитывая возможности современных электронных устройств, сигналы с датчиков можно обрабатывать по различным алгоритмам и выбирать различный критерий функции защиты (условие, при котором происходит блокировка и реверсирование движения створок двери). Датчик фиксирует время прохождения рейки на n-ом участке, передает сигнал на микроконтроллер, который сравнивает его с временем, заложенным в памяти, и в зависимости от условий срабатывания антиблокировочная система начинает свою работу по алгоритмам, которые могут быть основаны на различных принципах. Примеры возможных критериев срабатывания защиты от «зажима», заложенных в алгоритм антиблокировочного устройства, приведены ниже (п.п.2.1-2.5).
2.1 Для пневмоприводов характерно, что на рабочем участке скоростей движения штока, можно считать скорость движения штока линейно зависящей от тормозного усилия на нем. С другой стороны - усилие, действующее на шток со стороны препятствия, линейно зависит от скорости его движения. Закономерность зависимости пневматической силы от скорости штока можно записать и в следующем виде

где Fn+1(р) - «пневматическая» сила, действующая на n+1-м дискретном участке хода;
Fn(р) - «пневматическая» сила, действующая на n-м дискретном участке хода;
Fmax - величина, близкая к максимальной силе при полной остановке;
tn - интервал времени прохода n-го дискретного участка;
tn+1 - интервал времени прохода n+1-го дискретного участка.
Если на n-м участке хода внешней помехи движению нет (Fn(р) - сила внутреннего сопротивления), а на n+1-м участке она появилась, то разность Fn+1(р)-Fn(р) можно считать той силой, которая действует на препятствие со стороны штока. Разность (Fmax-Fn) можно считать величиной, близкой к максимально возможной силе воздействия со стороны штока на препятствие.
2.2 Самый простой способ, когда критерием является критическая величина интервала времени tc прохода дискретного участка n, то есть минимально допустимая скорость на участке n:
tn>tc - условие срабатывания защиты,
где tn - текущее время таймера, отслеживаемое от момента поступления очередного фронта импульса с датчика (в ожидании следующего фронта);
tc - критический (максимально допустимый) интервал времени прохода дискретного участка (l). Из формулы (1) видно, что сила, действующая на препятствие со стороны привода в момент срабатывания защиты, будет зависеть как от величины Fmax (которая определяется рабочим давлением в системе), так и от величины начальной скорости движения.
2.3 Из формулы (1) видно, что если критерием выбрать отношение скоростей vn+1/vn или интервалов времени прохода соседних дискретных участков tn/tn+1, то пневматическое усилие на препятствие в момент срабатывания защиты будет зависеть от величины этого критерия, но не будет зависеть от скорости перед началом торможения.
Если измерить интервал времени прохода 1-го дискретного участка и считать, что в начале хода движение проходит без внешней помехи, а потом сравнивать сохраненный в памяти 1-й интервал с последующими, то можно выбрать критерий следующим образом:
tn>K·t1 - условие срабатывания защиты,
где tn - текущее время таймера, отслеживаемое от момента поступления очередного фронта импульса с датчика (в ожидании следующего фронта);
t1 - интервал времени, измеренный при проходе 1-го дискретного участка;
К - критерий, который можно регулировать.
Учитывая (1) имеем

где F1(p) - «пневматическая» сила, которая преодолевает внутреннюю силу сопротивления на 1-м участке в начале хода (внешняя помеха отсутствует)

Fn(внеш) зависит только от максимальной силы, создаваемой приводами от заданного критерия К.
Такая функция защиты будет хорошо работать, если внутренняя сила сопротивления постоянна на всей длине хода штока. Если в середине или в конце хода внутреннее сопротивление значительно увеличится, то это будет воспринято как внешняя помеха и защита сработает.
2.4 Если измерять интервал времени прохода n-го дискретного участка, а потом сравнивать сохраненный в памяти n-й интервал с последующими, то можно выбрать критерий следующим образом:
tn+1>K·tn - условие срабатывания защиты,
где tn+1 - текущее время таймера, отслеживаемое от момента поступления очередного фронта импульса с датчика (в ожидании следующего фронта);
tn - интервал времени, измеренный при проходе предыдущего дискретного участка;
К - критерий, величину которого можно регулировать.
Аналогично (3):

Если на n-м участке шток двигался без внешней помехи, а на n+1-1-м участке появилась такая внешняя сила, что время его прохода превышает K·tn, то это значит, что внешнее усилие превышает допустимое и срабатывает защита. Такой режим имеется при резком торможении и наиболее вероятен в реальных условиях.
Однако такая функция защиты допускает плавный спад скорости с определенной постоянной времени, определяющей жесткость торможения:

где С=ln(K);
Vo - скорость в момент начала торможения.
В этом случае защита срабатывает, когда постоянная С превышает критическое значение, и при плавном торможении может не сработать вплоть до полной остановки и максимального усилия.
Чтобы исключить такой режим, вводится ограничение на максимально допустимое время tn+1:
tn+1>K·tn, но не более tc.
2.5 Если при движении штока сохранять в памяти все интервалы времени, за которые он проходит каждый дискретный участок хода, то на следующем цикле движения можно сравнивать каждый интервал текущего цикла с соответствующим интервалом предшествующего цикла.
Тогда условие срабатывания защиты можно выбрать следующим образом:
tn (m+1)>K·tn (m) ,
где tn (m+1) - интервал времени прохода n-го дискретного участка на m+1-м цикле движения;
tn (m) - интервал времени прохода n-го дискретного участка на предшествующем m-м цикле движения;
К - критерий, численная величина которого может регулироваться. Физический смысл критерия К аналогичен описанному в п.4.
Данное условие допускает медленное уменьшение скорости движения от цикла к циклу, но не допускает резкого изменения характера движения двери на данном цикле по сравнению с предыдущим.
На фиг.1 показан описываемый пневмопривод с магниточувствительным щелевым датчиком, имеющим в своей конструкции две магниточувствительные микросхемы и два постоянных магнита. Стальная рейка с отверстиями перемещается в зазоре между магниточувствительными микросхемами и магнитами, а электронный блок анализирует сигналы с магниточувствительного щелевого датчика.
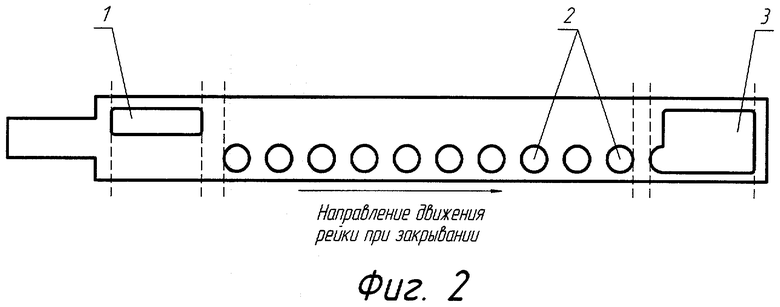
На фиг.2 - приблизительная конструкция рейки с отверстиями, характеризующими области конечного положения «Закрыто» 1, рабочего хода штока пневмоцилиндра 2 и начального положения «Открыто» 3.
Пневмопривод дверей автотранспортного средства с щелевым магниточувствительным датчиком и электронным антиблокировочным устройством содержит пневмораспределитель 1, рабочий пневмоцилиндр 2, магниточувствительный датчик 3, стальную рейку 4 с отверстиями 5, кронштейн жесткого крепления 6, направляющую 7, шток 8, электронный блок 9, и электрическую часть 10 управления пневмораспределителем (электромагниты пневмораспределителя).
Пневмопривод дверей автотранспортных средств с щелевым магниточувствительным датчиком и электронным антиблокировочным устройством работает следующим образом. При открывании и закрывании створок дверей автотранспортного средства шток 8 пневмоцилиндра 2 перемещается в крайние положения. Закрепленная на нем стальная рейка 4 свободно перемещается в зазоре магниточувствительного датчика 3, который считывает информацию о перемещении стальной рейки 4 при помощи отверстий 5, и передает информацию на электронный блок 9. В момент возникновения препятствия на пути створок происходит замедление хода штока 8, соответственно время прохождения n-го участка стальной рейки 4 в зазоре магниточувствительного датчика 3 увеличится. Далее сигнал передается на электронный блок 9, который может обработать информацию с датчика по различным алгоритмам защиты, и дать команду электрической части управления пневмораспределителем 10 о дальнейших действиях: открыть или закрыть створку двери.
Необходимый эффект повышения надежности системы сигнализации перемещения и конечных положений створок и антиблокировочной системы достигается за счет того, что:
1. В данной системе контроль за положением двери, и за моментом зажатия какого-либо объекта возложен на одно устройство, состоящее из стальной рейки 4 с отверстиями 5, закрепленной посредством кронштейна 6 на штоке 8, свободно и беспрепятственно перемещающейся в зазоре магниточувствительного датчика 3, сигналы с которого поступают на электронный блок управления 9. Шток 8 пневмоцилиндра 2 непосредственно соединен с дверью автотранспортного средства.
Соответственно, при возникновении препятствия на пути открывающейся/закрывающейся двери или зажатия скорость ее снижается. А так как, приводящий дверь в движение рабочий орган - шток 8 жестко соединен со стальной рейкой 4 посредством кронштейна 6, которая свободно перемещается в зазоре магниточувствительного датчика 3, то информация о замедлении скорости двери сразу поступает на электронный блок управления 9. Где сигнал с датчика 3 обрабатывается, а затем выдается команда об обратном ходе поршня.
Из выше сказанного следует, что стальная рейка 4 с отверстиями 5, жестко закрепленная на штоке 8 посредством кронштейна 6, напрямую, без вспомогательных устройств, измеряет скорость перемещения двери.
2. Для определения положения двери в процессе ее движения можно использовать тот же ряд отверстий 5 стальной рейки 4. Так как по всей длине рейки 4 расположены отверстия 5 одного и того же размера и через равные расстояния, то при их прохождении в зазоре датчика 3 генерируются сигналы, поступающие на блок управления 9, который одновременно производит слежение не только за скоростью перемещения рейки 4 (двери), но и подсчитывает количество пройденных в зазоре датчика 3 отверстий (количество поступивших импульсов), а соответственно при помощи тех же отверстий 5 определяет положение двери в процессе движения, так как шток привода 8 и рейка 4 движутся одновременно, как одно целое, посредством их жесткого соединения через кронштейн 6 без вспомогательных механических устройств.
3. Помимо определения скорости прохождения рейки 4 датчиком 3, если последний имеет в своем составе две магниточувствительные микросхемы, можно напрямую определить конечные положения двери закрыто/открыто при помощи соответственно отверстий 1 и 3 (фиг.2) разной формы, так же расположенных на рейке 4. Когда в начале или конце хода двери отверстия 1 или 3 рейки 4 находятся в зазоре датчика 3, на блок управления 9 поступает сигнал в виде двухразрядного двоичного кода с информацией о том, что дверь открыта или закрыта. Так как в щелевом датчике имеются две магниточувствительные микросхемы, то при прохождении рейки в зазоре могут иметь место следующие состояния датчика:
1-е конечное положение «ЗАКРЫТО» в зазоре отверстие 1, при этом одна микросхема датчика находится под воздействием поля постоянного магнита, другая экранирована рейкой.
2-е конечное положение «ОТКРЫТО» в зазоре отверстие 3, при этом обе микросхемы датчика находятся под воздействием поля постоянного магнита.
3-е промежуточное положение в зазоре отверстия 2, при этом одна микросхема датчика экранирована рейкой, другая подвергается попеременному воздействию поля постоянного магнита в результате перемещения в зазоре датчика щелевого отверстия ряда 2.
Как видим, значение двухразрядного двоичного кода в среднем положении отличается от кодов в крайних положениях, а значение двоичного кода в закрытом положении отличается от кода в открытом положении. Данный способ определения конечных положений двери более прост, так как не требует постоянного контроля и расчета оставшегося или пройденного расстояния хода двери.
4. Как говорилось выше, на стальной рейке 4 (фиг.2) выполнены отверстия 2 одного размера и через одинаковое расстояния, отвечающие за определение: скорости перемещения двери, и ее положения в момент движения. Пусть таких отверстий будет 10. Расстояние от одного отверстия до другого назовем дискретным участком n. Тогда при прохождении такого дискретного участка в зазоре датчика 3 выдается сигнал о положении рейки (двери) и скорости их перемещения на этом участке n на блок управления. Информация о положении рейки (двери) и скорости прохождения данного дискретного участка n записывается, и при следующем идентичном цикле сравнивается с информацией предыдущего цикла.
Например при свободном ходе двери (без зажатия) в блоке управления сохраняется информация о скорости прохождения каждого дискретного участка. Тогда, если произошло зажатие или в дверном проеме автотранспортного средства оказался любой предмет меньшей массы, скорость движения двери снижается, соответственно это сразу отражается на скорости перемещения рейки 4 в зазоре датчика 3, с которого сигнал поступает на блок управления 9, и сравнивается с последним значением сигнала скорости перемещения рейки 4 без зажатия. А так как скорость перемещения рейки 4 (двери) при зажатии или возникновения препятствия на пути двери ниже, чем при свободном перемещении (без зажатия), то сравнивая данные с датчика 3 блок управления 9 делает вывод о возникновении препятствия на пути двери, и дает команду на обратный ход.
5. Предлагаемое изобретение является полностью электронным устройством без пружин, механизмов натяжения, подшипников, механических передач, роликов и их блоков и т.д. А так как функции отслеживания скорости перемещения и положения двери сформированы на одном устройстве, состоящем из щелевого магниточувствительного датчика 3, стальной рейки 4 с отверстиями 5 (фиг.1) и блока управления 9, то можно гарантированно судить о более надежной работе данного устройства, и простоте обработки информации. Вследствие того что вся информация поступает с простейшего устройства - датчика 3 и рейки 4, закрепленного непосредственно на штоке 8, количество шагов обработки информации меньше аналогов US 6009671 (СА 2218946) в два раза.
6. Так же эффект достигается за счет использования микропроцессора в электронном блоке. С помощью микропроцессора можно задать оптимальный алгоритм функции антиблокировки, позволяющий во многих случаях определить, когда замедление двери связано с внешним препятствием, а когда от характерного для двери изменения характера движения под влиянием внутреннего сопротивления, и исключить ложное срабатывание.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОПРИВОД ДВЕРЕЙ АВТОТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОННЫМ УСТРОЙСТВОМ ЗАЩИТЫ ПАССАЖИРА ОТ ЗАЖИМА ЗАКРЫВАЮЩЕЙСЯ И ОТКРЫВАЮЩЕЙСЯ ДВЕРЬЮ | 2008 |
|
RU2376157C1 |
| ПНЕВМОПРИВОД ДВЕРЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА С АНТИБЛОКИРОВОЧНЫМ УСТРОЙСТВОМ | 2000 |
|
RU2198102C2 |
| ПНЕВМОПРИВОД ДВЕРЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА С АНТИБЛОКИРОВОЧНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2259927C1 |
| Устройство для определения наличия препятствия в створе сдвижных дверей | 2024 |
|
RU2834107C1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2206691C1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ КЛАПАННЫЙ ПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2178055C1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ КЛАПАННЫЙ ПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2190784C2 |
| ПНЕВМОПРИВОД ДВЕРИ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2206692C1 |
| МЕМБРАННЫЙ ПОВОРОТНЫЙ ДВУХПОЗИЦИОННЫЙ ПНЕВМОДВИГАТЕЛЬ | 1994 |
|
RU2097608C1 |
Изобретение относится к области пневматики и может быть использовано в качестве исполнительного механизма управления створками дверей автобусов и троллейбусов с защитой пассажира от зажима и от ударов створками дверей. Пневмопривод дверей автотранспортного средства содержит пневмоцилиндр (2), управляемый пневмораспределителем (1), устройство сигнализации конечных положений двери и аварийного открывания двери пассажиром из салона, устройство антиблокировочной системы от зажатия. Устройство антиблокировки включает щелевой магниточувствительный датчик (3) с подвижной стальной рейкой (4), совмещающий функции слежения, контроля скорости перемещения двери и определения положения двери при ее движении, выдавая сигнал о возникновении препятствия. Устройство антиблокировки является электронным устройством, способным запоминать ряд скоростей на дискретных участках хода подвижной стальной рейки (4), сравнивать их с предыдущими данными, давать команду, препятствующую зажатию створками дверей, и выдавать информацию о ее положении. Подвижная стальная рейка (4) снабжена отверстиями (5) для определения скорости ее перемещения и обоих конечных положений открыто и закрыто. Технический результат заключается в повышении надежности и улучшении функциональных свойств системы определения конечного положения створок дверей и антиблокировочной системы. 2 ил.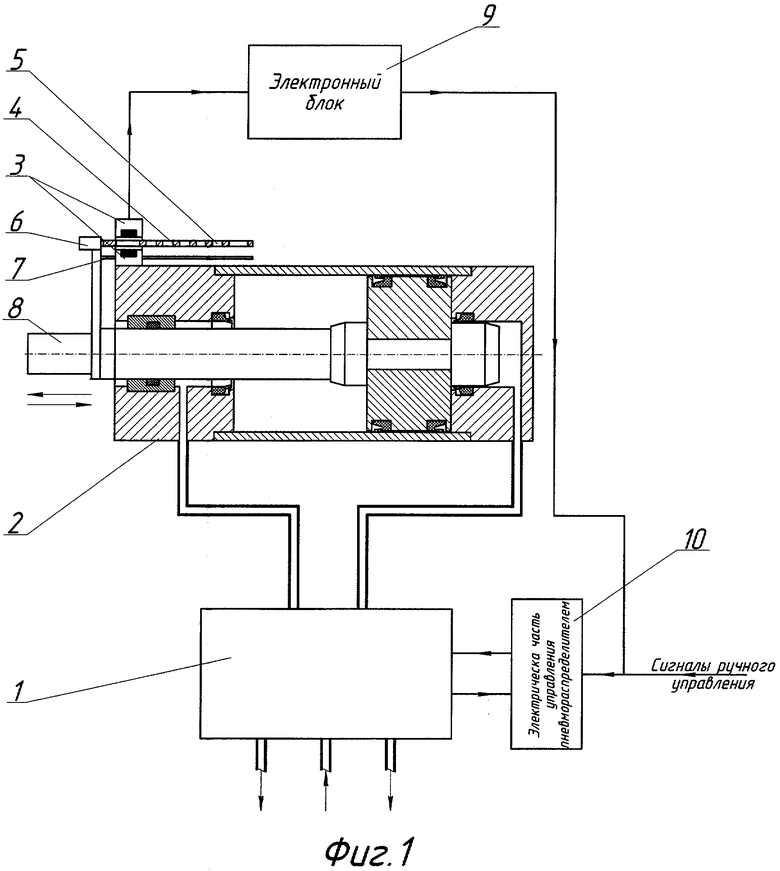
Пневмопривод дверей автотранспортного средства, содержащий пневмоцилиндр, управляемый пневмораспределителем, устройство сигнализации конечных положений двери и аварийного открывания двери пассажиром из салона, устройство антиблокировочной системы от зажатия, работающее посредством отслеживания и контроля перемещения створок дверей, включающее щелевой магниточувствительный датчик, отличающийся тем, что устройство антиблокировки включает щелевой магниточувствительный датчик с подвижной стальной рейкой, при этом щелевой магниточувствительный датчик совмещает функцию слежения и контроля скорости перемещения двери и функцию определения положения двери в каждый момент времени при ее движении, выдавая сигнал о возникновении препятствия, если такой случай произошел; устройство антиблокировки является полностью электронным устройством, способным запоминать ряд скоростей на дискретных участках хода подвижной стальной рейки, а соответственно и двери, сравнивать их с предыдущими данными, делать вывод о препятствии, при необходимости давать команду, препятствующую зажатию при открытии или закрытии двери, а также одновременно выдавать информацию о ее положении; в конструкции подвижной стальной рейки присутствуют отверстия, предназначенные для определения скорости ее перемещения и определения обоих конечных положений "открыто" и "закрыто", причем, исходя из потребностей, на подвижной стальной рейке может присутствовать отверстие, отвечающее за положение либо "открыто", либо "закрыто"; устройство антиблокировки способно учитывать возможность постепенного изменения средней скорости движения и характера распределения мгновенных скоростей по длине хода штока в процессе длительной эксплуатации.
| ПНЕВМОПРИВОД ДВЕРЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА С АНТИБЛОКИРОВОЧНЫМ УСТРОЙСТВОМ | 2000 |
|
RU2198102C2 |
| СПОСОБ ПРЕОДОЛЕНИЯ АЛКОГОЛЬНОЙ АНОЗОГНОЗИИ | 2002 |
|
RU2218946C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ГАЗОИМПУЛЬСНОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ НАГРЕВА КАМЕР КОНВЕКЦИИ НЕФТЕНАГРЕВАТЕЛЬНЫХ ПЕЧЕЙ | 2007 |
|
RU2358220C2 |
| JP 2003137087 А, 14.05.2003. | |||

