Изобретение относится к техническим средствам обучения водителей преимущественно крупногабаритных транспортных средств и предназначено для обеспечения возможности визуального контроля трае ктории движения невидимой водителю части крупногабаритного агрегата путем световой проек- Ции пятна, замещающего контролируему точку агрегата, непосредственно пере реальным транспортным средством на дорожном полотне.
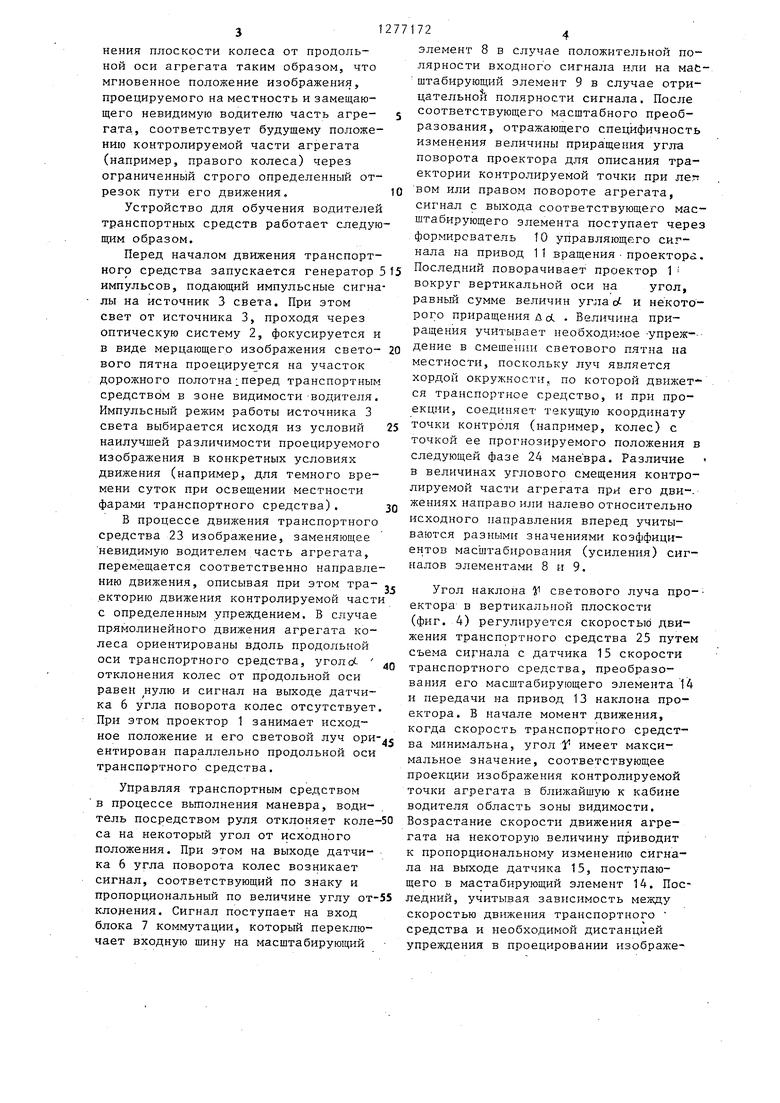
На фиг. 1 представлена функдио- нальная блок-схема предложенного устройства; на фиг. 2 - внешний вид проектора, установленного в двухстепенном подвесе; на фиг. 3 - пример измерения угла поворота светового луча проектора в горизонтальной плоскости при повороте колес агрегата; на фиг, 4 - пример изменения yrxia наклона светового луча проектора в вертикальной плоскости при изменении скорости движения транспортного средства; на фиг. 5 - пример коррекции угла поворота светового луча проектора Б горизонтальной плоскости при изменении угла его наклона в верти- сальной плоскости.
Устройство для обучения водителей транспортных средств содержит проектор 1, снабженный оптической системой 2, фокусирующая линза которой выполнена с возможностью поступательных перемещений относительно источника 3 света при помощи узла 4 фокусировки (например, соленоидного типа), Источник 3 света подключен к генератору 5 импульсов. Датчик 6 угла поворота колес транспортного средства выполнен в виде потенцио- метрического делителя напряжения, ползунок которого механически связан с рулевой трапецией колес таким образом, что в среднем положении ползунка колес агрегата сориентированы параллельно продольной оси транспортного средства. Выход датчика 6 соединен с входом блока 7 коммутации чувствительного к полярности входного сигнала и выполненного, например, на основе поляризованного реле Выходы блока 7 коммутации соединены через масштабирующие элементы 8 и 9 . (например, усилители с разными коэффициентами усиления) с информационным входом формирователя 10 управляющего сигнала, который выполнен.
5
0
5
0
5
0
5
0
5
например, в виде управляемого усили теля, имеющего переменный коэффициент усиления с возможностью его регулирования внешним сигналом в сторону увеличения и уменьшения от исходного значения, равного единице. Выход формирователя 10 соединен с приводом 11 вращения проектора (выполненного, например, в виде соленоида, установленного на опоре подвеса проектора и механически связанного при помощи рычага с его вертикальной осью), а управляющий вход подключен к выходу блока, 12 коррекции.
Блок 12 коррекции предназначен для умножения значения переменного сигнала, поступающего с информационного входа, на некоторую постоянную величину, задаваемую на его управляющем входе. Информационный вход блока 12 совпадает с входом привода 13 наклона проектора (выполненного, например, в виде соленоида, установленного между корпусом проектора 1 и рамой его подвеса и через третий масштабирующий элемент 14 соединенный с выходом датчика 15 скорости транспортного средства). К выходу .датчика 15 подключен также вход четвертого масштабирующего элемента 16, выход которого соединен с узлом 4 фокусировки проектора 1.
Проектор 1 с оптической системой 2 установлен в двухстепенном подвесе 17 при помощи опорных подшипни- ков 18 и 19. Привод 11 вращения проектора одним концом контактирует посредством поворотного сочленения 20 с основанием 21 подвеса, а другим концом соединен с рычагом 22 вертикальной оси подвеса 17. Привод 13 наклона проектора установлен между рамой подвеса 17 и корпусом проектора 1 ,
Подвес 17 с установленным на нем проектором 1 закрепляется основанием 21 на верхней части кузова агрегата таким образом, чтобы световой луч проецировался на участок дорожного полотна перед транспортным средством в зоне видимости водителя. Углы наклона луча в вертикальной и отклонения в горизонтальной плоскостях являются регулируемыми и определяются периметрами движения и маневра транспортного средства. При этом угловое отклонение проектора 1 в горизонталь-- ной плоскости связано с углом откло3
нения плоскости колеса от продольной оси агрегата таким образом, что мгновенное положение изображения, проецируемого на местность и замещающего невидимую водителю часть агре- гата., соответствует будущему положению контролируемой части агрегата (например, правого колеса) через ограниченный строго определенный отрезок пути его движения.
Устройство для обучения водителей транспортных средств работает следующим образом.
Перед началом движения транспортного средства запускается генератор 5 импульсов, подающий импульсные сигналы на источник 3 света. При этом свет от источника 3, проходя через оптическую систему 2, фокусируется и в виде мерцающего изображения свето- вого пятна проецируе тся на участок дорожного полотна:перед транспортным средствЬм в зоне видимости-водителя. Импульсный режим работы источника 3 света выбирается исходя из условий наилучшей различимости проецируемого изображения в конкретных условиях движения (например, для темного времени суток при освещении местности фарами транспортного средства).
В процессе движения транспортного средства 23 изображение, заменяющее невидимую водителем часть агрегата, перемещается соответственно направлению движения, описывая при этом тра- екторию движения контролируемой част с определенным упреждением. В случае прямолинейного движения агрегата колеса ориентированы вдоль продольной оси транспортного средства, уголсз - отклонения колес от продольной оси равен нулю и сигнал на выходе датчика 6 угла поворота колес отсутствует При этом проектор 1 занимает исходное положение и его световой луч ори ентирован параллельно продольной оси транспортного средства.
Управляя транспортным средством в процессе выполнения маневра, водитель посредством руля отклоняет колеса на некоторый угол от исходного положения. При этом на выходе датчика 6 угла поворота колес возникает сигнал, соответствующий по знаку и пропорциональный по величине углу отклонения. Сигнал поступает на вход блока 7 коммутации, который переключает входную шину на масштабирующий
1724
элемент 8 в случае положительной полярности входного сигнала или на Mat штабирующий элемент 9 в случае отрицательной полярности сигнала. После соответствующего масштабного преобразования, отражающего специфичность изменения величины приращения угла поворота проектора для описания траектории контролируемой точки при ле.тт вом или правом повороте агрегата, сигнал с выхода соответствующего масштабирующего элемента поступает чере формирователь 10 управляющего сигнала на привод 11 вращенияпроектора Последний поворачивает проектор 1 вокруг вертикальной оси на угол, равный сумме величин угла ot и некоторого приращеЕшя д сз(. . Величина приращения учитывает необходимое -упреждение в смешении светового пятна на местности, поскольку луч является хордой окружности., по которой движется транспортное средство, и при проекции, соединяет текущую координату точки контроля (например, колес) с точкой ее прогнозируемого положения в следующей фазе 24 маневра. Различие в величинах углового смещения контролируемой части агрегата при его дви-. жениях направо или налево относительно исходного направления вперед учитываются разными значениями коэффициентов масштабирования (усиления) сигналов элементами 8 и 9.
Угол наклона J1 светового луча проектора в вертикальрюй плоскости (фиг. 4) регулируется скоростью движения транспортного средства 25 путем съема сигнала с датчика 15 скорости транспортного средства, преобразования его масштабирующего элемента 14 и передачи на привод 13 наклона проектора. В начале момент движения, когда скорость транспортного средства минимальна, угол 1 имеет максимальное значение, соответствующее проекции изображения контролируемой точки агрегата в ближайшую к кабине водителя область зоны видимости. Возрастание скорости движения агрегата на некоторую величину приводит к пропорциональному изменению сигнала на выходе датчика 15, поступающего в мастабирующий элемент 14. Последний, учитывая зависимость между скоростью движения транспортного средства и необходимой дистанцией упреждения в проецировании изображеS1
ния, приводит в действие привод 13 наклона проектора и уменьшает, тем самым, угол наклона проектора 1 на величину д J (фиг. 4), пропорциональную приращению скорости. При этом световое пятно, замещающее контролируемую точку транспортного средства 23, перемещается вдоль направления светового луча по поверхности дорожного полотна в более дальнюю от во- дителя область видимой зоны местнос- ,ти. При уменьшении скорости движения транспортного средства величина сигнала на выходе датчика 15 уменьшается и изменяет, через масштабирую- щий элемент 14, положение привода 13 увеличивая угол у наклона проектора 1 в вертикальной плоскости. Тем самым дистанция упреждения в проецировании светового пятна уменьшается,
Четкость изображения, проецируемого на местность, при изменении угла наклона проектора обеспечивается при помощи масштабирующего элемента 16, преобразующего сигнал с выхода дат- чика 15 скорости транспортного средства в управляющий сигнал для узла 4 фокусировки проектора 1. По сигналам элемента 16 узел 4 линейно перемещает, фокусирующую линзу оптической систе- мы 2 относительно источника 3 света таким образом, что в точке пересечения луча света с поверхностью дорожного полотна четкость контуров светового пятна сохраняется постоянной.
Для обеспечения точности прогнозирования координат будущего положения контролируемой точки агрегата при изменениях в зависимости от скорости движения угла наклона проектора вертикальной плоскости осуществляется коррекция угла поворота проектора в горизонтальной плоскости. Коррекция угла /3 производится блоком коррекции 12, определяющим коэффи- циент К деформации сигнала путем умножения текущего значения сигнала о величине угла у , снимаемого с выхода масштабирующего элемента 14, на поправочный коэффициент М, имеющийся на-управляющем входе блока 12. Коэф- фициент М задают исходя из высоты размещения проектора 1 на кузове аг1726
регата относительно поверхности грунта. Вычисленное значение коэффициента К поступает в качестве заданного коэффициента усиления на управляющий вход формирователя 10 управляющего сигнала. При этом значение выходного сигнала последнего изменяется, управляя состоянием привода 11 вращения проектора 1. Проектор поворачивается вокруг вертикальной оси на дополни- тельную величину угла д/3 , соответ- ртвующую приращению угла наклона проектора д . Изображение светового пятна, замещающее контролируемую точку агрегата, отклоняется, отражая изменения прогнозируемых координат будущего положения этой точки в условиях изменившейся величины упреждения фазы маневра транспортного средства (фиг. 5).
Формула изобретения
Устройство для обучения водителей транспортных средств, содержащее про ектор с оптической системой, связанной с узлом фокусировки, источником света, подключенным к выходу генератора импульсов, датчик скорости транспортного средства и датчик угла поворота колес, отличающееся тем, что, с целью повышения эффективности обучения, оно снабжено приводами вращения и наклона проектора, масштабирующими элементами, формирователем управляющего сигнала, блоком коррекции и блоком коммутации вход которого подключен к выходу датчика угла поворота колес, а выход через первый и второй масштабирующие элементы - к одному из входов формирователя управляющего сигнала, выход которого соединен с приводом вращения проектора, а другой вход - с выходом блока коррекции, вх5д которого соединен с выходом третьего масштабирующего элемента, соединенны с приводом наклона проектора, а входом подключенным к выходу датчика скорости транспортного средства, который через четвертый масштабирующий элемент соединен с узлом фокусировки.
fPuz.2
Фи.г.3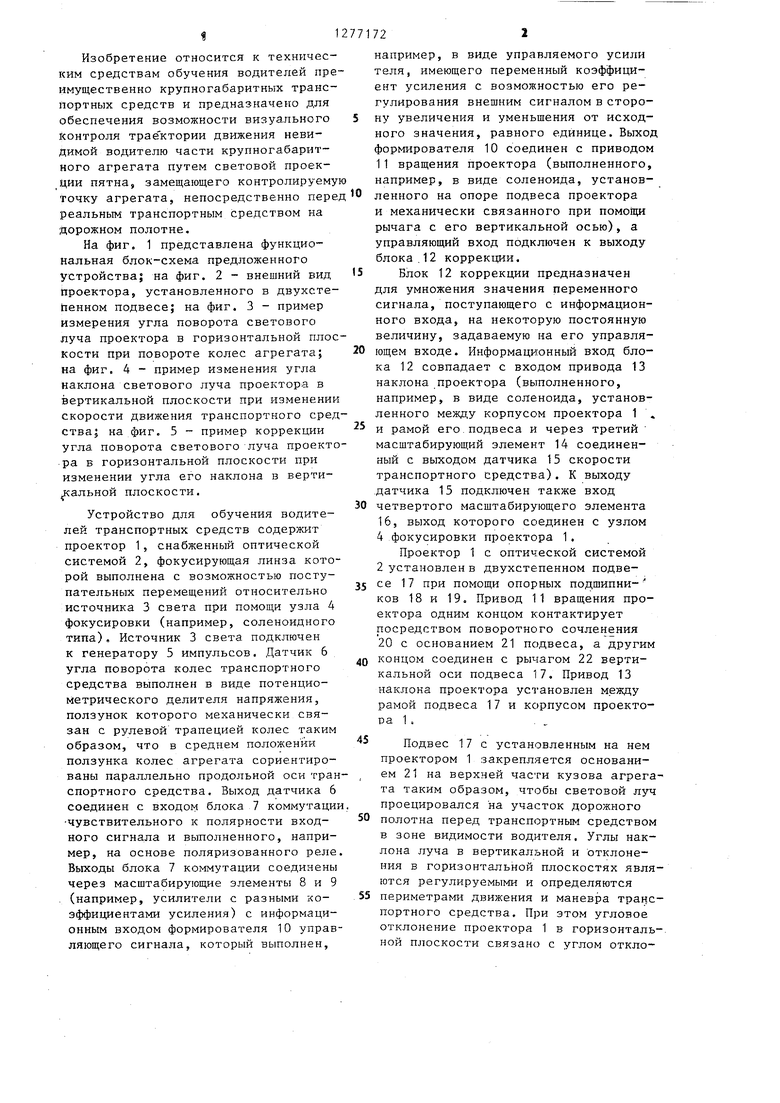

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для имитации визуальной обстановки в тренажере транспортного средства | 1984 |
|
SU1218416A1 |
| Стенд для контроля углов установки управляемых колес транспортного средства | 1986 |
|
SU1352195A1 |
| Снегоход | 2018 |
|
RU2765071C2 |
| ОПТИЧЕСКИЙ СТЕНД ДЛЯ КОНТРОЛЯ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2034261C1 |
| Тренажер водителя транспортного средства | 1980 |
|
SU934530A1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| ИЗМЕРИТЕЛЬ ДИНАМИКИ ВОЖДЕНИЯ СРЕДСТВ СУХОПУТНОГО ТРАНСПОРТА | 1995 |
|
RU2104511C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ КИНООПЕРАТОРА | 1991 |
|
RU2032200C1 |
| УСТРОЙСТВО СТАШЕВСКОГО И.И. ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ АВТОМОБИЛЯ | 1999 |
|
RU2171501C2 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |


Изобретение относится к устройствам для обучения водителей транспортных средств с возможностью .визуального контроля траектории движения невидимой водителю части. Цель изоб- ретещ1я - повьшение эффективности обучения. Лроектор 1 снабжен оптической системой 2, фокусирующая линза которой выполнена .с возможностью поступательных перемещений относительно источника 3 света. Датчик 6 угла поворота колес транспортного средства выполнен в виде потенцио- метрического делителя напряжения. Выходы блока 7 коммутации соединены через масштабирующие элементы 8 и 9 с информационным входом формировате- ля 10 управляющего сигнала. Свет от источника, проходя через оптическую систему 2, фокусируется и в виде мерцающего изображения светового пятна проецируется на участок дорожного полотна перед транспортным средством в зоне видимости водителя. 5 ил. IsD Ю (Риг
У
.
А
(Риг.5
Составитель Л. Резникова Техред Л.Олейник
Тираж 455
ВНИИПИ Государ.ственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор М. Демчик
Подписное
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2494878C1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
