Изобретение относится к измерительной технике и может быть использовано для настройки и анализа точности работы одноосного силового горизонтального гиростабилизатора с имитацией его движения на вираже в лабораторных условиях.
Известно устройство «Одноосный силовой горизонтальный гиростабилизатор» для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости (Авторское свидетельство СССР, №790923, авторов Арутюнова С.С., Хохлова В.М. /опубликовано 07.01.1982 бюл. №1), которое содержит контур силовой гироскопической стабилизации (цепь межрамочной коррекции), состоящий из последовательно соединенных датчика углов прецессии, усилителя стабилизации и разгрузочного двигателя (стабилизирующего мотора); цепь приведения (контур коррекции), состоящий из последовательно соединенных маятникового датчика угла, усилителя коррекции и датчика моментов; контур компенсации виражных погрешностей, состоящий из последовательно соединенных датчика линейной скорости объекта и суммирующе-преобразующего устройства, включенного во входную цепь усилителя стабилизации. При этом сигнал линейной скорости объекта поступает с коэффициентом скоростной коррекции

где S - крутизна контура стабилизации; K - крутизна контура приведения; Н - кинетический момент гироскопа; g - ускорение свободного падения; R - радиус Земли.
Однако, если проанализировать входящие в выражение (1) слагаемые, то для реальных значений параметров, второе слагаемое пренебрежимо меньше первого, и поэтому выражение для коэффициента скоростной коррекции можно представить в виде

В устройстве не указано, как будет происходить настройка указанного коэффициента либо в реальных условиях разворота, либо в лабораторных условиях при имитации виража.
В качестве прототипа взято «Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости» (Патент РФ №2676951 авторов Кривошеева С.В., Гатауллиной Д.Р. / опубликовано 11.01.2017, бюл. №2), которое также содержит одноосный силовой горизонтальный гиростабилизатор с вертикальной осью ротора в кардановом подвесе, установленный на подрессоренном кузове, механически фиксированном на измерительной колесной паре, при этом гиростабилизатор имеет цепь межрамочной коррекции, включающую последовательно соединенные датчик угла прецессии на внутренней оси подвеса, усилитель стабилизации, на первый вход которого подключен выход датчика угла прецессии, а на второй - датчик линейной скорости объекта, состоящий из последовательно соединенных тахогенератора и масштабного усилителя, а выход усилителя стабилизации соединен с двигателем, установленным на наружной оси подвеса, на которой также установлен системный датчик угла, и цепь приведения, включающую последовательно соединенные маятниковый датчик угла, установленный на наружной оси подвеса, усилитель коррекции и датчик момента, установленный на внутренней оси подвеса. Системный датчик угла применен для создания электрической системы компенсации колебаний подрессоренного вагона относительно колесной пары, а в предлагаемом устройстве он будет использоваться в качестве измерителя угла отклонения наружной рамы гиростабилизатора при осуществлении настройки в лабораторных условиях.
В прототипе для компенсации погрешностей на вираже от центростремительного ускорения введена скоростная коррекция, осуществляющая наклон ротора гиромотора (вектора кинетического момента) вперед по направлению движения на угол, пропорциональный скорости движения путеизмерителя. При соответствующем выборе коэффициента скоростной коррекции, определяемым выражением (2), погрешность (отклонение от плоскости горизонта наружной рамы), обусловленная дополнительным отклонением маятникового датчика угла за счет возмущающего действия центростремительного ускорения будет сведена к минимуму. Для измерения этой погрешности можно использовать системный датчик угла, служащий в путеизмерителе для измерения углового отклонения колесной пары от плоскости горизонта. Для проверки точности работы скоростной коррекции необходимо установить одноосный силовой горизонтальный гиростабилизатор на путеизмеритель и совершить проезд на участке пути в кривых и замерить показания системного датчика угла. Так как на участке поворота рельсы наклонены, то, вычитая из показаний системного датчика угла заранее известный наклон рельсовых ниток, будет определена погрешность положения рамы в горизонте. В силу того, что параметры, входящие в коэффициент скоростной коррекции имеют разброс до 10% - 15%, достигнуть заданной точности за один проезд не удается, к тому же это трудоемкая процедура. Поэтому возникает необходимость настройки данного коэффициента с последующим проездом по данному криволинейному маршруту. Обычно эта процедура требует от 4 до 6 итераций.
Недостаток прототипа с позиции настройки коэффициента скоростной коррекции состоит в том, что требуется устанавливать гиростабилизатор в путеизмеритель, совершать несколько проездов по эталонному криволинейному участку пути, исключать из показания системного датчика угла угол наклона рельсовых ниток и учитывать колебания вагона. Все эти компоненты приводят к уменьшению точности настройки и увеличению трудоемкости.
Техническим результатом изобретения является повышение точности работы одноосного силового горизонтального гиростабилизатора на вираже и снижение трудоемкости настройки контура скоростной коррекции в лабораторных условиях с имитацией реального движения путеизмерителя.
Технический результат достигается тем, что в установке для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях, содержащей одноосный силовой горизонтальный гиростабилизатор с вертикальной осью ротора в кардановом подвесе, включающий цепь межрамочной коррекции, состоящую из последовательно соединенных датчика угла прецессии на внутренней оси подвеса, усилителя стабилизации, на первый вход которого подключен выход датчика угла прецессии, а на второй - выход датчика линейной скорости объекта, состоящий из последовательно соединенных тахогенератора и масштабного усилителя, а выход усилителя стабилизации соединен с двигателем, установленным на наружной оси подвеса, с которой кинематически связан системный датчик угла, и цепь приведения, включающую последовательно соединенные маятниковый датчик угла, установленный на наружной оси подвеса и подключенный на первый вход усилителя коррекции и датчик момента, установленный на внутренней оси подвеса, новым является то, что в нее введены поворотная платформа и контур имитации влияния центростремительного ускорения, состоящий из датчика угловой скорости, закрепленного на поворотной платформе с входной осью параллельной оси ее вращения, блока умножения, выход которого подключен на второй вход усилителя коррекции, при этом первый вход блока умножения соединен с выходом датчика угловой скорости, а второй вход - с выходом тахогенератора, который кинематически соединен с двигателем, имитирующим вращение колесной пары, на вход которого подключен задатчик линейной скорости объекта.
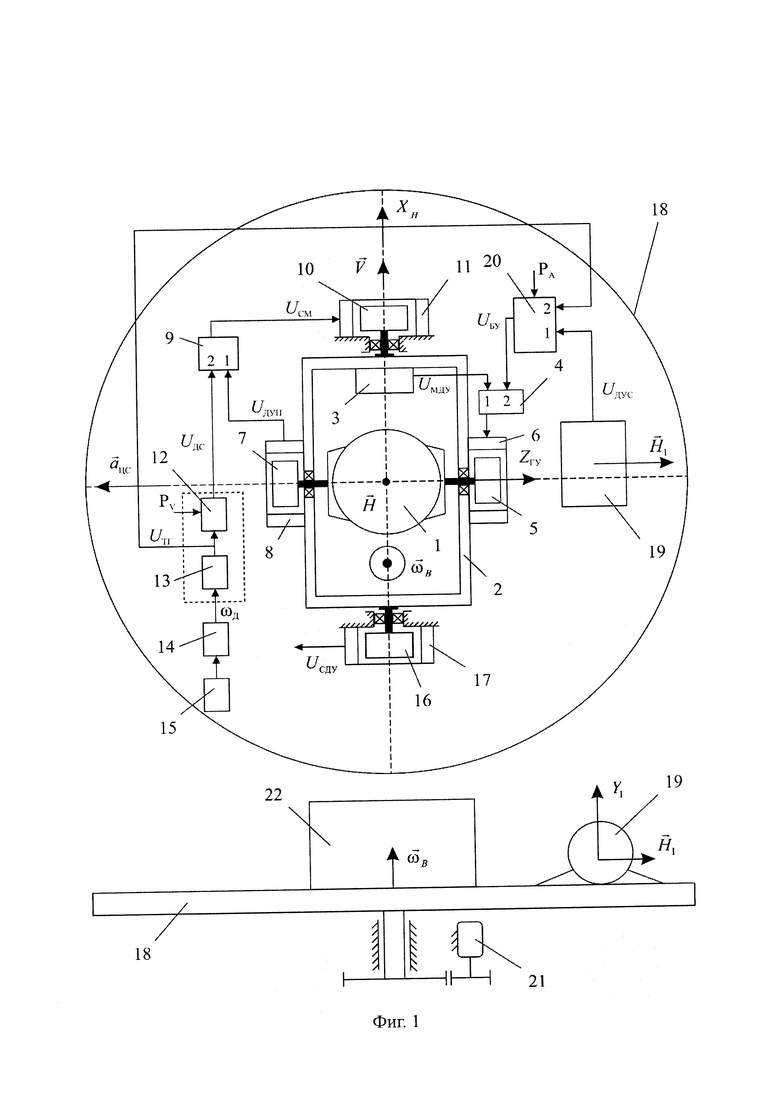
Сущность изобретения поясняется фиг. 1, на которой представлена структурно-кинематическая схема установки.
Здесь:
1 - гироузел (внутренняя рамка с вертикальной осью ротора гиромото-ра) с полуосями;
2 - наружная рама с полуосями;
3 - маятниковый датчик угла (МДУ);
4 - усилитель коррекции;
5 - ротор датчика момента;
6 - статор датчика момента;
7 - ротор датчика угла прецессии;
8 - статор датчика угла прецессии;
9 - усилитель стабилизации;
10 - ротор двигателя (стабилизирующего мотора);
11 - статор двигателя (стабилизирующего мотора);
12 - масштабный усилитель;
13 - тахогенератор;
14 - двигатель, имитирующий вращение колесной пары;
15 - задатчик линейной скорости;
16 - ротор системного датчика угла;
17 - статор системного датчика угла;
18 - поворотная платформа;
19 - гироскопический датчик угловых скоростей (ДУС);
20 - блок умножения;
21 - привод вращения платформы;
22 - одноосный силовой горизонтальный гиростабилизатор (ОСГГС);
 - кинетический момент ротора гиромотора ОСГГС;
- кинетический момент ротора гиромотора ОСГГС;
 - кинетический момент ротора гиромотора ДУС;
- кинетический момент ротора гиромотора ДУС;
V - линейная скорость движения;
а цс - центростремительное ускорение;
XH - ось подвеса наружной рамы гиростабилизатора;
ZГУ - ось подвеса гироузла;
У1 - входная ось ДУС;
ωB - угловая скорость виража;
ωд - угловая скорость двигателя 14;
ωк - угловая скорость колесной пары;
Uдуп - выходное напряжение датчика углов прецессии;
Uсм - напряжение управления стабилизирующим мотором;
Uдс - напряжение датчика скорости;
Uмду - напряжение маятникового датчика угла;
Uдус - выходное напряжение ДУС;
Uбу - выходное напряжение блока умножения;
Uсду - выходное напряжение системного датчика угла;
PV - ручка для регулировки коэффициента передачи масштабного усилителя;
РА - ручка для регулировки коэффициента передачи блока умножения.
В соответствии с фиг. 1 установку функционально можно представить в виде следующих функциональных узлов: поворотная платформа типа МПУ-1 (эта платформа широко применяется при проверках работы гироприборов), собственно одноосный силовой горизонтальный гиростабилизатор и узел, имитирующий действие центростремительного ускорения на вираже (на повороте) - контур имитации влияния центростремительного ускорения.
Одноосный силовой горизонтальный гиростабилизатор.
Гироузел 1 с вертикальной осью ротора гиромотора установлен в наружной раме 2 с полуосями, размещенными в корпусе и ориентированными по направлению движения. Цепь межрамочной коррекции содержит датчик угла прецессии (ротор 7 и статор 8), установленный на внутренней оси подвеса, подключенный на первый вход усилителя стабилизации 9, выход которого соединен с двигателем (ротор 10, статор 11), установленным на наружной оси подвеса. Цепь приведения содержит последовательно соединенные маятниковый датчик 3 угла, установленный на наружной оси подвеса, усилитель коррекции 4 и датчик момента (ротор 5, статор 6), установленный на внутренней оси подвеса. Цепь компенсации содержит последовательно соединенные тахогенератор 13, вход которого соединен с двигателем 14, на который подается питание с задатчика скорости 15 (они имитируют вращение измерительной колесной пары), а выход которого подключен на вход масштабного усилителя 12, выход которого соединен со вторым входом усилителя стабилизации 9. Выходной сигнал гиростабилизатора формируется системным датчиком угла (ротор 16, статор 17), расположенным на полуоси наружной рамы 2. Выходной сигнал системного датчиком угла Uсду используется при настройке цепи компенсации.
Гиростабилизатор 22 жестко крепится к платформе 18 таким образом, чтобы центр масс маятникового датчик угла 3 проходил через ось вращения платформы 18. Платформа 18 приводится во вращение с угловой скоростью ωВ с помощью привода 21 с регулируемой скоростью вращения. ДУС 19 также крепится жестко на платформе 18 так, чтобы его входная ось Y1 была параллельна оси вращения платформы.
Контур имитации влияния центростремительного ускорения включает в себя частично новые блоки: ДУС 19, блок умножения 20, двигатель, имитирующий вращение колесной пары 14, обеспечивая равенство ωд=ωк за счет сигнала, формируемого задатчиком линейной скорости 15, а также блоки прототипа - тахогенератор 13, подключенный на вход масштабного усилителя 12. При этом на выходе блока умножения 20 должно сформироваться напряжение Uбу, соответствующее выходному напряжению Uмду маятникового датчика угла 3 при действии центростремительного ускорения на повороте (при движении в кривых).
Последовательность настройки цепи компенсации в лабораторных условиях.
Вариант 1. Настройка на центрифуге. При этом ОСГГС устанавливают на платформу центрифуги, смещая центр масс МДУ относительно оси вращения на величину R1, а угловая скорость ω1 при этом определяется из соотношения равенства центростремительных ускорений
где ωв, Rв - угловая скорость и радиус виража (поворота в кривых); ω1, R1 - угловая скорость платформы центрифуги и радиус смещения ОСГГС от ее оси вращения.
При этом угловая скорость вращения платформы центрифуги определяется соотношением
Пример. При движении на повороте с параметрами  и Rв=400 м угловая скорость платформы центрифуги при R1=0,5 м будет равна
и Rв=400 м угловая скорость платформы центрифуги при R1=0,5 м будет равна 
Особенность этого способа состоит в том, что к центру масс маятникового датчика угла 3 прикладывается реальная инерционная сила -  где m - масса подвижной системы МДУ.
где m - масса подвижной системы МДУ.
Вариант 2. Настройка на малогабаритной поворотной установке МПУ-1. При этом ОСГГС устанавливают на платформу МПУ-1, без смещения центр масс МДУ относительно оси вращения установки, а угловая скорость платформы ω1 при этом задается равной угловой скорости виража ωв. Сигнал по скорости соответствует также реальной скорости движения путеизмерителя. Действие центростремительного ускорения имитируется электрическим сигналом аналогичным тому, который возникает при действии центростремительного ускорения при движении путеизмерителя в кривых.
Последовательность настройки.
Идея настройки состоит в том, чтобы при имитации движения на вираже напряжение системного датчика угла 16-17 находилось в заданных пределах, например, соответствовало заданной погрешности превышения рельсовых нитей в угловой мере (4 угловых минуты).
1. Центрирование ОСГГС на платформе МПУ-1.
ОСГГС 22 устанавливают на платформу и приводят его в рабочее состояние. Через 5 минут (время разгона гиромотора) измеряют напряжение на МДУ 3 и включают вращение платформы 18 МПУ-1 с повышенной скоростью, подавая питание на привод 21. Если напряжение не меняется, то центр масс МДУ 3 находится на оси вращения. В противном случае корпус ОСГГС 22 смещают к оси вращения или в противоположную сторону, добиваясь минимального значения сигнала с МДУ 3. После центрирования вращение платформы выключают.
2. С помощью задатчика линейной скорости 15 подают управляющее напряжение на двигатель 14, имитирующий вращение колесной пары, чтобы его угловая скорость ωдв соответствовала угловой скорости ωк колесной пары с радиусом rк, т.е.
Угловую скорость можно определить по сигналу тахогенератора 13 (или стробоскопическим методом). При этом в соответствии с фиг. 1 напряжение Uтг тахогенератора 13 через масштабный усилитель 12 и усилитель стабилизации 9 подается на стабилизирующий мотор 10-11, который, создавая момент, вызывает прецессию вектора кинетического момента  вперед по направлению движения.
вперед по направлению движения.
3. Контур имитации влияния центростремительного ускорения начнет формировать выходной сигнал Uбy блока умножения 20 после включения вращения платформы с угловой скоростью виража ωв. Если параметры контура имитации и скоростной коррекции выбраны правильно, то системный датчик угла 16-17 покажет напряжение Ucдy в заданных пределах (минимальный сигнал). Если нет, то требуется настройка контура скоростной коррекции рукояткой Рv масштабного усилителя 12 и контура имитации центростремительного ускорения рукояткой РА блока умножения.
4. Настройка контура имитации влияния центростремительного ускорения.
Для настройки этого контура необходимо сформировать его эквивалентное воздействие на датчик моментов 5-6, что в свою очередь эквивалентно формированию дополнительного напряжения, аналогичного напряжению с МДУ 3 при действии реального ацс, но на блоке умножения 20. При этом в соответствии с фиг. 1 можно записать
где Kмду,Kтг,Kбу,Kдус - коэффициенты передачи маятникового датчика угла, тахогенератора, блока умножения и датчика угловых скоростей.
Так как на вираже при скоростях движения путеизмерителя (60-80) км/час отклонение МДУ от местной вертикали составляет единицы градусов, то выражение (3) приобретает вид
Из соотношения (4) следует, что для выполнения равенства (3) наиболее рационально сделать регулируемым коэффициент передачи блока умножения 20 - Kбу, что на фиг. 1 отражено регулировочным элементом РА на блоке 20.
Практически регулировка будет происходить следующим образом:
• вычисляют напряжение Uмду(ацс)по формуле  для заданного режима движения;
для заданного режима движения;
• включают вращение платформы 18 МПУ-1 с угловой скоростью ωв;
• имитируют вращение колесной пары с помощью двигателя 14 по сигналу задатчика скорости 15;
• измеряют напряжение Uбу на выходе блока умножения 20 и путем регулировочного элемента РА доводят его до вычисленного значения Uмду(ацс).
5. Настройка контура скоростной коррекции.
Это основная часть задачи настройки, которая состоит в обеспечении выполнения условия (2), которое изначально может не выполняться в силу разброса параметров.
Рассмотрим момент, создаваемый стабилизирующим мотором 10-11 в соответствии с фиг. 1.

где S=qKсмKycKдуп - крутизна контура стабилизации;
 - коэффициент скоростной коррекции;
- коэффициент скоростной коррекции;
q,Kсм,Kус,Kдуп,Kму - коэффициенты передачи редуктора, стабилизирующего мотора, усилителя стабилизации, датчика углов прецессии, масштабного усилителя.
Подставляя полученные значения S и N выражение (2), получим

из которого определяем значение коэффициента передачи масштабного усилителя 12

Подставив в (5) расчетные значения параметров, получим расчетное значение коэффициента передачи масштабного усилителя
где верхний индекс «р» соответствует расчетным значениям параметров.
С учетом того, что действительные параметры всегда отличаются от расчетных, проводят настройку контура скоростной коррекции в такой последовательности:
• отключить блок умножения 20 и масштабный усилитель 12 от усилителей 4 и 9;
• измерить через некоторое время (приблизительно 30 с) напряжение U системного датчика угла 16-17 (в пересчете на угловую меру соответствует 2-4 угл. минутам);
• подключить блок умножения 20 и масштабный усилитель 12 к усилителям 4 и 9;
• с помощью рукоятки PV выставляем расчетное значение 
• подаем питание на двигатель 14 и включаем вращение платформы 18 МПУ-1 с параметрами пункта 4;
• если напряжение Uсду системного датчика угла 16-17 не соответствует в угловой мере 2-4 угл. минутам ±10%, то ручкой PV изменяют таким образом, чтобы напряжение Uсду попало в заданный диапазон, что будет говорить о том, что контур скоростной коррекции настроен.
Таким образом, используя минимальный набор технических средств, который будет использоваться для каждого ОСГГС, произведена настройка контура скоростной коррекции в лабораторных условиях.
Такой подход позволяет:
1. До установки ОСГГС на путеизмеритель обеспечить настройку контура скоростной коррекции, которая гарантирует заданную точность работы в реальных условиях при движении на поворотах - ответственном участке пути.
2. Исследовать влияние параметров движения путеизмерителя в лабораторных условиях, что поможет оценить влияние реального разброса параметров на точность работы контура скоростной коррекции.
3. Так как настройка происходит в лабораторных, то значительно снижается трудоемкость работ по подготовке установки гиростабилизатора в рабочем состоянии на путеизмеритель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1972 |
|
SU355494A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
Изобретение относится к измерительной технике и может быть использовано для настройки и анализа точности работы одноосного силового горизонтального гиростабилизатора с имитацией его движения на вираже в лабораторных условиях. Установка включает одноосный горизонтальный гиростабилизатор, установленный на поворотную платформу (18) и имеющий гироузел (1) с вертикальной осью ротора в кардановом подвесе, цепь межрамочной коррекции, цепь приведения и контур имитации влияния центростремительного ускорения. Цепь межрамочной коррекции состоит из датчика угла прецессии (7, 8), подключенного на первый вход усилителя стабилизации (9), второй вход которого соединен с датчиком линейной скорости объекта, состоящим из последовательно соединенных тахогенератора (13) и масштабного усилителя (12), а его выход подключен к стабилизирующему мотору (10, 11), установленному на наружной оси, с которой кинематически связан системный датчик угла (16, 17). Цепь приведения содержит маятниковый датчик угла (МДУ) (3), выход которого подключен на первый вход усилителя коррекции (4), соединенного с датчиком момента (5, 6). Контур имитации влияния центростремительного ускорения состоит из датчика угловой скорости (19), закрепленного на поворотной платформе (18) с входной осью, параллельной оси ее вращения, блока умножения (20), выход которого подключен на второй вход усилителя коррекции (4), при этом первый вход блока умножения соединен с выходом датчика угловой скорости (19), а второй вход - с выходом тахогенератора (13), который кинематически соединен с двигателем (14), на вход которого подключен задатчик линейной скорости (15). Для настройки цепи компенсации центр масс МДУ выставляют строго по оси вращения платформы, а действие центростремительного ускорения имитируется по сигналу с тахогенератора и датчика угловых скоростей. Контроль настройки происходит по сигналу системного датчика угла (16, 17). Технический результат - повышение точности настройки контура скоростной коррекции в лабораторных условиях с меньшей трудоемкостью. 1 ил.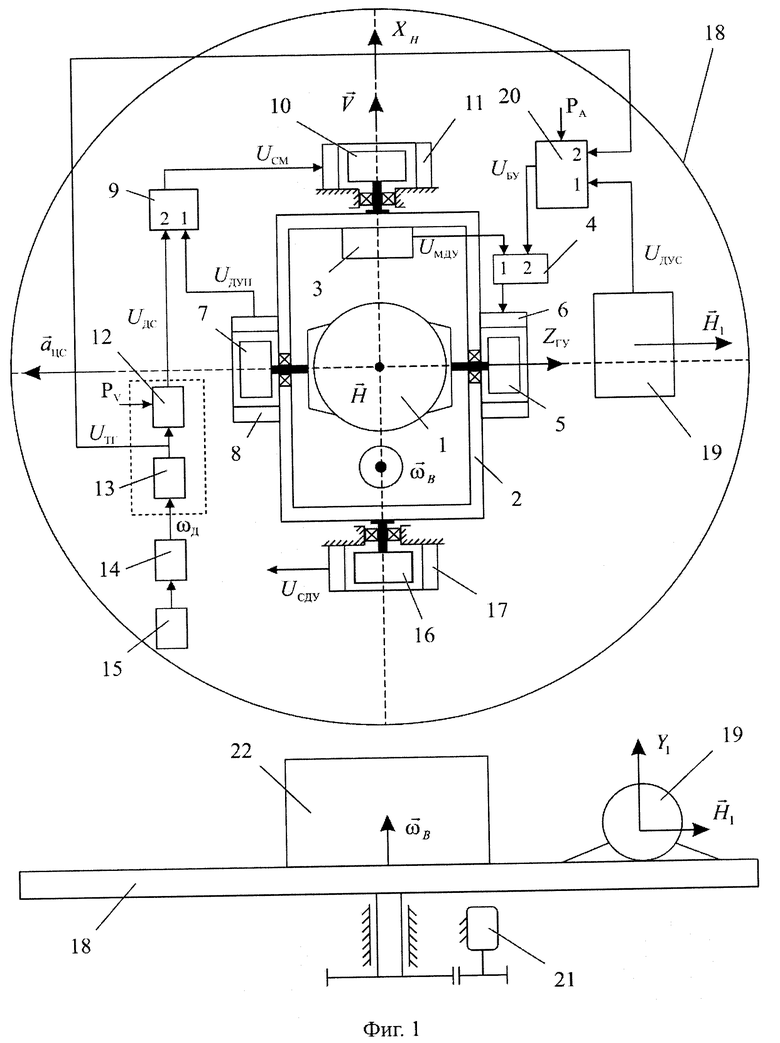
Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях, содержащая одноосный силовой горизонтальный гиростабилизатор с вертикальной осью ротора в кардановом подвесе, включающий цепь межрамочной коррекции, состоящую из последовательно соединенных датчика угла прецессии на внутренней оси подвеса, усилителя стабилизации, на первый вход которого подключен выход датчика угла прецессии, а на второй - выход датчика линейной скорости объекта, состоящий из последовательно соединенных тахогенератора и масштабного усилителя, а выход усилителя стабилизации соединен с двигателем, установленным на наружной оси подвеса, с которой кинематически связан системный датчик угла, и цепь приведения, включающую последовательно соединенные маятниковый датчик угла, установленный на наружной оси подвеса и подключенный на первый вход усилителя коррекции, выход которого соединен с датчиком момента, установленным на внутренней оси подвеса, отличающаяся тем, что в нее введены поворотная платформа и контур имитации влияния центростремительного ускорения, состоящий из датчика угловой скорости, закрепленного на поворотной платформе с входной осью, параллельной оси ее вращения, блок умножения, выход которого подключен на второй вход усилителя коррекции, при этом первый вход блока умножения соединен с выходом датчика угловой скорости, а второй вход - с выходом тахогенератора, который кинематически соединен с двигателем, имитирующим вращение колесной пары, на вход которого подключен задатчик линейной скорости объекта.
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1999 |
|
RU2213327C2 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОДНООСНОГО СИЛОВОГО СТАБИЛИЗАТОРА | 1989 |
|
RU2022362C1 |
| Способ получения продуктов конденсации сульфоароматических жирных кислот с альдегидами | 1924 |
|
SU8801A1 |
| US 7469479 B2, 30.12.2008. | |||

