Изобретение относится к транспортному машиностроению и, в частности, может быть использовано в самоходных машинах, колесно-гусеничных тягачах и транспортерах.
Известен способ поворота трехосного автомобиля изменением положения управляемых колес передней и задней осей [Армейские автомобили. Теория. Учебник / А.С.Антонов, Ю.А.Кононович, Е.И.Магидович, и др. Под общ. ред. А.С.Антонова. - М.: Воениздат, 1970. - С.328].
Недостатком данного способа является неточность регулирования траектории криволинейного движения полноприводного транспортного средства в тяжелых дорожных условиях, особенно при использовании на средней оси гусеничного движителя. При повороте колесно-гусеничного тягача с передними и задними управляемыми колесами в условиях недостаточного сцепления с опорной поверхностью неуправляемый гусеничный движитель, обладая лучшими сцепными свойствами, значительно увеличивает радиус поворота, резко ухудшая маневренные свойства тягача.
Известен динамический способ поворота гусеничной машины за счет разности скоростей движения двух гусениц [Васильченков В.Ф. Автомобили и гусеничные машины. Теория эксплуатационных свойств. Учебник. - Рыбинск: Издание АООТ «РДП» - АРП, 1996. - С.323].
Недостатком данного способа является значительное увеличение необходимой для поворота мощности из-за резкого возрастания момента сопротивления повороту, а также при одновременном использовании колесного и гусеничного движителей несогласованность разности скоростей гусениц углам поворота управляемых колес, что отрицательно сказывается на кинематике поворота колесно-гусеничного транспортного средства и вызывает повышенный износ шин и увеличение нагрузок на элементы силового привода.
Наиболее близким способом, выбранным в качестве прототипа, является комбинированный способ поворота многоосного транспортного средства посредством поворота управляемых колес с односторонним торможением неуправляемых колес [Чайковский И.П., Соломатин П.А. Рулевые управления автомобилей. - М.: Машиностроение, 1987. - С.22].
Недостатками данного способа являются существенные потери мощности на торможение неуправляемых колес, повышенный износ шин, а также невозможность сохранения при повороте скорости прямолинейного движения.
Технический результат направлен на улучшение управляемости колесно-гусеничного транспортного средства за счет кинематически согласованного взаимодействия колесного и гусеничного движителей при движении по криволинейной траектории, обеспечивающего совпадение их центров поворота в процессе одновременной реализации колесной и бортовой схем поворота, а также повышения точности регулирования поворота вовлечением гусеничного движителя в процесс формирования поворачивающих усилий.
Технический результат достигается тем, что поворот колесно-гусеничного транспортного средства осуществляется за счет поворота управляемых колес передней и задней осей с одновременным изменением скоростей движения гусениц, при этом разница скоростей забегающей и отстающей гусениц определяется положением единого для колес и гусениц органа управления, а текущие значения перемещения элементов рулевого привода регистрируются в согласующем устройстве, которое с учетом скорости движения центра масс транспортного средства формирует управляющее воздействие на блок регулирования бесступенчатого механизма поворота, обеспечивающего значения скоростей движения забегающей и отстающей гусениц, необходимые для совпадения центров поворота колесного и гусеничного движителей.
Отличительным признаком от прототипа является то, что с целью улучшения управляемости колесно-гусеничного транспортного средства за счет обеспечения кинематически согласованного взаимодействия колесного и гусеничного движителей при движении по криволинейной траектории текущие значения перемещения элементов рулевого привода регистрируются в согласующем устройстве, которое с учетом скорости движения центра масс транспортного средства формирует управляющее воздействие на блок регулирования бесступенчатого механизма поворота, обеспечивающего значения скоростей движения забегающей и отстающей гусениц, необходимые для совпадения центров поворота колесного и гусеничного движителей.
На чертеже представлена схема реализации способа поворота колесно-гусеничного транспортного средства.
Для осуществления способа поворота колесно-гусеничного транспортного средства используются рулевая колонка с органом управления 1, рулевой механизм 2, рулевой привод управляемых колес, связанный через согласующее устройство 3 с бесступенчатым механизмом поворота гусеничного движителя 4.
Способ реализуется следующим образом.
При необходимости совершения поворота водитель изменяет положение органа управления (рулевого колеса) 1, воздействуя тем самым через рулевой механизм 2 на элементы рулевого привода, в результате чего управляемые колеса поворачиваются на соответствующие углы. В то же время текущие значения перемещения элементов рулевого привода регистрируются в согласующем устройстве 3, которое с учетом скорости движения центра масс машины (Vцм) формирует управляющее воздействие на блок регулирования бесступенчатого механизма поворота 4, обеспечивающего значения скоростей движения забегающей (Vзаб) и отстающей (Vотс) гусениц, необходимые для совпадения центров поворота колесного и гусеничного движителей.
Предлагаемый способ позволит улучшить управляемость колесно-гусеничного транспортного средства вследствие обеспечения кинематически согласованного взаимодействия колесного и гусеничного движителей при повороте, повысить точность регулирования поворота вовлечением гусеничного движителя в процесс формирования поворачивающих усилий, а также облегчить работу водителя за счет управления колесным и гусеничным движителями от единого органа управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВОРОТА МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2309868C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С БОРТОВЫМИ КОРОБКАМИ ПЕРЕДАЧ | 2009 |
|
RU2412847C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1992 |
|
RU2026226C1 |
| ВАРИАТОРНЫЙ МЕХАНИЗМ ПОВОРОТА САМОХОДНЫХ МАШИН | 2003 |
|
RU2240246C1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| Гусеничная машина | 2019 |
|
RU2710511C1 |
| Гусеничная машина | 2019 |
|
RU2711105C1 |
| ГУСЕНИЧНАЯ МАШИНА | 2000 |
|
RU2211166C2 |
| СПОСОБ ПОВОРОТА ДВИЖИТЕЛЯМИ И УСТРОЙСТВО РУЛЕВОЕ ТРАКТОРА | 2010 |
|
RU2430851C1 |
| Трансмиссия гусеничного транспортного средства | 1989 |
|
SU1691207A1 |
Изобретение относится к транспортному машиностроению и, в частности, может быть использовано в самоходных машинах, колесно-гусеничных тягачах и транспортерах. Способ поворота осуществляется за счет поворота управляемых колес передней и задней осей с одновременным изменением скоростей движения гусениц. При этом разница скоростей забегающей и отстающей гусениц определяется положением единого для колес и гусениц органа управления. Текущие значения перемещения элементов рулевого привода регистрируются в согласующем устройстве. Согласующее устройство с учетом скорости движения центра масс транспортного средства формирует управляющее воздействие на блок регулирования бесступенчатого механизма поворота. Блок регулирования обеспечивает значения скоростей движения забегающей и отстающей гусениц, необходимые для совпадения центров поворота колесного и гусеничного движителей. Технический результат направлен на улучшение управляемости колесно-гусеничного транспортного средства, повышение точности регулирования поворота. 1 ил.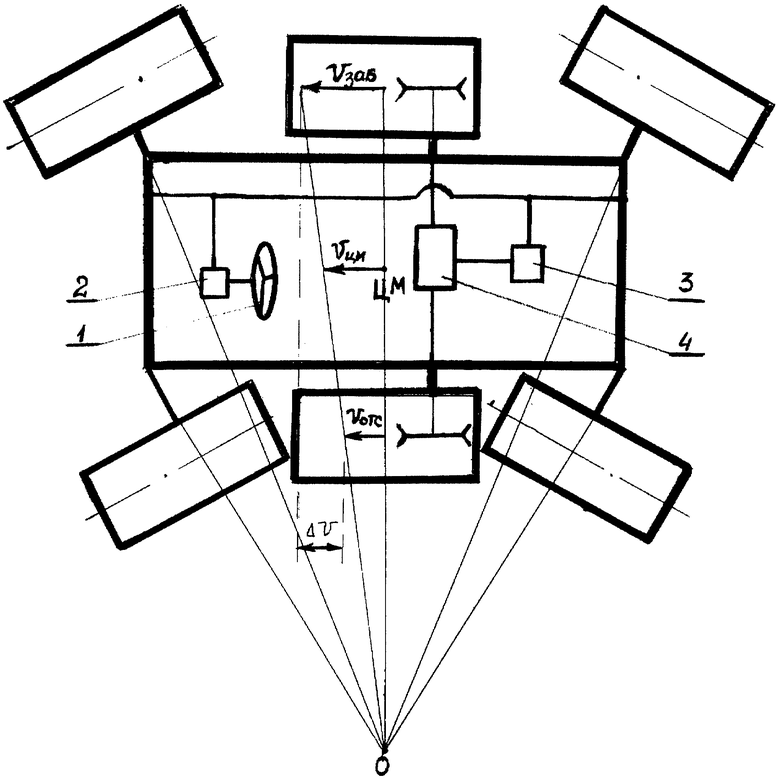
Способ поворота колесно-гусеничного транспортного средства за счет поворота управляемых колес передней и задней осей с одновременным изменением скоростей движения гусениц, при этом разница скоростей забегающей и отстающей гусениц определяется положением единого для колес и гусениц органа управления, отличающийся тем, что текущие значения перемещения элементов рулевого привода регистрируются в согласующем устройстве, которое с учетом скорости движения центра масс транспортного средства формирует управляющее воздействие на блок регулирования бесступенчатого механизма поворота, обеспечивающего значения скоростей движения забегающей и отстающей гусениц, необходимые для совпадения центров поворота колесного и гусеничного движителей.
| ВАРИАТОРНЫЙ МЕХАНИЗМ ПОВОРОТА САМОХОДНЫХ МАШИН | 2003 |
|
RU2240246C1 |
| JP 2003237618 А, 27.08.2003 | |||
| US 5975224 А, 02.11.1999 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРОИЗВОДНЫХ 7,8-ФТАЛОИЛАКРИДОНА | 2007 |
|
RU2332407C1 |

