Изобретение относится к транспортному машиностроению и может быть использовано в самоходных машинах, колесных и колесно-гусеничных тягачах и транспортерах.
Известен способ поворота трехосного автомобиля изменением положения управляемых колес передней и задней осей [Армейские автомобили. Теория. Учебник / А.С.Антонов, Ю.А.Кононович, Е.И.Магидович и др. Под общ. ред. А.С.Антонова. - М.: Воениздат, 1970. - С.328].
Недостатком данного способа является неточность регулирования траектории криволинейного движения полноприводного транспортного средства в тяжелых дорожных условиях. Помимо этого, использование указанного способа вызывает увеличение боковых реакций на среднюю ось автомобиля, что увеличивает радиус поворота и ухудшает маневренность.
Известен динамический (силовой) способ поворота транспортного средства за счет регулирования разницы скоростей колес (гусеничных модулей) различных бортов без изменения их положения относительно корпуса [Васильченков В.Ф. Автомобили и гусеничные машины. Теория эксплуатационных свойств. Учебник. - Рыбинск: Издание АООТ «РДП» - АРП, 1996. - С.323].
Недостатками данного способа является значительное увеличение требуемой для поворота мощности из-за резкого возрастания момента сопротивления повороту, необходимость использования дорогостоящих устройств для регулирования угловых скоростей колес (гусеничных модулей), а также повышенный износ шин и увеличение нагрузок на элементы силового привода.
Наиболее близким способом, выбранным в качестве прототипа, является способ поворота трехосного транспортного средства посредством поворота управляемых колес с одновременным подъемом и фиксацией неуправляемых колес средней оси [Чайковский И.П., Соломатин П.А. Рулевые управления автомобилей. - М.: Машиностроение, 1987. - С.22].
Недостатками данного способа являются существенное снижение суммарных тяговых усилий при движении по труднопроходимой местности и, как следствие, значительное ухудшение проходимости транспортного средства.
Технический результат направлен на повышение маневренности многоопорного транспортного средства за счет вовлечения неуправляемых ведущих колес (гусеничных модулей) в процесс формирования поворачивающего момента посредством регулирования приходящейся на них вертикальной нагрузки.
Технический результат достигается тем, что поворот многоопорного транспортного средства осуществляется за счет поворота управляемых колес с одновременным изменением тяговых усилий на неуправляемых колесах или гусеничных модулях, при этом разницу тяговых усилий на забегающих и отстающих неуправляемых ведущих колесах или гусеничных модулях формирует согласующее устройство, которое с учетом перемещения элементов рулевого привода, скорости движения центра масс машины и действительного значения коэффициента сцепления неуправляемых ведущих колес или гусеничных модулей с опорной поверхностью формирует управляющее воздействие на механизм поднятия и опускания неуправляемого ведущего колеса или гусеничного модуля, внутреннего по отношению к центру поворота.
Отличительным признаком от прототипа является то, что с целью повышения маневренности многоопорного транспортного средства в процессе формирования поворачивающего момента участвуют неуправляемые ведущие колеса или гусеничные модули путем создания разницы тяговых усилий на забегающих и отстающих неуправляемых ведущих колесах или гусеничных модулях, определяемой уменьшением вертикальной нагрузки, приходящейся на неуправляемые ведущие колеса или гусеничные модули внутреннего по отношению к центру поворота борта, причем разницу тяговых усилий на забегающих и отстающих неуправляемых ведущих колесах или гусеничных модулях формирует согласующее устройство, которое с учетом перемещения элементов рулевого привода, скорости движения центра масс машины и действительного значения коэффициента сцепления неуправляемых ведущих колес или гусеничных модулей с опорной поверхностью формирует управляющее воздействие на механизм поднятия и опускания неуправляемого ведущего колеса или гусеничного модуля, внутреннего по отношению к центру поворота.
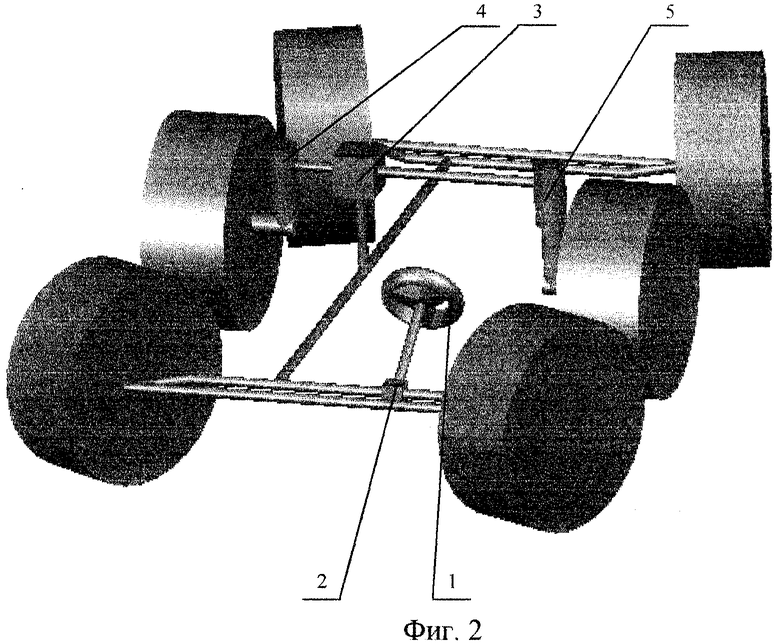
На фиг.1 представлена схема формирования дополнительного поворачивающего момента для случая трехосного транспортного средства с передними и задними управляемыми колесами.
На фиг.2 представлена схема реализации способа поворота многоопорного транспортного средства.
Формирование поворачивающего момента осуществляется посредством разницы тяговых усилий на неуправляемых ведущих колесах или гусеничных модулях.
Для случая использования в качестве неуправляемых элементов движителя колес значения сил тяги определяются выражением:

где Рi - сила тяги на колесе соответствующего борта, Н;
ϕ - коэффициент сцепления;
Gi - сила тяжести (нагрузка), действующая на опорную поверхность со стороны колеса.
Для гусеничного движителя:

где μ - коэффициент сопротивления повороту;
Gi - сила тяжести (нагрузка), действующая на опорную поверхность со стороны гусеницы;
Lг - длина опорной поверхности гусеницы, м;
Вг - ширина опорной поверхности гусеницы, м.
Разница сил тяги по бортам:

способствует созданию дополнительного поворачивающего момента со стороны неуправляемых колес.
Основной поворачивающий момент (Мпов ук) (фиг.1) формируется за счет действия равнодействующих, представляющих собой векторную сумму проекций на поперечную ось У сил тяги на управляемых колесах передней (Рк1 заб и Рк1 отст) и задней (Рк2 заб и Рк2 отст) осей на плече, равном базе машины (L).
Дополнительный поворачивающий момент (Мпов доп) формируется за счет действия силы ΔР, представляющей собой разницу сил тяги на забегающем (Рзаб) и отстающем (Ротст) элементах неуправляемого движителя на плече, равном колее машины (В).
Для осуществления способа поворота многоопорного транспортного средства используются рулевая колонка с органом управления 1 (фиг.2), рулевой механизм 2, рулевой привод управляемых колес, связанный через согласующее устройство 3 с механизмами подъема и опускания неуправляемых ведущих колес (гусеничных модулей) 4 и 5.
Способ реализуется следующим образом.
При совершении поворота водитель изменяет положение органа управления (рулевого колеса) 1, воздействуя тем самым через рулевой механизм 2 на элементы рулевого привода, в результате чего управляемые колеса поворачиваются на соответствующие углы. В то же время текущие значения перемещения элементов рулевого привода регистрируются в согласующем устройстве 3, которое с учетом скорости движения центра масс машины и действительным значением коэффициента сцепления элементов движителя с опорной поверхностью формирует управляющее воздействие на механизм поднятия и опускания неуправляемых ведущих колес (гусеничных модулей) внутреннего (по отношению к центру поворота) борта 4 или 5, обеспечивая уменьшение вертикальной нагрузки на этих колесах (гусеничных модулях) таким образом, что создаваемая разница тяговых усилий по бортам, обеспечивающая создание дополнительного поворачивающего момента, пропорциональна углам поворота управляемых колес.
Предлагаемый способ позволит повысить маневренность многоопорного транспортного средства при движении по труднопроходимой местности вследствие вовлечения неуправляемых ведущих колес (гусеничных модулей) в процесс формирования поворачивающего момента посредством регулирования приходящейся на них вертикальной нагрузки, обеспечить кинематически согласованное взаимодействие всех колес (гусеничных модулей) при повороте, избежать необходимость применения устройств для регулирования угловых скоростей колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВОРОТА КОЛЕСНО-ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2316443C2 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С БОРТОВЫМИ КОРОБКАМИ ПЕРЕДАЧ | 2009 |
|
RU2412847C1 |
| Гусеничная машина | 2019 |
|
RU2711105C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2299146C1 |
| Гусеничная машина | 2019 |
|
RU2710511C1 |
| БЕССТУПЕНЧАТЫЙ МЕХАНИЗМ ПОВОРОТА БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2003 |
|
RU2233760C1 |
| ЭКОЛОГИЧНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2152888C1 |
| ГУСЕНИЧНАЯ МАШИНА | 2000 |
|
RU2211166C2 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
Изобретение относится к транспортному машиностроению и может быть использовано в самоходных машинах, колесных и колесно-гусеничных тягачах и транспортерах. Поворот многоопорного транспортного средства осуществляется за счет поворота управляемых колес с одновременным изменением тяговых усилий на неуправляемых ведущих колесах или гусеничных модулях. Разницу тяговых усилий на забегающих и отстающих неуправляемых ведущих колесах или гусеничных модулях формирует согласующее устройство, которое с учетом перемещения элементов рулевого привода, скорости движения центра масс машины и действительного значения коэффициента сцепления неуправляемых ведущих колес или гусеничных модулей с опорной поверхностью формирует управляющее воздействие на механизм поднятия и опускания неуправляемого ведущего колеса или гусеничного модуля, внутреннего по отношению к центру поворота. Технический результат заключается в повышении маневренности многоопорного транспортного средства. 2 ил.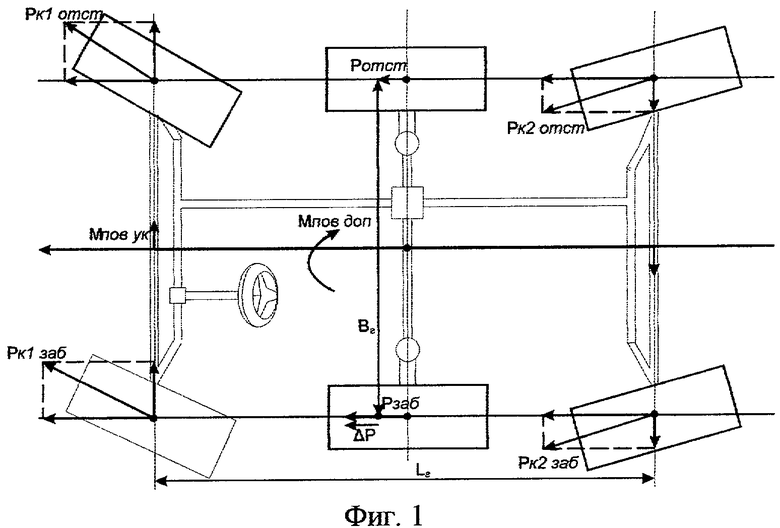
Способ поворота многоопорного транспортного средства за счет поворота управляемых колес с одновременным изменением тяговых усилий на неуправляемых колесах или гусеничных модулях, отличающийся тем, что в процессе формирования поворачивающего момента участвуют неуправляемые ведущие колеса или гусеничные модули путем создания разницы тяговых усилий на забегающих и отстающих неуправляемых ведущих колесах или гусеничных модулях, определяемой уменьшением вертикальной нагрузки, приходящейся на неуправляемые ведущие колеса или гусеничные модули внутреннего по отношению к центру поворота борта, причем разницу тяговых усилий на забегающих и отстающих неуправляемых ведущих колесах или гусеничных модулях формирует согласующее устройство, которое с учетом перемещения элементов рулевого привода, скорости движения центра масс машины и действительного значения коэффициента сцепления неуправляемых ведущих колес или гусеничных модулей с опорной поверхностью формирует управляющее воздействие на механизм поднятия и опускания неуправляемого ведущего колеса или гусеничного модуля, внутреннего по отношению к центру поворота.
| ЧАЙКОВСКИЙ И.П., СОЛОМАТИН П.А | |||
| Рулевые управления автомобилей | |||
| - М.: МАШИНОСТРОЕНИЕ, 1987, с.22 | |||
| Механизм поворота транспортногоСРЕдСТВА | 1979 |
|
SU816843A1 |
| Способ поворота одногусеничной машины с опорными поворотными колесами | 1972 |
|
SU668842A1 |
| Способ поворота многоосного транспортного средства | 1990 |
|
SU1751026A1 |
| Способ поворота многоопорного транспортного средства на месте | 1976 |
|
SU562457A1 |
| Способ поворота многоопорного колесно-шагающего транспортного средства | 1975 |
|
SU522987A1 |
| Механизм поворота гусеничных машин | 1959 |
|
SU125149A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1969 |
|
SU412839A1 |

