Изобретение относится к системам автоматического управления и может быть использовано в образцах техники в качестве комплексных средств контроля, а также в установках для научных исследований.
Известен способ контроля параметров управляемой ракеты, приведенный в описании патента [Патент 2243494 от 19.03.2003, МПК 7 F42В 15/00, 35/00, G05В 23/00 (прототип)], включающий задание сигналов, имитирующих отклонения ракеты, модуляцию их сигналами частотой вращения ракеты по углу крена и подачу на вход приемного тракта ракеты, сравнение выходных команд управления с предварительно заданными значениями, соответствующими имитирующим сигналам, и оценку по результатам сравнения соответствия контролируемого параметра заданному значению.
Система контроля параметров управляемой ракеты для осуществления указанного способа, выбранная в качестве прототипа [Патент 2243494 от 19.03.2003, МКИ 7 F42В 15/00, 35/00, G05В 23/00 (прототип)], содержит последовательно соединенные блок формирования модулированного излучения, состоящий из имитатора командных сообщений, имитатора сигнала вращения ракеты и оптронных пар светодиодов-фотодиодов, и блок аппаратуры управления ракеты, включающий приемник, аппаратуру разделения каналов и декодирования, преобразователь команд с датчика крена и рулевой привод, а также блок контроля.
Известный способ и система контроля позволяют определять соответствие контролируемых параметров аппаратуры управления ракеты требуемым значениям с определенным допуском по отклонению сигналов на выходе проверяемой аппаратуры при конкретном заранее заданном виде входного сигнала.
Общим недостатком указанных технических решений является низкая достоверность оценки параметров ракеты при работе разомкнутой системы в условиях помех и отработки управляющих воздействий, так как не позволяет оценить влияние отклонений параметров на выходные характеристики системы, т.е. не учитывает реальную динамику ракеты. При таком способе контроля возможна:
в случае назначения узкого допуска на выходные сигналы с контролируемых блоков - необоснованная отбраковка ракет (аппаратурных блоков);
в случае назначения широкого допуска на выходные сигналы с контролируемых блоков - признание годными ракет (аппаратурных блоков), в процессе полета которых будет происходить ухудшение качества процесса наведения относительно заданного, а следовательно, ухудшение точности и коэффициента лобового сопротивления при увеличенных углах атаки и скольжения ракеты.
Задачей изобретения является повышение достоверности контроля параметров ракеты в условиях работы всей системы управления, в том числе при наличии возмущающих воздействий и помех.
Решение поставленной задачи достигается тем, что в способе контроля параметров управляемой ракеты, включающем задание имитирующих команд в виде модулированного излучения, его подачу на вход приемного тракта ракеты и оценку параметров управляемой ракеты путем сравнения сигнала с выхода аппаратуры управления ракеты с заданным, осуществляют расчет пространственного движения ракеты по сигналам с выхода аппаратуры управления ракеты, ее отклонения относительно точки прицеливания, формируют модулированное излучение в соответствии с полученными отклонениями ракеты, а сравнение контролируемых параметров с заданными значениями производят по рассчитанным сигналам пространственного положения ракеты путем сравнения отклонений и углов атаки и скольжения или только отклонений ракеты с заданными значениями.
В автоматизированную систему контроля параметров управляемой ракеты, состоящую из последовательно соединенных блока формирования модулированного излучения и блока аппаратуры управления ракеты, введен вычислительный блок, вход которого соединен с выходом блока аппаратуры управления, а выход соединен со входом блока формирования модулированного излучения.
В варианте реализации блока формирования модулированного излучения он содержит последовательно соединенные прибор-прицел наведения и блок управляемых зеркал, оптически связанные с блоком аппаратуры управления ракеты, причем второй вход блока управляемых зеркал соединен с выходом вычислительного блока.
В заявляемых технических решениях предлагается обеспечить повышение достоверности оценки параметров ракеты путем расчета динамики пространственного движения ракеты и сравнения получаемых отклонений выходных координат и углов атаки и скольжения или только отклонений ракеты с заданными значениями при допусках, в пределах которых не происходит ухудшения точности и коэффициента лобового сопротивления ракеты.
Предлагаемое техническое решение поясняется чертежами, где фиг.1 изображает реализацию автоматизированной системы контроля параметров управляемой ракеты, фиг.2 изображает реализацию блока формирования модулированного излучения.
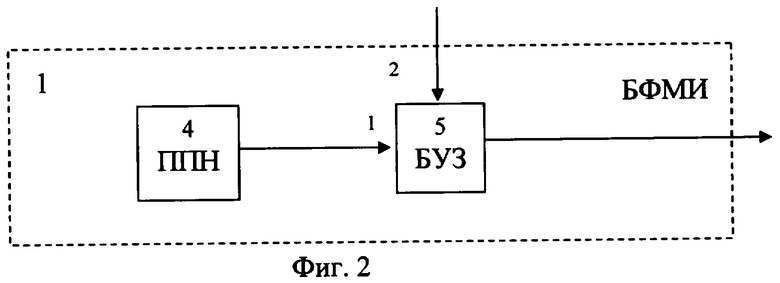
Реализация автоматизированной системы контроля параметров управляемой ракеты поясняется фиг.1, на которой обозначено: 1 - блок формирования модулированного излучения (БФМИ); 2 - блок аппаратуры управления (БАУ); 3 - вычислительный блок (ВБ).
Реализацию блока формирования модулированного излучения 1 поясняет фиг.2, на которой обозначено: 4 - прибор-прицел наведения (ППН); 5 - блок управляемых зеркал (БУЗ).
Блок 2 представляет собой последовательно соединенные приемник излучения (см. [2] стр.82...136) и формирователь команд управления (см. [3] стр.366...371, рис.7.15).
Вычислительный блок 3 представляет собой микропроцессорную систему с устройством ввода и вывода сигналов (см. [4], стр.195...223, рис.2.16, рис.2.22), в котором решаются уравнения пространственного движения ракеты, включающие уравнения рулевого привода, уравнения планера и кинематические уравнения (см. [3] стр.76...124, 183...199).
Прибор-прицел наведения 4 представляет собой оптико-электронный излучатель с пространственно-кодированным лучом (см. [2] стр.5...25, рис.1.8).
Блок управляемых зеркал 5 представляет собой зеркало, установленное на оси управляемого привода (см. [5] стр.91-98 рис.4.8).
Вновь вводимые блоки реализуются на базе элементов, являющихся стандартными и выпускаемыми промышленностью со стандартной точностью.
Автоматизированная система контроля параметров управляемой ракеты, реализующая предлагаемый способ, работает следующим образом.
На выходе устройства 1 формируется команда в виде модулированного излучения. Этот оптический сигнал поступает на вход блока аппаратуры управления 2 (приемника излучения ракеты). В блоке аппаратуры 2 сигнал с выхода приемника излучения поступает на вход блока формирователя команд управления, на выходе которого формируются управляющие сигналы на рули ракеты. С выхода устройства 2 сигнал поступает на вычислительный блок 3, в котором осуществляется расчет пространственного полета ракеты, в том числе ее отклонения относительно точки прицеливания. Сигнал с выхода вычислительного блока 3 поступает на вход устройства 1.
Устройство 1 имитирует излучение аналогично прототипу [1]. Как вариант устройство 1 может быть реализовано в соответствии с фиг.2. Блок формирования модулированного излучения 1 в этом случае работает следующим образом. Сигнал излучения с выхода прибора-прицела 4 наведения через блок управляемых зеркал 5 поступает на вход приемника излучения блока аппаратуры управления 2. Управление положением зеркал осуществляется в соответствии с величиной отклонения ракеты относительно линии прицеливания, формируемого на выходе вычислительного блока 3. Полученный таким образом сигнал излучения Δε(t) преобразуется в сигнал управления U(t) на выходе блока управления 2. По сигналам управления U(t) в вычислительном блоке 3 определяется изменение пространственного положения ракеты. Направление излучения от прибора-прицела наведения 4 εвх(t) смещается в пространстве, и исходное угловое отклонение Δε(t) между линией прицеливания εвх(t) и выходными расчетными пространственными координатами ракеты εвых(t) уменьшается.
Оценку качества параметров управляемой ракеты производят по расчетному пространственному движению ракеты путем сравнения рассчитываемых отклонений и углов атаки и скольжения или только отклонений ракеты с заданными значениями при допусках, в пределах которых не происходит ухудшения точности и коэффициента лобового сопротивления. Таким образом, обеспечивается контроль параметров управляемой ракеты в составе системы управления с реальными аппаратурными блоками.
В автоматизированной системе контроля повышение достоверности достигается путем:
- формирования на выходе блока 2 сигнала, пропорционального отклонению модулированного излучения относительно линии прицеливания;
- подачей сигнала с выхода блока 2 на вход вычислительного блока 3;
- формирования на выходе вычислительного блока 3 сигналов, пропорциональных расчетным координатам пространственного движения ракеты относительно линии прицеливания, и подачи этих сигналов на второй вход блока управляемых зеркал;
- определенной последовательностью соединения вновь вводимых элементов 3, 4 и 5 и выполнением определенных параметрических соотношений.
Обосновать работу системы управления можно следующим образом.
Передаточная функция замкнутой системы управления по выходным расчетным координатам ракеты имеет вид [см. [6] стр.64...84]:

где Wi(p) - передаточная функция i-го блока,  - оператор дифференцирования по времени.
- оператор дифференцирования по времени.
Передаточной функции (1) предлагаемой автоматизированной системы контроля соответствует передаточная функция реальной системы управления. При этом в оптический тракт устройств 1-2 возможно вводить различные оптические помехи, а в устройстве 3 задавать возмущающие воздействия, в том числе ветер, и разбросы по начальным возмущениям при решении уравнений пространственного движения ракеты.
В замкнутой системе управления наведение ракеты осуществляется по сигналу ошибки. Передаточная функция системы управления по сигналу ошибки имеет вид [см. [6] стр.64...84]:

Формулы (1) и (2) показывают, что ошибка управления в замкнутом контуре наведения меньше, чем при проведении контроля в разомкнутом контуре управления.
Проведение контроля в замкнутой системе позволяет оценить влияние отклонений параметров на выходные характеристики системы, т.е. учитывает реальную динамику ракеты при оценке качества параметров ракеты.
В рассматриваемой системе обеспечивается повышение достоверности оценки качества параметров ракеты за счет проведения проверок в условиях работы всей системы управления с реальными аппаратурными блоками, в том числе при наличии возмущающих воздействий и помех.
Установлено экспериментально, что (1) справедливо, если для отношения коэффициентов передачи элементов системы управления в полосе рабочих частот выполняется зависимость:

где Кi - коэффициент передачи i-го блока.
Значения коэффициентов из диапазона 0,7...1,3 в (3) определяются при настройке каждого конкретного образца системы с целью наиболее полной реализации условия (1) и (2). Это обстоятельство вызвано отличием параметров конкретного образца системы от номинала.
Таким образом, предлагаемый способ контроля параметров управляемой ракеты и автоматизированная система контроля параметров управляемой ракеты для его реализации обеспечивают повышение достоверности проверок путем оценки качества параметров проверяемой аппаратуры по результатам сравнения выходных характеристик системы управления (качества пространственного движения ракеты), а именно отклонений и углов атаки и скольжения или только отклонений, с заданными значениями.
Следовательно, использование новых элементов 3, 4 и 5, соединенных в последовательности в соответствии с фиг.1, 2 с указанными динамическими характеристиками определенными соотношениями (1)-(3) в предлагаемой автоматизированной системе контроля параметров управляемой ракеты выгодно отличает предлагаемое техническое решение от прототипа, так как обеспечивает повышение достоверности оценки параметров ракеты.
СПИСОК ЛИТЕРАТУРЫ
1. Способ контроля параметров управляемой ракеты, вращающейся по крену, и автоматизированная система контроля для его осуществления (варианты). Захаров Л.Г., Копылов Ю.Д., Кузнецов Ю.М., Хандошко Л.П., Землевский О.В. (Россия) Патент 2243494 от 19.03.2003, МКИ 7 F42В 15/00, 35/00, G05В 23/00 (прототип).
2. Оптико-электронные приборы космической аппаратуры. Изнар А.Н., Павлов А.В., Федоров Б.Ф. М.: Машиностроение, 1972.
3. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965.
4. Микропроцессоры. Под ред. Л.Н.Преснухина. В 3-х книгах. Книга 2. Средства сопряжения. Контролирующие и информационно-управляющие системы. М.: Высшая школа, 1987. - 303 с.
5. Основы проектирования лазерных локационных систем. Малашин М.С., Каминский Р.П., Борисов Ю.Б. М.: Высшая школа, 1983.
6. Теория автоматического управления. Под ред. А.А.Воронова - М.: Высшая школа, 1986. - ч.1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539803C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ УПРАВЛЯЕМЫХ РАКЕТ | 2008 |
|
RU2390721C1 |
| ТРЕНАЖЕР ОПЕРАТОРОВ ПУШЕЧНО-РАКЕТНОГО ВООРУЖЕНИЯ | 2011 |
|
RU2465534C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2012 |
|
RU2481541C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539841C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539842C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539822C1 |
Изобретение относится к системам автоматического управления и может быть использовано в образцах техники в качестве комплексных средств контроля, а также в установках для научных исследований. Технический результат - повышение достоверности контроля параметров ракеты в условиях работы всей системы управления, в том числе при наличии возмущающих воздействий и помех. Согласно способу контроля параметров управляемой ракеты задают имитирующие команды в виде модулированного излучения, подают излучение на вход приемного тракта ракеты и производят оценку параметров управляемой ракеты путем сравнения сигнала с выхода аппаратуры управления ракеты с заданным. Осуществляют расчет пространственного движения ракеты по сигналам с выхода аппаратуры управления ракеты, ее отклонения относительно точки прицеливания, формируют модулированное излучение в соответствии с полученными отклонениями ракеты. При этом сравнение контролируемых параметров с заданными значениями производят по рассчитанным сигналам пространственного положения ракеты путем сравнения отклонений и углов атаки и скольжения или только отклонений ракеты с заданными значениями. В автоматизированную систему контроля параметров управляемой ракеты, состоящую из последовательно соединенных блока формирования модулированного излучения и блока аппаратуры управления ракеты, введен вычислительный блок, вход которого соединен с выходом блока аппаратуры управления, а выход соединен со входом блока формирования модулированного излучения. В варианте реализации блока формирования модулированного излучения он содержит последовательно соединенные прибор-прицел наведения и блок управляемых зеркал, оптически связанные с блоком аппаратуры управления ракеты, причем второй вход блока управляемых зеркал соединен с выходом вычислительного блока. 2 н. и 1 з.п. ф-лы, 2 ил.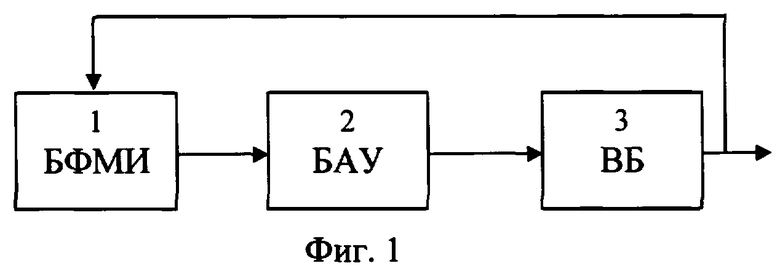
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| Система управления фрикционными гидромуфтами двухпоточной коробки передач транспортного средства | 1988 |
|
SU1532344A1 |
| СПОСОБ ГИБРИДНОЙ ЛАЗЕРНО-ДУГОВОЙ СВАРКИ ДЕТАЛЕЙ ИЗ АЛИТИРОВАННОЙ СТАЛИ С ПРОВОЛОКОЙ, СОДЕРЖАЩЕЙ ОБРАЗУЮЩИЕ ГАММУ-ФАЗУ ЭЛЕМЕНТЫ, И ГАЗОМ, СОДЕРЖАЩИМ МЕНЕЕ 10% АЗОТА ИЛИ КИСЛОРОДА | 2011 |
|
RU2588978C2 |
| DE 3310403 А1, 20.09.1984 | |||
| FR 2064386 А, 23.07.1971. | |||

