Изобретение относится к области разработки систем телеуправления ракетами и может быть использовано в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах.
В настоящее время известен способ наведения управляемой ракеты, реализованный, например, в противотанковых комплексах "Конкурс", "Кастет", "Бастион", "Штурм", "Кобра" (см. Ангельский Р.Д. Отечественные противотанковые комплексы, Москва, ACT, Астрель, 2002 г., с.74-75, 84, 100, 111-114 [1]), включающий ориентирование пускового устройства с ракетой в направлении поля управления, перемещение ракеты в поле управления посредством выстреливания из пускового устройства, последующее отклонение органов управления ракеты пропорционально координатам ракеты в поле управления.
Под полем управления здесь и далее понимается область определения координат ракеты относительно линии прицеливания и это может быть, например, поле зрения пеленгатора ракеты в командной системе управления, реализованной в комплексах "Конкурс", "Штурм", "Кобра" или же информационное поле луча (радиолуча или луча лазера), формируемого прибором наведения в лучевой системе управления ракетой, реализованной в комплексах "Кастет", "Бастион", "Вихрь".
По конструктивным соображениям пусковое устройство в известных комплексах расположено относительно информационной оси прибора наведения с начальным параллаксом в вертикальной и горизонтальной плоскостях.
Под величиной начального параллакса пускового устройства в вертикальной или горизонтальной плоскости здесь и далее будем понимать декартовы координаты Y, Z центра масс ракеты перед стартом в системе координат OXYZ, связанной с информационным полем (ИП) пеленгатора или прибора наведения (ось ОХ направлена вдоль продольной оси ИП в точку прицеливания).
Система наведения, реализующая известный способ, включает обычно: прицел (оптическая ось которого и является линией прицеливания), пусковое устройство (ствол орудия или транспортно-пусковой контейнер), расположенное относительно прицела с начальным параллаксом, аппаратуру определения координат (нулевая ось аппаратуры определения координат совмещена с линией прицеливания), блок формирования команд (БФК) на отклонение рулей ракеты, рули.
Выполнение операций способа происходит следующим образом. Оператор наблюдает за местностью через прицел и, обнаружив цель, совмещает линию прицеливания (оптическую ось прицела) и совпадающую с ней нулевую ось аппаратуры определения координат с точкой прицеливания, выбираемой обычно в контуре цели, после чего производит пуск ракеты.
Встреливание ракеты в поле управления (поле зрения аппаратуры определения координат) осуществляется за счет соответствующей ориентации пускового устройства в направлении поля управления.
Аппаратура определения координат при появлении ракеты в области определения координат определяет координаты ракеты относительно линии прицеливания.
БФК, на вход которого поступают выходные сигналы аппаратуры определения координат, вырабатывает в соответствии с ними команды на отклонение рулей ракеты.
Наиболее близким к предлагаемому является способ наведения управляемой ракеты 9М117 комплекса "Кастет", включающий ориентирование пускового устройства с ракетой в направлении поля управления (области внутри информационного луча лазера) под заданными углами соответственно в вертикальной и горизонтальной плоскостях, перемещение ракеты в поле управления посредством выстреливания из пускового устройства (ствола орудия) и последующее отклонение органов управления ракеты пропорционально координатам ракеты в поле управления (см. "Выстрел 3УБК10 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации", М.: Военное издательство, 1987 г., с.13 [2]).
Система наведения, реализующая этот способ, содержит прицел, оптическая ось которого совпадает с осью информационного луча, представляющего собой луч лазера, промоделированный системой растровых дисков, пусковое устройство (пушка МТ-12), расположенное слева или справа относительно прибора наведения, аппаратуру определения координат ракеты относительно оптической оси прицела, включающую приемник излучения и электронную аппаратуру, блок формирования команд на отклонение рулей, включающий корректирующий фильтр и гирокоординатор, блок рулевых приводов (БРП), замыкатель.
Выполнение операций способа осуществляется следующим образом.
Оператор, обнаружив цель, совмещает линию прицеливания (оптическую ось прицела) и совпадающую с ней нулевую ось аппаратуры определения координат (оптическую ось источника лазерного излучения) с точкой прицеливания и производит пуск ракеты. Перемещение ракеты в поле управления осуществляется посредством выстреливания из ствола противотанковой пушки, ориентированного в направлении поля управления под заданными углами соответственно в вертикальной и горизонтальной плоскостях.
После входа ракеты в поле управления аппаратура определения координат, содержащая приемник излучения, воспринимает частотно-модулированное излучение лазера и, расшифровывая его, определяет координаты ракеты относительно оси лазерного излучателя (т.е. относительно линии прицеливания).
Сигналы, пропорциональные координатам ракеты относительно оси луча, поступают на вход БФК, вырабатывающего в соответствии с ним команды на отклонение рулей.
Рули БРП, отклоняясь относительно своего среднего положения, создают действующий на ракету управляющий момент. Это, в свою очередь, приводит к возникновению управляющих сил, которые удерживают ракету около центра поля управления в течение всего времени полета ракеты до цели.
Недостатком известного способа наведения ракеты является низкая точность при стрельбе в ближней зоне возможных атак при начальных параллаксах пусковой установки в вертикальной или (и) горизонтальной плоскости, превышающих 1.5…2 м. Это обусловлено тем, что с момента попадания ракеты, стартующей с начальным параллаксом, в ИП в контуре управления ракетой возникает переходный процесс по выводу ракеты на ось ИП с имеющегося начального отклонения.
Указанный переходный процесс носит, как правило, колебательный характер, т.е. центр масс ракеты периодически отклоняется от оси ИП в ту и другую сторону, вследствие чего возможен промах ракеты при стрельбе в ближней зоне. Степень затухания указанных колебаний, а также время переходного процесса в большой степени зависят от динамических характеристик планера ракеты (располагаемой перегрузки, собственной частоты и относительного коэффициента демпфирования), которые на начальном участке полета, когда ракета, как правило, только набирает скорость, могут быть достаточно низкими, и, вследствие этого, обеспечить приемлемое качество переходного процесса подбором соответствующих корректирующих устройств не представляется возможным.
Уменьшить начальное отклонение ракеты от оси ИП можно путем соответствующей ориентации продольной оси ракеты перед стартом (увеличением угла подхода ракеты к лучу), однако в этом случае существует опасность "проскакивания" ракетой луча и, следовательно, срыва наведения (М.В.Максимов, Г.И.Горгонов. Радиоуправление ракетами, М.: Советское радио, 1964, с.172-173 [4]).
Задачей предлагаемого изобретения является повышение точности наведения управляемой ракеты на стартовом участке. Поставленная задача достигается за счет того, что в известном способе наведения телеуправляемой ракеты, выстреливаемой из пускового устройства, расположенного с начальным параллаксом относительно прибора наведения, включающем ориентирование пускового устройства с ракетой в направлении поля управления, формирование сигналов управления, пропорциональных координатам отклонения ракеты от оси поля управления в вертикальной и горизонтальной плоскостях, и отклонение органов управления ракеты соответственно сформированным сигналам управления, формируют программные команды управления, пропорциональные величине начального параллакса, которые вычитают из сигналов управления ракетой. Величина программных команд изменяется пропорционально зависимости:
КY,Z пр=ПY,Z при t≤t0;

при t0<t≤t0+T; (1)
КY,Z пр=0 при t>t0+T,
где ПY,Z - начальный параллакс пускового устройства относительно прибора наведения соответственно в вертикальной и горизонтальной плоскостях,
t - время, отсчитываемое от момента схода ракеты;
t0=3…5/fp;
T=Dmin/Vp-t0;
fp - собственная частота ракеты;
Dmin - минимальная дальность;
Vp - средняя скорость полета ракеты на минимальную дальность.
При этом t0 является временем переходного процесса вывода ракеты на программную траекторию и выражается в секундах, Т является временем вывода ракеты на линию визирования после окончания переходного процесса и выражается в секундах.
Сущность способа состоит в следующем. При входе ракеты в ИП с начальным отклонением от его оси, равным начальному параллаксу в соответствующей плоскости, из сигналов управления, пропорциональных координатам отклонения ракеты от оси ИП, вычитают программные команды, которые до момента времени t=t0 пропорциональны величине начального параллакса, вследствие чего суммарные команды управления в соответствующих каналах до момента t=t0 близки к нулю, и ракета будет лететь по программной траектории, отстоящей от оси ИП на величину начального параллакса (предполагается, что ускорение силы тяжести скомпенсировано соответствующей командой компенсации веса, как это делается в известных противотанковых комплексах). С момента времени t=t0 и до момента времени t=t0+Т программные команды плавно изменяются до нуля так, что динамические ошибки ракеты при отработке указанного изменения программных команд будут также близки к нулю.
В результате ракета плавно, без перерегулирования и колебаний центра масс, выводится на ось ИП так же, как если бы ракета выстреливалась без начального параллакса, т.е. предлагаемый способ повышает точность наведения ракеты на цель за счет устранения переходной составляющей динамической ошибки, обусловленной отработкой контуром управления начального отклонения ракеты от оси ИП значительной величины.
Представлены графические материалы (фиг.1, фиг.2), поясняющие сущность изобретения. На фиг.1 приведены области рассеивания ракет на стартовом участке на фоне границ ИП, полученные по результатам математического моделирования при действии возмущений (ветер ±15 м/с, начальная угловая скорость в горизонтальной плоскости ±0.2 1/с). На фиг.2 приведена блок-схема лучевой системы управления ракетой, реализующей предлагаемый способ.
Недостатки известного способа наведения телеуправляемой ракеты и преимущества предлагаемого способа проиллюстрируем на примере комплекса управляемого вооружения "Вихрь", установленного на вертолете, в котором ракета выстреливается из контейнера. Расстояние между пусковым устройством (продольной осью контейнера) и осью поля управления (оптической осью прицела) на вертолете составляет ~2.8 м в горизонтальной плоскости и ~0.5 м в вертикальной плоскости, скорость выхода ракеты из контейнера составляет ~60 м/с, пусковое устройство ориентировано под заданными углами θ=0.5° и φ0=0° относительно оси ИП соответственно в вертикальной и горизонтальной плоскостях.
Исходя из характеристик ракеты и из условия обеспечения минимальной дальности определены значения времен t0=1.0 с и Т=1.5 с.
Как видно из чертежа на фиг.1, для исходного варианта стрельбы без дополнительной программной команды в горизонтальной плоскости зона рассеивания ракет (зона 1) превышает размеры ИП луча (отмечено штриховкой) и, следовательно, возможны случаи выхода ракеты из луча и потери ракеты. Зона рассеивания ракет, полученная для варианта стрельбы с дополнительной программной командой, пропорциональной величине параллакса (зона 2), значительно меньше по размеру и не выходит за границы ИП. При этом отклонения центра масс ракеты от оси луча к моменту окончания действия программной команды и далее также значительно меньше, что повышает точность стрельбы в ближней зоне атак. Важно то, что при реализации предлагаемого способа ракета с работающим маршевым двигателем не попадает в анализируемую зону телеавтомата комплекса, осуществляющего автоматическое слежение за целью.
Система управления (фиг.2) содержит прицел и источник модулированного лазерного излучения, конструктивно выполненные, например, аналогично наземной аппаратуре управления 9С53 комплекса "Кастет" ([1], с.113, [3]).
На ракете расположены: аппаратура определения координат, БФК, БРП, выполненные аналогично реализованным в ракете 9М117 ([2], с.15-18, 16, 17, 19-26, 21, рис.13, с.22, 25, 40-41, рис.24) и блок формирования сигналов функций времени, выполненный, например, на основе схемы электронного реле времени, приведенной в книге Ф.Ф.Андреева. Электронные устройства автоматики, М.: Машиностроение, 1978 г., с.283, рис.206, 6, [5].
Времена t0 и Т рассчитываются предварительно по формуле (1) и устанавливаются в блоке формирования сигналов функций времени. При выходе ракеты из пускового устройства (пускового контейнера или ствола орудия) срабатывает замыкатель, и напряжение с выхода бортовой батареи подается на вход блока формирования сигналов функций времени, где оно подключается ко входу реле и входу делителя напряжения, с выхода которого напряжение, пропорциональное величине параллакса, в течение времени t0, на которое настроено реле, подается на вход блока формирования команд, где вычитается из команды управления. В течение этого времени ракета, набирая скорость, летит параллельно оси поля управления. По достижении времени t0 срабатывает реле, и на вход вычитающего устройства БФК подается выходной сигнал с формирователя функции косинуса, который в течение времени Т меняется по косинусоидальному закону от величины, пропорциональной величине параллакса, до нуля. В результате ракета выводится на ось поля управления. Формирователь функции косинуса может быть реализован на основе схемы, приведенной в книге И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. М.: Энергоатомиздат, 1987 г., с.205, рис.3.28 [6], вычитающее устройство может быть реализовано на основе схемы суммирующего усилителя, представленной на с.22 [6].
Предлагаемый способ наведения управляемой ракеты позволяет повысить вероятность попадания ракеты в цель за счет уменьшения отклонений ракеты от линии прицеливания на начальном участке и уменьшения вероятности выхода ракеты из ИП.
Эффективность предлагаемого способа подтверждена в процессе разработки комплекса управляемого вооружения "Вихрь".
Источники информации
1. Ангельский Р.Д. Отечественные противотанковые комплексы, Москва, ACT, Астрель, 2002 г., с.74, 75, 84, 100, 111-114.
2. Выстрел 3УБК10 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации, М.: Военное издательство, 1987 г., с.13, 15-18, - прототип.
3. Наземная аппаратура управления 9С53.00.000.ТО.
4. М.В.Максимов, Г.И.Горгонов. Радиоуправление ракетами, М.: Советское радио, 1964, с.172-173.
5. Ф.Ф.Андреев. Электронные устройства автоматики, М.: Машиностроение, 1978 г., с.283.
6. И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем, М.: Энергоатомиздат, 1987 г., с.22, с.205.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479818C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2012 |
|
RU2481541C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2010 |
|
RU2439462C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436033C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
Изобретение относится к области наведения ракет и может быть использовано в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах. Технический результат - повышение точности стрельбы в ближней зоне атак за счет уменьшения отклонений центра масс ракеты от линии прицеливания на начальном участке. Сущность изобретения заключается в том, что в способе наведения телеуправляемой ракеты, выстреливаемой из пускового устройства, расположенного с начальным параллаксом относительно прибора наведения, осуществляют ориентирование пускового устройства с ракетой в направлении поля управления. При полете ракеты осуществляют формирование сигналов управления, пропорциональных координатам отклонения ракеты от оси поля управления в вертикальной и горизонтальной плоскостях, и производят отклонение органов управления ракеты соответственно сформированным сигналам управления. При этом формируют программные команды, пропорциональные величине начального параллакса, которые вычитают из сигналов управления ракетой. 1 з.п. ф-лы, 2 ил.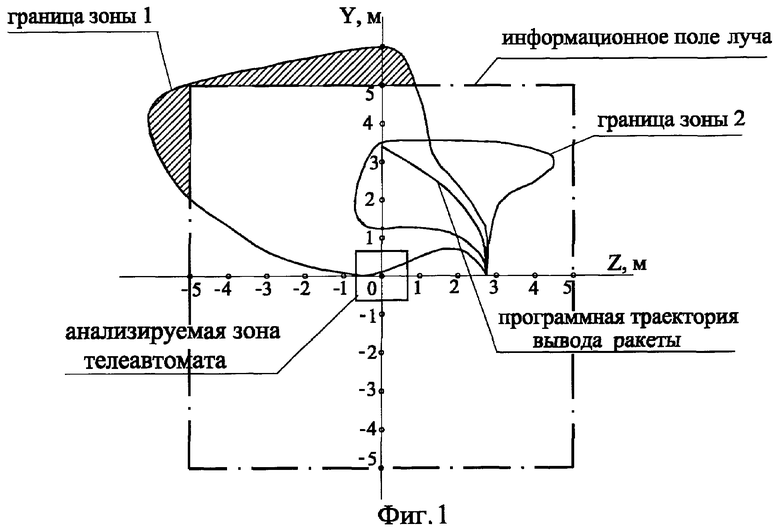
1. Способ наведения телеуправляемой ракеты, выстреливаемой из пускового устройства, расположенного с начальным параллаксом относительно прибора наведения, включающий ориентирование пускового устройства с ракетой в направлении поля управления, формирование сигналов управления, пропорциональных координатам отклонения ракеты от оси поля управления в вертикальной и горизонтальной плоскостях, и отклонение органов управления ракеты соответственно сформированным сигналам управления, отличающийся тем, что дополнительно формируют программные команды, пропорциональные величине начального параллакса, которые вычитают из сигналов управления ракетой.
2. Способ по п.1, отличающийся тем, что величину программных команд изменяют в соответствии с зависимостями:
KY,Z пр=ПY,Z при t≤t0;

при t0<t≤t0+T;
KY,Z пр=0 при t>t0+T,
где ПY,Z - начальный параллакс пускового устройства относительно прибора наведения соответственно в вертикальной и горизонтальной плоскостях;
t - время, отсчитываемое от момента схода ракеты;
t0=3…5/fp;
 ;
;
fp - собственная частота ракеты;
Dmin - минимальная дальность;
Vp - средняя скорость полета ракеты на минимальную дальность.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Техническое описание и инструкция по эксплуатации | |||
| - М.: Военное издательство, 1987, с.13 | |||
| US 4027837 А, 07.06.1977 | |||
| СТОПОР ДЛЯ ОТСЕЧКИ ШЛАКА В КОНВЕРТЕРЕ | 1998 |
|
RU2148656C1 |
| ВНУТРИМАТОЧНЫЙ КОНТРАЦЕПТИВ | 1992 |
|
RU2049449C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ И СТРЕЛЯЮЩИЙ КОМПЛЕКС | 2001 |
|
RU2210725C2 |

