Изобретение относится к измерительной технике и может быть использовано для измерения направления и скорости потока газа или жидкости. Наиболее оно применимо для измерения параметров слабых конвективных потоков воздуха внутри промышленных и бытовых зданий.
Известен способ измерения параметров течения жидкости, при котором скорость течения определяют по величине отклонения маятникового подвеса, например, шарика, подвешенного на нити (см. патент США №3370462, кл. 73-228, 1968). Данный способ не позволяет измерять вертикальную составляющую скорости текучих сред. Кроме того, наличие вертикальной составляющей скорости вносит значительную погрешность в измерение ее горизонтальной составляющей.
Наиболее близким по технической сущности к предлагаемому изобретению является способ определения скорости жидкости или газа (см. авторское свидетельство СССР №296996, G01P 5/02), при котором скорость потока определяют по величине вектора силы, действующей на подвижный чувствительный элемент - шар, симметрично закрепленный гибкими связями - упругими тягами с неподвижной системой, выполненной в виде кольца и полукольца. Недостатком способа является сложность измерений, так как необходимо измерять силы натяжения четырех тяг и низкая чувствительность к слабым потокам, которая определяется чувствительностью измерителей натяжений. Для реализации данного способа требуется достаточно сложное и дорогое измерительное оборудование.
Техническая задача предлагаемого изобретения заключается в создании общедоступного, дешевого, высокочувствительного, но и достаточно точного способа измерения направления и скорости потока текучей среды, преимущественно для измерения слабых конвективных потоков воздуха в промышленных и бытовых помещениях.
Решение данной задачи достигается в способе определения направления и скорости потока жидких и газообразных сред, включающем создание системы объектов в виде соединения гибкой связью неподвижного предмета с подвижным предметом, предварительную тарировку системы в потоках с известными скоростями, определение силы воздействия потока на подвижный предмет по ее горизонтальной и вертикальной составляющим, определение скорости и направления потока по вычисленному значению силового воздействия и предварительной тарировке, согласно изобретению выбирают подвижный предмет с удельным весом меньше удельного веса окружающей среды, а гибкую связь - тяжелой, в виде металлической цепочки, и устанавливают ее таким образом, чтобы образовалась наблюдаемая вершина провеса связи, принимают за наблюдаемые координаты полученной системы объектов точку вершины провеса гибкой связи, точку привязи подвижного предмета и длину связи между этими точками, измеряют указанные координаты для вычисления горизонтальной и вертикальной составляющих силы воздействия потока на подвижный предмет.
При малых скоростях потока и равномерно тяжелой по длине гибкой связи в качестве ее математической модели используют уравнение цепной линии.
Отсутствие сухого трения в обоих используемых в способе физических процессах: воздействие потока на легкий подвижный предмет и противодействии ему гибкой связи с удобными наблюдаемыми координатами обеспечивает высокую чувствительность к малым скоростям потока. Практически для измерения слабых конвективных потоков воздуха требуется дешевый детский шар, наполненный легким газом, и тонкая металлическая цепочка, что делает способ общедоступным, дешевым и простым.
В дальнейшем описании подвижный предмет без нарушения общности будем считать симметричным и называть шаром, а измерения производить в воздушном потоке. Достаточная точность способа обеспечивается за счет использования в измерениях координаты вершины провеса гибкой связи, что является отличительной особенностью предложения. Сами отсчеты может производить как человек, обходящий помещение с шаром на цепочке, так и система видеокамер или фотокамер, периодически отслеживающих состояния гибких связей многих шаров, распределенных по помещению, и диаметры шаров.
Сущность изобретения поясняется чертежами, где:
на фиг.1 - состояние системы объектов при:
а) наличии вершины провеса гибкой связи (удельный вес шара меньше удельного веса окружающей среды);
б) отсутствии вершины провеса гибкой связи (удельный вес шара меньше удельного веса окружающей среды);
в) удельном весе шара больше удельного веса окружающей среды;
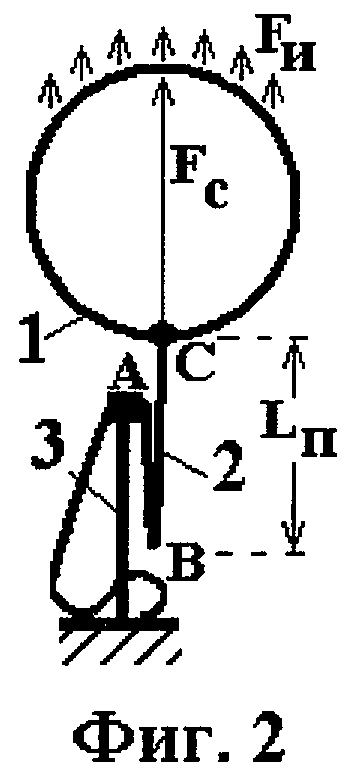
на фиг.2 - состояние системы объектов в спокойном воздухе;
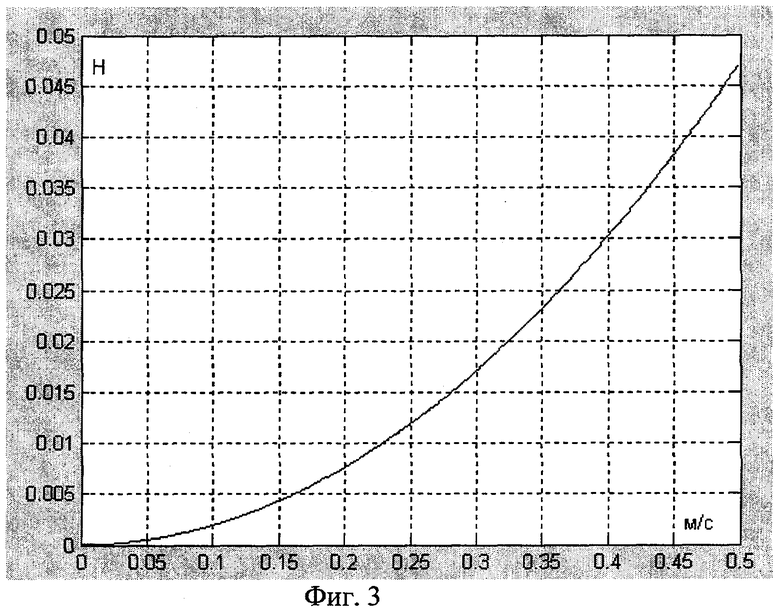
на фиг.3 - график силы воздействия на шар потока воздуха в зависимости от его скорости в линейных масштабах;
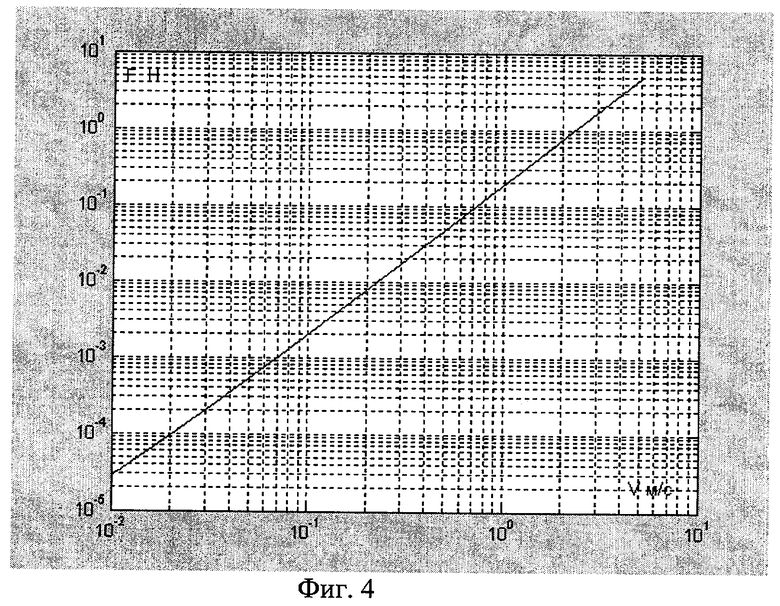
на фиг.4 - график силы воздействия на шар потока воздуха в зависимости от его скорости в логарифмических масштабах.
Используемая в способе система объектов (фиг.1, 2) состоит из помещенного в поток воздуха (среды) шара (подвижного предмета) 1, соединенного в точке С гибкой тяжелой связью 2 с неподвижным предметам в виде стойки 3 или руки человека в точке А. При этом на фиг.1а, б и фиг.2 удельный вес шаров меньше удельного веса воздуха (избыточная подъемная сила  по вертикальной оси z положительна), на фиг.1в удельный вес шара больше удельного веса воздуха (избыточная сила отрицательна). К шару может быть привязан отвес 4 с рисками для облегчения измерений, что показано только на фиг.1б. Здесь и далее подчеркивание указывает на векторность физической величины только в двух осях (х - горизонтальная и z - вертикальная с соответствующими им кватернионами i и k), так как для упрощения предполагается, что все рисунки, пояснения и расчеты к ним выполнены в вертикальной плоскости потока, когда нет составляющей потока, уходящей в глубь рисунка по оси y с соответствующим ей кватернионом j.
по вертикальной оси z положительна), на фиг.1в удельный вес шара больше удельного веса воздуха (избыточная сила отрицательна). К шару может быть привязан отвес 4 с рисками для облегчения измерений, что показано только на фиг.1б. Здесь и далее подчеркивание указывает на векторность физической величины только в двух осях (х - горизонтальная и z - вертикальная с соответствующими им кватернионами i и k), так как для упрощения предполагается, что все рисунки, пояснения и расчеты к ним выполнены в вертикальной плоскости потока, когда нет составляющей потока, уходящей в глубь рисунка по оси y с соответствующим ей кватернионом j.
Способ по п.1 формулы осуществляют следующим образом. Тяжелую гибкую связь 2 выбирают и устанавливают таким образом, чтобы между точками привязи А и С образовалась наблюдаемая вершина провеса в точке В (фиг.1а). На фиг.1б нет этой вершины из-за неправильного выбора длины связи и ее удельного веса. Если удельный вес шара будет больше удельного веса воздуха, то никакой выбор гибкой связи не даст провес с вершиной (фиг.1в). На фиг.2 показан шар с удельным весом меньше удельного веса воздуха и с правильно выбранной связью 2 в неподвижном воздухе. Принимают за наблюдаемые координаты точку В вершины провеса гибкой связи, точку С привязи подвижного предмета и длину гибкой связи между этими точками. Измеряют координаты точек В и С и длину гибкой связи между этими точками, а направление и скорость потока определяют путем сравнения полученных данных с результатами предварительной тарировки. Это обусловлено следующими физическими процессами.
Каждый из шаров 1 на фиг.1 является чувствительным элементом или датчиком скорости и направления потока (см. вектор  , на фиг.1а) с преобразованием скорости и направления потока в вектор силы
, на фиг.1а) с преобразованием скорости и направления потока в вектор силы  , того же направления, если предположить шар или другой подвижный предмет 1 симметричной формы. Но формула изобретения с приемом тарирования защищает и общий случай несимметричных форм, когда направления векторов скорости
, того же направления, если предположить шар или другой подвижный предмет 1 симметричной формы. Но формула изобретения с приемом тарирования защищает и общий случай несимметричных форм, когда направления векторов скорости  и силы
и силы  не совпадают. Нахождение зависимости этой силы и ее направления от скорости - сложная аэродинамическая задача, даже ее частные решения (см. ниже) - приблизительные, поэтому лучше и использовать прием тарирования, т.е. предварительного помещения подвижного предмета в контрольные потоки с известными скоростями и направлениями (например, в неподвижный воздух - фиг.2) с фиксацией координат точек В и С гибкой связи 2.
не совпадают. Нахождение зависимости этой силы и ее направления от скорости - сложная аэродинамическая задача, даже ее частные решения (см. ниже) - приблизительные, поэтому лучше и использовать прием тарирования, т.е. предварительного помещения подвижного предмета в контрольные потоки с известными скоростями и направлениями (например, в неподвижный воздух - фиг.2) с фиксацией координат точек В и С гибкой связи 2.
К первой силе  действия на шар потока добавляется вторая вертикальная избыточная подъемная или выталкивающая сила
действия на шар потока добавляется вторая вертикальная избыточная подъемная или выталкивающая сила  - разность между подъемной силой Архимеда (вверх) и весом шара (вниз). Эта сила рассчитывается (см. ниже) через размеры и собственный вес шара, объем и удельный вес легкого газа в нем, но еще проще определяется экспериментально помещением шара в спокойный воздух (фиг.2). Векторная сумма этих двух сил
- разность между подъемной силой Архимеда (вверх) и весом шара (вниз). Эта сила рассчитывается (см. ниже) через размеры и собственный вес шара, объем и удельный вес легкого газа в нем, но еще проще определяется экспериментально помещением шара в спокойный воздух (фиг.2). Векторная сумма этих двух сил  (фиг.1a, 2) определяет силу воздействия шара на гибкую связь в точке привязи С. Зная
(фиг.1a, 2) определяет силу воздействия шара на гибкую связь в точке привязи С. Зная  и
и  , можно рассчитать силу воздействия потока на шар
, можно рассчитать силу воздействия потока на шар  , далее уже через нее определить направление и скорость потока.
, далее уже через нее определить направление и скорость потока.
Гибкая связь 2 на фиг.1, 2 удерживает шар в потоке воздуха, и одновременно она является измерительным элементом вектора силы  в точке С воздействия гибкой связи на шар и не показанных на чертежах сил воздействия потока на саму гибкую связь. Физической особенностью гибкой связи (при отсутствии изгибной жесткости в ней, как в проволоке) является то, что усилие в любой ее точке направлено по касательной к этой точке. Поэтому вид линии связи позволяет постороннему наблюдателю определить направления векторов усилий, например,
в точке С воздействия гибкой связи на шар и не показанных на чертежах сил воздействия потока на саму гибкую связь. Физической особенностью гибкой связи (при отсутствии изгибной жесткости в ней, как в проволоке) является то, что усилие в любой ее точке направлено по касательной к этой точке. Поэтому вид линии связи позволяет постороннему наблюдателю определить направления векторов усилий, например,  и
и  в точках В и С на фиг.1а. Даже при воздействии потока на связь 2 в вершине ее провеса В отсутствует вертикальная составляющая усилия в ней. Это означает, что форма и длина линии связи слева от точки В на фиг.1а никак не влияет на форму и длину этой связи справа от этой точки, левую часть можно выбирать из практических соображений, а вес гибкой связи справа от этой точки будет равен подъемной силе шара плюс сила воздействия потока на гибкую связь. Следовательно, целесообразно протарировать контрастными метками гибкую связь 2 прямо в единицах ее веса до точки В, который при отсутствии воздейстия потока на гибкую связь совпадет с силой FBCZ. При изменении скорости потока будут меняться как положение точки В, так и форма линии гибкой связи справа от нее. При тарировании отпадает необходимость раздельного моделирования участвующих в эксперименте объектов. Например, расстояние по вертикали (высота) между точками В и С в спокойном воздухе (фиг.2) совпадает с длиной связи и однозначно определяет это состояние покоя. Изменение этой высоты будет говорить о появлении вертикального потока, которое надо сопоставить с контрольными значениями потоков при тарировке. При этом отпадает необходимость в предварительных измерениях параметров предмета 1, его несимметричных аэродинамических свойств, удельного веса газа в нем, удельного веса связи 2 и ее аэродинамических свойств. Такое упрощение обуславливает необходимость составления объемных таблиц и выполнение сложной предварительной тарировки. Таблицы могут быть упрощены до формул, описанных в общепринятых методиках планирования эксперимента. В этом суть отличительной особенности предложения (с использованием вершины провеса В) и возможность использования изобретения при значительной вариации неоговоренных в формуле изобретения условий.
в точках В и С на фиг.1а. Даже при воздействии потока на связь 2 в вершине ее провеса В отсутствует вертикальная составляющая усилия в ней. Это означает, что форма и длина линии связи слева от точки В на фиг.1а никак не влияет на форму и длину этой связи справа от этой точки, левую часть можно выбирать из практических соображений, а вес гибкой связи справа от этой точки будет равен подъемной силе шара плюс сила воздействия потока на гибкую связь. Следовательно, целесообразно протарировать контрастными метками гибкую связь 2 прямо в единицах ее веса до точки В, который при отсутствии воздейстия потока на гибкую связь совпадет с силой FBCZ. При изменении скорости потока будут меняться как положение точки В, так и форма линии гибкой связи справа от нее. При тарировании отпадает необходимость раздельного моделирования участвующих в эксперименте объектов. Например, расстояние по вертикали (высота) между точками В и С в спокойном воздухе (фиг.2) совпадает с длиной связи и однозначно определяет это состояние покоя. Изменение этой высоты будет говорить о появлении вертикального потока, которое надо сопоставить с контрольными значениями потоков при тарировке. При этом отпадает необходимость в предварительных измерениях параметров предмета 1, его несимметричных аэродинамических свойств, удельного веса газа в нем, удельного веса связи 2 и ее аэродинамических свойств. Такое упрощение обуславливает необходимость составления объемных таблиц и выполнение сложной предварительной тарировки. Таблицы могут быть упрощены до формул, описанных в общепринятых методиках планирования эксперимента. В этом суть отличительной особенности предложения (с использованием вершины провеса В) и возможность использования изобретения при значительной вариации неоговоренных в формуле изобретения условий.
Линия связи 2 может иметь переменный удельный вес по длине, что позволит сформировать удобные метрологические характеристики всей системы объектов 1 и 2.
Способ по п.2 формулы осуществляют следующим образом. При измерении малых скоростей потоков их действием на гибкую связь 2 можно пренебречь. Тогда получится векторная диаграмма сил, показанных на фиг.1а, и FBCZ=FCZ, FB=FX. Так как нет вертикальной составляющей силы в точке В, то весь вес гибкой связи 2 от точки В до С уравновешен только вертикальной составляющей силы FCZ в точке С. Далее последовательно вводим упрощения с раздельным определением математических моделей подвижного предмета 1 и гибкой связи 2.
Математическая модель гибкой связи 1. Предполагаем гибкую связь 2 равномерно тяжелой по длине с удельной массой q на единицу длины (кг/м). Тогда наиболее близкой математической моделью гибкой связи 2 будет общеизвестное уравнение цепной линии. Если начало координат х=0 и z=0 поместить в точку В на фиг.1а или в вершину провеса, то цепная линия, ее производная и длина выразятся через гиперболические функции (Математическая энциклопедия. - М.: Советская энциклопедия, 1985, т.5, с.815):



Здесь а - единственный параметр цепной линии, l - длина линии от вершины В до произвольной точки с абсциссой x. Координаты конечной точки привязи С обозначим большими буквами x=X (по горизонтали), z=Z (по вертикали), как и всю длину l=L. Применение тождества  позволяет получить еще одно уравнение
позволяет получить еще одно уравнение

Далее возможно несколько вариантов решений системы уравнений (1)-(4) в зависимости от того, какие два из трех параметров X, Y или L мы устанавливаем наблюдаемыми. Если известна длина L как наиболее легко измеряемый по контрастным меткам на связи 2 параметр, то вес интересующего нас участка гибкой связи 2 от точки В до С и вертикальная составляющая ее воздействия на предмет 1 определяется

Здесь g=9.8 м/с2 - ускорение свободного падения. Вектор результирующей силы воздействия гибкой связи  (помним Fcx=Fx) на шар 1 (см. фиг.1a) направлен по касательной к этой связи, что равняется производной (2) в точке привязи С. Тогда из (2), (4), (5)
(помним Fcx=Fx) на шар 1 (см. фиг.1a) направлен по касательной к этой связи, что равняется производной (2) в точке привязи С. Тогда из (2), (4), (5)

Для определения этой составляющей наблюдатель измеряет величину Z - разность вертикальных координат точек В и С на фиг.1а. Формулы расчетов через другие пары измеряемых параметров находятся только численными методами на ЭВМ из уравнений (1)-(6). Программы их решения - простые и стандартные, здесь они не приводятся. Решения через другие пары наблюдаемых координат охвачены формулой изобретения.
Математическая модель подвижного предмета. Выталкивающая или избыточная подъемная сила FИ (фиг.1б) рассчитывается через массу m подвижного предмета 1 с отвесом 4 (фиг.1б) без его газового наполнения, объем газа внутри, разность плотностей
ρ=ρВ-ρГ среды и легкого газа. Для воздуха и гелия в нормальных условиях ρ=1.2-0.17=1.03 кг/м3. Когда предмет 1 является шаром диаметром d (фиг.1), то формула для этой силы

Гораздо проще, точнее и для любой формы предмета 1 определить эту силу по формуле (5) после экспериментального измерения длины связи покоя LП в спокойном воздухе (фиг.2)

Вертикальная составляющая силы воздействия потока на предмет 1

Таким образом, по формулам (6), (9) находятся обе составляющие силы воздействия потока на подвижный предмет 1  , а при симметричном предмете 1 (шаре) и направление (угол) этого потока (фиг.1а)
, а при симметричном предмете 1 (шаре) и направление (угол) этого потока (фиг.1а)

Величина силы определяется корнем квадратным из суммы квадратов найденных составляющих

Через найденную силу (11) и аэродинамические свойства подвижного предмета 1 находится скорость потока, что проще сделать экспериментально методами тарирования. Для случая шара 1 можно воспользоваться общеизвестными экспериментами и законами приведения (подобия, эквивалентности) из курса аэродинамики (Альтшуль А.Д., Кисилев П.К. Гидравлика и аэродинамика. - М.: Стройиздат, 1965, с.245-255). Силу давления F потока со скоростью V на предмет принято выражать формулой

где Cd - переменный коэффициент давления, S=π·d2/4 - характерная площадь тела (для шара равна сечению), ρB=1.2 кг/м3 - плотность среды потока (воздуха). Простота получилась за счет того, что все сложности отнесены к переменному коэффициенту Cd, который только эмпирическим графиком для шара (Альтшуль, стр.255) связан с безразмерным числом Рейнольдса

Здесь v=1.57·10-5 м2/с - кинематическая вязкость воздуха. После Re>105 ламинарный процесс обтекания шара становится турбулентным, и измерения становятся невозможными, что, собственно, и оправдывает введение в практику этого числа для эквивалентных (подобных) преобразований в описании аэродинамических процессов. На стр.254 (Альтшуль) приведено уравнение

с инженерной точностью описывающее весь график от нуля скорости до начала турбулентности. Это квадратичное уравнение имеет решение

Уже при небольших скоростях потока последним членом формулы можно пренебречь, тогда коэффициент Cd=0.449 становится постоянным, зависимость усилия от скорости потока (12) становится параболической, а все расчеты упрощаются

Но главное, при этом возможно приближенное обратное аналитическое решение

Уточненную формулу (15) применяют для измерения малых скоростей потока. Подстановка выражения (13) в выражение (15), а затем в выражение (12) дает приемлемое аналитическое описание всего эмпирического графика (Альтшуль, стр.255), сведение которого в одну формулу нецелесообразно из-за громоздкости и из-за необходимости промежуточного расчета (13) для контроля условия существования 0<Re<105. В итоге получаем прямое аэродинамическое решения задачи нахождения усилия на шар по скорости потока, а нужно обратное решение - нахождение скорости по известному (11) усилию. Обратное решение находится только численными методами на ЭВМ, но на практике проще построить график прямого решения (13), (15), (12), а по графику найти нужное обратное решение.
Численный пример осуществления способа по п.2 формулы. Пусть для определения скорости воздушного потока выбран шар диаметром d=0.3 м, массой m=7·10-3 кг с гелиевым наполнением (ρB=1.2 кг/м3, ρ=1.03 кг/м3, v=1.57·10-5 м2/с) и равномерно тяжелая по длине гибкая связь (металлическая цепочка) 2 с удельной массой q=10-2 кг/м. Помещаем шар в условия покоя (фиг.2) и измеряем длину участка ВС гибкой связи в покое LП или рассчитываем ее из уравнения баланса сил выталкивания шара и веса гибкой связи, т.е. приравниванием формул (7) и (8)

Предположим, что при измерении в потоке (фиг.1а) были сняты отсчеты L=0.8 м, Z=0.7 м. Горизонтальная (6), вертикальная (9) и общая (11) составляющие сил действия (в Ньютонах) потока воздуха на шар, а также угол наклона потока (10) составят
По приближенной формуле (17) скорость воздушного потока

Проведем уточненные расчеты по формуле (15). Подставляем в формулу (13) максимально допустимое значение Re=105, d=0.3 м и получаем максимальную ламинарную скорость потока VMAX=5.11 м/с. По формулам (13), (15), (12) строим график силы воздействия потока от скорости при скоростях, меньших максимальной (фиг.3). При рассчитанном значении F=0.0113 Н находим по графику скорость потока V=0.24 м/с. Видно, что график фиг.3, 4 мало отличается от параболы. Действительно, даже при скорости при еще меньшей расчетной V=0.1 м/с по точной формуле (15) Cd=0.474, что мало отличается от приближенного постояного значения 0.449, когда сложная зависимость вырождается в простую параболу. Поэтому сложные расчеты с построением графика фиг.3, 4 имеет смысл проводить при измерениях еще меньших скоростей потока, чем в примере. При еще меньших скоростях параболическая зависимость фиг.3, 4 превращается в линейную.
Таким образом, предлагаемый способ позволяет дешево, просто, из-за возможности реализации представленных расчетов направления и скорости потока жидких и газообразных сред на ЭВМ, и достаточно точно измерять скорости потоков вплоть до самых малых. Последнее объясняется возможностью простых и достаточно точных измерений очень малых усилий воздействия слабых потоков на чувствительный предмет 1 с помощью тяжелой гибкой связи 2 (фиг.1в) согласно предлагаемому способу действий. Предполагается применение способа для указанных измерений при отладке систем автоматического регулирования температуры и создания комфортных условий внутри жилых и промышленных помещений.
Изобретение может быть использовано преимущественно для измерения параметров движения слабых конвективных потоков воздуха внутри промышленных и бытовых зданий. Создают систему объектов в виде соединения тяжелой гибкой связью в виде металлической цепочки неподвижного предмета с подвижным предметом, имеющим удельный вес меньше удельного веса окружающей среды (воздушный шар). Тяжелую гибкую связь устанавливают таким образом, чтобы образовалась наблюдаемая вершина провеса связи. Измеряют координаты точки вершины провеса гибкой связи, точки привязи подвижного предмета и длину связи между этими точками для вычисления горизонтальной и вертикальной составляющих силы воздействия потока на подвижный предмет. Определяют скорость и направление потока по вычисленному значению силового воздействия и предварительной тарировке. При малых скоростях потока и равномерно тяжелой по длине гибкой связи для вычисления горизонтальной и вертикальной составляющих силы воздействия потока в качестве ее математической модели гибкой связи используют уравнение цепной линии. Способ является высокочувствительным и одновременно простым и общедоступным. 1 з.п. ф-лы, 4 ил.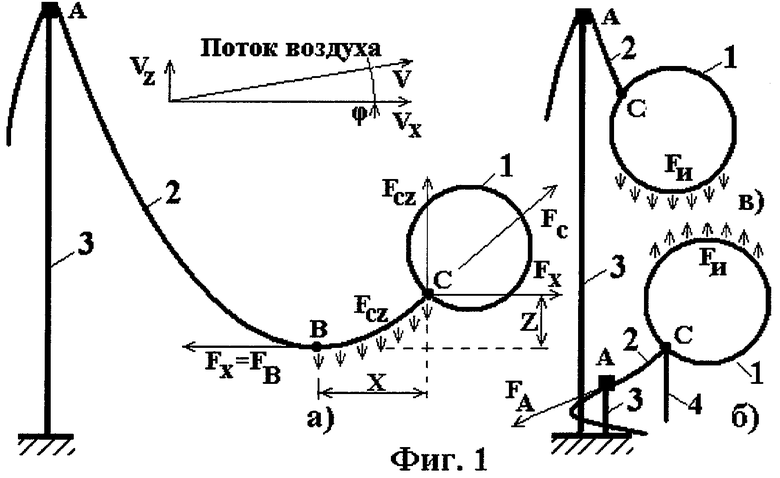
| ДАТЧИК СКОРОСТИ жидкости или ГАЗА | 0 |
|
SU296996A1 |
| US 4058010 А, 15.11.1977 | |||
| ДАТЧИК СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 1972 |
|
SU425111A1 |
| Прибор для измерения скорости и направления водных потоков | 1958 |
|
SU117143A1 |
| DE 4112781 A1, 22.10.1992. | |||

