Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к передаче данных, а более конкретно к способам проведения обработки сигналов с разложением на собственные моды канала и инверсией канала для систем связи со многими входами и многими выходами (МВМВ).
Уровень техники
В системе связи со многими входами и многими выходами (МВМВ) используются множество (NT) передающих антенн и множество (NR) принимающих антенн для передачи данных. Канал со многими входами и многими выходами (МВМВ-канал), образованный NT передающими антеннами и NR принимающими антеннами, можно разложить на NS независимых каналов, при этом NS ≤ min{NT, NR}. Каждый из NS независимых каналов также называется пространственным подканалом МВМВ-канала и соответствует некоторому размеру. МВМВ-система может обеспечить улучшенные эксплуатационные параметры (например, увеличенную емкость передачи), если используются дополнительные размерности, создаваемые множествами передающих и принимающих антенн.
В пространственных подканалах широкополосной МВМВ-системы возможны различные условия каналов, обуславливаемые различными факторами, такими, как замирание и многолучевое распространение. Таким образом, каждый пространственный подканал может испытывать частотно-избирательное замирание, которое характеризуется разными коэффициентами усиления канала на разных частотах (т.е. разных интервалах дискретизации по частоте или поддиапазонах) общей полосы пропускания системы. При частотно-избирательном замирании каждый пространственный подканал может достигать разных отношений «сигнал - шум и помехи» (ОСШП (SNRs)) для разных интервалов дискретизации по частоте. Следовательно, количество битов информации на символ модуляции (или скорость передачи данных), которые могут передаваться на различных интервалах дискретизации по частоте каждого пространственного подканала для конкретного уровня эксплуатационных параметров (например, частоты ошибок в пакетах, составляющей 1%) могут отличаться от интервала дискретизации к интервалу дискретизации. Кроме того, поскольку условия каналов в типичном случае изменяются со временем, поддерживаемые скорости передачи данных для интервалов дискретизации пространственных подканалов также изменяются со временем.
Для борьбы с частотно-избирательным замиранием в широкополосном канале можно использовать ортогональное мультиплексирование с разделением частот (ОМРЧ (OFDM)) с целью эффективного разделения полосы пропускания системы на некоторое количество (NF) поддиапазонов (которые также можно назвать интервалами дискретизации по частоте или подканалами). В случае ОМЧР каждый частотный подканал связан с соответствующей поднесущей, на которой можно модулировать данные. Для МВМВ-системы, в которой используется ОМРЧ (т.е. для МВМВ-ОМРЧ-системы), каждый частотный подканал каждого пространственного подканала можно рассматривать как независимый канал передачи.
Ключевой проблемой в системе кодированной связи является выбор подходящих скоростей передачи данных и схем модуляции, используемых для передачи данных, на основании условий каналов. Целью этого процесса выбора является максимизация пропускной способности при одновременном удовлетворении целевых требований качества, количественными характеристиками которых могут служить конкретная частота ошибок в пакетах (ЧОП (PER)), некоторые критерии задержки, и т.п.
Один прямой способ выбора скоростей передачи данных, а также схем кодирования и модуляции, заключается в приложении «битовой нагрузки» к каждому каналу передачи в МВМВ-ОМРЧ-системе в соответствии с ее передаточной способностью (возможностью), которую можно количественно охарактеризовать средним ОСШП канала за короткий период времени. Однако этот способ имеет несколько серьезных недостатков. Во-первых, кодирование и модулирование по отдельности для каждого канала передачи может значительно увеличить сложность обработки как в передатчике, так и в приемнике. Во-вторых, кодирование по отдельности для каждого канала передачи может значительно увеличить задержку кодирования и декодирования. А в-третьих, понадобилась бы увеличенная скорость обратной связи для посылки информации о состоянии канала (ИСК), характеризующей условия канала (например, коэффициент усиления, фазу и ОСШП) для каждого канала передачи.
Для МВМВ-системы мощность передачи является еще одним параметром, которым можно манипулировать для максимизации пропускной способности. Вообще говоря, общую пропускную способность МВМВ-системы можно увеличить путем распределения большей мощности передачи по тем каналам связи, у которых больше передаточные возможности. Однако распределение разных величин мощности передачи разным интервалам дискретизации по частоте некоторого заданного пространственного подканала создает тенденцию к усилению частотно-избирательной природы пространственного подканала. Хорошо известно, что частотно-избирательное замирание вызывает межсимвольные помехи (МСП (ISI)), представляющие собой явление, вследствие которого каждый символ в принимаемом сигнале действует как искажение последующих символов в принимаемом сигнале. Искажения, вносимые МСП, ухудшают эксплуатационные параметры, негативно влияя на способность к точному обнаружению принятых символов. Чтобы смягчить вредные воздействия МСП, пришлось бы проводить коррекцию принятых символов в приемнике. Таким образом, основным недостатком распределения мощности в частотной области является дополнительное усложнение приемника для борьбы с возникающими дополнительными искажениями, вносимыми МСП.
Следовательно, в данной области техники существует потребность в способах, которые предназначены для достижения высокой общей пропускной способности в МВМВ-системе без необходимости кодирования по отдельности каждого канала передачи и смягчают вредные воздействия МСП.
Сущность изобретения
В данном изобретении предложены способы обработки передачи данных в передатчике и приемнике МВМВ-системы таким образом, что обеспечиваются высокие эксплуатационные параметры (т.е. высокая общая пропускная способность). В одном аспекте предложена реализация во временной области, которая предусматривает использование собственного разложения канала в частотной области, инверсии канала и (по выбору) результатов «заливки воды» для получения решений по формированию импульсов и управлению лучом для передатчика и приемника.
Собственное разложение канала проводят в передатчике для определения собственных мод (т.е. пространственных подканалов) МВМВ-канала и для получения первого множества векторов управления, которые используются для предварительного приведения к требуемым условиям символов модуляции перед передачей по МВМВ-каналу. Собственное разложение канала можно провести на основании матрицы оцененного канального отклика, которая представляет собой оценку канального отклика (во временной области или частотной области) МВМВ-канала. Собственное разложение канала также проводят в приемнике, чтобы получить второе множество векторов управления, которые используются для приведения к требуемым условиям принятых символов таким образом, что в приемнике восстанавливаются ортогональные потоки символов.
Инверсию канала проводят в передатчике для получения весовых коэффициентов, которые используются для минимизации или уменьшения величины искажений, вносимых МСП, в приемнике. В частности, инверсию канала можно проводить для каждой собственной моды, используемой для передачи данных. Для каждой собственной моды можно получить одно множество весовых коэффициентов на основании матрицы оцененного канального отклика для МВМВ-канала и использовать это множество для инвертирования частотного отклика собственной моды.
Можно (по выбору) использовать анализ методом «заливки воды» для более оптимального распределения имеющейся мощности передачи по собственным модам МВМВ-канала. В частности, по собственным модам, на которых передаточные возможности больше, можно распределять и большие мощности передачи, а собственные моды, на которых передаточные возможности меньше, можно исключить из использования (т.е. распределить нулевую мощность передачи этим «плохим» собственным модам). Тогда мощность передачи, распределенная каждой собственной моде, определяет скорость передачи данных и, возможно, схему кодирования и модуляции, которую следует использовать для этой собственной моды.
В передатчике данные сначала обрабатываются (т.е. кодируются и модулируются) в соответствии с некоторой конкретной схемой обработки, чтобы обеспечить некоторое количество потоков символов модуляции (например, один поток символов модуляции для каждой собственной моды). Получают (например, из приемника) матрицу оцененного канального отклика для МВМВ-канала и осуществляют ее разложение (например, в частотной области с использованием собственного разложения канала), чтобы получить множество матриц правых собственных векторов и множество матриц сингулярных значений. Затем получают некоторое количество множеств весовых коэффициентов на основании матриц сингулярных значений, причем каждое множество весовых коэффициентов используют для инвертирования частотного отклика соответствующей собственной моды, используемой для передачи данных. На основании матриц сингулярных значений можно также провести анализ методом «заливки воды», чтобы получить множество масштабирующих значений, характеризующих мощности передачи, распределенные собственным модам. Затем получают матрицу формирования импульсов для передатчика на основании матриц правых собственных векторов, весовых коэффициентов и масштабирующих значений (если они есть). Матрица формирования импульсов содержит векторы управления, которые используются для предварительного приведения к требуемым условиям потоков символов модуляции с целью получения приведенных к требуемым условиям символов, передаваемых по МВМВ-каналу.
В приемнике также получают матрицу оцененного канального отклика (например, на основании символов пилот-сигнала, посылаемых из передатчика) и разлагают их, чтобы получить множество матриц левых собственных векторов. Затем получают матрицу формирования импульсов для приемника на основании матриц левых собственных векторов и используют ее для приведения к требуемым условиям некоторого количества потоков принятых символов импульсов для получения некоторого количества потоков восстановленных импульсов. Восстановленные символы затем обрабатывают (например, демодулируют и декодируют), чтобы восстановить переданные данные.
Ниже приводится более подробное описание различных аспектов и вариантов осуществления изобретения. В изобретении также предложены способы, цифровые процессоры сигналов, блоки передатчика и приемника, а также другие устройства и элементы, которые воплощают различные аспекты, варианты осуществления и признаки изобретения, подробнее описываемые ниже.
Краткое описание чертежей
Признаки, сущность и преимущества настоящего изобретения станут более понятными из подробного описания, приводимого ниже, если изучить его совместно с чертежами, на которых одинаковые позиции везде обозначают соответственно одинаковые элементы, при этом:
на фиг.1 представлена блок-схема варианта осуществления передающей системы и принимающей системы в МВМВ-системе;
на фиг.2 представлена блок-схема передатчика в передающей системе;
на фиг.3А и 3В представлены схемы, которые графически иллюстрируют получение весовых коэффициентов, используемых для инвертирования частотного отклика каждой собственной моды МВМВ-канала;
на фиг.4 представлена блок-схема последовательности операций процесса распределения суммарной доступной мощности передачи по собственным модам МВМВ-канала;
на фиг.5А и 5В представлены схемы, которые графически иллюстрируют распределение суммарной мощности передачи по трем собственным модам в возможной МВМВ-системе;
на фиг.6 представлена блок-схема последовательности операций варианта осуществления обработки сигналов в блоке передатчика;
на фиг.7 представлена блок-схема приемника в принимающей системе; и
на фиг.8 представлена блок-схема последовательности операций варианта осуществления обработки сигналов в принимающем блоке.
Подробное описание
Описываемые здесь способы обработки передачи данных в передатчике и приемнике можно использовать для различных систем беспроводной связи. Для ясности отметим, что различные аспекты и варианты осуществления изобретения описаны специально для системы связи со многими входами и многими выходами (МВМВ).
В МВМВ-системе используются множество (NT) передающих антенн и множество (NR) принимающих антенн для передачи данных. МВМВ-канал, образованный NT передающими антеннами и NR принимающими антеннами, можно разложить на NS независимых каналов, при этом NS ≤ min{NT, NR}. Каждый из NS независимых каналов также называется пространственным подканалом МВМВ-канала. Количество пространственных подканалов определяется количеством собственных мод для МВМВ-канала, которое в свою очередь зависит от матрицы канального отклика, описывающей отклик между NT передающими и NR принимающими антеннами.
На фиг.1 представлена блок-схема варианта осуществления передающей системы 110 и принимающей системы 150, которые выполнены с возможностью реализации различных способов обработки сигналов, описываемых здесь.
В передающей системе 110 данные трафика выдаются из источника 112 данных в процессор 114 данных передачи (ПЕР), который форматирует, кодирует и перемежает данные трафика на основании одной или нескольких схем кодирования для обеспечения кодированных данных. После этого кодированные данные трафика можно мультиплексировать с помощью данных пилот-сигнала, используя, например, мультиплексирование с временным разделением каналов (МВР (TDM)) или мультиплексирование с кодовым разделением каналов (МКР (CDM)) во всех потоках данных или в подмножестве потоков данных, предназначенных для передачи. Данные пилот-сигнала обычно являются известным набором данных, обработанных известным образом, если обработка вообще применяется. Осуществляют перемежение мультиплексированных данных пилот-сигнала и кодированных данных трафика, а затем - их модулирование (например, путем посимвольного отображения) на основании одной или нескольких схем модуляции, чтобы обеспечить символы модуляции. В одном варианте осуществления, процессор 114 данных ПЕР обеспечивает один поток символов модуляции для каждого пространственного подканала, используемого для передачи данных. С помощью сигналов управления, обеспечиваемых контроллером 130, можно определять скорость передачи данных, кодирование, перемежение и модуляцию для каждого потока символов модуляции.
Затем символы модуляции выдаются в МВМВ-процессор 120 ПЕР и подвергаются дальнейшей обработке. В конкретном варианте осуществления, обработка посредством МВМВ-процессора 120 ПЕР включает в себя: (1) определение матрицы оцененного частотного канального отклика МВМВ-канала; (2) разложение этой матрицы для определения собственных мод МВМВ-канала и получение множества векторов «управления» для передатчика, по одному вектору для потока символов модуляции, передаваемого по каждому пространственному подканалу; (3) получение матрицы формирования пространственно-временных импульсов передачи на основании векторов управления, а также весовой матрицы, характеризующей мощности передачи, распределенные интервалам дискретизации по частоте собственных мод; и (4) предварительное приведение символов модуляции к требуемым условиям с помощью матрицы формирования импульсов, чтобы обеспечить предварительно приведенные к требуемым условиям символы модуляции. Обработка посредством МВМВ-процессора 120 ПЕР подробнее описана ниже. Затем в передатчики ПЕР, обозначенные позициями 122а - 122t, выдают до NT потоков символов, предварительно приведенных к требуемым условиям.
Каждый передатчик 122 преобразует соответствующий поток символов, предварительно приведенных к требуемым условиям, в один или несколько аналоговых сигналов и проводит дополнительное приведение этих аналоговых сигналов к требуемым условиям (т.е. усиливает, фильтрует и преобразует эти сигналы с повышением частоты), чтобы сформировать модулированный сигнал, подходящий для передачи по МВМВ-каналу. Модулированный сигнал из каждого передатчика 122 затем передается посредством соответствующей антенны 124 в принимающую систему.
В принимающей системе 150 переданные модулированные сигналы принимаются NR антеннами 152а-152r, и принятый сигнал с каждой антенны выдается в соответствующий приемник (ПРИЕМ) 154. Каждый приемник 154 приводит принятый сигнал к требуемым условиям (т.е. фильтрует, усиливает и преобразует этот сигнал с понижением частоты), преобразует приведенный к требуемым условиям сигнал в цифровую форму для обеспечения потока выборок, а также обрабатывает поток выборок для обеспечения потока принятых символов. После этого, МВМВ-процессор 160 приема (ПРИ) принимает и обрабатывает NR потоков принятых сигналов для обеспечения NT потоков восстановленных символов, которые являются оценками символов модуляции, переданных из передающей системы. В одном варианте осуществления, обработка посредством МВМВ-процессора 160 ПРИ может включать в себя: (1) определение матрицы оцененного частотного канального отклика МВМВ-канала; (2) разложение этой матрицы для определения множества векторов управления для приемника; (3) получение матрицы формирования пространственно-временных импульсов приема на основании векторов управления; и (4) приведение принятых символов к требуемым условиям с помощью матрицы формирования импульсов, чтобы обеспечить восстановленные символы. Обработка посредством МВМВ-процессора 160 ПРИ подробнее описана ниже.
Затем процессор 162 данных приема (ПРИ) демодулирует, проводит обращенное перемежение и декодирует восстановленные символы для обеспечения декодированных данных, которые являются оценкой переданных данных трафика. Обработка посредством МВМВ-процессора 160 ПРИ и процессора 162 данных ПРИ является дополняющей по отношению к обработке, проведенной МВМВ-процессором 120 ПЕР и процессором 114 данных ПЕР соответственно в передающей системе 110.
МВМВ-процессор 160 ПРИ также может получать канальные импульсные отклики для МВМВ-канала, принятую мощность шума и/или отношения «сигнал - шум и помехи» (ОСШП) для пространственных подканалов, и т.п. Процессор 162 данных ПРИ также может выдавать состояние каждого принятого пакета или кадра, одну или несколько метрик эксплуатационных параметров, характеризующих декодированные результаты, и - возможно - другую информацию. Затем контроллер 170 получает информацию о состоянии канала (ИСК), которая может содержать всю или некоторую информацию, принятую из МВМВ-процессора 160 ПРИ и процессора 162 данных ПРИ. ИСК обрабатывается процессором 178 данных ПЕР, модулируется модулятором 180, приводится к требуемым условиям передатчиками 154а-154r и посылается обратно в передающую систему 110.
В передающей системе 110 модулированные сигналы из принимающей системы 150 принимаются антеннами 124, приводятся к требуемым условиям приемниками 122 и демодулируются демодулятором 140 для восстановления ИСК, переданной принимающей системой. Затем ИСК выдается в контроллер 130 и используется для генерирования различных сигналов управления для процессора 114 данных ПЕР и МВМВ-процессора 120 ПЕР.
Контроллеры 130 и 170 управляют работой в передающей и принимающей системах соответственно. Памяти 132 и 172 обеспечивают хранение кодов программ и данных, используемых контроллерами 130 и 170 соответственно.
В данной заявке предложены способы достижения высоких эксплуатационных параметров (например, большой общей пропускной способности системы) посредством реализации во временной области, при которой используется собственное разложение канала в частотной области, инверсия канала и (по выбору) результаты «заливки воды» для получения решений по формированию импульсов и управлению лучом во временной области, предназначенных для передатчика и приемника.
Собственное разложение канала проводят в передатчике для определения собственных мод МВМВ-канала и для получения первого множества векторов управления, которые используются для предварительного приведения к требуемым условиям символов модуляции. Собственное разложение канала также проводят в приемнике, чтобы получить второе множество векторов управления, которые используются для приведения к требуемым условиям принятых символов таким образом, что в приемнике восстанавливаются ортогональные потоки символов. Предварительное приведение к требуемым условиям в передатчике и приведение к требуемым условиям в приемнике ортогонализируют потоки символов, переданные по МВМВ-каналу.
Инверсию канала проводят в передатчике, чтобы сделать постоянным частотный отклик каждой собственной моды (или пространственного подканала), используемой для передачи данных. Как отмечалось выше, частотно-избирательное замирание вызывает межсимвольные помехи (МСП), которые могут ухудшить способность к правильному обнаружению принятых символов. Обычно частотно-избирательное замирание можно компенсировать в приемнике путем проведения коррекции потоков принятых символов. Однако коррекция увеличивает сложность обработки в приемнике. С помощью предлагаемых способов, инверсию канала проводят в передатчике, чтобы учесть частотно-избирательное замирание и уменьшить потребность в коррекции в приемнике.
Анализ методом «заливки воды» (или «наполнения водой») используют для более оптимального распределения имеющейся мощности передачи собственным модам в МВМВ-системе таким образом, что достигаются улучшенные эксплуатационные параметры. Тогда мощность передачи, распределенная каждой собственной моде, может определять скорость передачи данных, а также схему кодирования и модуляции, которую следует использовать для этой собственной моды.
Более подробное описание этих разных способов обработки приводится ниже.
Способы, описываемые в данной заявке, обеспечивают несколько потенциальных преимуществ. Во-первых, при разложении на собственные моды во временной области максимальное количество собственных мод с разными ОСШП задается выражением min{NT, NR}. Если на каждой моде передается один независимый поток данных, и каждый поток данных обрабатывается независимо, то максимальное количество разных схем кодирования и/или модуляции также задается выражением min{NT, NR}. Можно также сделать ОСШП для принятых потоков данных, по существу, одинаковыми, тем самым дополнительно упрощая кодирование и/или модуляцию. Таким образом, описываемые в данной заявке способы могут значительно упростить кодирование и/или модуляцию для передачи данных за счет предотвращения поинтервального (на каждый интервал дискретизации) распределения битов, требуемого для достижения некоторой емкости канала в МВМВ-ОМРЧ-системах, в которых используется метод «заливки воды» в частотной области.
Во-вторых, инверсия канала в передатчике приводит к появлению в приемнике потоков восстановленных символов, которые не требуют коррекции. А это, в свою очередь, уменьшает сложность обработки в передатчике. В отличие от этого, другие широкополосные способы, реализуемые во временной области, как правило, требуют сложной пространственно-временной компенсации для восстановления потоков символов.
В-третьих, способы передачи сигналов во временной области, описываемые в данной заявке, можно проще интегрировать в структуры каналов и/или передачи пилот-сигналов, соответствующие различным стандартам множественного доступа с кодовым разделением каналов (МДКР (CDMA)), которые также основаны на передаче сигналов во временной области. Реализация этих структур каналов и/или передачи пилот-сигналов в системах на основе ОМРЧ, которые осуществляют передачу сигналов в частотной области, может оказаться более сложной.
На фиг.2 представлена блок-схема варианта осуществления блока 200 передатчика, который выполнен с возможностью реализации различных способов обработки, описываемых здесь. Блок 200 передатчика представляет собой вариант осуществления передающей части передающей системы 110, показанной на фиг.1. Блок 200 передатчика включает в себя: (1) процессор 114а данных ПЕР, который принимает и обрабатывает данные трафика и данные пилот-сигнала для обеспечения NT потоков символов модуляции; и (2) МВМВ-процессор 120а ПЕР, который осуществляет предварительное приведение к требуемым условиям потоков символов модуляции для обеспечения NT приведенных к требуемым условиям потоков символов модуляции. Процессор 114а данных ПЕР и МВМВ-процессор 120а ПЕР представляют собой один вариант осуществления процессора 114 данных ПЕР и МВМВ-процессора 120 ПЕР, соответственно показанных на фиг.1.
В конкретном варианте осуществления, показанном на фиг.2, процессор 114а данных ПЕР включает в себя кодер 212, канальный перемежитель 214 и элемент 216 отображения символов. Кодер 212 принимает и кодирует данные трафика (т.е. биты информации, di) в соответствии с одной или несколькими схемами кодирования, чтобы обеспечить кодированные биты. Кодирование повышает надежность передачи данных. В одном варианте осуществления, можно использовать отдельную схему кодирования битов информации для каждой собственной моды (или пространственного подканала), выбранной для передачи данных. В альтернативных вариантах осуществления, можно использовать отдельную схему кодирования для каждого подмножества пространственных подканалов, или для всех пространственных подканалов можно использовать общую схему кодирования. Используемая схема (используемые схемы) кодирования может (могут) определяться сигналами управления их контроллера 130 и могут быть выбраны на основании ИСК, принятой из принимающей системы. Каждая выбранная схема кодирования может предусматривать любую комбинацию контроля с использованием циклического избыточного кода (ЦИК), сверточного кодирования, турбокодирования, блочного кодирования и другого кодирования, или отсутствие кодирования вообще.
Канальный перемежитель 214 перемежает кодированные биты на основании одной или нескольких схем перемежения. В типичном случае, каждая выбранная схема кодирования связана с соответствующей схемой перемежения. Перемежение обеспечивает разнесение во времени для кодированных битов, позволяет передавать данные на основании среднего ОСШП каждого пространственного подканала, используемого для передачи данных, борется с замиранием, а также устраняет корреляцию между кодированными битами, используемыми для формирования каждого символа модуляции.
Затем элемент 216 отображения символов принимает и мультиплексирует данные пилот-сигнала с перемеженными данными, а также отображает мультиплексированные данные в соответствии с одной или несколькими схемами модуляции для обеспечения символов модуляции. Можно применять отдельную схему модуляции для каждого пространственного подканала, выбранного для использования, или для каждого подмножества пространственных подканалов. В альтернативном варианте, можно использовать общую схему модуляции для всех выбранных пространственных подканалов.
Отображения символов для каждого пространственного подканала можно достигать путем группирования множеств битов с целью формирования символов данных (каждый из которых может быть недвоичной величиной) и отображения каждого символа данных в точку в совокупности сигналов, соответствующей схеме модуляции, выбранной к использованию для этого пространственного подканала. Выбранная схема модуляции может быть схемой квадратурной фазовой манипуляции (КФМн (QPSK)), многоуровневой фазовой манипуляции (М-ФМн (M-PSK)), многоуровневой квадратурной амплитудной модуляции (М-КАМ (M-QAM)) или какой-либо другой схемой. Каждая отображенная точка сигнала представляет собой комплексную величину и соответствует символу модуляции. Элемент 216 отображения символов обеспечивает вектор символов модуляции для каждого периода символов, при этом количество символов модуляции в каждом векторе соответствует количеству пространственных подканалов, выбранных к использованию для этого периода символов. Таким образом, элемент 216 отображения символов выдает до NT потоков символов модуляции. Эти потоки совместно образуют последовательность векторов, которые также называют векторами s(n), при этом каждый вектор включает в себя до NS символов модуляции, передаваемых по пространственным каналам, количество которых составляет до NS, в течение n-го периода символов.
В МВМВ-процессоре 120а ПЕР отклик МВМВ-канала оценивается и используется для предварительного приведения к требуемым условиям символов модуляции перед передачей в принимающую систему. В системе дуплексной передачи с частотным разделением каналов (ДПЧР (FDD)-системе) нисходящей линии связи и восходящей линии связи распределяют различные полосы частот, а канальные отклики для нисходящей линии связи и восходящей линии связи не могут коррелировать в достаточной степени. В случае ДПЧР-системы, канальный отклик можно оценивать в приемнике и посылать обратно в передатчик. В системе дуплексной передачи с временным разделением каналов (ДПВР (TDD)-системе) нисходящая линия связи и восходящая линия связи совместно используют одну и ту же полосу частот в режиме мультиплексирования с частотным разделением каналов, и между канальными откликами нисходящей линии связи и восходящей линии связи может иметь место высокая степень корреляции. В случае ДПВР-системы, передающая система может оценивать канальный отклик восходящей линии связи (например, на основании пилот-сигнала, переданного принимающей системой по восходящей линии связи), а затем - получать канальный отклик нисходящей линии связи путем учета любых различий, таких, как различия между многообразиями передающих и принимающих антенных решеток.
В одном варианте осуществления оценки канального отклика выдаются в МВМВ-процессор 120а ПЕР в виде последовательности NR×NR матриц  (n) выборок во временной области. Эту последовательность матриц в совокупности называют матрицей канального импульсного отклика. (i, j)-й элемент hij матрицы оцененного канального импульсного отклика для i=(1, 2, ..., NR) и j=(1, 2, ..., NT) является последовательностью выборок, которая представляет собой выборочный импульсный отклик пути распространения от j-той передающей антенны до i-той принимающей антенны.
(n) выборок во временной области. Эту последовательность матриц в совокупности называют матрицей канального импульсного отклика. (i, j)-й элемент hij матрицы оцененного канального импульсного отклика для i=(1, 2, ..., NR) и j=(1, 2, ..., NT) является последовательностью выборок, которая представляет собой выборочный импульсный отклик пути распространения от j-той передающей антенны до i-той принимающей антенны.
Внутри МВМВ-процессора 120а ПЕР, блок 222 быстрого преобразования Фурье принимает (например, из принимающей системы) матрицу оцененного канального импульсного отклика и получает соответствующую матрицу  оцененного канального частотного отклика путем проведения быстрого преобразования Фурье (БПФ (FFT)) на матрице
оцененного канального частотного отклика путем проведения быстрого преобразования Фурье (БПФ (FFT)) на матрице  Это можно осуществить путем проведения NF-точечного БПФ на последовательности NF выборок для каждого элемента матрицы , чтобы получить множество NF коэффициентов для соответствующего элемента матрицы
Это можно осуществить путем проведения NF-точечного БПФ на последовательности NF выборок для каждого элемента матрицы , чтобы получить множество NF коэффициентов для соответствующего элемента матрицы  где NF соответствует количеству интервалов дискретизации по частоте, характерному для БПФ (т.е. соответствует «длине» БПФ). Таким образом, NR·NT элементов матрицы являются NR·NT множествами коэффициентов, представляющих частотные отклики путем распространения между NT передающими антеннами и NR принимающими антеннами. Каждый элемент матрицы является БПФ соответствующего элемента матрицы . Матрицу оцененного канального частотного отклика также можно рассматривать как множество из NF матриц
где NF соответствует количеству интервалов дискретизации по частоте, характерному для БПФ (т.е. соответствует «длине» БПФ). Таким образом, NR·NT элементов матрицы являются NR·NT множествами коэффициентов, представляющих частотные отклики путем распространения между NT передающими антеннами и NR принимающими антеннами. Каждый элемент матрицы является БПФ соответствующего элемента матрицы . Матрицу оцененного канального частотного отклика также можно рассматривать как множество из NF матриц  для k=(0, 1, ..., NF-1).
для k=(0, 1, ..., NF-1).
Собственное разложение канала
Затем блок 224 проводит собственное разложение МВМВ-канала, используемого для передачи данных. В одном варианте проведения собственного разложения канала, блок 224 вычисляет разложение на сингулярные значения (РСЗ (SVD)) матрицы оцененного канального частотного отклика. В одном варианте осуществления, разложение на сингулярные значения проводится для каждой матрицы для k=(0, 1, ..., NF-1). Разложение на сингулярные значения матрицы для интервала k дискретизации по частоте (или для частоты ƒk) можно выразить в виде:

где U(k) - унитарная матрица размером NR×NR (т.е. UHU=I, где I - единичная матрица с единицами на диагонали и нулями на всех остальных местах);
Λ(k) - имеющая размер NR×NT диагональная матрица сингулярных значений матрицы  и
и
V(k) - унитарная матрица размером NT×NT.
Диагональная матрица Λ(k) содержит неотрицательные действительные значения на диагонали (т.е. Λ(k)=diag(λ1(k), λ2(k), ..., λNт(k)) и нули на всех остальных местах. Числа λi(k) для i=(1, 2, ..., NT) называются сингулярными значениями матрицы  Разложение на сингулярные значения есть матричная операция, известная в данной области техники и описанная в различных первоисточниках. Одним таким первоисточником является книга Гильберта Стренга «Линейная алгебра и ее приложения», издательство «Академик Пресс» (Gilbert Strang, "Linear Algebra and Its Applications", Academic Press), второе издание, 1980, которая упоминается в данном описании для справок.
Разложение на сингулярные значения есть матричная операция, известная в данной области техники и описанная в различных первоисточниках. Одним таким первоисточником является книга Гильберта Стренга «Линейная алгебра и ее приложения», издательство «Академик Пресс» (Gilbert Strang, "Linear Algebra and Its Applications", Academic Press), второе издание, 1980, которая упоминается в данном описании для справок.
Результат разложения на сингулярные значения представляет собой три множества по NF матриц -  - где
- где  и т.д. При каждом значении k, U(k) является имеющей размер NR×NR унитарной матрицей левых собственных векторов матрицы
и т.д. При каждом значении k, U(k) является имеющей размер NR×NR унитарной матрицей левых собственных векторов матрицы  V(k) является имеющей размер NT×NT унитарной матрицей правых собственных векторов матрицы
V(k) является имеющей размер NT×NT унитарной матрицей правых собственных векторов матрицы  а Λ(k) является имеющей размер NR×NT диагональной матрицей сингулярных значений матрицы
а Λ(k) является имеющей размер NR×NT диагональной матрицей сингулярных значений матрицы 
В еще одном варианте проведения собственного разложения канала, блок 224 сначала получает квадратную матрицу R(k) в виде  Собственные значения квадратной матрицы R(k) в таком случае должны быть квадратами сингулярных значений матрицы
Собственные значения квадратной матрицы R(k) в таком случае должны быть квадратами сингулярных значений матрицы  а собственные векторы матрицы R(k) должны быть правыми собственными векторами матрицы
а собственные векторы матрицы R(k) должны быть правыми собственными векторами матрицы  или матрицы V(k). Разложение матрицы R(k) для получения собственных значений и собственных векторов известно в данной области техники и здесь не описывается. Аналогичным образом можно получить еще одну квадратную матрицу R'(k) в виде
или матрицы V(k). Разложение матрицы R(k) для получения собственных значений и собственных векторов известно в данной области техники и здесь не описывается. Аналогичным образом можно получить еще одну квадратную матрицу R'(k) в виде  Собственные значения квадратной матрицы R'(k) тоже должны быть квадратами сингулярных значений матрицы
Собственные значения квадратной матрицы R'(k) тоже должны быть квадратами сингулярных значений матрицы  а собственные векторы матрицы R'(k) должны быть левыми собственными векторами матрицы или матрицы U(k).
а собственные векторы матрицы R'(k) должны быть левыми собственными векторами матрицы или матрицы U(k).
Собственное разложение каналов используется для разложения МВМВ-канала на его собственные моды на частоте ƒk для каждого значения k=(0, 1, ..., NF-1). Ранг r(k) матрицы соответствует количеству собственных мод МВМВ-канала на частоте ƒk, которое соответствует количеству независимых каналов (т.е. количеству пространственных подканалов), имеющихся в интервале k дискретизации по частоте.
Как подробнее описано ниже, столбцы матрицы V(k) являются векторами управления, связанными с частотой ƒk, используемой в передатчике для элементов векторов s(n) символов модуляции. Соответственно, столбцы матрицы U(k) являются векторами управления, связанными с частотой ƒk, используемой в приемнике для элементов векторов r(n) принятых символов. Матрицы U(k) и V(k) для k=(0, 1, ..., NF-1) используются для ортогонализации потоков символов, переданных на собственных модах на каждой частоте ƒk. Когда эти матрицы используются для предварительного приведения к требуемым условиям потоков символов модуляции в передатчике и приведения к требуемым условиям потоков принятых символов в приемнике - либо в частотной области, либо во временной области, - результатом является полная ортогонализация потоков символов. Тогда это обеспечивает кодирование и/или модуляцию по отдельности для каждой собственной моды (а не для каждого интервала дискретизации), что может значительно упростить обработку в передатчике и приемнике.
Элементами на диагонали матрицы Λ(k) являются λij(k) для i={1, 2, ..., r(k)}, где r(k) - ранг матрицы  Столбцы матриц U(k) и V(k) - ui(k) и vi(k) соответственно являются решениями собственного уравнения, которое можно выразить в виде:
Столбцы матриц U(k) и V(k) - ui(k) и vi(k) соответственно являются решениями собственного уравнения, которое можно выразить в виде:
Три множества матриц - U(k), Λ(k) и V(k) - для k=(0, 1, ..., NF-1) могут быть представлены в двух формах - «сортированной» форме и «случайно упорядоченной» форме. В сортированной форме диагональные элементы каждой матрицы Λ(k) сортированы в убывающем порядке, так что λ11(k)≥λ22(k)≥...≥λrr(k), а их собственные векторы расположены в соответствующем порядке в матрицах U(k) и V(k). Сортированную форму обозначают подстрочными индексами s, т.е. Us(k), Λs(k) и Vs(k) для k=(0, 1, ..., NF-1).
В случайно упорядоченной форме упорядочение сингулярных значений и собственных векторов может быть случайным, а также независимым от частоты. Случайную форму обозначают подстрочными индексами r. Конкретная форма, выбранная для использования, сортированная или случайно упорядоченная, влияет на выбор собственных мод, предназначаемых для применения при передаче данных и в схеме кодирования и модуляции, используемой для каждой выбранной собственной моды.
Блок 230 вычисления весовых коэффициентов принимает множество диагональных матриц, Λ, которое содержит множество сингулярных значений (т.е. λ11(k), λ22(k), ..., λrr(k)) для каждого интервала дискретизации по частоте. Тогда блок 230 вычисления весовых коэффициентов получает множество весовых матриц, W, где W=[W(0) ... W(k) ... W(NF-1)]. Эти весовые матрицы используются для масштабирования векторов s(n) символов модуляции либо во временной, либо в частотной области, как описано ниже.
Блок 230 вычисления весовых коэффициентов включает в себя блок 232 инверсии канала и (по выбору) блок 234 анализа методом «заливки воды». Блок 232 инверсии канала получает множество весовых коэффициентов, wii, для каждой собственной моды, которое используется для борьбы с частотно-избирательным замиранием на этой собственной моде. Блок 234 анализа методом «заливки воды» получает множество масштабирующих значений, b, для собственных мод МВМВ-канала. Эти масштабирующие значения характеризуют мощности передачи, распределенные по собственным модам. Инверсия канала и «заливка воды» подробнее описаны ниже.
Инверсия канала
На фиг.3А представлена схема, которая графически иллюстрирует получение множества весовых коэффициентов, wii, используемых для инвертирования частотного отклика каждой собственной моды. Показано множество диагональных матриц, Λ(k) для k=(0, 1, ..., NF-1), расположенных в некотором порядке вдоль оси 310, которая представляет размер частоты. Сингулярные значения λii(k) для i=(1, 2, ..., NS) каждой матрицы Λ(k) расположены вдоль диагонали этой матрицы. Таким образом, ось 312 можно рассматривать как представляющую пространственный размер. Каждая собственная мода МВМВ-канала связана с множеством элементов {λii(k)} для k=(0, 1, ..., NF-1), которое характеризует частотный отклик этой собственной моды. Множество элементов {λii(k)} для каждой собственной моды представлено затененными прямоугольниками вдоль пунктирной линии 314. Для каждой собственной моды, которая подвергается частотно-избирательному замиранию, элементы {λii(k)} этой собственной моды могут оказаться разными при разных значениях k.
Поскольку частотно-избирательное замирание вызывает МСП, вредные влияния МСП можно смягчить «инвертированием» каждой собственной моды таким образом, что она оказывается постоянной по частоте в приемнике. Инверсию канала можно реализовать путем получения множества весовых коэффициентов {wii(k)} для k=(0, 1, ..., NF-1) для каждой собственной моды таким образом, что произведения весовых коэффициентов и соответствующих собственных значений (т.е. квадраты диагональных элементов) будут приблизительно постоянными при всех значениях k, что можно выразить в виде wii(k)·λii 2(k)=ai для k=(0, 1, ..., NF-1).
Для собственной моды i множество wii(k)=[wii(0) ... wii(k) ... wii(NF-1)]T весовых коэффициентов, предназначенных для NF интервалов дискретизации по частоте и используемых для инвертирования канала, можно вывести в виде:
 для k=(0, 1, ..., NF-1), (3)
для k=(0, 1, ..., NF-1), (3)
где ai - коэффициент нормализации, который можно выразить в виде:
 (4)
(4)
Как показано в уравнении (4), коэффициент нормализации ai определяется для каждой собственной моды на основании множества собственных значений (т.е. сингулярных значений, возведенных в квадрат), {λii 2(k)} для k=(0, 1, ..., NF-1), связанных с этой собственной модой. Коэффициент нормализации ai определяют так, что 
На фиг.3В показана схема, которая графически иллюстрирует зависимость между множеством весовых коэффициентов для некоторой заданной собственной моды и множеством собственных значений для этой моды. Для собственной моды i весовой коэффициент wii(k) для каждого интервала дискретизации по частоте обратно пропорционален собственному значению λii 2(k) для этого интервала дискретизации, как показано в уравнении (3). Чтобы спрямить параллельно оси абсцисс характеристику пространственного канала и минимизировать или уменьшить МСП, нежелательно проводить избирательное исключение мощности передачи на каком-либо интервале дискретизации по частоте. Множество из NF весовых коэффициентов для каждой собственной моды используют для того, чтобы масштабировать символы модуляции s(n) в частотной или временной области перед передачей на этой собственной моде.
Для сортированной упорядоченной формы сингулярные значения λii 2(k) для k=(1, 2, ..., NS) в каждой матрице Λ(k) сортируют таким образом, что диагональные элементы матрицы Λ(k) с меньшими индексами обычно оказываются больше. Тогда собственную моду 0 (которую часто называют основной собственной модой) можно связать с наибольшим сингулярным значением в каждой из NF диагональных матриц Λ(k), затем связать собственную моду 1 со вторым по величине сингулярным значением в каждой из NF диагональных матриц, и т.д. Таким образом, даже если инверсию канала проводят по всем NF интервалам дискретизации по частоте для каждой собственной моды, собственные моды с меньшими индексами не будут иметь так уж много «плохих» интервалов дискретизации (если такие интервалы дискретизации вообще будут). Следовательно, по меньшей мере, для собственных мод с меньшими индексами избыточная мощность передачи не будет использоваться для «плохих» интервалов дискретизации.
Инверсию канала можно проводить различными способами, предназначенными для осуществления инвертирования МВМВ-канала, и это находится в рамках объема притязаний изобретения. В одном варианте осуществления, инверсию канала проводят для каждой собственной моды, выбранной для использования. В еще одном варианте осуществления, инверсию канала можно проводить для некоторых собственных мод и не проводить для других собственных мод. Например, инверсию канала можно проводить для каждой собственной моды, которая характеризуется как вносящая избыточные МСП. Инверсию каналов также можно проводить динамически для некоторых или всех собственных мод, выбранных для использования, например, когда МВМВ-канал характеризуется как частотно-избирательный (например, на основании каких-нибудь определенных критериев).
Инверсия канала подробнее описана в заявке № 09/860274 на патент США, поданной 17 мая 2001 г., заявке № 09/881610 на патент США, поданной 14 июня 2001 г., и заявке № 09/892379 на патент США, поданной 26 июня 2001 г., причем все три заявки имеют название «Способ обработки данных для передачи в многоканальной системе связи с использованием избирательной инверсии канала и устройство для осуществления способа» ("Method and Apparatus for Processing Data for Transmission in a Multi-Channel Communication System Using Selective Channel Inversion"), переуступлены обладателю прав на настоящую заявку и упоминаются в данном описании для справок.
Метод «заливки воды»
В одном конкретном варианте осуществления анализ методом «заливки воды» проводится (если он вообще предусмотрен) по пространственному размеру таким образом, что происходит распределение большей мощности передачи тем собственным модам, у которых передаточные возможности больше. Распределение мощности методом «заливки воды» аналогично заливке фиксированного количества воды в сосуд с неровным дном, при этом каждая собственная мода соответствует некоторому месту на дне сосуда, а возвышение дна в любом заданном месте соответствует величине, обратной ОСШП, связанному с этой собственной модой. Таким образом, малое возвышение соответствует большому ОСШП и наоборот, большое возвышение соответствует малому ОСШП. Тогда суммарную доступную мощность передачи, Рсум, «заливают» в сосуд таким образом, что более низкие места в сосуде (т.е. те места, где ОСШП больше) заполняются первыми, а более высокие места (т.е. те места, где ОСШП меньше) заполняются позже. Константа Рзад характеризует уровень поверхности воды для сосуда после того, как «залита» вся суммарная доступная мощность передачи. Эту константу можно оценить сначала на основании различных параметров системы. Распределение мощности зависит от суммарной доступной мощности передачи и глубины сосуда вдоль поверхности дна. Места, где возвышения находятся над уровнем воды, не заполняются (т.е. собственные моды с ОСШП менее некоторого конкретного значения не используются для передачи данных).
В одном конкретном варианте осуществления, «заливку воды» вдоль размера частоты не проводят, потому что это обуславливает тенденцию к усилению частотной избирательности собственных мод, создаваемых путем разложения на собственные моды канала, описанного выше. «Заливку воды» можно проводить таким образом, что все собственные моды будут использоваться для передачи данных, или будет использоваться только подмножество собственных мод (а «плохие» собственные моды будут отброшены). Можно показать, что «заливка воды» по собственным модам, когда ее используют совместно с инверсией канала при сортировке сингулярных значений в убывающем порядке, может обеспечить почти оптимальные эксплуатационные параметры, одновременно снижая потребность в коррекции в приемнике.
«Заливку воды» можно проводить посредством блока 234 анализа методом «заливки воды» следующим образом. Сначала суммарную мощность на каждой собственной моде определяют в виде:
 (5)
(5)
Тогда ОСШП для каждой собственной моды можно определить в виде:
где σ2 - вариация принятого шума, которую также можно назвать мощностью принятого шума N0. Мощность принятого шума соответствует мощности шума на восстановленных символах в приемнике и является параметром, который может быть выдан приемником в передатчик в качестве части сообщаемой ИСК.
Тогда мощность передачи Рi, распределяемую каждой собственной моде, можно определить в виде:
 (7а)
(7а)
и
 (7b)
(7b)
где Pзад - константа, которую можно получить на основании различных параметров системы, а Рсум - суммарная мощность передачи, доступная для распределения по собственным модам.
Как показано в уравнении (7а), каждой собственной моде достаточного качества достается мощность передачи величиной  . Таким образом, собственным модам, у которых значения ОСШП больше, распределяются и большие мощности передачи. Постоянная Рзад определяет величины мощности передачи, распределяемые «лучшим» модам. Тогда это косвенно определяет, какие собственные моды выбраны для использования, потому что суммарная доступная мощность передачи ограничена, а распределение мощности ограничивается уравнением (7b).
. Таким образом, собственным модам, у которых значения ОСШП больше, распределяются и большие мощности передачи. Постоянная Рзад определяет величины мощности передачи, распределяемые «лучшим» модам. Тогда это косвенно определяет, какие собственные моды выбраны для использования, потому что суммарная доступная мощность передачи ограничена, а распределение мощности ограничивается уравнением (7b).
Таким образом, блок 234 анализа методом «заливки воды» принимает множество диагональных матриц Λ, и мощность принятого шума σ2. Матрицы Λ затем используются вместе с мощностью принятого шума для вывода вектора масштабирующих значений b=[b0...bi...bNs]T, где bi=Pi для i=(1, 2, ..., NS). Pi представляют собой решения уравнений (7а) и (7b) «заливки воды». Масштабирующие значения в b характеризуют мощности передачи, распределенные NS собственным модам, при этом собственным модам, количество которых равно нулю или больше, мощность передачи может быть не распределена.
На фиг.4 представлена блок-схема последовательности операций варианта осуществления процесса 400 распределения суммарной доступной мощности передачи по множеству собственных мод. Процесс 400, который является лишь одной конкретной реализацией метода «заливки воды», определяет мощности Рсум передачи для i∈I, распределяемые по собственным модам во множестве I, задаваемую суммарную мощность Рсум передачи, доступную в передатчике, множество суммарных мощностей Рi,λ собственных мод и принимаемую мощность шума σ2.
Сначала переменную n, используемую для обозначения номера итерации, задают равной единице (т.е. n=1) (этап 412). Для первой итерации множество I(n) определяют как включающее в себя все собственные моды для МВМВ-канала, или I(n)={1, 2, ..., NS} (этап 414). Затем определяют мощность (или длину) множества I(n) для текущей итерации n как Li(n)=|I(n)|, и эта мощность для первой итерации составляет Li(n)=NS (этап 416).
Затем определяют суммарную эффективную мощность Рэфф(n), распределяемую по собственным модам в множестве I(n) (этап 418). Эту суммарную эффективную мощность определяют как равную суммарной доступной мощности передачи, Рсум, плюс сумма величин, обратных ОСШП, для собственных мод в множестве I(n). Это можно выразить в виде:
 (8)
(8)
Затем распределяют суммарную доступную мощность передачи по модам во множестве I(n). Индекс i, используемый для обозначения итерации по собственным модам во множестве I(n), сначала задают равным единице (т.е., i=1) (этап 420). Затем (этап 422) определяют величину мощности передачи, распределяемую каждой собственной моде i, на основании следующего уравнения:
 (9)
(9)
На этапе 422 каждой собственной моде во множестве I(n) распределяют мощность передачи Pi. Этапы 424 и 426 являются частью цикла распределения мощности передачи каждой из собственных мод во множестве I(n).
Фиг.5А графически иллюстрирует распределение суммарной эффективной мощности Рэфф для возможной МВМВ-системы с тремя собственными модами. Каждая собственная мода имеет величину, обратную ОСШП, равную σ2/λii 2 для i={1, 2, 3}, что предполагает нормализованную мощность передачи, равную 1,0. Суммарная мощность передачи, доступная в передатчике, составляет Рсум=Р1+Р2+Р3 и представлена затененной зоной на фиг.5А. Суммарная эффективная мощность представлена зоной в затененных и не затененных областях на фиг.5А.
Хотя дно сосуда при реализации метода «заливки воды» и имеет неровную поверхность, уровень воды вверху остается постоянным по всему сосуду. Аналогично, как показано на фиг.5А, после распределения суммарной доступной мощности передачи Рсум по собственным модам окончательный уровень мощности остается постоянным на всех собственных модах. Этот окончательный уровень мощности определяют путем деления Рэфф(n) на количество Li(n) собственных мод во множестве I(n). Затем определяют величину мощности, выделяемую собственной моде i, путем вычитания величины, обратной ОСШП и составляющей σ2/λii 2 для этой собственной моды, из окончательного уровня мощности, составляющего Рэфф(n)/Li(n), задаваемого уравнением (9) и показанного на фиг.5А.
На фиг.5В показана ситуация, в которой распределение мощности методом «заливки воды» приводит к тому, что некоторая собственная мода получает отрицательную мощность. Это происходит, когда величина, обратная ОСШП, для этой собственной моды превышает окончательный уровень мощности, что выражается условием (Рэфф(n)/Li(n))<(σ2/Pi,λ).
Возвращаясь к фиг.4 отмечаем, что в конце распределения мощностей определяют, распределены ли отрицательные мощности каким-либо собственным модам (т.е. Рi<0) (этап 428). Если ответ - «да», то процесс продолжается путем удаления из множества I(n) всех собственных мод, которым распределены отрицательные мощности (этап 430). Индексу n придают приращение на единицу (т.е. n=n+1) (этап 432). Затем процесс возвращается к этапу 416, чтобы распределить суммарную доступную мощность передачи среди остающихся собственных мод во множестве I(n). Процесс продолжается до тех пор, пока всем собственным модам во множестве I(n) не будут распределены положительные мощности передачи, что определяется на этапе 428. Собственным модам, не принадлежащим множеству I(n), распределяется нулевая мощность.
Метод «заливки воды» также описал Роберт Дж. Галлагер в книге «Теория информации и надежная связь», изданной фирмой «Джон Уайли и сыновья» (Robert G. Gallager, "Information Theory and Reliable Communication," John Wiley and Sons), 1968, и упоминаемой в данном описании для справок. Конкретный алгоритм проведения базового процесса «заливки воды» для МВМВ-ОМРЧ-системы описан в заявке № 09/978337 на патент США под названием «Способ определения распределения мощности в МВМВ-системе связи и устройство для осуществления способа» ("Method and Apparatus for Determining Power Allocation in a MIMO Communication System"), поданной 15 октября 2001 г. Метод «заливки воды» также описан в заявке № 10/056275 на патент США под названием «Перераспределение избыточной мощности для систем со многими входами и многими выходами (МВМВ-систем), обладающих полной информацией о состоянии канала (ИСК)» ("Reallocation of Excess Power for Full Channel-State Information (CSI) Multiple-Input, Multiple-Output (MIMO) Systems"), поданной 23 января 2002 г. Эти заявки переуступлены обладателю прав на данную заявку и упоминаются в данном описании для справок.
Если «заливку воды» проводят для распределения суммарной доступной мощности передачи по собственным модам, то блок 234 анализа методом «заливки воды» выдает множество, состоящее из NS масштабирующих значений b={b0 ... bi ... bNs} для NS собственных мод. Каждое масштабирующее значение предназначено для соответствующей моды и используется для масштабирования множества весовых коэффициентов, определенных для этой собственной моды.
Для собственной моды i, множество весовых коэффициентов  используемых для инвертирования канала и масштабирования мощности передачи для собственной моды, можно представить в виде:
используемых для инвертирования канала и масштабирования мощности передачи для собственной моды, можно представить в виде:
 для k=(0, 1, ..., NF-1), (10)
для k=(0, 1, ..., NF-1), (10)
где коэффициент нормализации ai и масштабирующее значение bi выводят так, как описано выше.
Блок 230 вычисления весовых коэффициентов выдает множество весовых матриц  которые можно получить, воспользовавшись весовыми коэффициентами wii(k) или
которые можно получить, воспользовавшись весовыми коэффициентами wii(k) или  Каждая весовая матрица W(k) является диагональной матрицей, диагональные элементы которой состоят из весовых коэффициентов, вывод которых продемонстрирован выше. В частности, если проводится только одна инверсия канала, то каждая весовая матрица W(k) для k=(0, 1, ..., NF-1) определяется в виде:
Каждая весовая матрица W(k) является диагональной матрицей, диагональные элементы которой состоят из весовых коэффициентов, вывод которых продемонстрирован выше. В частности, если проводится только одна инверсия канала, то каждая весовая матрица W(k) для k=(0, 1, ..., NF-1) определяется в виде:
W(k)=diag(w11(k), w22(k), ..., wNsNs(k)), (11a)
где wii(k) получают так, как показано в уравнении (3). А если проводят и инверсию канала, и «заливку воды», то каждая весовая матрица W(k) для k=(0, 1, ..., NF-1) определяется в виде:

где  выводят, как показано в уравнении (10).
выводят, как показано в уравнении (10).
Возвращаясь снова к фиг.2, отмечаем, что блок 236 масштабирования и обратного быстрого преобразования Фурье (ОБПФ) принимает (1) множество унитарных матриц V, которые являются матрицами правых собственных векторов матрицы  и (2) множество весовых матриц W для всех NF интервалов дискретизации по частоте. Затем блок 236 масштабирования и ОБПФ получает матрицу Ptx пространственно-временного формирования импульсов для передатчика на основании принятых матриц. Сначала вычисляют корень квадратный из каждой весовой матрицы W(k), чтобы получить соответствующую матрицу
и (2) множество весовых матриц W для всех NF интервалов дискретизации по частоте. Затем блок 236 масштабирования и ОБПФ получает матрицу Ptx пространственно-временного формирования импульсов для передатчика на основании принятых матриц. Сначала вычисляют корень квадратный из каждой весовой матрицы W(k), чтобы получить соответствующую матрицу  элементы которой являются корнями квадратными из элементов матрицы W(k). Элементы весовых матриц W(k) для k=(0, 1, ..., NF-1) связаны с мощностью собственных мод. В таком случае взятие корня квадратного обеспечивает преобразование мощности с целью эквивалентного масштабирования сигналов. Затем для каждого интервала k дискретизации по частоте вычисляют произведение весовой матрицы
элементы которой являются корнями квадратными из элементов матрицы W(k). Элементы весовых матриц W(k) для k=(0, 1, ..., NF-1) связаны с мощностью собственных мод. В таком случае взятие корня квадратного обеспечивает преобразование мощности с целью эквивалентного масштабирования сигналов. Затем для каждого интервала k дискретизации по частоте вычисляют произведение весовой матрицы  корней квадратных и соответствующей унитарной матрицы V(k), чтобы получить матрицу произведения
корней квадратных и соответствующей унитарной матрицы V(k), чтобы получить матрицу произведения  Множество матриц произведения
Множество матриц произведения  которое также обозначают как
которое также обозначают как  определяет оптимальное или почти оптимальное пространственно-временное формирование, которое следует применить к векторам s(n) символов модуляции.
определяет оптимальное или почти оптимальное пространственно-временное формирование, которое следует применить к векторам s(n) символов модуляции.
Затем вычисляют обратное БПФ матрицы чтобы получить матрицу Ptx пространственно-временного формирования импульсов для передатчика, и это преобразование можно выразить в виде:

Матрица Ptx(n) формирования импульсов является матрицей размером NT×NT. Каждый элемент матрицы Ptx является множеством, которое состоит из NF временно-пространственных значений и получено посредством обратного БПФ множества значений для соответствующего элемента произведения матриц,  Каждый столбец матрицы Ptx(n) является вектором управления для соответствующего элемента вектора s(n).
Каждый столбец матрицы Ptx(n) является вектором управления для соответствующего элемента вектора s(n).
Конвольвер (блок свертки) 240 принимает и предварительно приводит к требуемым условиям векторы s(n) символов модуляции с помощью матрицы Ptx(n) формирования импульсов, чтобы обеспечить векторы x(n) переданных символов. Во временной области предварительное приведение к требуемым условиям представляет собой операцию свертки, а свертку векторов s(n) символов модуляции с матрицей Ptx(n) можно выразить в виде:
 (13)
(13)
Матричную свертку, указанную в уравнении (13), можно проводить следующим образом. Чтобы получить i-й элемент вектора x(n) для момента n, формируют xi(n), т.е. скалярное произведение i-й строки матрицы  на вектор
на вектор  для некоторого количества индексов задержки (например,
для некоторого количества индексов задержки (например,  а результаты суммируют с накоплением результата для получения элемента xi(n). Потоки предварительно приведенных к требуемым условиям символов, передаваемые на каждой передающей антенне (т.е. каждый элемент xi(n) вектора x(n)) формируются таким образом, что представляют собой взвешенную комбинацию потоков NR символов модуляции, а весовые коэффициенты определяются подходящим столбцом матрицы Ptx(n). Этот процесс повторяют таким образом, что каждый элемент вектора x(n) получается из соответствующего столбца матрицы Ptx(n) и вектора s(n).
а результаты суммируют с накоплением результата для получения элемента xi(n). Потоки предварительно приведенных к требуемым условиям символов, передаваемые на каждой передающей антенне (т.е. каждый элемент xi(n) вектора x(n)) формируются таким образом, что представляют собой взвешенную комбинацию потоков NR символов модуляции, а весовые коэффициенты определяются подходящим столбцом матрицы Ptx(n). Этот процесс повторяют таким образом, что каждый элемент вектора x(n) получается из соответствующего столбца матрицы Ptx(n) и вектора s(n).
Каждый элемент вектора x(n) соответствует последовательности предварительно приведенных к требуемым условиям символов, передаваемых посредством соответствующей передающей антенны. NT последовательностей предварительно приведенных к требуемым условиям символов совместно образуют последовательность векторов, которые также называют векторами x(n) переданных символов, причем каждый такой вектор включает в себя до NT предварительно приведенных к требуемым условиям символов, передаваемых с передающих антенн, количество которых может достигать NT, за n-й период символов. Эти NT последовательностей, предварительно приведенных к требуемым условиям символов, выдаются в передатчики 122а-122t и обрабатываются для получения NT модулированных сигналов, которые затем передаются с антенн 124а-124t соответственно.
Вариант осуществления, показанный на фиг.2, обуславливает проведение пространственно-временного управления лучом для векторов s(n) символов модуляции. Это управление лучом можно также проводить в частотной области. Это можно сделать, воспользовавшись такими способами, как способ перекрытия и присоединения, хорошо известными в области цифровой обработки сигналов, для реализации фильтров с конечной импульсной характеристикой (КИХ-фильтров) в частотной области. В этом случае, каждую из последовательностей, которые образуют элементы матрицы Ptx(n) для n=(0, 1, ..., NF-1), дополняют нулями в количестве NO-NF, что приводит к получению матрицы qtx(n) для n=(0, 1, ..., NO-1). Затем вычисляют NO-точечное быстрое преобразование Фурье (NO-точечное БПФ) для каждой дополненной нулями последовательности в матрице qtx(n), что приводит к получению матрицы Qtx(k) для k=(0, 1, ..., NO-1).
Кроме того, каждую из последовательностей символов модуляции, которые представляют собой элементы вектора s(n), разделяют на субпоследовательности длиной NSS=NO-NF+1. Затем каждую субпоследовательность дополняют нулями в количестве NF-1, чтобы обеспечить соответствующий вектор длиной NO. Последовательности векторов s(n) обрабатывают так, чтобы получить последовательности  (n) векторов длиной NO, где подстрочный индекс
(n) векторов длиной NO, где подстрочный индекс  является индексом для векторов, которые соответствуют дополненным нулями субпоследовательностям. Затем вычисляют NO-точечное быстрое преобразование Фурье для каждой из дополненных нулями субпоследовательностей, что приводит к получению последовательности векторов,
является индексом для векторов, которые соответствуют дополненным нулями субпоследовательностям. Затем вычисляют NO-точечное быстрое преобразование Фурье для каждой из дополненных нулями субпоследовательностей, что приводит к получению последовательности векторов,  (k), в частотной области для разных значений . Каждый вектор (k) для некоторого заданного включает в себя множество векторов в частотной области, имеющих длину NO (т.е. для k=(0, 1, ..., NO-1). Затем матрицу Qtx(k) перемножают с вектором (k) для каждого значения , причем проводят предварительное перемножение для каждого значения k, т.е. для k=(0, 1, ..., NO-1).
(k), в частотной области для разных значений . Каждый вектор (k) для некоторого заданного включает в себя множество векторов в частотной области, имеющих длину NO (т.е. для k=(0, 1, ..., NO-1). Затем матрицу Qtx(k) перемножают с вектором (k) для каждого значения , причем проводят предварительное перемножение для каждого значения k, т.е. для k=(0, 1, ..., NO-1).
Затем вычисляют обратные БПФ для матрично-векторного произведения  чтобы получить множество субпоследовательностей во временной области, имеющих длину NO. Затем осуществляют «повторную сборку» этих субпоследовательностей в соответствии с методом перекрытия и присоединения или аналогичным средством, как известно в данной области техники, чтобы сформировать желаемые выходные последовательности.
чтобы получить множество субпоследовательностей во временной области, имеющих длину NO. Затем осуществляют «повторную сборку» этих субпоследовательностей в соответствии с методом перекрытия и присоединения или аналогичным средством, как известно в данной области техники, чтобы сформировать желаемые выходные последовательности.
На фиг.6 представлена блок-схема последовательности операций варианта осуществления процесса 600, который может быть проведен в блоке передатчика для реализации различных способов обработки передачи, описываемых здесь. Сначала передаваемые данные (например, биты информации) обрабатывают в соответствии с некоторой конкретной схемой обработки, чтобы обеспечить некоторое количество потоков символов модуляции (этап 612). Как отмечалось выше, схема обработки может включать в себя одну или несколько схем кодирования и одну или несколько схем модуляции (например, схему кодирования и модуляции по отдельности для каждого потока символов модуляции).
Затем получают матрицу оцененного канального отклика для МВМВ-канала (этап 614). Эта матрица может быть матрицей оцененного канального импульсного отклика или матрицей  оцененного канального частотного отклика, которые могут быть выданы в передатчик из приемника. Затем осуществляют разложение (например, посредством собственного разложения канала) матрицы оцененного канального отклика, чтобы получить множество матриц правых собственных векторов
оцененного канального частотного отклика, которые могут быть выданы в передатчик из приемника. Затем осуществляют разложение (например, посредством собственного разложения канала) матрицы оцененного канального отклика, чтобы получить множество матриц правых собственных векторов  и множество матриц сингулярных значений
и множество матриц сингулярных значений  (этап 616).
(этап 616).
Затем получают некоторое количество множеств весовых коэффициентов wii, на основании матриц сингулярных значений (этап 618). Для каждой собственной моды, используемой для передачи данных, можно получить одно множество весовых коэффициентов. Эти весовые коэффициенты используют для уменьшения или минимизации межсимвольных помех в приемнике путем инвертирования частотного отклика каждой собственной моды, выбранной для использования.
На основании матриц сингулярных значений можно также получить множество масштабирующих значений b (этап 620). Этап 620 является необязательным, о чем свидетельствует отображение этапа 620 на фиг.6 в виде прямоугольника, очерченного пунктирной линией. Масштабирующие значения можно получить посредством анализа методом «заливки воды», и они используются для регулирования мощностей передачи для выбранных собственных мод.
Затем получают матрицу Ptx(n) формирования импульсов на основании матриц правых собственных векторов множеств весовых коэффициентов wii, и множества b масштабирующих значений (если они есть) (этап 622). Затем на основании матрицы формирования импульсов предварительно приводят к требуемым условиям (либо во временной области, либо в частотной области) потоки символов модуляции, чтобы обеспечить некоторое количество потоков, предварительно приведенных к требуемым условиям символов модуляции x(n), передаваемых по МВМВ-каналу (этап 624).
Обработка передачи во временной области с разложением на собственные моды канала описана подробнее в заявке № 10/017038 на патент США под названием «Обработка передачи и приема во временной области с разложением на собственные моды канала для МВМВ-систем» ("Time-Domain Transmit and Receive Processing with Channel Eigen-mode Decomposition for MIMO Systems"), поданной 7 декабря 2001 г., переуступленной обладателю прав на данную заявку и упоминаемой в этом описании для справок.
На фиг.7 представлена блок-схема варианта осуществления приемника 700, выполненного с возможностью реализации различных способов обработки передачи, описываемых здесь. Блок 700 приемника представляет собой вариант осуществления принимающей части принимающей системы 150, показанной на фиг.1. Блок 700 приемника включает в себя (1) МВМВ-процессор 160а ПРИ, который обрабатывает NR потоков принятых сигналов для обеспечения NT потоков восстановленных символов, и (2) процессор 162а данных ПРИ, который демодулирует, подвергает обращенному перемежению и декодирует восстановленные символы для обеспечения декодированных битов. МВМВ-процессор 160а ПРИ и процессор 162а данных ПРИ являются одним вариантом осуществления МВМВ-процессора 160 ПРИ и процессора 162 данных ПРИ, соответственно показанных на фиг.1.
Возвращаясь к фиг.1, отмечаем, что переданные сигналы от NT передающих антенн принимаются каждой из NR антенн 152а-152r. Принятый сигнал от каждой антенны направляется в соответствующий приемник 154, который также называют коммуникационным процессором. Каждый приемник 154 приводит соответствующий принятый сигнал к требуемым условиям (например, фильтрует, усиливает и преобразует этот сигнал с понижением частоты), а затем преобразует в цифровую форму приведенный к требуемым условиям сигнал, чтобы обеспечить выборки, преобразованные из аналоговой формы в цифровую (АЦП-выборки). Каждый приемник 154 может дополнительно подвергнуть АЦП-выборки демодуляции данных с помощью восстановленного пилот-сигнала, чтобы обеспечить соответствующий поток восстановленных символов. Таким образом, приемники 154а-154r обеспечивают потоков по NR принятых символов. Эти потоки совместно образуют последовательность векторов, которые называют векторами r(n) принятых символов, причем каждый такой вектор включает в себя NR принятых символов из NR приемников 154 за n-ый период символов. Векторы r(n) принятых символов затем выдаются в МВМВ-процессор 160а ПРИ.
Внутри МВМВ-процессора 160а ПРИ блок 712 канальной оценки принимает векторы r(n) и строит матрицу оцененного канального импульсного отклика, которая может быть послана обратно в передающую систему и использована при обработке передачи. Затем блок 714 БПФ проводит БПФ на матрице оцененного канального импульсного отклика, чтобы получить матрицу  оцененного канального частотного отклика (т.е.
оцененного канального частотного отклика (т.е. 
Затем блок 716 проводит собственное разложение канала на матрице для каждого интервала k дискретизации по частоте, чтобы получить соответствующую матрицу U(k) левых собственных векторов. Каждый столбец матрицы  где
где  является вектором управления для соответствующего элемента вектора r(n) и используется для ортогонализации потоков принятых символов. Затем блок 718 ОБПФ проводит обратное ПБФ матрицы чтобы получить матрицу u(n) пространственно-временного формирования импульсов для системы приемника.
является вектором управления для соответствующего элемента вектора r(n) и используется для ортогонализации потоков принятых символов. Затем блок 718 ОБПФ проводит обратное ПБФ матрицы чтобы получить матрицу u(n) пространственно-временного формирования импульсов для системы приемника.
Затем конвольвер 720 приводит к требуемым условиям векторы r(n) принятых символов, подвергая матрицу u(n) пространственно-временного формирования импульсов сопряженной транспозиции, результатом которой является матрица uH(n) для получения векторов  восстановленных символов, которые являются оценками векторов s(n) символов модуляции. Во временной области приведение к требуемым условиям представляет собой операцию свертки, которую можно выразить в виде:
восстановленных символов, которые являются оценками векторов s(n) символов модуляции. Во временной области приведение к требуемым условиям представляет собой операцию свертки, которую можно выразить в виде:
 (14)
(14)
Формирование импульсов в приемнике также можно проводить в частотной области, аналогично тому, как это описано выше для приемника. В этом случае, каждую из NR последовательностей принятых символов, которые предназначены для NR принимающих антенн и образуют последовательность векторов r(n) принятых символов, делят на субпоследовательности длиной по NSS принятых символов, а каждую субпоследовательность дополняют нулями, чтобы обеспечить соответствующий вектор длиной NO. NR последовательностей векторов r(n) обрабатывают так, чтобы получить NR последовательностей  (n) векторов длиной NO, где подстрочный индекс является индексом для векторов, которые соответствуют дополненным нулями субпоследовательностям. Затем проводят БПФ каждой дополненной нулями субпоследовательности, что приводит к получению последовательности векторов,
(n) векторов длиной NO, где подстрочный индекс является индексом для векторов, которые соответствуют дополненным нулями субпоследовательностям. Затем проводят БПФ каждой дополненной нулями субпоследовательности, что приводит к получению последовательности векторов,  (k), во временной области для разных значений
(k), во временной области для разных значений  Каждый вектор (k) для некоторого заданного включает в себя множество векторов в частотной области, имеющих длину NO (т.е. для k=(0, 1, ..., NO-1).
Каждый вектор (k) для некоторого заданного включает в себя множество векторов в частотной области, имеющих длину NO (т.е. для k=(0, 1, ..., NO-1).
Матрицу uH(n), полученную в результате сопряженной транспозиции матрицы пространственно-временного формирования импульсов, также дополняют нулями и подвергают БПФ, чтобы получить матрицу  в частотной области для k=(0, 1, ..., NO-1). Затем проводят предварительное умножение вектора (k) для каждого значения на сопряженно транспонированную матрицу (где предварительное умножение проводят для каждого значения k, т.е. для k=(0, 1, ..., NO-1), чтобы получить соответствующий вектор
в частотной области для k=(0, 1, ..., NO-1). Затем проводят предварительное умножение вектора (k) для каждого значения на сопряженно транспонированную матрицу (где предварительное умножение проводят для каждого значения k, т.е. для k=(0, 1, ..., NO-1), чтобы получить соответствующий вектор  (k). Каждый вектор (k), который включает в себя множество находящихся во временной области векторов длиной NO, можно затем преобразовать посредством обратного БПФ, чтобы обеспечить соответствующее множество субпоследовательностей во временной области, имеющих длину NO. Затем осуществляют повторную сборку полученных субпоследовательностей в соответствии с методом перекрытия и присоединения или аналогичным средством, как известно в данной области техники, чтобы получить последовательности восстановленных символов, что соответствует получению множества векторов восстановленных символов,
(k). Каждый вектор (k), который включает в себя множество находящихся во временной области векторов длиной NO, можно затем преобразовать посредством обратного БПФ, чтобы обеспечить соответствующее множество субпоследовательностей во временной области, имеющих длину NO. Затем осуществляют повторную сборку полученных субпоследовательностей в соответствии с методом перекрытия и присоединения или аналогичным средством, как известно в данной области техники, чтобы получить последовательности восстановленных символов, что соответствует получению множества векторов восстановленных символов, 
Таким образом, вектора  восстановленных символов можно охарактеризовать как свертку во временной области следующим образом:
восстановленных символов можно охарактеризовать как свертку во временной области следующим образом:

где Г() - обратное БПФ матрицы  (k)=Λ(k)
(k)=Λ(k) и
и
 - принятый шум, преобразованный с помощью матрицы
- принятый шум, преобразованный с помощью матрицы  пространственно-временного преобразования импульсов.
пространственно-временного преобразования импульсов.
Матрица Г(n) является диагональной матрицей собственных импульсов, полученной из множества матриц  , где =[(0)...(k)...(NF-1)]. В частности, каждый диагональный элемент матрицы Г(n) соответствует собственному импульсу, который получают как ОБПФ множества сингулярных значений [
, где =[(0)...(k)...(NF-1)]. В частности, каждый диагональный элемент матрицы Г(n) соответствует собственному импульсу, который получают как ОБПФ множества сингулярных значений [ (0)...(k)...(NF-1)]T для соответствующего элемента множества .
(0)...(k)...(NF-1)]T для соответствующего элемента множества .
Возможность двух форм упорядочения сингулярных значений - «сортированной» формы и «случайно упорядоченной» формы приводит к двум разным типам собственных импульсов. Для сортированной формы результирующая матрица Гs(n) собственных импульсов является диагональной матрицей импульсов, которые сортированы в убывающем порядке содержания энергии. Импульс, соответствующий первому диагональному элементу {Гs(n)11} матрицы собственных векторов, имеет наибольшую энергию, а импульсы, соответствующие элементам, следующим далее вниз по диагонали, имеют постепенно убывающую энергию. Кроме того, когда ОСШП является достаточно малым, результаты, полученные методом «заливки воды», приводят к тому, что некоторые из интервалов дискретизации по частоте, имеющие малую энергию или не имеющие ее вовсе, устраняются из наименьших собственных импульсов первыми. Таким образом, при малых ОСШП один или несколько собственных импульсов могут иметь малую энергию или не иметь ее вовсе. Это дает преимущество, заключающееся в том, что при малых ОСШП кодирование и модуляция упрощаются за счет уменьшения количества ортогональных подканалов. Однако для того чтобы достичь надлежащей емкости канала, кодирование и модуляцию проводят отдельно для каждого собственного импульса.
Случайно упорядоченную форму сингулярных значений в частотной области можно использовать для дополнительного упрощения кодирования и модуляции (т.е. для того, чтобы избежать сложности кодирования и модуляции по отдельности для каждого элемента матрицы собственных импульсов). В случайно упорядоченной форме для каждого интервала дискретизации по частоте проводят случайное упорядочение сингулярных значений вместо упорядочения, основанного на их амплитуде или длительности. Это случайное упорядочение может привести к приблизительно одинаковой энергии во всех собственных импульсах. Когда ОСШП является достаточно малым, чтобы это привело к появлению интервалов дискретизации по частоте, имеющих малую энергию или не имеющих ее вовсе, эти интервалы дискретизации рассеяны приблизительно равномерно по собственным модам, так что количество собственных импульсов с ненулевой энергией является одним и тем же, независимо от ОСШП. При больших ОСШП произвольно упорядоченная форма дает преимущество, заключающееся в том, что все собственные импульсы имеют приблизительно одинаковую энергию, и в этом случае не требуется проводить кодирование и модуляцию по отдельности для разных собственных мод.
Если отклик МВМВ-канала является частотно-избирательным, то элементы диагональных матриц Λ(k) являются рассеянными во времени. Однако из-за предварительной обработки, проводимой в передатчике с целью инвертирования канала, результирующие последовательности восстановленных символов  имеют малые межсимвольные помехи, если инверсия каналов проводится эффективно. В этом случае в приемнике не должна потребоваться дополнительная коррекция для достижения высоких эксплуатационных параметров.
имеют малые межсимвольные помехи, если инверсия каналов проводится эффективно. В этом случае в приемнике не должна потребоваться дополнительная коррекция для достижения высоких эксплуатационных параметров.
Если инверсия канала неэффективна (например, из-за неточной матрицы  оцененного канального частотного отклика), то можно использовать блок коррекции, чтобы скорректировать восстановленные символы
оцененного канального частотного отклика), то можно использовать блок коррекции, чтобы скорректировать восстановленные символы  перед демодуляцией и декодированием. Для коррекции потоков восстановленных символов можно использовать блоки коррекции различных типов, включая блок линейной коррекции погрешностей по методу наименьших средних квадратов (БЛКМНСК (MMSE-LE)), блок коррекции с обратной связью по решению (БКОСР (DFE)), блок оценки последовательностей по критерию максимального правдоподобия (БОПКМП (MLSE)), и т.п.
перед демодуляцией и декодированием. Для коррекции потоков восстановленных символов можно использовать блоки коррекции различных типов, включая блок линейной коррекции погрешностей по методу наименьших средних квадратов (БЛКМНСК (MMSE-LE)), блок коррекции с обратной связью по решению (БКОСР (DFE)), блок оценки последовательностей по критерию максимального правдоподобия (БОПКМП (MLSE)), и т.п.
Такой процесс ортогонализации в передатчике и приемнике приводит к получению развязанных (т.е. ортогональных) потоков восстановленных символов в приемнике, вследствие чего значительно снижается сложность коррекции, необходимой для развязанных потоков символов. Коррекцию можно проводить так, как это описано в вышеупомянутой заявке № 10/017038 на патент США, а также в заявке № 09/993087 на патент США под названием «Система связи множественного доступа со многими входами и многими выходами (МВМВ-система связи множественного доступа)» ("Multiple-Access Multiple-Input Multiple-Output (MIMO) System"), поданной 6 ноября 2001 г., которая переуступлена обладателю прав на данную заявку и упоминается в этом описании для справок.
Для варианта осуществления, показанного на фиг.7, векторы восстановленных символов выдаются в процессор 162 данных ПРИ. Внутри процессора 162а элемент 732 обращенного отображения символов демодулирует каждый восстановленный символ в векторе в соответствии со схемой демодуляции, которая является дополняющей по отношению к схеме модуляции, использованной для этого символа в передающей системе. Демодулированные данные из элемента 732 обращенного отображения символов затем подвергаются обращенному перемежению посредством блока 734 обращенного перемежения. Данные, подвергнутые обращенному перемежению, затем декодируются декодером 736 для получения декодированных битов
в соответствии со схемой демодуляции, которая является дополняющей по отношению к схеме модуляции, использованной для этого символа в передающей системе. Демодулированные данные из элемента 732 обращенного отображения символов затем подвергаются обращенному перемежению посредством блока 734 обращенного перемежения. Данные, подвергнутые обращенному перемежению, затем декодируются декодером 736 для получения декодированных битов  , которые являются оценками переданных битов di. Обращенное перемежение и декодирование проводят как операции, дополняющие по отношению к перемежению и кодированию, соответственно проведенным в передающей системе. Например, в качестве декодера 736 можно использовать турбодекодер или декодер Витерби, если в передающей системе проводится соответственно турбокодирование или сверточное кодирование.
, которые являются оценками переданных битов di. Обращенное перемежение и декодирование проводят как операции, дополняющие по отношению к перемежению и кодированию, соответственно проведенным в передающей системе. Например, в качестве декодера 736 можно использовать турбодекодер или декодер Витерби, если в передающей системе проводится соответственно турбокодирование или сверточное кодирование.
На фиг.8 представлена блок-схема последовательности операций процесса 800, который может быть проведен в блоке приемника для реализации различных способов обработки приема, описываемых здесь. Сначала получают матрицу оцененного канального отклика для МВМВ-канала (этап 812). Эта матрица может быть матрицей оцененного канального импульсного отклика или матрицей оцененного канального частотного отклика. Матрицу или можно получить, например, на основании символов пилот-сигнала, переданных по МВМВ-каналу. Затем эту матрицу оцененного канального отклика разлагают (например, посредством собственного разложения канала), чтобы получить множество матриц левых собственных векторов  (этап 814).
(этап 814).
Затем получают матрицу u(n) формирования импульсов на основании матриц левых векторов (этап 816). Затем на основании матрицы u(n) формирования импульсов приводят к требуемым условиям (либо во временной области, либо в частотной области) потоки принятых символов, чтобы получить потоки восстановленных символов (этап 818). Восстановленные символы в дальнейшем обрабатывают в соответствии с некоторой конкретной схемой обработки, которая является дополняющей по отношению к схеме обработки, используемой в передатчике, для обеспечения декодированных данных (этап 820).
Обработка приема во временной области с разложением на собственные моды канала подробнее описана в вышеупомянутой заявке № 10/017038 на патент США.
Способы обработки передачи данных в передатчике и приемнике, описанные здесь, могут быть реализованы в различных системах беспроводной связи, включая - но не в ограничительном смысле - МВМВ-системы или МДКР-системы. Эти способы также можно использовать для прямой линии связи и/или обратной линии связи.
Описанные здесь способы обработки передачи данных в передатчике и приемнике можно реализовать различными средствами. Например, эти способы можно воплотить в средствах аппаратного обеспечения, средствах программного обеспечения, или в комбинации этих средств. При воплощении в средствах аппаратного обеспечения, элементы, используемые для проведения различных этапов обработки сигналов в передатчике (например, с целью кодирования и модулирования данных, разложения матрицы канального отклика, получения весовых коэффициентов для инвертирования канала, получения масштабирующих значений для распределения мощностей, получения матрицы формирования импульсов передатчика, предварительного приведения к требуемым условиям символов модуляции, и т.п.) или в приемнике (например, с целью разложения матрицы канального отклика, получения матрицы формирования импульсов приемника, приведения к требуемым условиям принятых символов, демодуляции и декодирования восстановленных символов, и т.п.), можно реализовать в одной или нескольких интегральных схемах прикладной ориентации (ИСПО (ASICs)), одном или нескольких цифровых процессоров сигналов (ЦПС (DSPs)), устройств цифровой обработки сигналов (УЦОС (DSPDs)), программируемых логических устройств (ПЛУ (PLDs)), вентильных матриц, программируемых во время эксплуатации (ВМПВЭ (FPGAs)), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других электронных блоков, предназначенных для выполнения описанных здесь функций, или их комбинации.
Для воплощения в средствах программного обеспечения, некоторые или все этапы обработки сигналов в каждом из передатчика и приемника можно реализовать с помощью модулей (например, процедур, функций, и т.п.), которые выполняют описанные здесь функции. Коды программного обеспечения могут храниться в запоминающем блоке (например, в памятях 132 и 172, показанных на фиг.1) и исполняться процессором (например, контроллерами 130 и 170). Запоминающий блок может быть реализован внутри процессора или вне процессора, и в этом случае его можно подключить с возможностью осуществления связи к процессору с помощью подходящих средств, как известно в данной области техники.
Предшествующее описание предложенных вариантов осуществления приведено для того, чтобы дать любому специалисту в данной области техники возможность практически реализовать или использовать настоящее изобретение. Специалисты в данной области техники легко поймут, что в эти варианты осуществления можно внести различные изменения, а общие принципы, описанные здесь, можно в рамках объема изобретения применить к другим вариантам его осуществления. Таким образом, не следует считать настоящее изобретение сводящимся к продемонстрированным здесь вариантам его осуществления, а толковать его в самом широком смысле и в соответствии с принципами и новыми признаками, приведенными в данном описании.
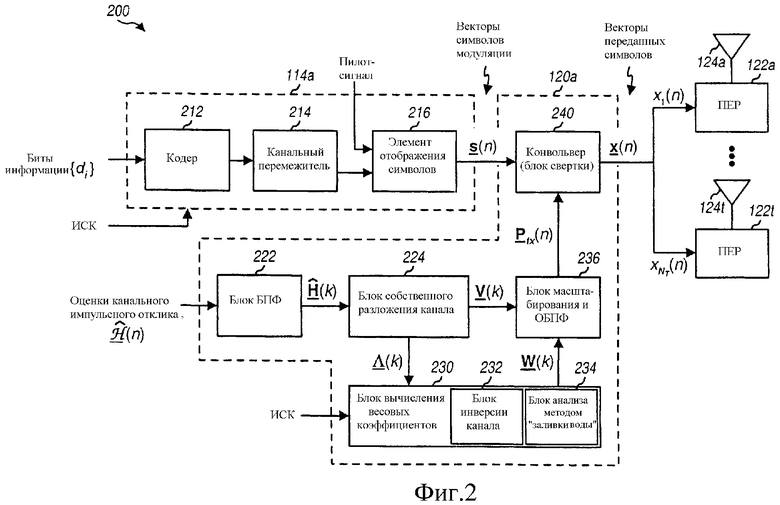
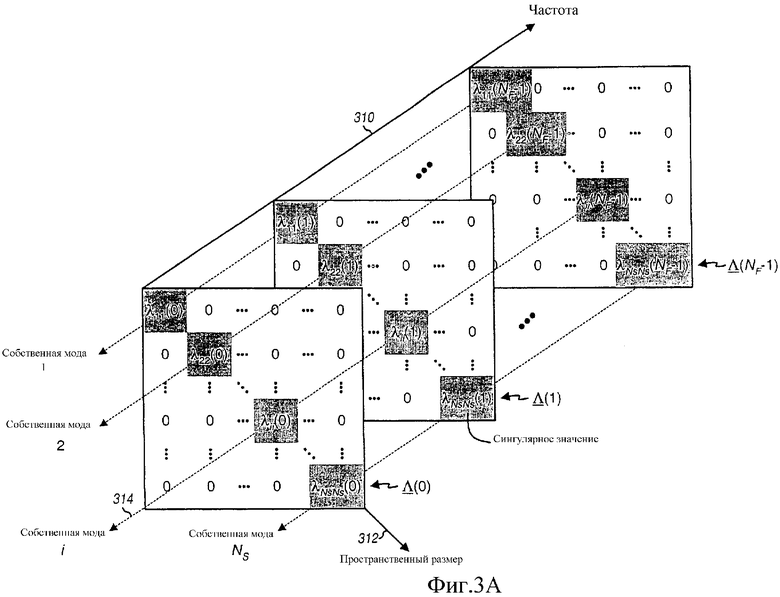
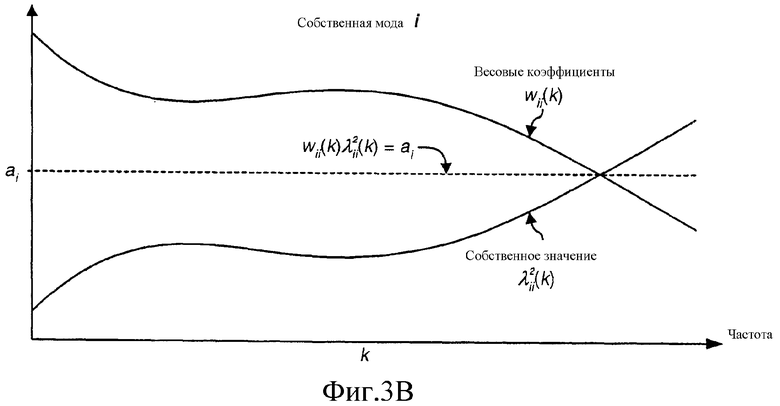
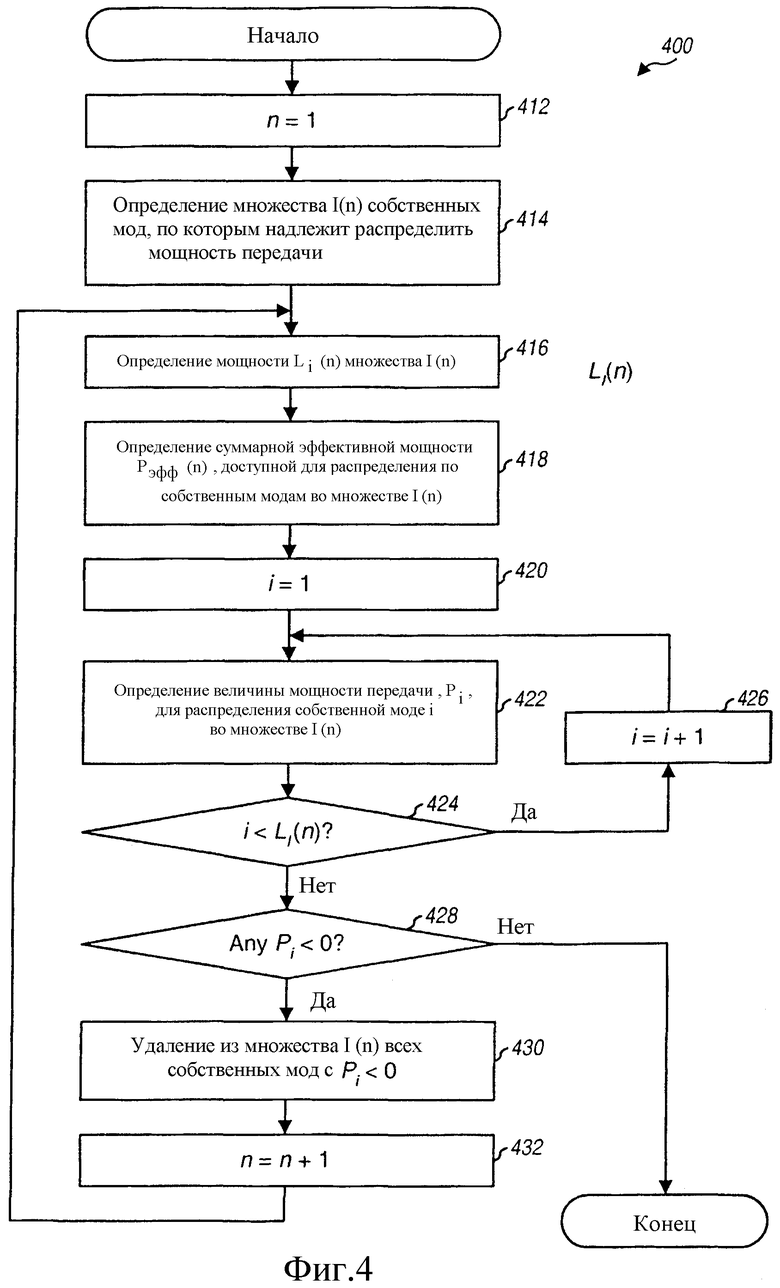
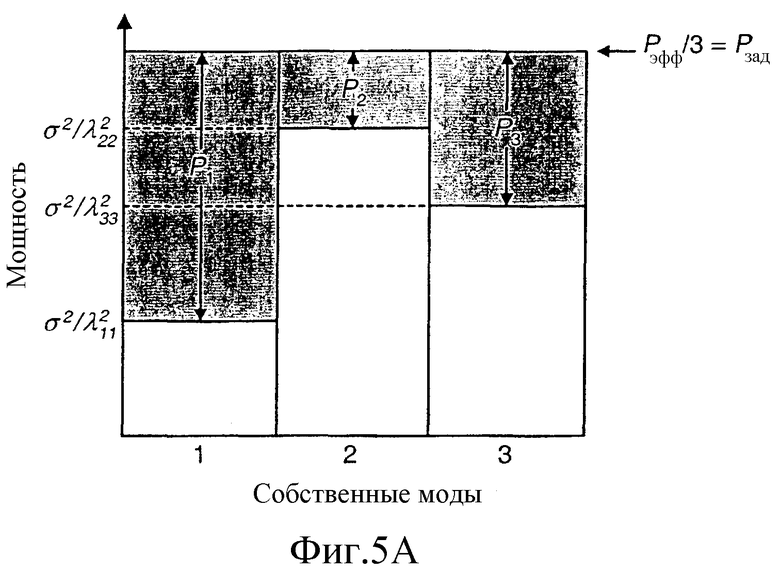
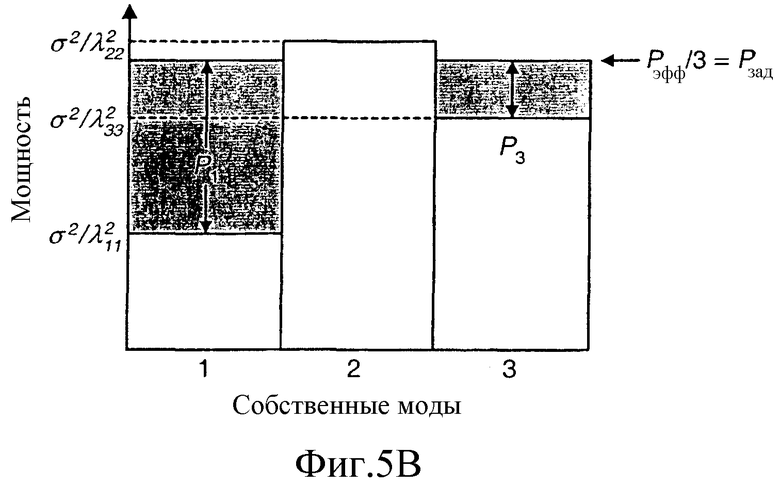
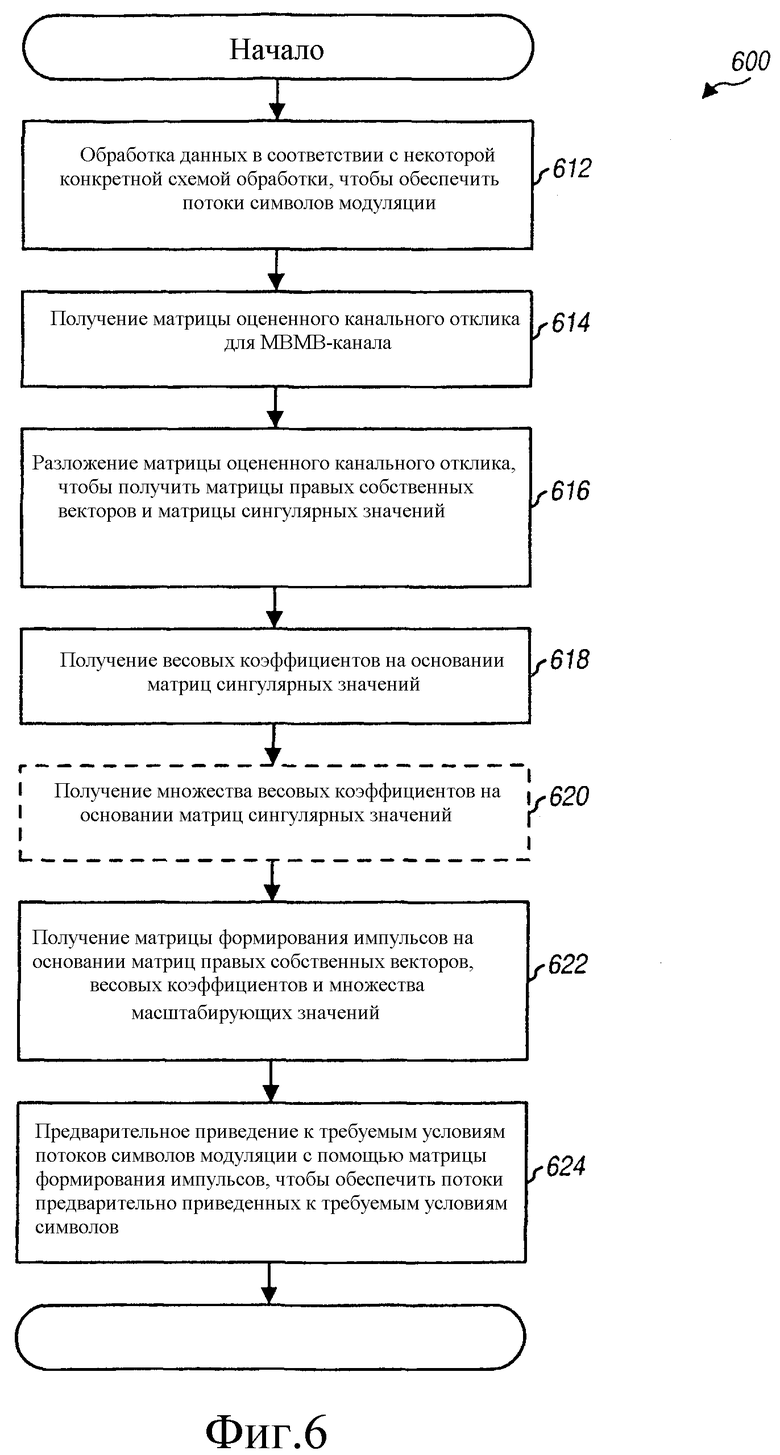
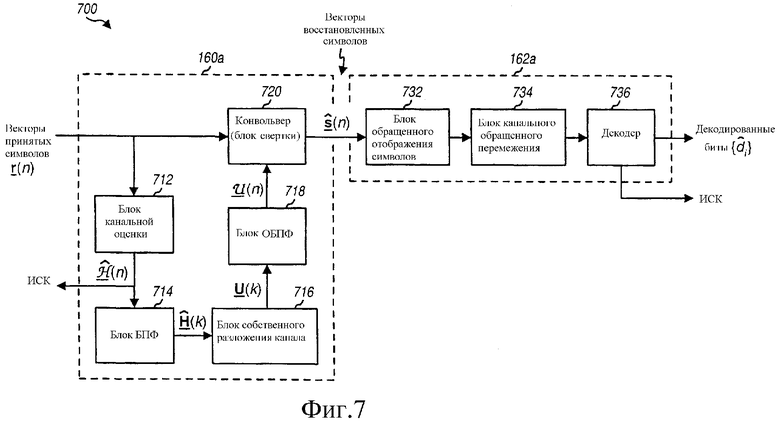

Изобретение относится к области передачи данных. Достигаемый технический результат - обеспечение высокой пропускной способности. Предложены способы обработки передачи данных в передатчике и приемнике с использованием собственного разложения канала, инверсии канала. В передатчике проводят собственное разложение канала, чтобы определить собственные моды МВМВ-канала и получить первое множество векторов управления; проводят инверсию канала, чтобы получить весовые коэффициенты, например, одно множество для каждой собственной моды, используемые для минимизации искажений, вносимых межсимвольными помехами, получают масштабирующие значения, характеризующие мощности передачи, распределяемые по собственным модам, при этом первое множество векторов управления, весовые коэффициенты и масштабирующие значения используются для получения матрицы формирования импульсов, которая используется для предварительного приведения к требуемым условиям символов модуляции перед передачей. В приемнике проводят собственное разложение канала, чтобы получить второе множество векторов управления, которые используются для получения матрицы формирования импульсов, используемой для приведения принятых символов к требуемым условиям таким образом, что восстанавливаются ортогональные потоки символов. 12 н. и 28 з.п. ф-лы, 10 ил.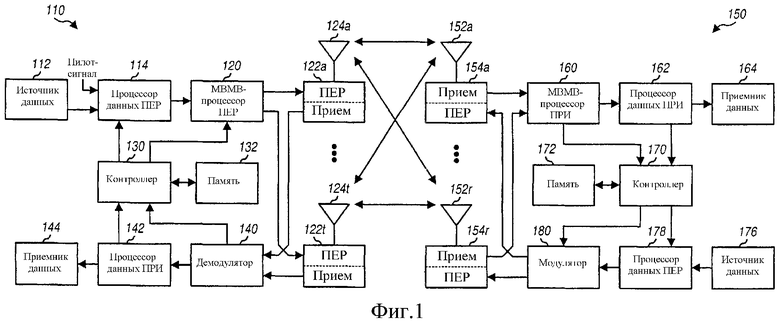
получения матрицы формирования импульсов на основании оцененного отклика канала со многими входами и многими выходами (МВМВ) и предварительного приведения к требуемым условиям множества потоков символов модуляции на основании матрицы формирования импульсов, чтобы обеспечить множество потоков предварительно приведенных к требуемым условиям символов для передачи по МВМВ-каналу.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УНИВЕРСАЛЬНЫЙ ЦИФРОВОЙ ФОРМИРОВАТЕЛЬ СИГНАЛОВ С НЕПРЕРЫВНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2000 |
|
RU2176436C1 |
| ЕР 0549019 А2, 30.06.1993 | |||
| Демпфирующая муфта | 1977 |
|
SU624018A1 |
| US 5960040 A, 28.09.1999. | |||

