Притязание на приоритет по 35 U.S.C. § 119.
Настоящая заявка на патент притязает на приоритет по предварительной заявке на патент США № 60/421462, озаглавленной “Channel Calibration for a Time Division Duplexed Communication System”, и предварительной заявке на патент США № 60/421309, озаглавленной “MIMO WLAN System”, обе поданы 25 октября 2002 года, и права на которые принадлежат правообладателю настоящей заявки на патент, и которые включены в настоящее описание во всей своей полноте в качестве ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится в общем случае к связи и более точно к способам калибровки откликов нисходящего и восходящего каналов в коммуникационной системе с дуплексной связью и временным разделением каналов (TDD).
УРОВЕНЬ ТЕХНИКИ
В беспроводной коммуникационной системе передача данных между точкой доступа и пользовательским терминалом происходит по беспроводному каналу. В зависимости от конструкции системы одни и те же или различные полосы частот могут использоваться для нисходящей линии и восходящей линии. Нисходящая линия (или прямая линия) относится к передаче от точки доступа к пользовательскому терминалу, а восходящая линия (или обратная линия) относится к передаче от пользовательского терминала к точке доступа. Если доступны две полосы частот, тогда нисходящая линия и восходящая линия могут передаваться в отдельных полосах частот, используя дуплексную связь с частотным разделением каналов (FDD). Если доступна только одна полоса частот, тогда нисходящая линия и восходящая линия могут совместно использовать одну полосу частот с применением дуплексной связи с временным разделением каналов (TDD).
Для достижения высокой производительности часто бывает необходимым знать частотный отклик беспроводного канала. Например, отклик нисходящего канала может быть необходим точке доступа для выполнения пространственной обработки (описано ниже) для передачи данных по нисходящей линии пользовательскому терминалу. Отклик нисходящего канала может быть оценен пользовательским терминалом, основываясь на пилот-сигнале, передаваемом точкой доступа. Пользовательский терминал может затем отправить оценку канала обратно в точку доступа для дальнейшего использования. Для такой схемы оценки канала необходимо передавать пилот-сигнал по нисходящей линии и отправка оценки канала в точку доступа вызывает дополнительные задержки и требует дополнительных ресурсов.
Для TDD систем с общей полосой частот можно предположить, что отклики нисходящего канала и восходящего канала являются взаимно-обратными. То есть, если  представляет матрицу отклика канала от антенной решетки A до антенной решетки B, то взаимно-обратный канал подразумевает, что соединение от решетки B к решетке A дается
представляет матрицу отклика канала от антенной решетки A до антенной решетки B, то взаимно-обратный канал подразумевает, что соединение от решетки B к решетке A дается  , где обозначает транспонированную матрицу . Таким образом, для TDD системы отклик канала для одной линии может быть оценен, основываясь на пилот-сигнале, посланном по другой линии. Например, отклик восходящего канала может быть оценен, основываясь на пилот-сигнале восходящей линии, и транспонированный отклик восходящего канала может быть использован в качестве оценки отклика нисходящего канала.
, где обозначает транспонированную матрицу . Таким образом, для TDD системы отклик канала для одной линии может быть оценен, основываясь на пилот-сигнале, посланном по другой линии. Например, отклик восходящего канала может быть оценен, основываясь на пилот-сигнале восходящей линии, и транспонированный отклик восходящего канала может быть использован в качестве оценки отклика нисходящего канала.
Однако частотные отклики передающей и приемной цепей в точке доступа обычно отличаются от частотных откликов передающей и приемной цепей в пользовательском терминале. В частности, частотные отклики передающей/приемной цепей, используемые для передачи по восходящей линии, могут отличаться от частотных откликов передающих/приемных цепей, используемых для передачи по нисходящей линии. “Эффективный” отклик нисходящего канала (т.е. включающего в себя передающие/приемные цепи) может быть отличным от отклика, взаимно-обратного эффективного нисходящего канала вследствие различий в передающих/приемных цепях (т.е. отклики эффективных каналов не являются взаимно-обратными). Если взаимно-обратная оценка отклика канала, полученная для одной линии, используется для пространственной обработки в другой линии, тогда различие в частотных откликах передающих/приемных цепей представляет ошибку, которая в случае, если ее не определить и не учесть, может вызвать деградацию производительности.
Таким образом, в данной области техники существует потребность в способах калибровки нисходящего и восходящего каналов в TDD коммуникационной системе.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В настоящем описании изложены способы для калибровки нисходящего и восходящего каналов для учета различий в частотных откликах передающей и приемной цепей в точке доступа и пользовательском терминале. После калибровки оценка отклика канала, полученная для одной линии, может быть использована для получения оценки отклика канала для другой линии. Это упрощает оценку канала и пространственную обработку.
В одном из вариантов осуществления предложен способ калибровки нисходящего и восходящего каналов в беспроводной TDD коммуникационной системе с множеством входов и множеством выходов (MIMO). Согласно способу пилот-сигнал передают по восходящему каналу и используют для вывода оценки отклика восходящего канала. Пилот-сигнал также передают по нисходящему каналу и используют для вывода оценки отклика нисходящего канала. Затем определяют два набора поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов. Калиброванный нисходящий канал формируют путем использования первого набора поправочных факторов для нисходящего канала, и калиброванный восходящий канал формируют путем использования второго набора поправочных факторов для восходящего канала. Соответствующие поправочные факторы используют в соответствующих передатчиках для нисходящего и восходящего каналов. Отклики калиброванных нисходящего и восходящего каналов являются приблизительно взаимно-обратными благодаря двум наборам поправочных факторов. Первый и второй наборы поправочных факторов могут быть определены с использованием вычисления отношения матриц или вычисления с минимальной среднеквадратичной ошибкой (MMSE), как описано ниже.
Калибровка может выполняться в реальном масштабе времени, основываясь на передаче по радиоканалу. Каждый пользовательский терминал в системе может вывести второй набор поправочных факторов для использования в нем. Первый набор поправочных факторов для точки доступа может быть выведен множеством терминалов. Для системы с мультиплексированием с ортогональным делением частот (OFDM) калибровка может выполняться для первого набора поддиапазонов для получения двух наборов поправочных факторов для каждого поддиапазона в наборе. Поправочные факторы для других “некалиброванных” поддиапазонов могут быть интерполированы, основываясь на поправочных факторах, полученных для “калиброванных” поддиапазонов.
Различные аспекты вариантов осуществления настоящего изобретения более подробно описаны ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Отличительные особенности, сущность и преимущество настоящего изобретения станут более очевидными из приведенного ниже подробного описания, рассматриваемого совместно с чертежами, на которых одинаковые ссылочные позиции обозначают одинаковые элементы.
На фиг.1 показаны передающие и приемные цепи в точке доступа и пользовательском терминале MIMO системы;
фиг.2 иллюстрирует применение поправочных факторов для учета различий в передающих/приемных цепях точки доступа и пользовательского терминала;
на фиг.3 показан процесс калибровки откликов нисходящего и восходящего каналов в TDD MIMO-OFDM системе;
на фиг.4 показан процесс вывода оценок поправочных векторов из оценок откликов нисходящего и восходящего каналов;
фиг.5 представляет собой блок-схему точки доступа и пользовательского терминала; и
фиг. 6 представляет собой блок-схему TX пространственного процессора.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Способы калибровки, изложенные в настоящем описании, могут быть использованы для различных коммуникационных систем. В частности, эти способы могут быть использованы в системах с одним входом и одним выходом (SISO), системах с множеством входов и одним выходом (MISO), системах с одним входом и множеством выходов (SIMO) и системах с множеством входов и множеством выходов (MIMO).
MIMO система использует множество (NT) передающих антенн и множество (NR) приемных антенн для передачи данных. MIMO канал, сформированный NT передающими и NR приемными антеннами, может быть разделен на NS независимых каналов, причем NS≤min{NT,NR}. Каждый из NS независимых каналов также называется пространственным каналом или собственной модой MIMO канала и соответствует размерности. MIMO система может обеспечить улучшенную производительность (т.е. увеличенную емкость передачи) в случае, если используются дополнительные размерности, созданные множеством передающих и приемных антенн. Обычно это требует точной оценки отклика канала между передатчиком и приемником.
На Фиг. 1 показана блок-схема передающей и приемной цепей в точке 102 доступа и пользовательском терминале 104 в MIMO системе. Для этой системы восходящая линия и нисходящая линия совместно используют один и тот же частотный диапазон способом дуплексной связи с временным разделением.
Для нисходящей линии в точке 102 доступа символы (определяемые вектором  “передачи”) обрабатываются передающей цепью (TMTR) 114 и передаются через Nap антенны 116 по беспроводному каналу. В пользовательском терминале 104 сигналы нисходящей линии принимаются Nut антеннами 152 и обрабатываются приемной цепью (RCVR) 154 для обеспечения принятых символов (обозначаемых вектором
“передачи”) обрабатываются передающей цепью (TMTR) 114 и передаются через Nap антенны 116 по беспроводному каналу. В пользовательском терминале 104 сигналы нисходящей линии принимаются Nut антеннами 152 и обрабатываются приемной цепью (RCVR) 154 для обеспечения принятых символов (обозначаемых вектором  “приема”). Обработка в передающей цепи 114, как правило, включает в себя цифроаналоговое преобразование, усиление, фильтрацию, повышение частоты и т.д. Обработка в приемной цепи 154, как правило, включает в себя понижение частоты, усиление, фильтрацию, аналого-цифровое преобразование и т.д.
“приема”). Обработка в передающей цепи 114, как правило, включает в себя цифроаналоговое преобразование, усиление, фильтрацию, повышение частоты и т.д. Обработка в приемной цепи 154, как правило, включает в себя понижение частоты, усиление, фильтрацию, аналого-цифровое преобразование и т.д.
В случае восходящей линии в пользовательском терминале 104 символы (обозначаемые вектором  передачи) обрабатываются в передающей цепи 164 и передаются через Nut антенны 152 по беспроводному каналу. В точке 102 доступа сигналы восходящей линии принимаются Nap антеннами 116 и обрабатываются в приемной цепи 124 для обеспечения принятых символов (обозначаемых вектором
передачи) обрабатываются в передающей цепи 164 и передаются через Nut антенны 152 по беспроводному каналу. В точке 102 доступа сигналы восходящей линии принимаются Nap антеннами 116 и обрабатываются в приемной цепи 124 для обеспечения принятых символов (обозначаемых вектором  приема).
приема).
В случае нисходящей линии вектор приема в пользовательском терминале может быть выражен как
 ,
,
где  представляет собой вектор передачи с Nap элементами для символов, передаваемых через Nap антенны точки доступа;
представляет собой вектор передачи с Nap элементами для символов, передаваемых через Nap антенны точки доступа;
 представляет собой вектор приема с Nut элементами для символов, принятых Nut антеннами в пользовательском терминале;
представляет собой вектор приема с Nut элементами для символов, принятых Nut антеннами в пользовательском терминале;
 представляет собой Nap×Nap диагональную матрицу с элементами, представляющими собой комплексные усиления, связанные с передающей цепью для Nap антенн в точке доступа;
представляет собой Nap×Nap диагональную матрицу с элементами, представляющими собой комплексные усиления, связанные с передающей цепью для Nap антенн в точке доступа;
 представляет собой Nut×Nut диагональную матрицу с элементами, представляющими собой комплексные усиления, связанные с приемной цепью для Nut антенн в пользовательском терминале;
представляет собой Nut×Nut диагональную матрицу с элементами, представляющими собой комплексные усиления, связанные с приемной цепью для Nut антенн в пользовательском терминале;
представляет собой Nut×Nap матрицу откликов каналов для нисходящей линии.
Отклики передающих/приемных цепей и беспроводного канала, как правило, являются функцией частоты. Для простоты предполагается, что канал является каналом с амплитудным замиранием (т.е. с равномерным частотным откликом).
В случае восходящей линии вектор приема в точке доступа может быть выражен как

где  представляет собой вектор передачи для символов, передаваемых через Nut антенны пользовательского терминала;
представляет собой вектор передачи для символов, передаваемых через Nut антенны пользовательского терминала;
 представляет собой вектор приема для символов, принятых Nap антеннами в точке доступа;
представляет собой вектор приема для символов, принятых Nap антеннами в точке доступа;
 представляет собой Nut×Nut диагональную матрицу с элементами в виде комплексных усилений, связанных с передающей цепью для Nut антенн в пользовательском терминале;
представляет собой Nut×Nut диагональную матрицу с элементами в виде комплексных усилений, связанных с передающей цепью для Nut антенн в пользовательском терминале;
 представляет собой Nap×Nap диагональную матрицу с элементами в виде комплексных усилений, связанных с приемной цепью для Nap антенн в точке доступа; и
представляет собой Nap×Nap диагональную матрицу с элементами в виде комплексных усилений, связанных с приемной цепью для Nap антенн в точке доступа; и
представляет собой Nap×Nut матрицу откликов каналов для восходящей линии.
Для TDD системы, поскольку нисходящая линия и восходящая линия совместно используют один и тот же диапазон частот, обычно существует сильная корреляция между откликами нисходящего и восходящего каналов. Таким образом, матрицы откликов нисходящего и восходящего каналов могут рассматриваться как взаимно-обратные (т.е. транспонированные) по отношению друг к другу, и обозначаемые как , , соответственно, как показано в уравнениях (1) и (2). Однако отклики передающих/приемных цепей в точке доступа, как правило, не совпадают с откликами передающих/приемных цепей в пользовательском терминале. Указанные различия приводят к неравенству  .
.
Из уравнения (1) и (2) “эффективные” отклики нисходящего и восходящего каналов,  и
и  , которые включают в себя отклики, используемых передающих и приемных цепей, могут быть выражены как
, которые включают в себя отклики, используемых передающих и приемных цепей, могут быть выражены как
 и
и 
Комбинируя указанные два уравнения и уравнение (3), может быть получено следующее соотношение:

Преобразуя уравнение (4), получаем следующее:

или

где  и
и  .
.
Уравнение (5) также может быть представлено в виде:
 .
.
Левая сторона уравнения (6) представляет отклик калиброванного канала восходящей линии, а правая сторона представляет транспонированный отклик калиброванного канала нисходящей линии. Использование диагональных матриц,  и
и  , в эффективных откликах нисходящего и восходящего каналов, как показано в уравнении (6), позволяет выразить отклики калиброванных каналов для нисходящей линии и восходящей линии как результат транспонирования друг друга. (Nap×Nap) диагональная матрица
, в эффективных откликах нисходящего и восходящего каналов, как показано в уравнении (6), позволяет выразить отклики калиброванных каналов для нисходящей линии и восходящей линии как результат транспонирования друг друга. (Nap×Nap) диагональная матрица  для точки доступа представляет собой отношение отклика
для точки доступа представляет собой отношение отклика  приемной цепи к отклику
приемной цепи к отклику  передающей цепи (т.е.
передающей цепи (т.е.  ), причем отношение является поэлементным отношением. Аналогично (Nut×Nut) диагональная матрица
), причем отношение является поэлементным отношением. Аналогично (Nut×Nut) диагональная матрица  для пользовательского терминала представляет собой отношение отклика
для пользовательского терминала представляет собой отношение отклика  приемной цепи и отклика
приемной цепи и отклика  передающей цепи.
передающей цепи.
Матрицы  и
и  включают в себя значение, учитывающие различия в передающих/приемных цепях точки доступа и пользовательского терминала. Это позволяет отклик канала для одной линии выразить через отклик канала для другой линии, как показано в уравнении (6).
включают в себя значение, учитывающие различия в передающих/приемных цепях точки доступа и пользовательского терминала. Это позволяет отклик канала для одной линии выразить через отклик канала для другой линии, как показано в уравнении (6).
Для определения матриц  и
и  может быть выполнена калибровка. Как правило, истинный отклик канала и отклики передающей/приемной цепи не являются известными, а также не могут быть легко и точно получены. Напротив, эффективные отклики нисходящего и восходящего каналов,
может быть выполнена калибровка. Как правило, истинный отклик канала и отклики передающей/приемной цепи не являются известными, а также не могут быть легко и точно получены. Напротив, эффективные отклики нисходящего и восходящего каналов,  и
и  , могут быть оценены, основываясь на пилот-сигналах, передаваемых по нисходящей линии и восходящей линии, соответственно, как описано ниже. Затем оценки матриц
, могут быть оценены, основываясь на пилот-сигналах, передаваемых по нисходящей линии и восходящей линии, соответственно, как описано ниже. Затем оценки матриц  и
и  , которые называются поправочными матрицами
, которые называются поправочными матрицами  и
и  , могут быть выведены, основываясь на оценках откликов нисходящего и восходящего каналов,
, могут быть выведены, основываясь на оценках откликов нисходящего и восходящего каналов,  и
и  , как описано ниже. Матрицы
, как описано ниже. Матрицы  и
и  включают в себя поправочные факторы, которые позволяют учитывать различия в передающих/приемных цепях точки доступа и пользовательского терминала.
включают в себя поправочные факторы, которые позволяют учитывать различия в передающих/приемных цепях точки доступа и пользовательского терминала.
Фиг. 2 иллюстрирует использование поправочных матриц  и
и  для учета различий в передающих/приемных цепях точки доступа и пользовательского терминала. В случае нисходящей линии вектор
для учета различий в передающих/приемных цепях точки доступа и пользовательского терминала. В случае нисходящей линии вектор  передачи сначала умножают на матрицу
передачи сначала умножают на матрицу  в блоке 112. Последующая обработка в передающей цепи 114 и приемной цепи 154 для нисходящей линии является такой же, как показано на Фиг. 1. Аналогично, в случае восходящей линии вектор
в блоке 112. Последующая обработка в передающей цепи 114 и приемной цепи 154 для нисходящей линии является такой же, как показано на Фиг. 1. Аналогично, в случае восходящей линии вектор  передачи сначала умножают на матрицу
передачи сначала умножают на матрицу  в блоке 162. Опять же последующая обработка в передающей цепи 164 и приемной цепи 124 для восходящей линии является такой же, как показано на Фиг. 1.
в блоке 162. Опять же последующая обработка в передающей цепи 164 и приемной цепи 124 для восходящей линии является такой же, как показано на Фиг. 1.
“Калиброванные” отклики нисходящего и восходящего каналов, видимые в пользовательском терминале и точке доступа, соответственно, при этом могут быть выражены как
 и
и 
где  и
и  представляют собой выражения для оценки “истинных” откликов калиброванных каналов в уравнении (6). Комбинируя два уравнения набора уравнений (7) с использованием выражения из уравнения (6), можно показать, что
представляют собой выражения для оценки “истинных” откликов калиброванных каналов в уравнении (6). Комбинируя два уравнения набора уравнений (7) с использованием выражения из уравнения (6), можно показать, что  . Точность отношения
. Точность отношения  зависит от точности матриц
зависит от точности матриц  и
и  , которая в свою очередь, как правило, зависит от качества оценок откликов нисходящего и восходящего каналов,
, которая в свою очередь, как правило, зависит от качества оценок откликов нисходящего и восходящего каналов,  и
и  .
.
Как показано выше, калибровка может выполняться в TDD системе для определения различий в откликах передающих/приемных цепей в точке доступа и пользовательском терминале, и для учета этих различий. После калибровки передающих/приемных цепей оценка отклика калиброванного канала, полученная для одной линии (например,  ), может быть использована для определения оценки отклика калиброванного канала для другой линии (например,
), может быть использована для определения оценки отклика калиброванного канала для другой линии (например,  ).
).
Способы калибровки, изложенные в настоящем описании, также могут быть использованы для беспроводных коммуникационных систем, которые используют OFDM. При OFDM весь диапазон частот системы эффективно разделяют на несколько (NF) ортогональных поддиапазонов, которые также называются частотными бинами или подканалами. В случае OFDM каждый поддиапазон связан с соответствующей поднесущей, которая может быть модулирована данными. Для MIMO системы, которая использует OFDM (т.е. MIMO-OFDM системы), каждый поддиапазон каждой собственной моды можно рассматривать как независимый канал передачи.
Калибровка может выполняться различными способами. Для ясности конкретная схема калибровки описана ниже для TDD MIMO-OFDM системы. Для такой системы каждый поддиапазон беспроводной линии может рассматриваться как взаимно-обратный.
На фиг. 3 показана блок-схема последовательности операций процесса 300 калибровки откликов нисходящего и восходящего каналов в TDD MIMO-OFDM системе. Сначала пользовательский терминал получает тайминг и частоту точки доступа, используя процедуры получения, определенные для данной системы (этап 310). Затем пользовательский терминал может отправить сообщение для инициирования калибровки точкой доступа, или калибровка может быть инициирована точкой доступа. Калибровка может выполняться параллельно с регистрацией/аутентификацией пользовательского терминала точкой доступа (например, во время установки вызова) и также может выполняться по необходимости в любое время.
Калибровка может выполняться для всех поддиапазонов, которые могут быть использованы для передачи данных (которые называются поддиапазонами “данных”). Поддиапазоны, не используемые для передачи данных (т.е. охранные поддиапазоны), как правило, не требуют калибровки. Однако поскольку частотные отклики передающих/приемных цепей в точке доступа и пользовательском терминале обычно являются равномерными по большинству полос частот, представляющих интерес, и поскольку смежные поддиапазоны с большой вероятностью являются коррелированными, калибровка может выполняться только для подмножества поддиапазонов данных. Если калибруются не все поддиапазоны данных, то информация о поддиапазонах, предназначенных для калибровки (которые называются как “назначенные” поддиапазоны), может быть отправлена в точку доступа (например, в сообщении, отправленном для инициации калибровки).
Для калибровки пользовательский терминал передает MIMO пилот-сигнал по назначенным поддиапазонам в точку доступа (этап 312). Генерация MIMO пилот-сигнала описана более подробно ниже. Продолжительность передачи MIMO пилот-сигнала по восходящей линии может зависеть от количества назначенных поддиапазонов. Например, может быть достаточно 8 OFDM символов, если калибровка выполняется для четырех поддиапазонов, а для большего количества поддиапазонов может потребоваться большее количество (например, 20) OFDM символов. Как правило, полная мощность передачи является фиксированной, поэтому если MIMO пилот-сигнал передают по небольшому количеству поддиапазонов, то для каждого из этих поддиапазонов может использоваться более высокий уровень мощности передачи и ОСШ для каждого поддиапазона будет высоким. Напротив, если MIMO пилот-сигнал передают по большому количеству поддиапазонов, тогда для каждого поддиапазона будет использован меньший уровень мощности передачи, и ОСШ для каждого поддиапазона будет хуже. Если ОСШ для каждого поддиапазона не является достаточно высоким, тогда для MIMO пилот-сигнала может быть отправлено большее количество OFDM символов, которые интегрируются в приемнике для получения более высоко общего ОСШ для данного поддиапазона.
Точка доступа принимает MIMO пилот-сигнал по восходящей линии и выводит оценку отклика восходящего канала,  , для каждого из назначенных поддиапазонов, где k представляет собой индекс поддиапазона. Оценка канала, основанная на MIMO пилот-сигнале, описана ниже. Оценки откликов восходящих каналов оцифровывают и посылают в пользовательский терминал (этап 314). Элементы каждой матрицы
, для каждого из назначенных поддиапазонов, где k представляет собой индекс поддиапазона. Оценка канала, основанная на MIMO пилот-сигнале, описана ниже. Оценки откликов восходящих каналов оцифровывают и посылают в пользовательский терминал (этап 314). Элементы каждой матрицы  представляют собой комплексные усиления каналов между Nut передающими и Nap приемными антеннами для восходящей линии для k-го поддиапазона. Усиление каналов для всех матриц могут быть масштабированы на конкретный фактор масштабирования, который является общим для всех назначенных поддиапазонов, для получения требуемого динамического диапазона. Например, усиления каналов в каждой матрице
представляют собой комплексные усиления каналов между Nut передающими и Nap приемными антеннами для восходящей линии для k-го поддиапазона. Усиление каналов для всех матриц могут быть масштабированы на конкретный фактор масштабирования, который является общим для всех назначенных поддиапазонов, для получения требуемого динамического диапазона. Например, усиления каналов в каждой матрице  могут быть единообразно масштабированы на наибольшее усиление канала для всех матриц
могут быть единообразно масштабированы на наибольшее усиление канала для всех матриц  для назначенных поддиапазонов таким образом, чтобы величина наибольшего усиления канала составляла единицу. Поскольку задачей калибровки является нормализация различий в усилении/фазе между нисходящей линией и восходящей линией, абсолютные усиления каналов не являются важными. Если 12-битные комплексные значения (т.е. с 12-битными синфазными (I) и 12-битными квадратурными (Q) компонентами) используют для представления усилений канала, тогда оценки откликов нисходящих каналов могут быть отправлены в пользовательский терминал в 3·Nut·Nap·Nsb в байтах, где “3” возникает вследствие того, что для представления I и Q компонентов используют 24 бита и Nsb представляет собой количество назначенных поддиапазонов.
для назначенных поддиапазонов таким образом, чтобы величина наибольшего усиления канала составляла единицу. Поскольку задачей калибровки является нормализация различий в усилении/фазе между нисходящей линией и восходящей линией, абсолютные усиления каналов не являются важными. Если 12-битные комплексные значения (т.е. с 12-битными синфазными (I) и 12-битными квадратурными (Q) компонентами) используют для представления усилений канала, тогда оценки откликов нисходящих каналов могут быть отправлены в пользовательский терминал в 3·Nut·Nap·Nsb в байтах, где “3” возникает вследствие того, что для представления I и Q компонентов используют 24 бита и Nsb представляет собой количество назначенных поддиапазонов.
Пользовательский терминал также принимает MIMO пилот-сигнал по нисходящей линии, передаваемый точкой доступа (этап 316) и выводит оценку отклика нисходящего канала,  , для каждого из назначенных поддиапазонов, основываясь на принятом пилот-сигнале (этап 318). Затем пользовательский терминал определяет поправочные факторы,
, для каждого из назначенных поддиапазонов, основываясь на принятом пилот-сигнале (этап 318). Затем пользовательский терминал определяет поправочные факторы,  и
и  , для каждого из назначенных поддиапазонов, основываясь на оценках откликов восходящего и нисходящего каналов,
, для каждого из назначенных поддиапазонов, основываясь на оценках откликов восходящего и нисходящего каналов,  и
и  (этап 320).
(этап 320).
Для вывода поправочных факторов предполагается, что отклики нисходящего и восходящего каналов для каждого поддиапазона являются взаимно-обратными, с поправками для усиления/фазы для учета различий в передающих/приемных цепях точки доступа и пользовательского терминала, которые даются как
 , для k∈K,
, для k∈K,
где К представляет собой множество всех поддиапазонов данных. Поскольку во время калибровки доступны только оценки откликов эффективных нисходящих и восходящих каналов для назначенных поддиапазонов, уравнение (8) может быть переписано как
 , для k∈K',
, для k∈K',
где K' представляет собой множество всех назначенных поддиапазонов. Поправочный вектор  может быть определен как включающий в себя только Nut диагональных элементов
может быть определен как включающий в себя только Nut диагональных элементов  . Аналогично поправочный вектор
. Аналогично поправочный вектор  может быть определен как включающий в себя только Nap диагональных элементов
может быть определен как включающий в себя только Nap диагональных элементов  .
.
Поправочные факторы  и
и  могут быть выведены из оценок каналов
могут быть выведены из оценок каналов  и
и  различными способами, в том числе при помощи вычисления отношения матриц и вычисления с минимальной среднеквадратичной ошибкой (MMSE). Оба указанных способа вычисления более подробно описаны ниже. Также могут использоваться другие способы вычисления, и это находится в пределах объема настоящего изобретения.
различными способами, в том числе при помощи вычисления отношения матриц и вычисления с минимальной среднеквадратичной ошибкой (MMSE). Оба указанных способа вычисления более подробно описаны ниже. Также могут использоваться другие способы вычисления, и это находится в пределах объема настоящего изобретения.
А. Вычисление отношения матриц
Фиг. 4 представляет собой блок-схему последовательности операций варианта осуществления процесса 320а для вывода поправочных векторов  и
и  из оценок откликов нисходящего и восходящего каналов
из оценок откликов нисходящего и восходящего каналов  и
и  , используя вычисление отношения матриц. Процесс 320а может быть использован в качестве этапа 320 по Фиг. 3.
, используя вычисление отношения матриц. Процесс 320а может быть использован в качестве этапа 320 по Фиг. 3.
Сначала для каждого назначенного поддиапазона вычисляют (Nut×Nap) матрицу  (этап 412), следующим образом:
(этап 412), следующим образом:
 , для k∈K'
, для k∈K'
где отношение вычисляют поэлементно. Каждый элемент  таким образом может быть вычислен как
таким образом может быть вычислен как
 , для i={1…Nut} и j={1…Nap}
, для i={1…Nut} и j={1…Nap}
где  и
и  представляют собой ((i,j)-й (строка, столбец) элемент
представляют собой ((i,j)-й (строка, столбец) элемент  и
и  , соответственно,
, соответственно,  представляет собой (i,j)-й элемент .
представляет собой (i,j)-й элемент .
В одном из вариантов осуществления поправочный вектор для точки доступа,  , определяют как равный среднему нормированных строк и выводят на этапах блока 420. Каждая строка сначала нормируется посредством масштабирования каждого из Nap элементов в строке на первый элемент в этой строке (этап 422). Таким образом, если
, определяют как равный среднему нормированных строк и выводят на этапах блока 420. Каждая строка сначала нормируется посредством масштабирования каждого из Nap элементов в строке на первый элемент в этой строке (этап 422). Таким образом, если  представляет собой
представляет собой i-ю строку , то нормированная строка
i-ю строку , то нормированная строка  может быть выражена как
может быть выражена как
 , уравнение (12)
, уравнение (12)
Затем среднее значение нормированных строк определяют как сумма Nut нормированных строк, деленная на Nut (этап 424). Поправочный вектор  определяют как равный указанному среднему (этап 426), что может быть выражено как
определяют как равный указанному среднему (этап 426), что может быть выражено как
 , для k∈K',
, для k∈K',
Вследствие нормировки первый элемент  является единичным.
является единичным.
В одном из вариантов осуществления поправочный вектор для пользовательского терминала,  , определен как равный среднему обратных значений нормированных столбцов , и определяется на этапах блока 430. Сначала j-й столбец нормируют путем масштабирования каждого элемента в столбце на j-й элемент вектора
, определен как равный среднему обратных значений нормированных столбцов , и определяется на этапах блока 430. Сначала j-й столбец нормируют путем масштабирования каждого элемента в столбце на j-й элемент вектора  , который обозначен как
, который обозначен как  (этап 432). Таким образом, если
(этап 432). Таким образом, если  представляет собой j-й столбец , то нормированный столбец
представляет собой j-й столбец , то нормированный столбец  может быть выражен как
может быть выражен как

Затем среднее обратных значений нормированных столбцов определяют как сумму обратных значений Nap нормированных столбцов, деленную на Nap (этап 434). Поправочный вектор  определяют как равный указанному среднему (этап 436), что может быть выражено как
определяют как равный указанному среднему (этап 436), что может быть выражено как
 , для k∈K,
, для k∈K,
где обратные значения нормированных столбцов,  , получают на поэлементной основе.
, получают на поэлементной основе.
В. MMSE вычисление
Для MMSE вычисления поправочные факторы  и
и  выводят из оценок откликов нисходящего и восходящего каналов
выводят из оценок откликов нисходящего и восходящего каналов  и
и  таким образом, что среднеквадратичная ошибка (MSE) между откликом калиброванного нисходящего канала и откликом калиброванного восходящего канала является минимальной. Это условие может быть выражено как
таким образом, что среднеквадратичная ошибка (MSE) между откликом калиброванного нисходящего канала и откликом калиброванного восходящего канала является минимальной. Это условие может быть выражено как
 , для k∈K,
, для k∈K,
что также может быть записано как
 , для k∈K,
, для k∈K,
где  , поскольку
, поскольку  является диагональной матрицей.
является диагональной матрицей.
На уравнение (16) наложено ограничение, заключающееся в том, что первый элемент  определен как равный единице (т.е.
определен как равный единице (т.е.  ). Без такого ограничения будет получено тривиальное решение, в котором все элементы матриц
). Без такого ограничения будет получено тривиальное решение, в котором все элементы матриц  и
и  равны нулю. В уравнении (16) матрицу
равны нулю. В уравнении (16) матрицу  сначала получают как
сначала получают как  . Затем получают квадрат абсолютного значения для каждого из Nap·Nut элементов матрицы . Среднеквадратичная ошибка (или квадратичная ошибка, если не производится деление на Nap·Nut) при этом равна сумме всех квадратов Nap·Nut значений.
. Затем получают квадрат абсолютного значения для каждого из Nap·Nut элементов матрицы . Среднеквадратичная ошибка (или квадратичная ошибка, если не производится деление на Nap·Nut) при этом равна сумме всех квадратов Nap·Nut значений.
MMSE вычисление выполняют для каждого назначенного поддиапазона для получения поправочных факторов  и
и  для этого поддиапазона. MMSE вычисление для одного поддиапазона описано ниже. Для простоты индекс поддиапазона, k, в нижеследующем описании опущен. Также для простоты элементы оценки
для этого поддиапазона. MMSE вычисление для одного поддиапазона описано ниже. Для простоты индекс поддиапазона, k, в нижеследующем описании опущен. Также для простоты элементы оценки  отклика нисходящего канала обозначены
отклика нисходящего канала обозначены  , элементы оценки
, элементы оценки  отклика восходящего канала обозначены как
отклика восходящего канала обозначены как  , диагональные элементы матрицы
, диагональные элементы матрицы  обозначены как
обозначены как  и диагональные элементы матрицы
и диагональные элементы матрицы  обозначены как
обозначены как  , где i={1…Nap} и j={1…Nut}.
, где i={1…Nap} и j={1…Nut}.
Среднеквадратичная ошибка может быть переписана, исходя из уравнения (16), следующим образом:
 ,
,
и опять же с учетом ограничения  . Минимальная среднеквадратичная ошибка может быть получена путем вычисления частных производных уравнения (17) по
. Минимальная среднеквадратичная ошибка может быть получена путем вычисления частных производных уравнения (17) по  и ν и приравнивания частных производных нулю. Результатом этих операций являются следующие наборы уравнений:
и ν и приравнивания частных производных нулю. Результатом этих операций являются следующие наборы уравнений:
 , для i∈{2…Nap}, и
, для i∈{2…Nap}, и , для j∈{1…Nut}
, для j∈{1…Nut}
В уравнении (18а)  , поэтому для этого случая частная производная отсутствует, и индекс i меняется от 2 до Nap.
, поэтому для этого случая частная производная отсутствует, и индекс i меняется от 2 до Nap.
Набор из (Nap+Nut-1) уравнений в наборах уравнений (18a) и (18b) может быть с большим удобством выражен в матричном виде следующим образом:

где

 и
и  .
.
Матрица  включает в себя (Nap+Nut-1) строк, причем первые Nap-1 строк соответствуют Nap-1 уравнений из набора уравнений (18а), и последние Nut строк соответствуют Nut уравнений из набора уравнений (18b). В частности, первая строка матрицы образована из набора уравнений (18а) при i=2, вторая строка образована при i=3 и т.д. Nap-я строка матрицы образована из набора уравнений (18b) при j=1 и т.д. И последняя строка образована при j=Nut. Как показано выше, элементы матрицы и элементы вектора
включает в себя (Nap+Nut-1) строк, причем первые Nap-1 строк соответствуют Nap-1 уравнений из набора уравнений (18а), и последние Nut строк соответствуют Nut уравнений из набора уравнений (18b). В частности, первая строка матрицы образована из набора уравнений (18а) при i=2, вторая строка образована при i=3 и т.д. Nap-я строка матрицы образована из набора уравнений (18b) при j=1 и т.д. И последняя строка образована при j=Nut. Как показано выше, элементы матрицы и элементы вектора  могут быть получены, основываясь на элементах матриц
могут быть получены, основываясь на элементах матриц  и
и  .
.
Поправочные факторы включены в вектор  , который может быть получен как
, который может быть получен как

Результат MMSE вычисления представляет собой поправочные матрицы  и
и  , которые минимизируют среднеквадратичную ошибку откликов калиброванных нисходящего и восходящего каналов, как показано в уравнении (16). Поскольку матрицы
, которые минимизируют среднеквадратичную ошибку откликов калиброванных нисходящего и восходящего каналов, как показано в уравнении (16). Поскольку матрицы  и
и  получены, основываясь на оценках откликов нисходящего и восходящего каналов,
получены, основываясь на оценках откликов нисходящего и восходящего каналов,  и
и  , качества поправочных матриц
, качества поправочных матриц  и
и  таким образом зависит от качества оценок каналов
таким образом зависит от качества оценок каналов  и
и  . MIMO пилот-сигнал может быть усреднен в приемнике для получения более точных оценок для
. MIMO пилот-сигнал может быть усреднен в приемнике для получения более точных оценок для  и
и  .
.
Поправочные матрицы  и
и  , полученные основываясь на MMSE вычислении, являются в общем случае лучшими, чем поправочные матрицы, полученные, основываясь на вычислении отношения матриц, особенно когда некоторые из усилений каналов являются малыми, и измеренный шум может привести к сильной деградации усилений каналов.
, полученные основываясь на MMSE вычислении, являются в общем случае лучшими, чем поправочные матрицы, полученные, основываясь на вычислении отношения матриц, особенно когда некоторые из усилений каналов являются малыми, и измеренный шум может привести к сильной деградации усилений каналов.
С. Дополнительные вычисления
Вне зависимости от конкретного способа вычисления, выбранного для использования, после завершения вычисления поправочных матриц пользовательский терминал посылает в точку доступа поправочные вектора для точки доступа,  , для всех назначенных поддиапазонов. Если для каждого поправочного фактора в
, для всех назначенных поддиапазонов. Если для каждого поправочного фактора в  используются 12-битные комплексные значения, тогда поправочные вектора
используются 12-битные комплексные значения, тогда поправочные вектора  для всех назначенных поддиапазонов могут быть отправлены в точку доступа в 3·(Nap-1)Nsb байтах, где “3” возникает вследствие того, что для I и Q компонентов в сумме используется 24 бита и (Nap-1) является результатом того, что первый элемент в каждом векторе
для всех назначенных поддиапазонов могут быть отправлены в точку доступа в 3·(Nap-1)Nsb байтах, где “3” возникает вследствие того, что для I и Q компонентов в сумме используется 24 бита и (Nap-1) является результатом того, что первый элемент в каждом векторе  равен единице и, следовательно, его не требуется передавать. Если первому элементу присвоено значение 29-1=+511, то при этом доступен диапазон 12 дБ (поскольку максимальная положительная 12-битная величина со знаком представляет собой 1211-1=+2047), что дает возможность, пользуясь 12-битными значениями, регулировать несоответствия до 12 дБ в усилениях между нисходящей линией и восходящей линией. Если нисходящая линия и восходящая линия соответствуют друг другу в пределах 12 дБ, и первый элемент нормирован на величину 511, тогда другие элементы не должны превышать 511·4=2044 по абсолютной величине, и могут быть представлены при помощи 12 битов.
равен единице и, следовательно, его не требуется передавать. Если первому элементу присвоено значение 29-1=+511, то при этом доступен диапазон 12 дБ (поскольку максимальная положительная 12-битная величина со знаком представляет собой 1211-1=+2047), что дает возможность, пользуясь 12-битными значениями, регулировать несоответствия до 12 дБ в усилениях между нисходящей линией и восходящей линией. Если нисходящая линия и восходящая линия соответствуют друг другу в пределах 12 дБ, и первый элемент нормирован на величину 511, тогда другие элементы не должны превышать 511·4=2044 по абсолютной величине, и могут быть представлены при помощи 12 битов.
Пару поправочных векторов  и
и  получают для каждого назначенного поддиапазона. Если калибровку выполняют не для всех поддиапазонов данных, тогда поправочные факторы для “некалиброванных” поддиапазонов могут быть получены интерполяцией поправочных факторов, полученных для назначенных поддиапазонов. Интерполяция может быть выполнена в точке доступа для получения поправочных векторов
получают для каждого назначенного поддиапазона. Если калибровку выполняют не для всех поддиапазонов данных, тогда поправочные факторы для “некалиброванных” поддиапазонов могут быть получены интерполяцией поправочных факторов, полученных для назначенных поддиапазонов. Интерполяция может быть выполнена в точке доступа для получения поправочных векторов  , для k∈K. Аналогично, интерполяция может быть выполнена в пользовательском терминале для получения поправочных векторов
, для k∈K. Аналогично, интерполяция может быть выполнена в пользовательском терминале для получения поправочных векторов  для k∈K.
для k∈K.
Впоследствии точка доступа и пользовательский терминал используют их соответствующие поправочные вектора  и
и  или соответствующие поправочные матрицы
или соответствующие поправочные матрицы  и
и  , для k∈K, для масштабирования символов модуляции перед передачей по беспроводному каналу, как описано ниже. При этом эффективный нисходящий канал, видимый со стороны пользовательского терминала, представляет собой
, для k∈K, для масштабирования символов модуляции перед передачей по беспроводному каналу, как описано ниже. При этом эффективный нисходящий канал, видимый со стороны пользовательского терминала, представляет собой  .
.
Описанная выше схема калибровки, посредством которой получают вектор поправочных факторов как для точки доступа, так и для пользовательского терминала, дает возможность вывода “совместимых” поправочных векторов для точки доступа, когда калибровка выполняется различными пользовательскими терминалами. Если калибровка в точке доступа уже выполнена (например, одним или несколькими пользовательскими терминалами), то текущие поправочные вектора могут обновляться при помощи вновь выведенных поправочных векторов.
Например, если два пользовательских терминала одновременно выполняют процедуру калибровки, тогда результаты калибровки от этих пользовательских терминалов могут быть усреднены для улучшения производительности. Однако, как правило, калибровка выполняется для одного пользовательского терминала единовременно. Таким образом, второй пользовательский терминал видит нисходящую линию, для которой уже использован поправочный вектор для первого пользовательского терминала. В этом случае произведение второго поправочного вектора и старого поправочного вектора может быть использовано в качестве нового поправочного вектора или также может быть использовано “взвешенное усреднение” (описанное ниже). Как правило, точка доступа использует один поправочный вектор для всех пользовательских терминалов, а не различные поправочные вектора для различных пользовательских терминалов (хотя такой вариант также может быть реализован). Обновление от множества пользовательских терминалов или последовательные обновления от одного пользовательского терминала могут обрабатываться одним и тем же способом. обновленные вектора могут применяться непосредственно (при помощи операции умножения). В качестве альтернативы, в случае, если требуется некоторое усреднение для уменьшения шума измерения, может быть использовано взвешенное усреднение, как описано ниже.
Таким образом, если точка доступа использует поправочные вектора  для передачи MIMO пилот-сигнала, из которого пользовательский терминал определяет новые поправочные вектора
для передачи MIMO пилот-сигнала, из которого пользовательский терминал определяет новые поправочные вектора  , то обновленные поправочные вектора
, то обновленные поправочные вектора  представляют собой результат умножения текущего и нового поправочных векторов. Поправочные вектора
представляют собой результат умножения текущего и нового поправочных векторов. Поправочные вектора  и
и  могут быть выведены в одном или в разных пользовательских терминалах.
могут быть выведены в одном или в разных пользовательских терминалах.
В одном из вариантов осуществления обновленные поправочные вектора определяют как  , причем умножение выполняется поэлементно. В другом варианте осуществления обновленные поправочные вектора могут быть переопределены как
, причем умножение выполняется поэлементно. В другом варианте осуществления обновленные поправочные вектора могут быть переопределены как  , где α представляет собой фактор, используемый для обеспечения взвешенного усреднения (т.е. 0<α<1). Если обновление калибровки происходит редко, то тогда лучше работает α со значением, близким к единице. Если обновления калибровки являются частыми, но зашумленными, то предпочтительными являются меньшие значения α. Затем обновленные поправочные вектора
, где α представляет собой фактор, используемый для обеспечения взвешенного усреднения (т.е. 0<α<1). Если обновление калибровки происходит редко, то тогда лучше работает α со значением, близким к единице. Если обновления калибровки являются частыми, но зашумленными, то предпочтительными являются меньшие значения α. Затем обновленные поправочные вектора  могут быть использованы точкой доступа до их следующего обновления.
могут быть использованы точкой доступа до их следующего обновления.
Как указывалось выше, калибровка может выполняться не для всех поддиапазонов данных. Например, калибровка может выполняться для каждого n-го поддиапазона, где n может определяться из ожидаемого отклика передающих/приемных цепей (например, n может быть 2, 4, 8, 16 и т.д.). Калибровка также может выполняться для неравномерно распределенных поддиапазонов. Например, поскольку на границах диапазона частот характеристика фильтра может иметь больший спад, что может создавать большее несоответствие в передающих/приемных цепях, то на границах полосы частот может выполняться калибровка большего количества поддиапазонов. В общем случае может выполняться калибровка любого количества поддиапазонов, распределенных любым образом, и это находится в пределах объема настоящего изобретения.
В приведенном выше описании поправочные вектора  и
и  для k∈K' выводятся пользовательским терминалом, и вектора
для k∈K' выводятся пользовательским терминалом, и вектора  отправляются в точку доступа. Эта схема преимущественно распределяет обработку калибровки между пользовательскими терминалами в случае системы с множественным доступом. Однако поправочные вектора
отправляются в точку доступа. Эта схема преимущественно распределяет обработку калибровки между пользовательскими терминалами в случае системы с множественным доступом. Однако поправочные вектора  и
и  также могут быть выведены в точке доступа, которая затем отправляет вектора
также могут быть выведены в точке доступа, которая затем отправляет вектора  в пользовательский терминал, и это находится в пределах объема настоящего изобретения.
в пользовательский терминал, и это находится в пределах объема настоящего изобретения.
Схема калибровки, описанная выше, позволяет каждому пользовательскому терминалу калибровать свои передающие/приемные цепи в реальном масштабе времени при передаче по радиоканалу. Это позволяет пользовательским терминалам с различными частотными откликами обеспечивать высокую производительность без жестких требований на частотный отклик или выполнение калибровки при изготовлении. Точка доступа может быть калибрована множеством пользовательских терминалов для обеспечения улучшенной точности.
D. Усиление
Калибровка может выполняться, основываясь на нормированных усилениях для нисходящего и восходящего каналов, которые представляют собой усиления относительно уровня шума в приемнике. После выполнения калибровки нисходящей линии и восходящей линии использование нормированных усилений позволяет получать характеристики одной линии (в том числе усиления каналов и ОСШ для каждой собственной моды), основываясь на измерениях усилений для другой линии.
Точка доступа и пользовательский терминал могут вначале выполнить балансировку входных уровней своих приемников таким образом, что уровни шума в приемных цепях точки доступа и пользовательского терминала будут примерно одинаковыми. Балансировка может быть выполнена путем оценки уровня шума, то есть определения секции принятого TDD кадра (т.е. единицы передачи по нисходящей/восходящей линии), которая имеет минимальную среднюю мощность за конкретный промежуток времени (например, один или два периодов символов). В общем случае временной интервал непосредственно перед началом каждого TDD кадра является свободным от передач, поскольку любые данные восходящей линии должны быть приняты точкой доступа, и затем должно быть выполнено переключение прием/передача, занимающее некоторое время, перед началом передачи точки доступа по нисходящей линии. В зависимости от помеховой обстановки уровень шума может определяться, основываясь на нескольких TDD кадрах. Затем выполняют измерение откликов нисходящего и восходящего канала относительно этого уровня шума. Более точно, усиление канала для данного поддиапазона данной пары передающей/приемной антенн может быть получено, например, в виде отношения принятых пилотных символов к переданным пилотным символам для этого поддиапазона данной пары передающей/приемной антенн. При этом нормированное усиление представляет собой измеренное усиление, деленное на уровень шума.
Большое отличие нормированных усилений для точки доступа и нормированных усилений для пользовательского терминала может привести к тому, что поправочные факторы для пользовательского терминала могут сильно отличаться от единицы. Поправочные факторы для точки доступа являются близкими к единице, поскольку первый элемент матрицы  установлен в 1.
установлен в 1.
Если поправочные факторы для пользовательского терминала сильно отличаются от единицы, то пользовательский терминал может быть не способен использовать вычисленные поправочные факторы. Это может происходить вследствие того, что пользовательский терминал имеет ограничение на его максимальную мощность передачи и может быть не в состоянии увеличить мощность передачи для больших поправочных факторов. Помимо этого, уменьшение мощности передачи для малых поправочных факторов в общем случае не является желательным, поскольку это может снизить скорость передачи данных.
Таким образом, пользовательский терминал может вести передачу, используя масштабированную версию вычисленных поправочных факторов. Масштабированные факторы калибровки могут быть получены при помощи масштабирования вычисленных поправочных факторов на конкретный масштаб, который может быть установлен равным разнице в усилениях (в виде разности или отношения) между откликами нисходящего и восходящего каналов. Такая разница в усилениях может быть вычислена как среднее разностей (или разниц) между нормированными усилениями для нисходящей линии и восходящей линии. Масштаб (или разница в усилениях), используемый для поправочных факторов в пользовательском терминале, может быть отправлен в точку доступа вместе с вычисленными поправочными факторами для точки доступа.
При наличии поправочных факторов и масштаба или разницы в усилениях характеристики нисходящего канала могут быть определены из измеренного отклика восходящего канала и наоборот. Если уровень шума либо в точке доступа, либо в пользовательском терминале изменяется, то разница в усилениях может быть обновлена, и обновленная разница в усилениях может быть отправлена в сообщении другой сущности.
В вышеприведенном описании калибровка приводила к двум наборам (векторов или матриц) поправочных факторов для каждого поддиапазона, причем один набор использовался в точке доступа для передачи данных по нисходящей линии, а другой набор использовался в пользовательском терминале для передачи данных по восходящей линии. Калибровка также может быть выполнена таким образом, что для каждого поддиапазона обеспечиваются два набора поправочных факторов, причем один набор используется в точке доступа для приема данных по восходящей линии, а второй набор используется в пользовательском терминале для приема данных по нисходящей линии. Калибровка также может быть выполнена таким образом, что для каждого поддиапазона получают один набор поправочных факторов, и этот набор может быть использован либо в точке доступа, либо в пользовательском терминале. В общем случае, калибровку выполняют таким образом, что отклики калиброванных нисходящих и восходящих каналов являются взаимно-обратными вне зависимости от того, где применяют поправочные факторы.
2. MIMO пилот-сигнал
Для калибровки MIMO пилот-сигнал передается пользовательским терминалом по восходящей линии для того, чтобы дать возможность точке доступа оценить отклик восходящего канала, и MIMO пилот-сигнал передается точкой доступа по нисходящей линии, чтобы дать возможность пользовательскому терминалу оценить отклик нисходящего канала. Для нисходящей линии и восходящей линии могут использоваться одинаковые или разные MIMO пилот-сигналы, и используемые MIMO пилот-сигналы являются известными как в точке доступа, так и в пользовательском терминале.
В одном из вариантов осуществления MIMO пилот-сигнал содержит определенный OFDM символ (обозначаемый “P”), который передают через каждую из NT передающих антенн, где NT=Nap для нисходящей линии и NT=Nut для восходящей линии. Для каждой передающей антенны один и тот же OFDM символ P передают в каждом периоде символа, назначенном для передачи MIMO пилот-сигнала. Однако OFDM символы P для каждой антенны являются покрытыми различными последовательностями Уолша с N элементарными сигналами, назначенными этой антенне, где N≥Nap для нисходящей линии и N≥Nut для восходящей линии. Покрытие Уолша поддерживает ортогональность между NT передающими антеннами и позволяет приемнику различать отдельные передающие антенны.
OFDM символ P включает в себя один символ модуляции для каждого из Nsb назначенных поддиапазонов. OFDM символ P таким образом содержит определенное “слово” из Nsb символов модуляции, которое может быть выбрано для облегчения оценки канала приемником. Это слово также может быть определено для минимизации изменений отношения пикового значения к среднему при передаче MIMO пилот-сигнала. Это уменьшает величину искажений и нелинейности, генерируемых передающими/приемными цепями, что в свою очередь приводит к улучшению точности оценки канала.
Для ясности ниже описан определенный MIMO пилот-сигнал для определенной MIMO-OFDM системы. Для этой системы как точка доступа, так и пользовательский терминал снабжены четырьмя приемными/передающими антеннами. Полоса частот системы разделена на 64 ортогональных поддиапазона (т.е. NF=64), которым присвоены индексы от +31 до -32. Из этих 64 поддиапазонов 48 поддиапазонов (например, с индексами ±{1, …, 6, 8, …, 20, 22, …, 26}) используются для данных, 4 поддиапазона (например, ±{7, 21}) используются для пилот-сигнала и, возможно, для сигнализации, поддиапазон DC (с индексом 0) не используется, и оставшиеся поддиапазоны также не используются и служат в качестве охранных поддиапазонов. Такая структура OFDM поддиапазонов более подробно описана в документе стандарта IEEE 802.11а, озаглавленном “Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) specifications: High-speed Physical Layer in the 5 GHz Band”, сентябрь 1999 год, который является общедоступным и включен в настоящее описание во всей своей полноте в качестве ссылки.
OFDM символ P включает в себя набор из 52 QPSK символов модуляции для 48 поддиапазонов данных и 4 поддиапазонов пилот-сигнала. Указанный OFDM символ P может иметь следующий вид:
P(вещественный)=g·{0,0,0,0,0,0,-1,-1,-1,-1,1,1,1,-1, -1,1,-1,1,1,1,1,-1,-1,1,-1,1,-1,-1,-1,-1,1,-1,
0,1,-1,-1,-1,-1,1,-1,-1,-1,-1,1,1,-1,-1,1,-1,-1,1,1, -1,1,-1,1,-1,1,-1,0,0,0,0,0},
P(мнимый)=g·{0,0,0,0,0,0,-1,1,1,1,-1,-1,1,-1,1,1,1,-1,1, -1,-1,-1,-1,-1,-1,1,1,-1,1,1,-1,1,
0,-1,-1,-1,-1,1,1,-1,1,-1,-1,1,-1,1,-1,1,1,1, -1,1,1,1,1,1,1,-1,-1,0,0,0,0,0},
где g представляет собой усиление для пилот-сигнала. Значения внутри скобок {} даны для поддиапазонов с индексами от -32 по -1 (для первой строки) и от 0 до +31 (для второй строки). Таким образом, первая строка для Р(вещественный) и Р(мнимый) указывает, что символ (-1-j) передается в поддиапазоне -26, символ (-1+j) передается в поддиапазоне -25 и т.д. Вторая строка для Р(вещественный) и Р(мнимый) указывает, что символ (1-j) передается в поддиапазоне 1, символ (-1-j) передается в поддиапазоне 2 и т.д. Для MIMO пилот-сигнала также могут использоваться другие OFDM символы.
В одном из вариантов осуществления четырем передающим антеннам для MIMO пилот-сигнала назначены последовательности Уолша W1=1111, W2=1010, W3=1100 W4=1001. Для данной последовательности Уолша значение “1” указывает, что передается OFDM символ P, и значение “0” указывает, что передается OFDM символ -P (т.е. каждый из 52 символов модуляции в Р является инвертированным).
В таблице 1 перечислены OFDM символы, передаваемые через каждую из четырех передающих антенн при передаче MIMO пилот-сигнала с длительностью 4 периода символов.
Для более длительных передач MIMO пилот-сигнала последовательности Уолша для каждой передающей антенны повторяются. Для такого набора последовательностей Уолша передача MIMO пилот-сигнала выполняется в течение количества периодов символов, кратного 4 периодам символов для гарантии ортогональности между четырьмя передающими антеннами.
Приемник может вывести оценку отклика канала, основываясь на принятом MIMO пилот-сигнале путем выполнения комплиментарной обработки. В частности, для восстановления пилот-сигнала, переданного через передающую антенну i и принятого приемной антенной j, пилот-сигнал, принятый приемной антенной j сначала обрабатывается с последовательностью Уолша, назначенной передающей антенне i способом, комплиментарным покрытию Уолша, выполняемому в передатчике. OFDM символы со снятым покрытием для всех Nps периодов символов для MIMO пилот-сигнала затем суммируются, причем суммирование выполняют индивидуально для каждого из 52 поддиапазонов, используемых для передачи MIMO пилот-сигнала. Результатом суммирования является  для k=±{1, …, 26}, что представляет собой оценку отклика эффективного канала от передающей антенны i до приемной антенны j (т.е. включающего в себя отклики передающих/приемных цепей) для 52 поддиапазонов данных и пилот-сигналов.
для k=±{1, …, 26}, что представляет собой оценку отклика эффективного канала от передающей антенны i до приемной антенны j (т.е. включающего в себя отклики передающих/приемных цепей) для 52 поддиапазонов данных и пилот-сигналов.
Такая же обработка может быть выполнена для восстановления пилот-сигнала от каждой передающей антенны в каждую приемную антенну. Обработка пилот-сигнала предоставляет Nap·Nut значений, которые являются элементами оценки отклика эффективного канала,  и
и  , для каждого из 52 поддиапазонов.
, для каждого из 52 поддиапазонов.
Описанная выше оценка канала может быть выполнена как точкой доступа, так и пользовательским терминалом во время калибровки для получения оценки отклика эффективного восходящего канала,  , и оценки отклика эффективного нисходящего канала,
, и оценки отклика эффективного нисходящего канала,  , соответственно, которая затем используется для вывода поправочных факторов, как описано выше.
, соответственно, которая затем используется для вывода поправочных факторов, как описано выше.
3. Пространственная обработка
Для упрощения оценки канала и пространственной обработки в точке доступа и пользовательском терминале для TDD MIMO и MIMO-OFDM систем может быть использована корреляция между откликами нисходящего и восходящего каналов. Такое упрощение является возможным после выполнения калибровки для учета различий в передающих/приемных цепях. Как указывалось выше, отклики калиброванных каналов представляют собой:
 ,
,
для нисходящей линии и ,
,
для восходящей линии.
Последнее равенство в уравнении (21b) появляется вследствие взаимосвязи между откликами эффективного нисходящего и восходящего каналов,  .
.
Матрица  отклика канала для каждого поддиапазона может быть “диагонализирована” для получения NS собственных мод для этого поддиапазона. Это может быть достигнуто либо при помощи разложения по сингулярным значениям матрицы отклика канала, либо разложения по собственным векторам корреляционной матрицы для , которая представляет собой
отклика канала для каждого поддиапазона может быть “диагонализирована” для получения NS собственных мод для этого поддиапазона. Это может быть достигнуто либо при помощи разложения по сингулярным значениям матрицы отклика канала, либо разложения по собственным векторам корреляционной матрицы для , которая представляет собой  .
.
Разложение по сингулярным значениям матрицы откликов калиброванного восходящего канала  может быть выражено как
может быть выражено как
 , для k∈K,
, для k∈K,
где  представляет собой (Nut×Nut) унитарную матрицу левых собственных векторов для
представляет собой (Nut×Nut) унитарную матрицу левых собственных векторов для  ;
;
 представляет собой (Nut×Nap) диагональную матрицу сингулярных значений для
представляет собой (Nut×Nap) диагональную матрицу сингулярных значений для  ; и
; и
 представляет собой (Nар×Nар) унитарную матрицу правых собственных векторов для
представляет собой (Nар×Nар) унитарную матрицу правых собственных векторов для  ;
;
Унитарная матрица М характеризуется свойством  , где
, где  представляет собой единичную матрицу. Соответственно, разложение по сингулярным значениям матрицы откликов калиброванного нисходящего канала,
представляет собой единичную матрицу. Соответственно, разложение по сингулярным значениям матрицы откликов калиброванного нисходящего канала,  , может быть выражено как
, может быть выражено как
 , для k∈K
, для k∈K
Таким образом, матрицы  и
и  также являются матрицами левых и правых собственных векторов, соответственно, для
также являются матрицами левых и правых собственных векторов, соответственно, для  . Матрицы
. Матрицы  ,
,  ,
,  и
и  представляют собой различные формы матрицы
представляют собой различные формы матрицы  , и матрицы
, и матрицы  ,
,  ,
,  и
и  также являются различными формами матрицы
также являются различными формами матрицы  . Для простоты ссылки на матрицы
. Для простоты ссылки на матрицы  и
и  в нижеследующем описании также могут представлять собой ссылки на их различные формы. Матрицы
в нижеследующем описании также могут представлять собой ссылки на их различные формы. Матрицы  и
и  используются в точке доступа и пользовательском терминале, соответственно, для пространственной обработки, и определены как таковые их нижними индексами.
используются в точке доступа и пользовательском терминале, соответственно, для пространственной обработки, и определены как таковые их нижними индексами.
Разложение по сингулярным значениям более подробно описано в работе Gilbert Strang, озаглавленной “Linear Algebra and Its Applications”, второе издание, Academic Press, 1980.
Пользовательский терминал может выполнить оценку отклика калиброванного нисходящего канала, основываясь на MIMO пилот-сигнале, переданном точкой доступа. После этого пользовательский терминал может выполнить разложение по сингулярным значениям оценки отклика калиброванного нисходящего канала,  , для k∈K, для получения диагональных матриц
, для k∈K, для получения диагональных матриц  и матриц
и матриц  левых собственных векторов для
левых собственных векторов для  . Такое разложение по сингулярным значениям может быть описано, как
. Такое разложение по сингулярным значениям может быть описано, как  , где знак (“ˆ”) над каждой матрицей указывает, что она является оценкой реальной матрицы.
, где знак (“ˆ”) над каждой матрицей указывает, что она является оценкой реальной матрицы.
Аналогично точка доступа может выполнить оценку отклика калиброванного восходящего канала, основываясь на MIMO пилот-сигнале, передаваемом пользовательским терминалом. Затем точка доступа может выполнить разложение по сингулярным значениям оценки отклика калиброванного восходящего канала,  , для k∈K, для получения диагональных матриц и матриц
, для k∈K, для получения диагональных матриц и матриц  левых собственных векторов для
левых собственных векторов для  , для k∈K. Такое разложение по сингулярным значениям может быть описано, как
, для k∈K. Такое разложение по сингулярным значениям может быть описано, как  .
.
Вследствие того, что канал и калибровка являются взаимно-обратными, разложение по сингулярным значениям можно выполнять либо только в пользовательском терминале, либо только в точке доступа для получения как матриц  , так и матриц
, так и матриц  . В случае выполнения в пользовательском терминале матрицы
. В случае выполнения в пользовательском терминале матрицы  используются для пространственной обработки в пользовательском терминале, а матрицы
используются для пространственной обработки в пользовательском терминале, а матрицы  могут быть переданы в точку доступа.
могут быть переданы в точку доступа.
Точка доступа также может иметь возможность получить матрицы  и , основываясь на направленном опорном сигнале, передаваемом пользовательским терминалом. Аналогично, пользовательский терминал также может иметь возможность получить матрицы
и , основываясь на направленном опорном сигнале, передаваемом пользовательским терминалом. Аналогично, пользовательский терминал также может иметь возможность получить матрицы  и , основываясь на направленном опорном сигнале, передаваемом точкой доступа. Направленный опорный сигнал подробно описан в вышеупомянутой предварительной заявке на патент США № 60/421309.
и , основываясь на направленном опорном сигнале, передаваемом точкой доступа. Направленный опорный сигнал подробно описан в вышеупомянутой предварительной заявке на патент США № 60/421309.
Матрицы  и могут быть использованы для передачи независимых потоков данных по NS собственным модам MIMO канала, где NS≤min{Nap,Nut}. Пространственная обработка для передачи множества потоков данных по нисходящей линии и восходящей линии описана ниже.
и могут быть использованы для передачи независимых потоков данных по NS собственным модам MIMO канала, где NS≤min{Nap,Nut}. Пространственная обработка для передачи множества потоков данных по нисходящей линии и восходящей линии описана ниже.
А. Пространственная обработка для восходящей линии
Пространственная обработка в пользовательском терминале для передачи по восходящей линии может быть выражена как
 , для k∈K,
, для k∈K,
где  представляет собой вектор передачи для восходящей линии для k-го поддиапазона; и
представляет собой вектор передачи для восходящей линии для k-го поддиапазона; и
 представляет собой вектор “данных” с ненулевыми элементами, количеством до NS, для символов модуляции, предназначенных для передачи по NS собственным модам k-го поддиапазона.
представляет собой вектор “данных” с ненулевыми элементами, количеством до NS, для символов модуляции, предназначенных для передачи по NS собственным модам k-го поддиапазона.
Также перед передачей может быть произведена дополнительная обработка символов модуляции. Например, для поддиапазонов данных (например, для каждой собственной моды) может быть применена инверсия канала таким образом, что ОСШ при приеме будет приблизительно одинаковым для всех поддиапазонов данных. При этом пространственная обработка может быть выражена как
 , для k∈K,
, для k∈K,
где  представляет собой матрицу весов для (необязательной) инверсии восходящего канала.
представляет собой матрицу весов для (необязательной) инверсии восходящего канала.
Инверсия канала также может быть выполнена путем назначения мощности передачи каждому поддиапазону перед выполнением модуляции, и в этом случае вектор  включает в себя коэффициенты инверсии канала, и матрица
включает в себя коэффициенты инверсии канала, и матрица  в уравнении (25) может быть опущена. В нижеследующем описании использование матрицы
в уравнении (25) может быть опущена. В нижеследующем описании использование матрицы  указывает на то, что коэффициенты инверсии канала не включены в вектор
указывает на то, что коэффициенты инверсии канала не включены в вектор  . Отсутствие матрицы
. Отсутствие матрицы  в уравнении может указывать на то, что (1) либо инверсия канала не производится, (2) либо инверсия канала производится и учтена в векторе
в уравнении может указывать на то, что (1) либо инверсия канала не производится, (2) либо инверсия канала производится и учтена в векторе  .
.
Инверсия канала может быть выполнена, как описано в вышеупомянутой предварительной заявке на патент США № 60/421309, и в заявке на патент США № 10/229209, озаглавленной “Coded MIMO Systems with Selective Channel Inversion Applied Per Eigenmode”, поданной 27 августа 2002 года, права на которую принадлежат правообладателю настоящей заявки на патент и которая включена в настоящее описание во всей своей полноте в качестве ссылки.
Принятая передача по восходящей линии в точке доступа может быть выражена как
 , для k∈K,
, для k∈K,
где  представляет собой принятый вектор для восходящей линии для k-го поддиапазона;
представляет собой принятый вектор для восходящей линии для k-го поддиапазона;
 представляет собой аддитивный белый Гауссовский шум (AWGN) для k-го поддиапазона; и
представляет собой аддитивный белый Гауссовский шум (AWGN) для k-го поддиапазона; и
 дается уравнением (24).
дается уравнением (24).
Пространственная обработка (или согласованная фильтрация) в точке доступа для принятой передачи по восходящей линии может быть выражена как

 , для k∈K,
, для k∈K,

где  представляет собой оценку вектора
представляет собой оценку вектора  , переданного пользовательским терминалом по восходящей линии, и
, переданного пользовательским терминалом по восходящей линии, и  представляет собой шум после обработки. В уравнении (27) предполагается, что инверсия канала не выполняется в передатчике и что принятый вектор
представляет собой шум после обработки. В уравнении (27) предполагается, что инверсия канала не выполняется в передатчике и что принятый вектор  имеет вид, представленный уравнением (26).
имеет вид, представленный уравнением (26).
В. Пространственная обработка для нисходящей линии
Пространственная обработка в точке доступа для передачи по нисходящей линии может быть представлена как
 , для k∈K,
, для k∈K,
где  представляет собой вектор передачи, и
представляет собой вектор передачи, и  представляет собой вектор данных для нисходящей линии.
представляет собой вектор данных для нисходящей линии.
Опять, перед передачей может быть произведена дополнительная обработка (например, инверсия канала) символов модуляции. При этом пространственная обработка может быть выражена как
 , для k∈K,
, для k∈K,
где  представляет собой матрицу весов для (необязательной) инверсии нисходящего канала.
представляет собой матрицу весов для (необязательной) инверсии нисходящего канала.
Принятая передача по нисходящей линии в пользовательском терминале может быть выражена как
 , для k∈K,
, для k∈K,

где  представляет собой вектор передачи, представленный уравнением (28).
представляет собой вектор передачи, представленный уравнением (28).
Пространственная обработка (или согласованная фильтрация) в пользовательском терминале для принятой передачи по нисходящей линии может быть выражена как

 , для k∈K
, для k∈K

В уравнении (31) предполагается, что инверсия канала не выполняется в передатчике и что принятый вектор  имеет вид, представленный уравнением (30).
имеет вид, представленный уравнением (30).
В таблице 2 представлена пространственная обработка в точке доступа и пользовательском терминале для передачи и приема данных. В таблице 2 предполагается, что дополнительная обработка  выполняется в передатчике. Однако если такая дополнительная обработка не выполняется, то может рассматриваться в качестве единичной матрицы.
выполняется в передатчике. Однако если такая дополнительная обработка не выполняется, то может рассматриваться в качестве единичной матрицы.




В приведенном выше описании и как показано в таблице 2, поправочные матрицы  и
и  используются для пространственной обработки при передаче в точке доступа и пользовательском терминале, соответственно. Это может упростить общую пространственную обработку, поскольку в любом случае (например, для инверсии канала) может требоваться масштабирование символов модуляции, и поправочные матрицы
используются для пространственной обработки при передаче в точке доступа и пользовательском терминале, соответственно. Это может упростить общую пространственную обработку, поскольку в любом случае (например, для инверсии канала) может требоваться масштабирование символов модуляции, и поправочные матрицы  и
и  могут комбинироваться с весовыми матрицами
могут комбинироваться с весовыми матрицами  и
и  для получения матриц
для получения матриц  и
и  усиления, где
усиления, где  и
и  . Обработка также может выполняться таким образом, что поправочные матрицы используются для пространственной обработки при приеме (вместо пространственной обработки при передаче).
. Обработка также может выполняться таким образом, что поправочные матрицы используются для пространственной обработки при приеме (вместо пространственной обработки при передаче).
4. Система MIMO-OFDM
Фиг.5 представляет собой блок-схему варианта осуществления точки 502 доступа и пользовательского терминала 504 в системе TDD MIMO-OFDM. Для простоты в нижеследующем описании предполагается, что и точка доступа, и пользовательский терминал оборудованы четырьмя приемными/передающими антеннами.
В случае нисходящей линии в точке 502 доступа передающий (TX) процессор 510 данных принимает данные трафика (т.е. информационные биты) из источника данных 508 и сигнализацию и другую информацию из контроллера 530. TX процессор 510 данных форматирует, кодирует, выполняет перемежение и модуляцию (т.е. отображение символов) данных для обеспечения потока символов модуляции для каждой собственной моды, используемой для передачи данных. TX пространственный процессор 520 принимает потоки символов модуляции от TX процессора 510 данных и выполняет пространственную обработку для обеспечения четырех потоков символов передачи, один поток для каждой антенны. TX пространственный процессор 520 также выполняет дополнительное мультиплексирование пилотных символов, как это требуется (например, для калибровки).
Каждый модулятор (MOD) 522 принимает и обрабатывает соответствующий поток символов передачи для обеспечения соответствующего потока OFDM символов. Каждый поток OFDM символов дополнительно обрабатывается в передающей цепи в модуляторе 522 для обеспечения соответствующего модулированного сигнала нисходящей линии. Затем четыре модулированных сигнала от модулятора 522а-522d передаются через четыре антенны 524а-524d, соответственно.
В пользовательском терминале 504 антенны 522 принимают переданные модулированные сигналы нисходящей линии и каждая антенна предоставляет принятый сигнал в соответствующий демодулятор (DEMOD) 554. Каждый демодулятор 554 (который включает в себя приемную цепь) выполняет обработку, комплиментарную выполняемой в модуляторе 522, и предоставляет принятые символы. Приемный (RX) пространственный процессор 560 затем выполняет пространственную обработку от всех демодуляторов 554 для обеспечения восстановленных символов, которые представляют собой оценки символов модуляции, переданных точкой доступа. Во время калибровки RX пространственный процессор 560 предоставляет оценку калиброванного нисходящего канала,  , основываясь на MIMO пилот-сигнале, передаваемом точкой доступа.
, основываясь на MIMO пилот-сигнале, передаваемом точкой доступа.
RX процессор 570 данных обрабатывает (например, выполняет обратное отображение символов, обратное перемежение и декодирование) восстановленных символов для обеспечения декодированных данных. Декодированные данные могут включать в себя восстановленные данные трафика, сигнализацию и т.д. и которые предоставляются потребителю 572 данных для сохранения и/или в контроллер 580 для дальнейшей обработки. Во время калибровки RX процессор 570 данных предоставляет оценку калиброванного восходящего канала,  , который выведен в точке доступа и передан по нисходящей линии.
, который выведен в точке доступа и передан по нисходящей линии.
Контроллеры 530 и 580 управляют работой различных блоков обработки в точке доступа и пользовательском терминале, соответственно. Во время калибровки контроллер 580 может принимать оценки  и
и  откликов каналов, выводить корреляционные матрицы
откликов каналов, выводить корреляционные матрицы  и
и  , предоставлять матрицы
, предоставлять матрицы  в TX пространственный процессор 592 для передачи по восходящей линии и предоставлять матрицы
в TX пространственный процессор 592 для передачи по восходящей линии и предоставлять матрицы  в TX процессор 590 данных для передачи в точку доступа. Запоминающие устройства 532 и 582 хранят данные и коды программ, используемые контроллерами 530 и 580, соответственно.
в TX процессор 590 данных для передачи в точку доступа. Запоминающие устройства 532 и 582 хранят данные и коды программ, используемые контроллерами 530 и 580, соответственно.
Обработка в случае восходящей линии может быть такой же, как и обработка в случае нисходящей линии или отличающейся от нее. Данные и сигнализация обрабатываются (например, выполняется кодирование, перемежение и модуляция) в TX процессоре 590 данных с последующей пространственной обработкой в TX пространственном процессоре 592, который также выполняет дополнительное мультиплексирование пилотных символов во время калибровки. Пилотные символы и символы модуляции дополнительно обрабатываются в модуляторах 554 для генерации модулированных сигналов восходящей линии, которые затем передаются через антенны 552 в точку доступа.
В точке 110 доступа модулированные сигналы восходящей линии принимаются антеннами 524, демодулируются в демодуляторах 522 и обрабатываются в RX пространственном процессоре 540 и RX процессоре 542 данных способом, комплиментарным выполняемому в пользовательском терминале. Во время калибровки RX пространственный процессор 560 также предоставляет оценку  калиброванного восходящего канала, основываясь на MIMO пилот-сигнале, передаваемом пользовательским терминалом. Матрицы
калиброванного восходящего канала, основываясь на MIMO пилот-сигнале, передаваемом пользовательским терминалом. Матрицы  принимаются контроллером 530 и затем предоставляются в TX процессор 510 данных для передачи в пользовательский терминал.
принимаются контроллером 530 и затем предоставляются в TX процессор 510 данных для передачи в пользовательский терминал.
Фиг.6 представляет собой блок-схему TX пространственного процессора 520а, который может быть использован в качестве TX пространственных процессоров 520 и 592 по Фиг.5. Для простоты в нижеследующем описании предполагается, что для использования выбраны все четыре собственные моды.
В процессоре 520а демультиплексор 632 принимает четыре потока символов модуляции (обозначенных s1(n)-s4(n)) для передачи на четырех собственных модах, демультиплексирует каждый поток на ND подпотока для ND поддиапазонов данных и предоставляет четыре подпотока символов модуляции для каждого поддиапазона в соответствующий TX пространственный процессор 640 поддиапазона. Каждый процессор 640 выполняет обработку, описываемую уравнением (24), (25), (28) или (29), для одного поддиапазона.
В каждом TX пространственном процессоре 640 поддиапазона четыре подпотока (обозначаемые s1(k)-s4(k)) символов модуляции предоставляются в четыре умножителя 642а-642d, которые также принимают усиления g1(k), g2(k), g3(k) и g4(k) для четырех собственных мод соответствующего поддиапазона. В случае нисходящей линии четыре усиления для каждого поддиапазона данных представляют собой диагональные элементы соответствующей матрицы  , где
, где  или
или  . В случае восходящей линии усиление представляет собой диагональные элементы матрицы
. В случае восходящей линии усиление представляет собой диагональные элементы матрицы  , где
, где  или
или  . Каждый умножитель 642 выполняет масштабирование его символов модуляции на соответствующее усиление gm(k) для предоставления масштабированных символов модуляции. Умножители 642а-642d предоставляют четыре потока масштабированных символов модуляции в четыре формирователя 650а-650d лучей, соответственно.
. Каждый умножитель 642 выполняет масштабирование его символов модуляции на соответствующее усиление gm(k) для предоставления масштабированных символов модуляции. Умножители 642а-642d предоставляют четыре потока масштабированных символов модуляции в четыре формирователя 650а-650d лучей, соответственно.
Каждый формирователь 650 луча выполняет формирование луча для передачи одного подпотока символов в одной собственной моде одного поддиапазона. Каждый формирователь 650 пучка принимает один подпоток sm(k) масштабированных символов и выполняет формирование пучка, используя собственный вектор  для соответствующей собственной моды. В каждом формирователе 650 пучка масштабированные символы модуляции предоставляются в четыре умножителя 652а-652d, которые также принимают четыре элемента
для соответствующей собственной моды. В каждом формирователе 650 пучка масштабированные символы модуляции предоставляются в четыре умножителя 652а-652d, которые также принимают четыре элемента  ,
,  ,
,  и
и  , собственного вектора для соответствующей собственной моды. Собственный вектор представляет собой m-й столбец матрицы
, собственного вектора для соответствующей собственной моды. Собственный вектор представляет собой m-й столбец матрицы  для нисходящей линии, и представляет собой m-й столбец матрицы
для нисходящей линии, и представляет собой m-й столбец матрицы  для восходящей линии. Каждый умножитель 652 затем выполняет умножение масштабированных символов модуляции на соответствующее значение
для восходящей линии. Каждый умножитель 652 затем выполняет умножение масштабированных символов модуляции на соответствующее значение  собственного вектора для предоставления “обработанных для формирования луча” символов. Умножители 652a-652d предоставляют четыре подпотока обработанных для формирования луча символов (которые предназначены для передачи через четыре антенны) в сумматоры 660a-660d, соответственно.
собственного вектора для предоставления “обработанных для формирования луча” символов. Умножители 652a-652d предоставляют четыре подпотока обработанных для формирования луча символов (которые предназначены для передачи через четыре антенны) в сумматоры 660a-660d, соответственно.
Каждый сумматор 660 принимает и суммирует четыре обработанных для формирования луча символа для четырех собственных мод для каждого периода символа для обеспечения подвергнутого предварительной обработке символа для соответствующей передающей антенны. Сумматоры 660a-660d предоставляют четыре подпотока подвергнутых предварительной обработке символа, для четырех передающих антенн в буферы/мультиплексоры 670a-670d, соответственно.
Каждый буфер/мультиплексор 670 принимает пилотные символы и подвергнутые предварительной обработке символы от TX пространственных процессоров 640 поддиапазонов для ND поддиапазонов данных. Каждый буфер/мультиплексор 670 затем мультиплексирует пилотные символы, подвергнутые предварительной обработке символы и нули для пилотных поддиапазонов, поддиапазонов данных и неиспользуемых поддиапазонов, соответственно, для формирования последовательности из NF символов передачи для данного периода символа. Во время калибровки пилотные символы передаются по назначенным поддиапазонам. Умножители 668а-668d выполняют покрытие пилотных символов для четырех антенн последовательностями Уолша W1-W4, соответственно, назначенными четырем антеннам, как описано выше и показано в таблице 1. Каждый буфер/мультиплексор 670 предоставляет поток символов xi(n) передачи для одной передающей антенны, причем поток символов передачи содержит последовательно соединенные последовательности из NF символов передачи.
Пространственная обработка и OFDM модуляция более подробно описаны в вышеупомянутой предварительной заявке на патент США № 60/421309.
В различных вариантах осуществления настоящего изобретения, изложенных в настоящем описании, может быть реализована одноранговая связь между различными пользовательскими терминалами (UT или STA) в пределах одной базовой зоны обслуживания (BSS) или различных BSS, как описано ниже. UT или STA, которые выполнили калибровку с одной точкой доступа (AP), являются членами базовой зоны обслуживания (BSS). Одна точка доступа представляет собой общий узел для всех UT в BSS. Способы калибровки, описанные выше, облегчают следующие типы коммуникации:
(i) UT в BSS может использовать направленную передачу (TX) для прямой связи с AP по восходящей линии (UL), и AP может использовать направленную передачу (TX) для связи с UT по нисходящей линии (DL).
(ii) UT в BSS может непосредственно обмениваться данными с другим UT в той же BSS, используя направленную связь. В этом случае такая одноранговая связь должна быть предварительно инициирована, поскольку ни один из UT не имеет сведений о канале между ними. В различных вариантах осуществления процедура предварительной инициации работает следующим образом:
- инициатор одноранговой линии является AP-источником (DAP), а другой UT является UT-приемником (DUT).
- DAP посылает MIMO пилот-сигнал для DUT вместе с запросом на установление линии, который содержит BSS ID и DAP ID. Запрос должен быть отправлен в общем режиме (т.е. с разнесением при передаче).
- DUT отвечает путем отправки направленного MIMO пилот-сигнала и подтверждения, которое содержит DUT ID, его BSS ID и некоторый индикатор скорости передачи для использования в DAP.
- Затем DAP может использовать направленную передачу по DL и DUT может использовать направленную передачу по UL. Управление скоростью и трекинг могут осуществляться при помощи разделения передач на сегменты DL и UL с достаточными интервалами времени между ними для выполнения обработки.
(iii) UT, которые принадлежат одной BSS (например, BSS1), могут использовать направленную передачу в UT, которые принадлежат другой BSS (например, BSS2), даже если каждый из них выполнил калибровку с различной AP. Однако в этом случае имеется неопределенность в фазовом угле (для каждого поддиапазона). Это происходит вследствие того, что процедура калибровки, описанная выше, устанавливает отношение, которое является уникальным для AP, с которой была выполнена калибровка. Указанное отношение представляет собой комплексную константу,
где k представляет собой индекс поддиапазона и j представляет собой индекс AP, а 0 представляет собой индекс референсной антенны (например, антенны 0), используемой в AP. В одном из вариантов осуществления эта константа является общей для всех UT в данной BSS, но является независимой для различных BSS.
В результате, когда UT из BSS1 обменивается данными с UT в BSS2, направленная связь без коррекции или компенсации для этой константы может привести в результате к сдвигу фазы и масштабированию амплитуды всей собственной системы. Сдвиг фазы может быть определен при помощи использования пилот-сигнала (направленного или ненаправленного) и удален в приемниках каждого соответствующего UT. В одном варианте осуществления амплитудная коррекция или компенсация может представлять собой обыкновенное масштабирование ОСШ и может быть удалена при помощи оценки уровня шума в каждом приемнике, что может оказать воздействие на выбор скорости передачи.
В различных вариантах осуществления одноранговый обмен между UT, которые принадлежат различным BSS, может выполняться следующим образом:
- инициатор одноранговой линии (например, UT BSS1) является AP-источником (DAP), а другой UT (например, UT BSS2) является UT-приемником (DUT).
- DAP посылает MIMO пилот-сигнал для DUT вместе с запросом на установление линии, который содержит BSS ID и DAP ID. Запрос должен быть отправлен в общем режиме (т.е. с разнесением при передаче).
- DUT отвечает путем отправки направленного MIMO пилот-сигнала и подтверждения, которое содержит DUT ID, его BSS ID и некоторый индикатор скорости передачи для использования в DAP.
- DAP приемник (Rx) может выполнить оценку сдвига фазы для восходящей линии (UL) и применить поправочную константу для каждого поддиапазона. Затем DAP может использовать направленную передачу по нисходящей линии (DL), но должен включить преамбулу направленного опорного сигнала, по меньшей мере, в первый направленный пакет для того, чтобы дать возможность DUT приемнику (Rx) выполнить коррекцию или компенсацию сдвига фазы в DL для каждого поддиапазона. Для последующих передач по DL может не требоваться преамбула с направленным референсным сигналом. Управление скоростью и трекинг могут осуществляться при помощи разделения передач на сегменты DL и UL с достаточными интервалами времени между ними для выполнения обработки.
Способы калибровки, изложенные в настоящем описании, могут быть реализованы при помощи различных средств. Например, эти способы могут быть реализованы в виде аппаратных средств, программных средств или их комбинации. В случае реализации в виде аппаратных средств способы могут быть реализованы в точке доступа и пользовательском терминале в одной или нескольких ориентированных на приложение интегральных схемах (ASIC), цифровых сигнальных процессорах (DSP), цифровых сигнальных процессорных устройствах (DSPD), программируемых логических устройствах (PLD), внутрисхемно программируемых вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, других электронных блоках, выполненных с возможностью выполнения функций, изложенных в настоящем описании или их комбинации.
В случае осуществления в виде программных средств способы калибровки могут быть реализованы при помощи модулей (например, процедур, функций и т.д.), которые выполняют функции, изложенные в настоящем описании. Программные коды могут храниться в запоминающем устройстве (например, запоминающих устройствах, 532 и 582 по Фиг.5) и выполняться процессором (например, контроллерами 530 и 580, соответственно). Запоминающее устройство может быть выполнено в процессоре или как внешнее по отношению к процессору, причем в этом случае оно может быть соединено с возможностью обмена данными с процессором при помощи различных средств, известных в данной области техники.
Заголовки включены в настоящее описание для ссылки и для помощи в поиске определенных разделов. Указанные заголовки не следует рассматривать как ограничивающие объем концепций в озаглавленных ими разделах, и эти концепции могут применяться в других разделах по всему описанию.
Приведенное выше описание раскрытых вариантов осуществления представлено для того, чтобы дать возможность любому специалисту в данной области техники использовать настоящее изобретение. Различные модификации в отношении указанных вариантов осуществления должны быть очевидны для специалистов в данной области техники, и общие принципы, изложенные в настоящем описании, применимы к другим вариантам осуществления без отступления от сущности и объема настоящего изобретения. Таким образом, настоящее изобретение не следует ограничивать вариантами осуществления, раскрытыми в настоящем описании, но напротив, соответствует самому широкому объему, совместимому с принципами и новыми отличительными особенностями, раскрытыми в настоящем описании.

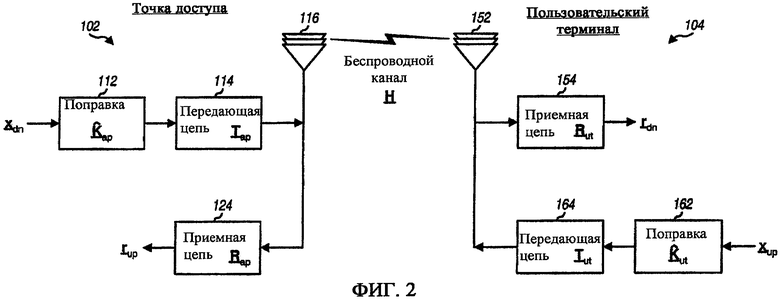
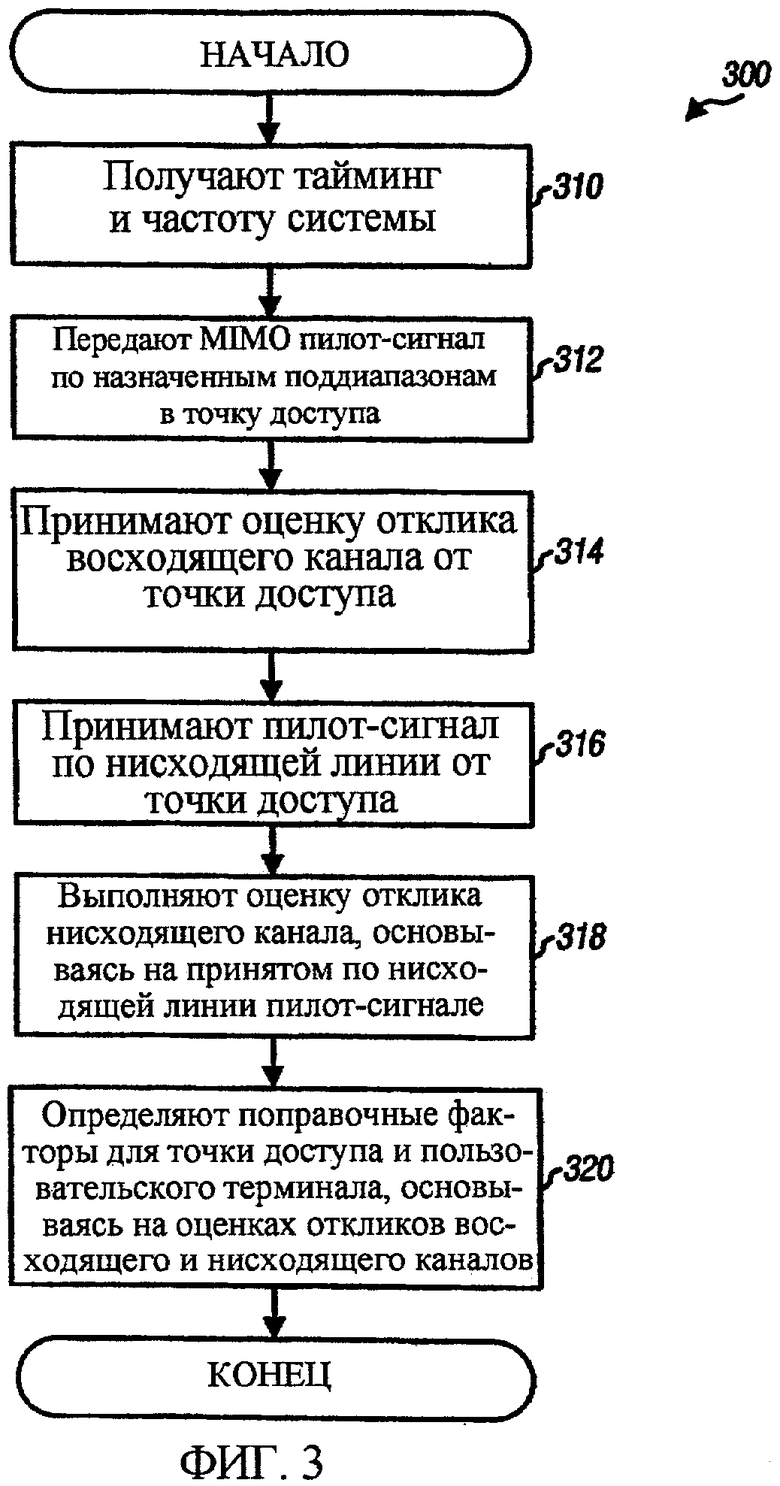
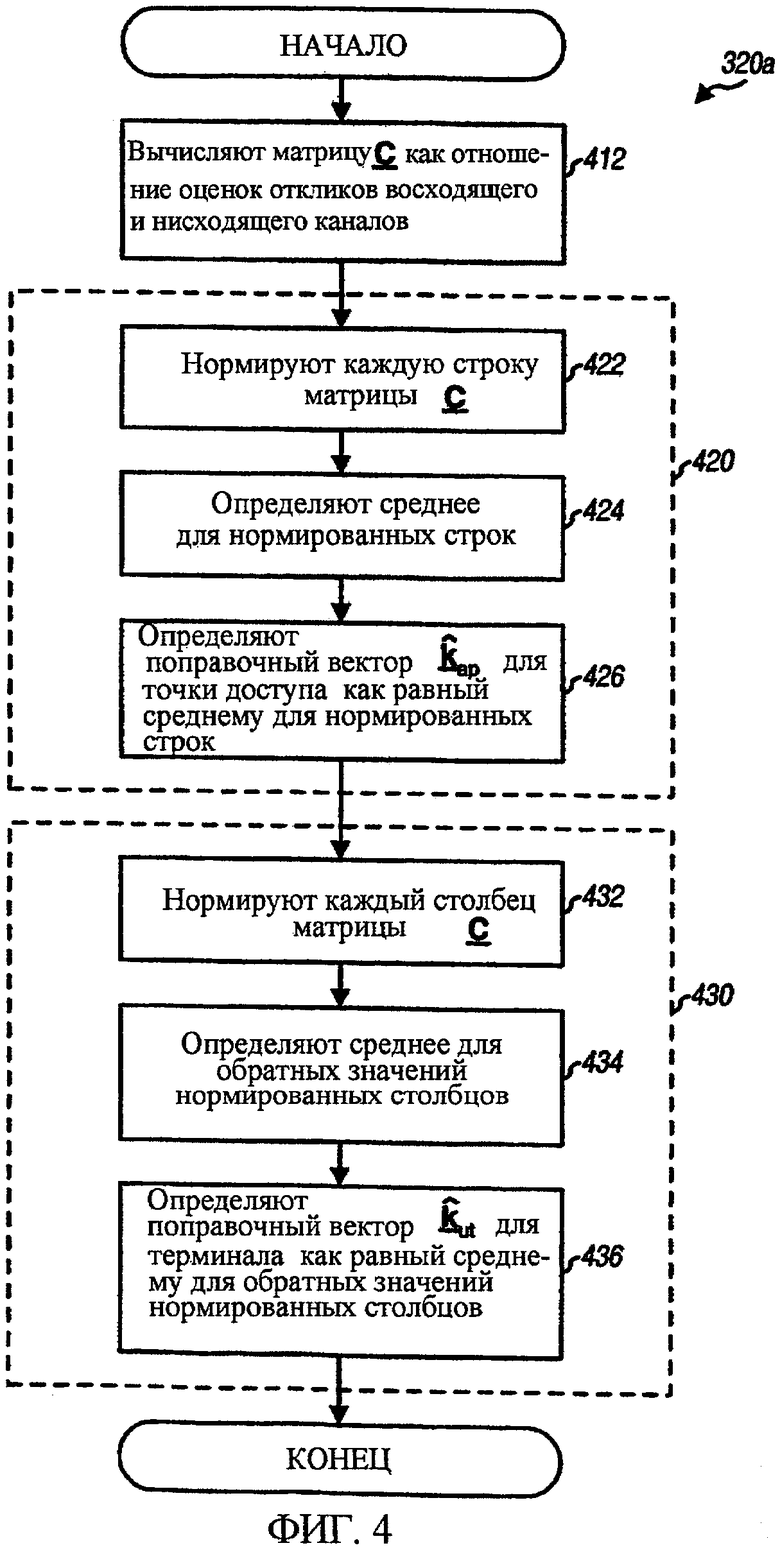

Раскрыты способы калибровки восходящего и нисходящего каналов. Технический результат заключается в учете различий в частотных откликах передающих и приемных цепей в точке доступа и пользовательском терминале. Для этого в одном из вариантов осуществления пилот-сигналы передают по нисходящему и восходящему каналам и используют для вывода оценок откликов нисходящего и восходящего каналов, соответственно. Затем определяют два набора поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов. Калиброванный нисходящий канал формируют, используя первый набор поправочных факторов для нисходящего канала, и калиброванный восходящий канал формируют, используя второй набор поправочных факторов для восходящего канала. Первый и второй наборы поправочных факторов могут быть определены, используя вычисления отношения матриц или вычисление с минимальной среднеквадратичной ошибкой (MMSE). Калибровка может выполняться в реальном масштабе времени, основываясь на передаче по радиоканалу. 6 н. и 32 з.п. ф-лы, 6 ил., 2 табл.
1. Способ установления одноранговых связей посредством первого пользовательского терминала (UT) в беспроводной коммуникационной системе, содержащий этапы, на которых:
получают оценку отклика нисходящего канала;
получают оценку отклика восходящего канала;
определяют первый и второй наборы поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов;
калибруют нисходящий канал и восходящий канал, основываясь на первом и втором наборах поправочных факторов соответственно, для формирования калиброванного нисходящего канала и калиброванного восходящего канала; и
устанавливают непосредственную одноранговую связь со вторым пользовательским терминалом без дополнительной калибровки между первым и вторым пользовательскими терминалами.
2. Способ по п.1, в котором первый набор поправочных факторов используют для масштабирования символов перед передачей по нисходящему каналу, и второй набор поправочных факторов используют для масштабирования символов перед передачей по восходящему каналу.
3. Способ по п.1, в котором первый набор поправочных факторов используют для масштабирования символов, принятых по нисходящему каналу, и второй набор поправочных факторов
используют для масштабирования символов, принятых по восходящему каналу.
4. Способ по п.1, в котором первый и второй наборы поправочных факторов определяют, основываясь на следующем уравнении:

где  представляет собой матрицу оценки отклика нисходящего канала,
представляет собой матрицу оценки отклика нисходящего канала,
 представляет собой матрицу оценки отклика восходящего канала,
представляет собой матрицу оценки отклика восходящего канала,
 представляет собой матрицу первого набора поправочных факторов,
представляет собой матрицу первого набора поправочных факторов,
 представляет собой матрицу второго набора поправочных факторов, и
представляет собой матрицу второго набора поправочных факторов, и
T обозначает транспонирование.
5. Способ по п.4, в котором определение первого и второго наборов поправочных факторов включает в себя вычисление матрицы С в виде поэлементного отношения матрицы  и матрицы
и матрицы  и вывод матриц и
и вывод матриц и  основываясь на матрице С.
основываясь на матрице С.
6. Способ по п.5, в котором вывод матрицы включает в себя нормирование каждой из множества строк матрицы С, и определение среднего для множества нормированных строк матрицы С, причем матрицу формируют, основываясь на указанном среднем для множества нормированных строк.
7. Способ по п.5, в котором вывод матрицы  включает в себя нормирование каждого из множества столбцов матрицы С и определение среднего для обратных значений множества нормированных столбцов матрицы С, причем матрицу формируют, основываясь на указанном среднем для обратных значений множества нормированных столбцов.
включает в себя нормирование каждого из множества столбцов матрицы С и определение среднего для обратных значений множества нормированных столбцов матрицы С, причем матрицу формируют, основываясь на указанном среднем для обратных значений множества нормированных столбцов.
8. Способ по п.4, в котором матрицы и выводят, основываясь на вычислении с минимальной среднеквадратичной ошибкой (MMSE).
9. Способ по п.8, в котором при вычислении MMSE минимизируют среднеквадратичную ошибку (MSE), выраженную как

10. Способ по п.1, дополнительно включающий в себя этап, на котором определяют значение масштаба, соответствующего среднему различию между оценкой отклика нисходящего канала и оценкой отклика восходящего канала.
11. Способ по п.1, в котором оценки откликов нисходящего и восходящего каналов нормализуют для учета уровня шума в приемнике.
12. Способ по п.1, в котором определение выполняют в пользовательском терминале.
13. Способ по п.4, в котором первый набор матриц поправочных факторов для нисходящего канала определяют для первого набора поддиапазонов, причем способ дополнительно содержит этап, на котором выполняют интерполяцию первого набора матриц для получения второго набора матриц поправочных факторов для нисходящего канала для второго набора поддиапазонов.
14. Способ по п.1, в котором оценки откликов нисходящего и восходящего каналов получают, основываясь на пилот-сигнале, передаваемом через множество антенн и ортогонализированном при помощи множества ортогональных последовательностей.
15. Способ по п.1, в котором оценку отклика восходящего канала получают, основываясь на пилот-сигнале, передаваемом по восходящему каналу, и в котором оценку отклика нисходящего канала получают, основываясь на пилот-сигнале, передаваемом по нисходящему каналу.
16. Способ по п.1, в котором TDD система представляет собой систему с множеством входов и множеством выходов (MIMO).
17. Способ по п.1, в котором TDD система использует мультиплексирование с ортогональным делением частот (OFDM).
18. Способ установления одноранговых связей посредством первого пользовательского терминала (UT) в беспроводной коммуникационной системе дуплексной связи с временным разделением (TDD) с множеством входов и множеством выходов (MIMO), содержащий этапы, на которых передают пилот-сигнал по восходящему каналу;
получают оценку отклика восходящего канала, выведенную, основываясь на пилот-сигнале, передаваемом по восходящему каналу;
принимают пилот-сигнал по нисходящему каналу;
получают оценку отклика нисходящего канала, выведенную, основываясь на пилот-сигнале, передаваемом по нисходящему каналу; и
определяют первый и второй наборы поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов, причем калиброванный нисходящий канал формируют с использованием первого набора поправочных факторов для нисходящего канала и калиброванный восходящий канал формируют с использованием первого набора поправочных факторов для восходящего канала; и
устанавливают непосредственную одноранговую связь со вторым пользовательским терминалом без дополнительной калибровки между первым и вторым пользовательскими терминалами.
19. Способ по п.18, в котором первый и второй наборы поправочных факторов определяют, основываясь на вычислении с минимальной среднеквадратичной ошибкой (MMSE).
20. Способ по п.18, в котором первый и второй наборы поправочных факторов определяют, основываясь на вычислении отношения матриц.
21. Способ по п.18, в котором первый набор поправочных факторов обновляют, основываясь на калибровке, выполняемой с множеством пользовательских терминалов.
22. Способ по п.18, дополнительно содержащий этап, на котором масштабируют символы при помощи первого набора поправочных факторов перед передачей по нисходящей линии.
23. Способ по п.18, дополнительно содержащий этап, на котором масштабируют символы при помощи второго набора поправочных факторов перед передачей по восходящей линии.
24. Первый пользовательский терминал (UT) для определения поправочных факторов в беспроводной коммуникационной системе дуплексной связи с временным разделением (TDD) с множеством входов и множеством выходов (MIMO), содержащий
средство для получения оценки отклика нисходящего канала;
средство для получения оценки отклика восходящего канала;
средство определения первого и второго наборов поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов, причем калиброванный нисходящий канал формируют с использованием первого набора поправочных факторов для нисходящего канала и калиброванный восходящий канал формируют с использованием второго набора поправочных факторов для восходящего канала; и
средство для установления непосредственной одноранговой связи со вторым пользовательским терминалом без дополнительной калибровки между первым и вторым пользовательскими терминалами.
25. Пользовательский терминал в беспроводной коммуникационной системе дуплексной связи с временным разделением (TDD), содержащий
ТХ пространственный процессор, выполненный с возможностью передачи первого пилот-сигнала по восходящему каналу;
RX пространственный процессор, выполненный с возможностью приема второго пилот-сигнала по нисходящему каналу и вывода оценки отклика нисходящего канала, основываясь на принятом втором пилот-сигнале, и приема оценки отклика восходящего канала, выведенной, основываясь на переданном первом пилот-сигнале; и
контроллер, выполненный с возможностью определения первого и второго наборов поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов, причем калиброванный нисходящий канал формируют с использованием первого набора поправочных факторов для нисходящего канала и калиброванный восходящий канал формируют с использованием второго набора поправочных факторов для восходящего канала, и определение первого и второго наборов поправочных факторов, основываясь на вычислении с минимальной среднеквадратичной ошибкой (MMSE).
26. Пользовательский терминал по п.25, в котором контроллер дополнительно выполнен с возможностью определения первого и второго наборов поправочных факторов, основываясь на вычислении отношения матриц.
27. Способ связи в беспроводной системе, содержащий этапы, на которых
калибруют одну или несколько коммуникационных линий между множеством пользовательских станций и одной или несколькими точками доступа, основываясь на одном или нескольких наборах поправочных факторов, выведенных из оценок откликов каналов, связанных с одной или несколькими коммуникационными линиями, причем множество пользовательских станций включает в себя первую пользовательскую станцию и вторую пользовательскую станцию; и
устанавливают связь между первой и второй пользовательскими станциями, используя направленную связь, без выполнения калибровки между первой и второй пользовательскими станциями, и основываясь на упомянутых одном или нескольких наборах поправочных факторов.
28. Способ по п.27, в котором установление связи между первой и второй пользовательскими станциями содержит этапы, на которых
посылают от первой пользовательской станции пилот-сигнал и запрос на установление коммуникационной линии со второй пользовательской станцией;
посылают от второй пользовательской станции направленный пилот-сигнал и подтверждение в ответ на прием пилот-сигнала и запроса от первой пользовательской станции;
передают информацию между первой и второй пользовательскими станциями, используя направленную связь, основанную на направленном пилот-сигнале.
29. Способ по п.28, в котором запрос на установление связи содержит идентификатор базовой зоны обслуживания, которому принадлежит первая пользовательская станция, и идентификатор первой пользовательской станции.
30. Способ по п.28, в котором подтверждение содержит идентификатор второй пользовательской станции, идентификатор базовой зоны обслуживания, которому принадлежит вторая пользовательская станция, и указатель скорости передачи данных.
31. Способ по п.27, в котором одна или несколько точек доступа включают в себя первую точку доступа, связанную с первой базовой зоной обслуживания (BSS), и вторую точку доступа, связанную со второй BSS, причем первая пользовательская станция калибрована в отношении первой точки доступа, а вторая пользовательская станция калибрована в отношении второй точки доступа, и установление связи между первой и второй пользовательскими станциями содержит этапы, на которых
посылают от первой пользовательской станции пилот-сигнал и запрос на установление коммуникационной линии со второй пользовательской станцией; посылают от второй пользовательской станции направленный пилот-сигнал и подтверждение в ответ на прием пилот-сигнала и запроса от первой пользовательской станции; и
передают информацию между первой и второй пользовательскими станциями, используя направленную связь, которая настроена для компенсации сдвига фазы, вследствие калибровки первой и второй пользовательских станций по отношению к разным точкам доступа.
32. Способ по п.31, в котором сдвиг фазы определяют, основываясь на направленном пилот-сигнале, принимаемом от второй пользовательской станции.
33. Устройство для осуществления связи в беспроводной системе, содержащее
средство для калибровки одной или нескольких коммуникационных линий между множеством пользовательских станций и одной или несколькими точками доступа, основываясь на одном или нескольких наборах поправочных факторов, выведенных из оценок откликов каналов, связанных с одной или несколькими коммуникационными линиями, причем множество пользовательских станций включает в себя первую пользовательскую станцию и вторую пользовательскую станцию; и
средство для установки связи между первой и второй пользовательскими станциями, используя направленную связь, без выполнения калибровки между первой и второй пользовательскими станциями, и основываясь на упомянутых одном или нескольких наборах поправочных факторов.
34. Устройство по п.33, в котором установление связи между первой и второй пользовательскими станциями содержит
средство для отправки из первой пользовательской станции пилот-сигнала и запроса на установление коммуникационной линии со второй пользовательской станцией;
средство для отправки из второй пользовательской станции направленного пилот-сигнала и подтверждения в ответ на прием пилот-сигнала и запроса от первой пользовательской станции;
средство для передачи информации между первой и второй пользовательскими станциями, используя направленную связь, основанную на направленном пилот-сигнале.
35. Устройство по п.34, в котором запрос на установление связи содержит идентификатор базовой зоны обслуживания, которой принадлежит первая пользовательская станция, и идентификатор первой пользовательской станции.
36. Устройство по п.34, в котором подтверждение содержит идентификатор второй пользовательской станции, идентификатор базовой зоны обслуживания, которой принадлежит вторая пользовательская станция, и указатель скорости передачи данных.
37. Устройство по п.33, в котором одна или несколько точек доступа включают в себя первую точку доступа, связанную с первой базовой зоной обслуживания (BSS), и вторую точку доступа, связанную со второй BSS, причем первая пользовательская станция калибрована в отношении первой точки доступа, а вторая пользовательская станция калибрована в отношении второй точки доступа, и установление связи между первой и второй пользовательскими станциями содержит этапы, на которых
средство для посылки от первой пользовательской станции пилот-сигнала и запроса на установление коммуникационной линии со второй пользовательской станцией;
средство для посылки от второй пользовательской станции направленный пилот-сигнала и подтверждения в ответ на прием пилот-сигнала и запроса от первой пользовательской станции;
средство для передачи информации между первой и второй пользовательскими станциями, используя направленную связь, которая настроена для компенсации сдвига фазы, вследствие калибровки первой и второй пользовательских станций по отношению к разным точкам доступа.
38. Устройство по п.37, в котором сдвиг фазы определяют, основываясь на направленном пилот-сигнале, принимаемом от второй пользовательской станции.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| УСТРОЙСТВО ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ | 1997 |
|
RU2141722C1 |
| US 6144711 A, 07.11.2000 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

