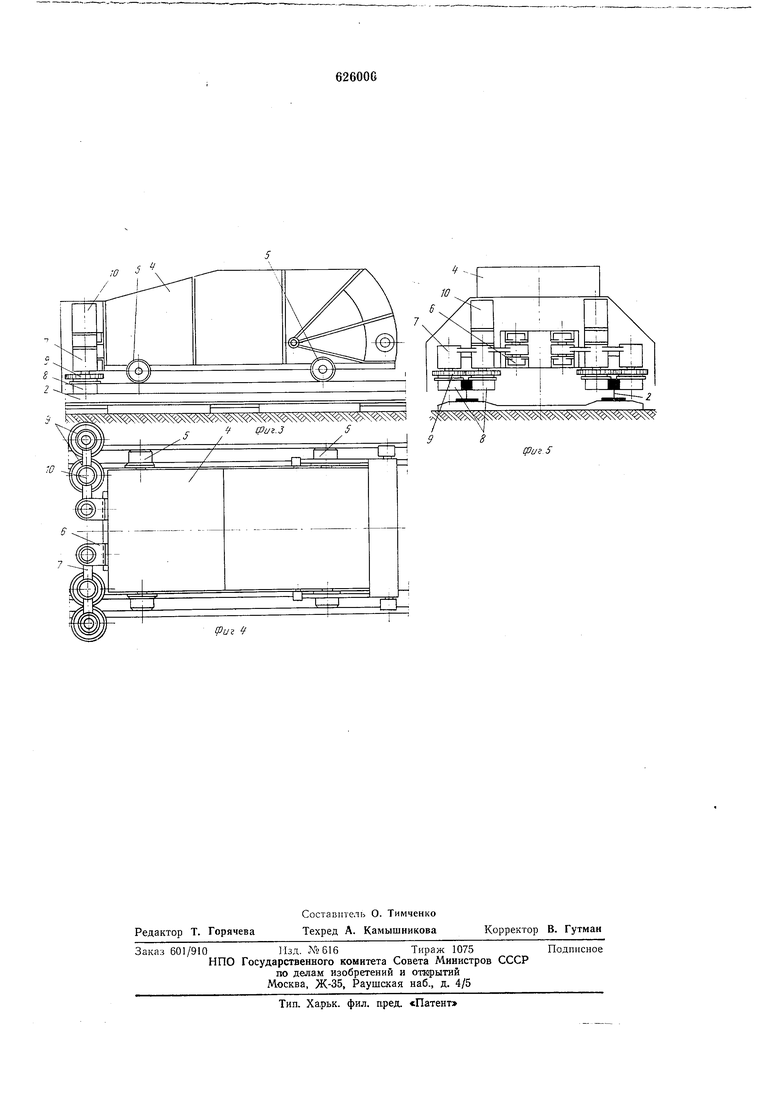
нен.ный ,в виде прикрепленной к кузову 4 посредсивам подвижных шарн-иров 6 пары рычагов 7, на сво бодном .конце каждого из которых смОНТИрована пара охватывающих голов«у на1прав.л1яющей приводных роликов 8. При этом приводные ролики 8 расположены в плоскости, параллельной верхней грани головок, а рычаги 7, несущие ролики 8, установлены .перпендикулярно боковым граням голаво.к направляющих.
Приводиые ролики 8 .на рычатах 7 установлены с зазором между их поверхностями качения, допускающим расположение в нем головки направляющей. Каждая пара ариводных роликов 8 связана цилиндрическими щестернями Я при этом один из роликов 8 соединен с фланщевы м моторомредуктором 10, укрепленном на рычаге 7.
Мотор-редуктор 10 содержит электродвигатель и са:мот Ормоая ЩИЙС1Я, например, червячный редуктор. Подача электроэнерГИ1И на двигатели привода механизма перемещения осуществляется от ,ллей посредством установленных на сосуде 1 токосъем.никав. Кузо-в 4 самоходных сосудов оборудован открывающимся днищем или секторным затвором, установленным на месте задней стенки.
Работает подъемник следующим образом.
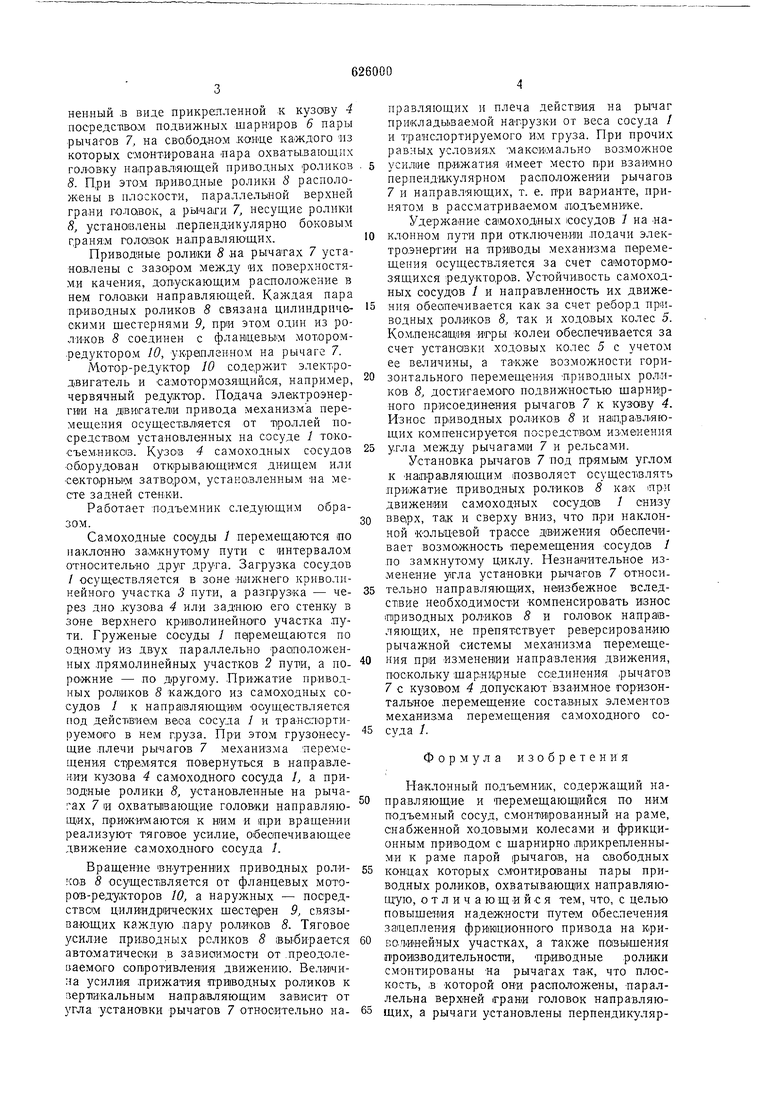
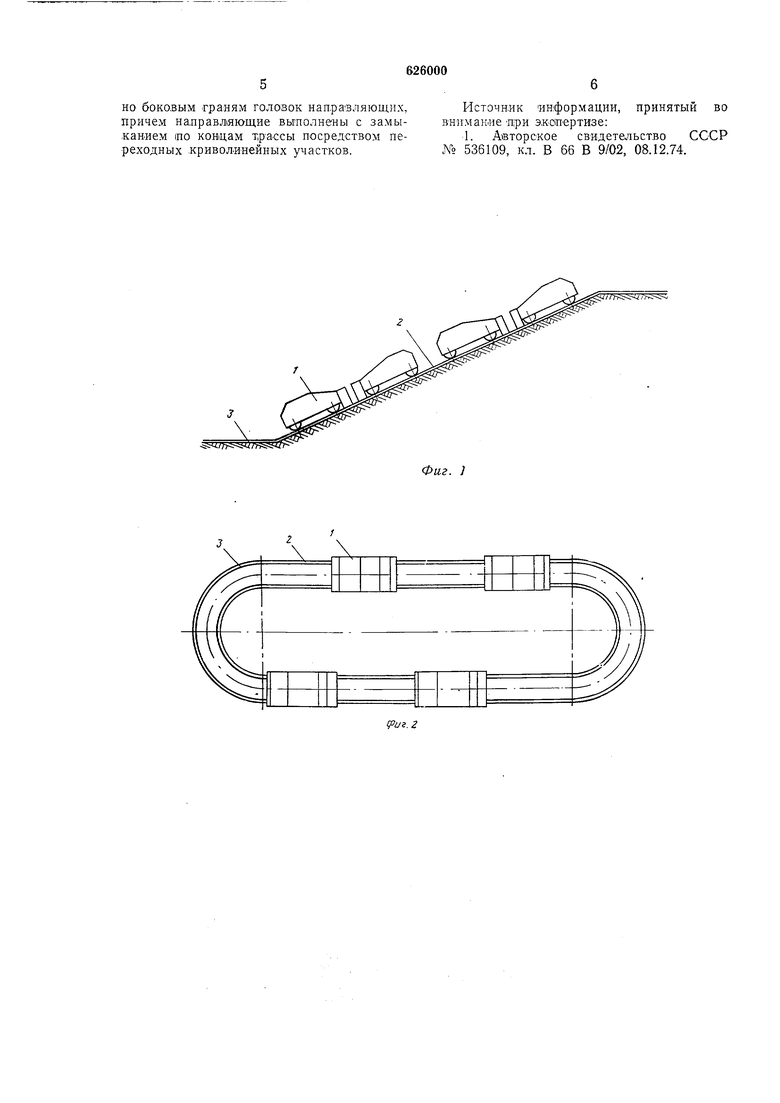
Самоходные сосуды 1 перемещаются ио наклонно за.мкнутому пути с интервалом относительно друг друга. Загрузка сосудов / осуществляется в зоне «(ижнего криволинейного участка 3 пути, а разгрузка - через дно .кузова 4 или заднюю его стенку в зоне верхнего кр-иволинейного участка .пути. Груженые сосуды 1 пе1ремещаются по одному из двух параллельно расположенных .прямолинейных участков 2 пут1и, а порожние - по другому. .Прижатие приводных роликов 8 каждого из самоходных сосудов / к направляющим ооуществ.ляетС:Я под действием веса сосуда 1 и транспортируемого в нем груза. При этом грузонесущие ллечи рьгчагов 7 механизма перемещения спрем.ятся повернуться в направлении кузова 4 самоходного сосуда 1, а призодные ролики 8, установленные на рычагах 7 и охватывающие голоаки направляющих, приЖИмаютоя к ним и три вращении реализуют тяговое усилие, обеспечивающее движение самоходно.го сосуда 1.
Вращение внутренних приводных роликов 8 осуществляется от фланцевых моторов-редукторов 10, а наружных - посредством цилиндрических щвсте1рен 9, связывающих каждую .пару рол.иков 8. Тяговое усилие приводных роликов 8 выбирается автоматически в завиаимости от .преодолеваемого оопротив.ления движению. Вел.имина усилия прижатия приводных роликов к перт1ика.льным н-аправляющим зависит от угла установки рычагов 7 относительно на.
правляющих и плеча действия на рычаг прикладываемой нагрузки от веса сосуда / и транспортируемого им груза. При прочих равных условиях максимально возможное усилие прижатия имеет место при взаимно перпендикулярном расположении рычагов 7 и направляющих, т. е. при варианте, принятом в рассматриваемом подъемнике.
Удержание самоходных сосудов 1 на .наклонном пути при отключен.ии подачи электро.энергии на прнводы механизма перемещения осуществляется за счет самотормозящихся редукторов. Устойчивость самоходных сосудов / и направленность их движения обеспечивается как за счет реборд пр водных рол.иков 8, так и ходовых колес 5. Ком,пен.са|Ц1И я игры колеи обеспечивается за счет установки ходовых колес 5 с учетом ее вачичины, а также возможности горизонтального перемещения приводных роликов 8, достигаемого подвижностью щарнврного присоединения рычагов 7 к кузову 4. Износ приводных роликов 8 и на:правл1яющих компенсируется посредством изменения угла между рычагами 7 и рельсами.
Установка рычагов 7 под прямьш углом к На1Пра.вляю.щим позволяет осуществлять прижатие приводных роликов 8 как при движении самоходных сосудов / снизу BBeipx, та,к и сверху вниз, что при наклонной кольцевой траосе движения обеспечивает возможность перемещения сосудов / по замкнутому циклу. Незна чительное изменение угла установки рычагов 7 относительно направляющих, неизбежное вследствие необходимости компенсировать износ ориводных роликов 5 и ГОЛОВО.К направляющих, не препятствует реверсированию рычажной системы механизма перемещения при изменении направления движения, поскольку щарнцрные саединения .рычагов 7 с кузо.ВОМ 4 допускают взаимное го.ризонталБное .перемещение соста.вных элементов механизма перемещения самоходного сосуда /.
Формула изобретения
Наклонный подъемник, содержащий направляющие и перемещающийся по ним подъемный сосуд, смонтированный на раме, снабженной ходовыми колесами и фрикционным приводом с щарнирно прикрепленными к раме парой рычагов, на свободных концах которых смонтированы пары приводных роликов, охватывающих направл яющую, отличающ.ийся тем, что, с целью повыщения нaдeiЖHOcти путем обеспечения зацепления фрииционного привода на криво.ли«ейных уч.астках, а также ао зыщения производительности, при.водные рол.ики смонтированы на рычагах так, что плоскость, в которой ОНИ расположены, параллельна верхней грани головок направляющих, а рычаги установлены перпендикулярно боковым граням головок нап.рзвляющих, причем налравляющие выполнены с замыканием 1ПО концам трассы посредством переходных .криволинейных участков.
Источник информации, принятый во внимание щи экспертизе:
1. Авторское свидетааьство СССР N° 536109, кл. В 66 В 9/02, 08.12.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортная система | 1988 |
|
SU1562275A1 |
| Подъемная установка | 1978 |
|
SU779233A1 |
| Клетьевой подъемник | 1982 |
|
SU1063760A1 |
| Подъемно-транспортная система | 1987 |
|
SU1446079A1 |
| Бесканатный лифт | 1974 |
|
SU536109A1 |
| Самоходная тележка | 1978 |
|
SU749726A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| КАРЕТКА ЛЕСТНИЧНОГО ПОДВЕСНОГО ПОДЪЕМНИКА (ВАРИАНТЫ) | 2022 |
|
RU2791350C1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| Устройство для сборки,вальцовки и сварки кузовов шахтных вагонеток | 1985 |
|
SU1306676A1 |