Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты от перегрузок и повреждения грузоподъемных машин, в частности стреловых грузоподъемных кранов с телескопической стрелой.
Известно устройство безопасности крана стрелового типа, содержащее датчики длины и угла наклона стрелы, угла поворота платформы, высоты подъема крюка и напряженности электромагнитного поля и блок управления, обеспечивающие защиту крана от столкновений с препятствиями, в том числе линиями электропередач (см. патент РФ №2070162, В66С 23/90, 10.12.1996). Недостатком этого устройства, реализующего защиту крана по положению кранового оборудования, является сложность передачи сигнала на подвижную (выдвижную) секцию стрелы. Еще большие трудности для обеспечения надежной защиты возникают на грузоподъемных машинах со сменным оборудованием, на котором располагается ряд блоков (в основном датчиков), входящих в состав устройства.
Известна также система безопасности грузоподъемного крана с телескопической стрелой, содержащая отдельные модули системы безопасности, представляющие собой электронные блоки и датчики, расположенные на невыдвигаемой и выдвигаемой секциях стрелы, соединенные между собой через кабельный барабан (см. патент РФ №2232709, В66С 13/18, 23/88, 20.07.2004). Применение в данной системе мультиплексной линии связи для обмена информацией между отдельными модулями системы позволяет значительно уменьшить количество соединительных проводов между модулями системы и повысить надежность системы в целом. Однако для передачи сигналов между блоками, находящимися на невыдвигаемой и выдвигаемой частях конструкции, все равно требуется применение вращающихся токосъемных устройств и специальных кабелей, что не позволяет устранить полностью отказы из-за потери контакта в токосъемных устройствах и необходимости применения дорогостоящих материалов.
Наиболее близкой к заявляемому изобретению по совокупности существенных признаков является система безопасности грузоподъемной машины, содержащая первую группу средств контроля и управления, установленных на опорной конструкции или на недемонтируемых частях оборудования, включающую в себя цифровой блок обработки данных, к выходу которого подключены блоки исполнительных и сигнальных устройств, первый блок ввода-вывода информации, соединенный с цифровым блоком обработки данных двухсторонним каналом обмена данных, датчики параметров крана и блок питания, одна клемма которого соединена с корпусом грузоподъемной машины, а другая клемма - с шиной питания системы, и вторую группу средств контроля и управления, установленных на подвижной конструкции или сменном (демонтируемом) оборудовании, включающую в себя датчики параметров крана, и проводную линию связи между указанными группами (см. патент на полезную модель №38747, В66С 23/90, 05.04.2004). В известной системе связь между группами средств контроля и управления осуществляется с помощью мультиплексного канала обмена данных, соединяющего информационный вход цифрового блока обработки данных со вторым блоком датчиков параметров крана, установленным на выдвигаемой секции стрелы. Применение в данной системе мультиплексного канала обмена данных также сокращает количество электрических связей между блоками системы. Однако данная система безопасности обладает теми же недостатками, что и описанная выше.
Задачей, на решение которой направлено заявленное изобретение, является разработка системы безопасности грузоподъемной машины, которая бы обеспечивала повышенную надежность передачи команд на приборы, устанавливаемые на подвижных или сменных частях оборудования, и приема от них информационных сигналов без применения дорогостоящих кабелей и токосъемников.
Поставленные технические задачи достигаются тем, что в системе безопасности грузоподъемной машины, содержащей первую группу средств контроля и управления, установленных на опорной конструкции или на недемонтируемых частях оборудования, включающую в себя цифровой блок обработки данных, к выходу которого подключены блоки исполнительных и сигнальных устройств, первый блок ввода-вывода информации, соединенный с цифровым блоком обработки данных двухсторонним каналом обмена данных, датчики параметров крана и блок питания, одна клемма которого соединена с корпусом грузоподъемной машины, а другая клемма - с шиной питания системы, вторую группу средств контроля и управления, установленных на подвижной конструкции или сменном (демонтируемом) оборудовании, включающую в себя датчики параметров крана, и линию связи между указанными группами, согласно изобретению первая и вторая группы средств контроля и управления связаны между собой с помощью двухсторонней радиолинии, при этом первая группа оснащена первой приемопередающей радиостанцией, а вторая группа оснащена вторым блоком ввода-вывода информации, второй приемо-передающей радиостанцией, автономным источником питания и коммутатором, в первой группе вход передатчика и выход приемника первой радиостанции подключены соответственно к трансляционному выходу и трансляционному входу первого блока ввода-вывода информации, к информационному входу которого подключены датчики параметров крана, а во второй группе вход передатчика и выход приемника второй радиостанции подключены соответственно к трансляционному выходу и трансляционному входу второго блока ввода-вывода информации, к информационному входу которого подключен выход второго блока датчиков параметров крана, выходы автономного источника питания подключены к шинам питания второго блока ввода-вывода информации, приемника второй радиостанции и коммутатора, один из выходов коммутатора подключен к шине питания передатчика второй радиостанции, а другие выходы коммутатора подключены к управляющим входам второго блока датчиков параметров крана.
Оснащение системы безопасности приемо-передающими радиостанциями и автономным источником питания обеспечивает беспроводную, двухстороннюю связь между группой средств контроля и управления, установленных на опорной конструкции грузоподъемной машины, например платформе крана, или на недемонтируемых частях оборудования, и группой средств, установленных на подвижной конструкции, например выдвигаемой секции стрелы, или сменном (демонтируемом) оборудовании, что повышает надежность данной системы и упрощает ее монтаж на грузоподъемной машине, а оснащение системы коммутатором и вторым блоком ввода-вывода информации увеличивает срок работы автономного источника электропитания и сокращает затраты на обслуживание системы безопасности, так как автономный источник питания постоянно подключен только к приемнику второй радиостанции и второму блоку ввода-вывода информации, а питание на второй передатчик поступает только по команде на переключение коммутатора в виде кодовой последовательности импульсов, поступающей от цифрового блока обработки данных.
На чертеже представлена функциональная схема предлагаемой системы безопасности грузоподъемной машины.
Система безопасности грузоподъемной машины, в частности грузоподъемного крана стрелового типа с телескопической стрелой, содержит первую группу средств контроля и управления, установленных на платформе крана, и вторую группу средств контроля и управления, установленных на выдвигаемой секции стрелы.
В первую группу средств контроля и управления, установленных на платформе крана, входят блок 1 питания, цифровой блок 2 обработки данных, первый блок 3 ввода-вывода информации, блок 4 исполнительных устройств, блок 5 сигнальных устройств, группа датчиков 6 параметров крана и первая приемо-передающая радиостанция, включающая в себя первый передатчик 7, первый антенный блок 8 и первый приемник 9.
Во вторую группу средств контроля и управления, установленных на выдвигаемой секции стрелы, входят вторая группа датчиков 10 параметров крана, второй блок 11 ввода-вывода информации, вторая приемо-передающая радиостанция, включающая второй передатчик 12, второй антенный блок 13 и второй приемник 14, автономный источник питания 15 и коммутатор 16.
В первой группе средств контроля и управления первый блок 3 ввода-вывода информации соединен двухсторонним каналом обмена данных с цифровым блоком 2 обработки данных, к выходам которого подключены входы блока 4 исполнительных устройств и блока 5 сигнальных устройств. Вход первого передатчика 7 первой радиостанции подключен к трансляционному выходу первого блока 3 ввода-вывода информации, а выход - к входу первого антенного блока 8. Вход первого приемника 9 первой радиостанции подключен к выходу первого антенного блока 8, а выход - к трансляционному входу первого блока 3 ввода-вывода информации, к информационному входу которого подключены выходы датчиков 6 параметров крана. Одна клемма блока 1 питания соединена с корпусом крана, а другая - с шиной питания системы.
Во второй группе средств контроля и управления вход второго приемника 14 второй радиостанции подключен к выходу второго антенного блока 13, а выход - к трансляционному входу второго блока 11 ввода-вывода информации, к информационному входу которого подключены выходы датчиков 10 параметров крана. Вход второго передатчика 12 второй радиостанции подключен к трансляционному выходу второго блока 11 ввода-вывода информации, а выход - к входу второго антенного блока 13.
Для обеспечения работы второй группы средств контроля и управления система снабжена автономным источником 15 питания в виде батареи или аккумулятора. Выходы автономного источника питания подключены к шинам питания второго блока 11 ввода-вывода информации, второго приемника 14 и коммутатора 16. Один из выходов коммутатора подключен к шине питания второго передатчика 12 второй радиостанции, а другие выходы коммутатора подключены к управляющим входам датчиков 10 параметров крана. Это позволяет минимизировать потребление энергии, так как автономный источник питания постоянно подключен только ко второму приемнику 14 и блоку 11 ввода-вывода информации. Управляющими входами датчиков 10 параметров крана могут быть индивидуальные шины питания или специальные входы подключения датчиков.
В предлагаемой системе блоки выполнены следующим образом.
Цифровой блок 2 обработки данных представляет собой PIC-процессор со стандартным набором элементов, включающим аналого-цифровой преобразователь (АЦП), мультиплексор, оперативное запоминающее устройство (ОЗУ), программируемое постоянное запоминающее устройство (ППЗУ), параллельные и последовательные порты.
Блоки 3 и 11 ввода-вывода информации являются средствами для приема, преобразования информации датчиков параметров крана и передачи информации в последовательном коде.
Антенные блоки 8 и 13 могут содержать усилители и представляют собой активные антенны. Приемо-передающая радиостанция может быть выполнена в виде радиомодуля, представляющего собой FSK трансивер (например, интегральный однокристальный приемопередатчик ХЕ1205), обеспечивающий двунаправленную полудуплексную связь с возможностью быстрой перестройки частоты и NRZ кодирование.
Коммутатор 16 представляет собой сдвиговый регистр.
Датчики параметров крана содержат в своем составе датчик длины стрелы, датчик угла наклона стрелы, датчик усилия (или давления) в механизме подъема стрелы, датчик угла поворота платформы, датчик высоты подъема крюка и т.д. Датчики могут быть как аналоговые, так и цифровые. При использовании аналоговых датчиков они подключаются к аналого-цифровым преобразователям.
Система работает следующим образом.
Цифровой блок 2 обработки данных производит опрос датчиков 6, фиксируя их показания в ОЗУ, после чего через блок 3 ввода-вывода информации посылает кодовую последовательность импульсов в передатчик 7, модулируя электрические колебания, излучаемые первым антенным блоком 8.
Электромагнитные колебания, излучаемые первым антенным блоком 8, принимаются вторым антенным блоком 13, в результате чего вторым приемником 14 выделяется посланная последовательность импульсов, которая вторым блоком 11 ввода-вывода информации дешифрируется как команда на переключение коммутатора 16, подключение второго передатчика 12 и определенного датчика 10, приема информации датчика вторым блоком 11 ввода-вывода информации и передачи вторым передатчиком 12 и вторым антенным блоком 13 этой информации по радиолинии связи в первый антенный блок 8 и далее в ОЗУ цифрового блока 2 обработки данных.
Далее следуют подобные однотипные операции по опросу остальных датчиков 10, после чего на время опроса датчиков 6 и обработки информации датчики 10 и второй передатчик 12 переходят в режим ожидания (отключения потребления энергии).
Предлагаемая система безопасности грузоподъемной машины может быть изготовлена промышленным способом на приборостроительном предприятии с использованием современных электронных компонентов и технологий. Для реализации цифрового вычислителя можно использовать микропроцессор MSP430F149 фирмы «Texas Instruments" (США) или другие микропроцессоры подобного типа. В качестве датчиков для регистрации параметров крана может быть использована серийно выпускаемая продукция Арзамасского приборостроительного завода, например аналоговые датчики перемещений ЛГФИ. 401221.004, ЛГФИ. 401221.006, ЛГФИ. 401221.008 и их исполнения, или новые разработки цифровых датчиков, в частности датчик усилия цифровой ДУЦ ЛГФИ. 404176.013, и аналогичная аппаратура других приборостроительных заводов.
Специалисту в данной области техники должно быть очевидным, что в настоящем изобретении возможны разнообразные модификации и изменения. Соответственно, предполагается, что настоящее изобретение охватывает указанные модификации и изменения, а также их эквиваленты без отступления от сущности и объема изобретения, раскрытого в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный комплекс видео трансляции | 2015 |
|
RU2621058C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ПЕРЕДАЧИ РЕЧИ И ПОРТАТИВНАЯ РАДИОСТАНЦИЯ-ШЛЮЗ МАЛОЙ МОЩНОСТИ | 2024 |
|
RU2840298C1 |
| СИСТЕМА ПРИЕМА И ПЕРЕДАЧИ ИНФОРМАЦИИ | 1992 |
|
RU2012142C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2276094C2 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| МОДУЛЬ ПЛАНИРОВАНИЯ | 2009 |
|
RU2415456C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| ПОДВИЖНЫЙ КОМПЛЕКС СРЕДСТВ СВЯЗИ | 2011 |
|
RU2477024C1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2012 |
|
RU2513878C2 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты от перегрузок и повреждения грузоподъемных машин. Система содержит первую группу средств контроля и управления, установленных на опорной конструкции или на не демонтируемых частях оборудования, включающую в себя цифровой блок обработки данных (2), к выходу которого подключены блоки исполнительных и сигнальных устройств (4 и 5), первый блок ввода-вывода информации (3), соединенный с цифровым блоком обработки данных двухсторонним каналом обмена данных, датчики параметров крана (6) и блок питания (1), одна клемма которого соединена с корпусом грузоподъемной машины, а другая клемма - с шиной питания системы. Вторая группа средств контроля и управления установлена на подвижной конструкции или демонтируемом оборудовании и включает в себя датчики параметров крана (10). Группы средств контроля и управления связаны между собой с помощью двухсторонней радиолинии. Первая группа оснащена первой приемо-передающей радиостанцией, а вторая группа оснащена вторым блоком ввода-вывода информации (11), второй приемо-передающей радиостанцией, автономным источником питания (15) и коммутатором (16). Изобретение позволяет повысить надежность системы безопасности и упростить ее монтаж на грузоподъемной машине. 1 ил.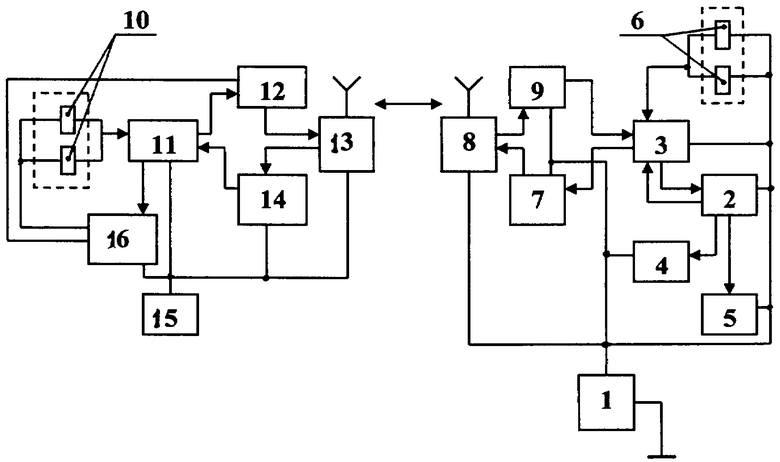
Система безопасности грузоподъемной машины, содержащая первую группу средств контроля и управления, установленных на опорной конструкции или на не демонтируемых частях оборудования, включающую в себя цифровой блок обработки данных, к выходу которого подключены блоки исполнительных и сигнальных устройств, первый блок ввода-вывода информации, соединенный с цифровым блоком обработки данных двухсторонним каналом обмена данных, датчики параметров крана и блок питания, одна клемма которого соединена с корпусом грузоподъемной машины, а другая клемма - с шиной питания системы, вторую группу средств контроля и управления, установленных на подвижной конструкции или демонтируемом оборудовании, включающую в себя датчики параметров крана, и линию связи между указанными группами, отличающаяся тем, что первая и вторая группы средств контроля и управления связаны между собой с помощью двусторонней радиолинии, при этом первая группа оснащена первой приемо-передающей радиостанцией, а вторая группа оснащена вторым блоком ввода-вывода информации, второй приемо-передающей радиостанцией, автономным источником питания и коммутатором, в первой группе вход передатчика и выход приемника первой радиостанции подключены соответственно к трансляционному выходу и трансляционному входу первого блока ввода-вывода информации, к информационному входу которого подключены датчики параметров крана, а во второй группе вход передатчика и выход приемника второй радиостанции подключены соответственно к трансляционному выходу и трансляционному входу второго блока ввода-вывода информации, к информационному входу которого подключен выход второго блока датчиков параметров крана, выходы автономного источника питания подключены к шинам питания второго блока ввода-вывода информации, приемника второй радиостанции и коммутатора, один из выходов коммутатора подключен к шине питания передатчика второй радиостанции, а другие выходы коммутатора подключены к управляющим входам второго блока датчиков параметров крана.
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |
| RU 2004138353 А, 20.05.2005 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ СВЯЗУЮЩЕГО ВЕЩЕСТВА ДЛЯ ШИШЕЛЬНЫХ ЗЕМЕЛЬ | 1934 |
|
SU38747A1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232709C2 |
| US 5730305 A, 24.03.1998. | |||

