Изобретение относится к машиностроению и может быть использовано в системах управления и защиты от перегрузок, повреждений и от опасного приближения к линии электропередачи грузоподъемных кранов.
Известен способ управления системой безопасности грузоподъемного крана путем одновременного измерения аналоговых и дискретных параметров, несущих информацию о режимах и условиях работы крана, а также одновременной параллельной передачи и одновременного приема этих сигналов с последующим определением на основании принятых сигналов фактической загрузки крана и фактического положения грузоподъемного оборудования с формированием соответствующих сигналов блокирования опасных перемещений механизмов крана [1, 2].
Ограничитель нагрузки грузоподъемного крана, реализующий известный способ, содержит электронный блок с элементами индикации, к которому при помощи отдельных проводов, непосредственно или через кабельный барабан, подключены аналоговые и дискретные датчики, расположенные на оголовке стрелы (датчик приближения к линии электропередач (ЛЭП) и концевой выключатель предельной высоты подъема грузозахватного органа) [1].
В известном способе и реализующем его ограничителе нагрузки датчики аналоговых параметров формируют аналоговые сигналы, которые при помощи отдельных проводов подключаются к электронному блоку. Электронный блок осуществляет одновременный прием информации от аналоговых и дискретных датчиков, вычисляет степень загрузки крана по грузовому моменту, контролирует приближение стрелы к ЛЭП и, в зависимости от степени загрузки крана по грузовому моменту и напряженности электрического поля ЛЭП, формирует выходные сигналы, которые через исполнительный блок осуществляют блокирование управления исполнительными механизмами крана, обеспечивая его защиту от перегрузки, координатную защиту и защиту от опасного приближения к ЛЭП.
Одновременный параллельный обмен информацией между электронным блоком и датчиками приводит к значительному увеличению числа электрических линий связи.
Подключение датчиков, расположенных на оголовке телескопической стрелы, осуществляется через кабельный барабан. Поэтому увеличение линий связи приводит к значительному усложнению кабельного барабана. Соответственно, сложность технической реализации многопроводного кабельного барабана приводит к ограничению максимально возможного числа подключаемых нагрузок и датчиков оголовка стрелы и, соответственно, снижает функциональные возможности системы безопасности. В частности, по причине ограниченности линий связи в кабельном барабане габаритный фонарь включается параллельно цепи питания датчика приближения к ЛЭП, что приводит к неполной реализации функций габаритного фонаря, а также к вынужденной подаче напряжения питания на всю систему безопасности в транспортном положении стрелы.
Известен также способ управления системой безопасности грузоподъемного крана путем распределения сообщений между его составными частями на основе CAN протокола [3]. Устройство для реализации известного способа - компьютерная система безопасности Liccon фирмы Liebherr, построенная с использованием кабелей-шин CAN-Bus [3].
В системе безопасности с шиной CAN устанавливаются связанные между собой контроллеры, в том числе контроллер оголовка стрелы. При этом применение двухпроводной линии обмена информацией между контроллерами системы безопасности грузоподъемного крана (линий К и L) вместо множества отдельных проводов позволяет взаимодействовать с любым числом датчиков и нагрузок при небольшом количестве линий связи, что обеспечивает повышение надежности системы безопасности крана.
Однако одной из наиболее значимых особенностей протокола CAN являются сложные механизмы обнаружения и ограничения ошибок, а также необходимость применения высокостабильных тактовых генераторов. Это приводит к необходимости реализации сложных модулей системы.
Более распространенным является способ управления системой безопасности грузоподъемного крана с использованием последовательного обмена информацией между ее отдельными контроллерами путем формирования в ведущем модуле тактового сигнала синхронизации, формирования в передающем модуле сигнала обмена данными и последующего приема этих сигналов в приемном модуле, а также последовательного считывания передаваемых данных в моменты изменения уровня тактового сигнала [4, 5].
Система безопасности, реализующая известный способ, содержит контроллеры, соединенные между собой при помощи шины, содержащей линию питания и две сигнальных линии, первая из которых предназначена для передачи тактового сигнала, а вторая - для обмена данными [4, 5].
Передача информации и синхронизирующих импульсов по двум отдельным проводам, по сравнению с системами безопасности с параллельной передачей информации, позволяет уменьшить количество используемых линий связи и получить более высокую надежность системы безопасности без применения сложных модулей, построенных на основе CAN протокола.
Однако раздельная передача информации и синхронизирующих импульсов не позволяет достичь предельно возможного сокращения линий связи (проводов) и максимально возможной надежности системы безопасности крана. Это приводит к необходимости применения кабельного барабана с 3-мя проводами для передачи информации и напряжения питания для связи с модулем, устанавливаемым в оголовке стрелы, что ограничивает его применения на кранах с повышенной длиной телескопической стрелы.
Наиболее близким к предложенному является способ управления системой безопасности грузоподъемного крана путем измерения при помощи датчика приближения к ЛЭП и концевого выключателя предельного подъема грузозахватного органа аналогового и дискретного параметра, преобразования их и передачи преобразованного аналогового сигнала по линии связи в виде частотно-импульсного или широтно-импульсного сигнала от контроллера оголовка стрелы ко второму контроллеру, расположенному за пределами выдвигаемой секции стрелы, а также передачи по указанной линии связи напряжения питания на контроллер оголовка стрелы и разделения передачи напряжения питания и сигнала в линии связи по амплитуде передаваемого сигнала [6].
Устройство для осуществления этого способа и наиболее близкое к предложенному содержит аналоговый и дискретный датчики оголовка стрелы (антенну датчика ЛЭП и концевой выключатель предельного подъема грузозахватного органа), подключенные к информационным входам контроллера оголовка стрелы, имеющего выводы линии связи и цепи концевого выключателя, которые соединены с одноименными выводами другого контроллера системы безопасности, причем напряжение питания контроллера оголовка стрелы подключено к линии связи через дроссель [6].
Недостатком известного технического решения является однонаправленность линии связи. Это исключает возможность управления габаритным фонарем и фарой оголовка стрелы и, соответственно, значительно снижает функциональные возможности системы безопасности.
Кроме того, линия связи в предложенном техническом решении может быть использована для передачи сигналов только от одного аналогового датчика. Поэтому при использовании "массы" в качестве общего провода кабельный барабан содержит минимум две цепи (линия связи и цепь концевого выключателя), что не позволяет обеспечить минимально возможное количество цепей в кабельном барабане. Соответственно, не достигается максимальная надежность и предельное упрощение конструкции кабельного барабана, а также не достигается реализация максимально возможного выдвижения стрелы из-за сложностей подмотки кабеля в барабане.
Задачей, на решение которой направлено предложенное техническое решение, является увеличение максимально возможного выдвижения стрелы и повышение надежности системы безопасности грузоподъемного крана за счет максимально возможного сокращения цепей (проводов) связи между отдельным составными частями системы безопасности, в том числе числа цепей в кабельном барабане, а также расширение функциональных возможностей системы безопасности за счет обеспечения возможности управления габаритным фонарем и фарой оголовка стрелы без увеличения числа цепей в кабельном барабане.
В предложенном способе управления системой безопасности грузоподъемного крана, содержащей контроллеры, путем измерения, по меньшей мере, одного аналогового и одного дискретного параметра, преобразования их и передачи сигнала преобразованного аналогового параметра по линии связи, по меньшей мере, от одного контроллера ко второму, передачи по указанной линии связи напряжения питания, по меньшей мере, на один контроллер и разделения передачи напряжения питания и сигнала в линии связи, поставленные технические задачи решаются за счет того, что упомянутая линия связи выполняется мультиплексной цифровой и по ней дополнительно передаются указанные сигналы, по меньшей мере, одного дискретного параметра. При этом указанное разделение передачи напряжения питания и сигнала в линии связи осуществляется, в частности, по времени.
Кроме того, для решения поставленных задач в предложенном способе с использованием указанных переданных параметров по априорно известным зависимостям, выявленным, например, при проектировании крана и предварительно записанным в энергонезависимую память контроллера системы безопасности, осуществляют вычисление фактической нагрузки крана и/или фактического положения его грузоподъемного оборудования, последующее сравнение фактической нагрузки крана с предельно-допустимой и/или фактического положения грузоподъемного оборудования с зоной допустимых положений, заданной, например, крановщиком при введении параметров координатной защиты, а также формирование и передачу по мультиплексной цифровой линии связи на соответствующий контроллер сигналов управления или блокировки включения исполнительных механизмов крана в зависимости от результатов этого сравнения. При этом дополнительно может осуществляться сравнение фактической напряженности поля ЛЭП с предельно-допустимой, а также формирование и передача указанных сигналов управления в зависимости от результатов этого сравнения.
Поставленные задачи решаются также за счет того, что дополнительно осуществляют управление габаритным фонарем или фарой оголовка стрелы путем подключения его (ее) к выходу контроллера оголовка стрелы, причем сигнал управления габаритным фонарем или фарой с органа управления, подключенного к управляющему входу соответствующего контроллера системы безопасности или входящего в его состав, по мультиплексной цифровой линии связи подают на контроллер оголовка стрелы для упомянутого управления габаритным фонарем или фарой.
В системе безопасности грузоподъемного крана, реализующей предложенный способ, содержащей контроллеры и, по меньшей мере, один аналоговый и один дискретный датчик, входящие в состав соответствующего контроллера или подключенные к информационным входам этого контроллера, в частности датчик приближения к ЛЭП и датчик предельного подъема грузозахватного органа, установленные на оголовке стрелы и подключенные к информационным входам контроллера оголовка стрелы, в котором между цепью питания и линией связи установлен блок развязки питающего напряжения и сигналов в линии связи, для решения поставленных задач линия связи между контроллерами выполняется мультиплексной цифровой, а, по меньшей мере, один контроллер, в частности контроллер оголовка стрелы, выполняется с возможностью передачи по мультиплексной цифровой линии связи преобразованных сигналов упомянутых датчиков.
Для решения поставленных задач вывод мультиплексной цифровой линии связи контроллера оголовка стрелы может быть подключен к первому выводу кабельного барабана, второй вывод которого при этом соединен с выводом мультиплексной цифровой линией связи контроллера, расположенного за пределами выдвигаемой секции телескопической стрелы грузоподъемного крана.
Кроме того, в предложенном устройстве технический результат достигается за счет того, что блоки развязки питающего напряжения и сигналов в мультиплексной цифровой линии связи выполнены в виде силового ключа и, по меньшей мере, одной диодно-конденсаторной цепи, причем вход и выход силового ключа, который устанавливается в контроллере, расположенном за пределами выдвигаемой секции стрелы, подключены соответственно к цепи питания системы безопасности и к мультиплексной цифровой линии связи, а указанный контроллер выполнен с возможностью управления силовым ключом, при этом диодно-конденсаторная цепь включена в цепь питания, по меньшей мере, в одном другом контроллере системы безопасности, в частности в контроллере оголовка стрелы, причем анод диода подключен к мультиплексной цифровой линии связи, катод диода подключен к первому выводу конденсатора и к выводу цепи питания контроллера, а второй вывод конденсатора соединен с общим проводом питания контроллеров системы безопасности. При этом между входом и выходом силового ключа блока развязки питающего напряжения и сигналов в мультиплексной цифровой линии связи может быть включен источник тока или резистор.
Как известно, одним из наиболее сложных узлов системы безопасности грузоподъемного крана является кабельный барабан, соединяющий выдвигаемую и невыдвигаемую секции телескопической стрелы и использующийся для измерения длины стрелы. При выдвижении стрелы происходит сматывание кабеля с барабана, осуществляется измерение угла поворота и числа оборотов кабельного барабана и по результатам этих измерений определяется длина стрелы. Для получения необходимой точности измерений необходимо исключить провисание кабеля. С этой целью кабельный барабан снабжается пружиной, обеспечивающей необходимое усилие подмотки (натяжения) кабеля. При увеличении числа проводов в кабеле и длины выдвижения стрелы происходит увеличение сложности технической реализации кабельного барабана. Кабельный барабан с многожильным кабелем свыше определенной длины технически нереализуем из-за ограниченных возможностей подматывающей пружины.
Уменьшение числа жил (проводов) в кабеле приводит к уменьшению веса кабеля и требуемого усилия подмотки. Поэтому при уменьшении числа проводов в кабеле кабельный барабан может работать с большей длиной кабеля.
С учетом изложенного отличительные признаки предложенного технического решения, обеспечивающие возможность уменьшения числа цепей в кабельном барабане до одного провода, обеспечивают достижение технического результата - увеличения максимально возможного выдвижения телескопической стрелы грузоподъемного крана.
Одновременно эти признаки обеспечивают возможность управления расположенными на оголовке стрелы нагрузками без увеличения числа цепей в кабельном барабане и, соответственно, приводят к расширению функциональных возможностей системы безопасности без усложнения кабельного барабана.
Кроме того, сокращение количества соединений (жгутов, проводов и линий связи) обеспечивает повышение надежности системы безопасности.
На фиг.1 - 3 приведены примеры функциональных схем устройств, реализующих предложенный способ управления системой безопасности грузоподъемного крана.
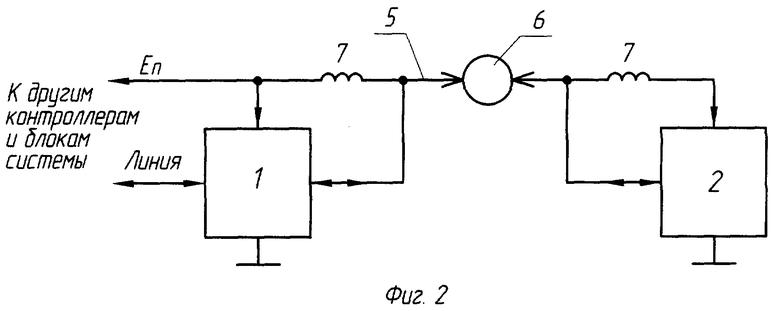
Система безопасности грузоподъемного крана, показанная в общем виде на фиг.1, содержит контроллеры 1-4, которые иначе могут называться модулями, блоками, датчиками и т.п., в том числе, например, ведущий контроллер 1 (блок индикации, блок обработки данных и т.п.), расположенный обычно в кабине крана контроллер оголовка стрелы 2, N контроллеров-датчиков 3 и исполнительный контроллер 4.
Все контроллеры объединены через общую цифровую однопроводную мультиплексную линию связи 5. При этом к контроллеру оголовка стрелы 2 эта линия 5 подключается через кабельный барабан 6, который выполняется однопроводным, если в качестве минусового провода питания контроллера 2 используется масса крана, и двухпроводным, если минус источника питания подается на этот контроллер через кабельный барабан 6.
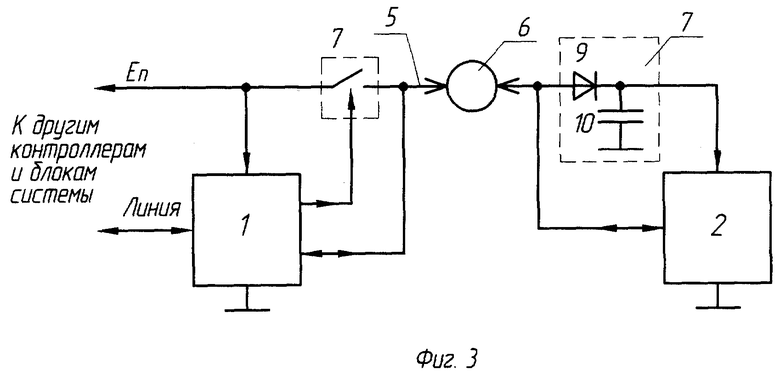
Питание контроллеров 1-3 от источника питания +Еп осуществляется по цифровой мультиплексной линии связи 5. При этом для развязки напряжения питания и сигналов в мультиплексной линии связи 5 контроллеры содержат блоки развязки 7, которые выполнены в виде дросселей (фиг.2) или в виде силового ключа 8 и диодно-конденсаторных цепей (см. фиг.1 и фиг.3, диоды 9, конденсаторы 10).
Напряжение питания на отдельные контроллеры, в частности на исполнительный контроллер 4, может подаваться не через цифровую мультиплексную линию связи 5, а непосредственно от источника питания +Еп (см. фиг.1).
Каждый контроллер 1-4 содержит микроконтроллер 11 и трансивер 12, содержащий ключ-передатчик 13 и приемник 14. Трансивер 12 обеспечивает согласование логических уровней микроконтроллера 11 и сигналов в цифровой мультиплексной линии связи 5 и может быть выполнен, например, на основе микросхем. Микроконтроллер 11 может осуществлять обмен информацией по цифровой мультиплексной линии 5 через трансиверы 12 с использованием, в частности, встроенных в него универсальных асинхронных приемопередатчиков (UART).
Для обеспечения работы передатчиков 13 с «открытым коллекторным выходом» в контроллер 1 введен источник тока 15, который для упрощения контроллера может быть заменен резистором.
В случае выполнения блоков развязки 7 питающего напряжения +Еп и сигналов в цифровой мультиплексной линии связи 5 в виде дросселей (см. фиг.2) трансиверы 12 выполняются в виде специализированных приемопередатчиков сигналов по силовым цепям.
В состав любого контроллера 1-4 могут входить выходные устройства 16 (например, электронные силовые ключи или электромагнитные реле), а также аналоговые или дискретные датчики 17. Сигналы с выходных устройств 16 системы безопасности поступают на различные нагрузки и исполнительные устройства крана, выполненные, например, электрогидравлическими. В частности, выходные устройства 16 контроллера оголовка стрелы 2 подключены к габаритному фонарю и к фаре крана, а выходные устройства 16 исполнительного контроллера 4 - к электромагнитным клапанам гидравлической системы крана (на фиг.1 условно не показано).
В системе безопасности устанавливаются аналоговые и дискретные датчики 17, количество, типы и параметры которых определяются конструкцией конкретного грузоподъемного крана и особенностями конструктивного исполнения системы безопасности. В частности, датчики длины стрелы и угла азимута выполняются обычно на основе потенциометров, подключенных к входам встроенных аналого-цифровых преобразователей соответствующих микроконтроллеров 11. Причем потенциометр датчика длины стрелы через согласующий редуктор связан с осью вращения кабельного барабана 6.
Датчик угла наклона стрелы может быть выполнен на основе акселерометра, подключенного к микроконтроллеру 11.
Датчики усилия или давления могут быть выполнены в виде тензометрических датчиков силы или тензометрических датчиков давления, установленных в штоковой и поршневой полостях гидроцилиндра подъема стрелы и подключенных к соответствующим микроконтроллерам 11, при необходимости через тензометрические усилители.
В контроллере оголовка стрелы 2 обычно используются датчики - концевой выключатель предельной высоты подъема грузозахватного органа (крюка) и датчик опасного приближения к ЛЭП.
Центральный (ведущий) контроллер 1 может содержать элементы индикации 18 (например, набор светодиодных и жидкокристаллических индикаторов и звуковой сигнализатор) и органы управления 19, выполненные, например, в виде набора кнопок и переключателей, использующихся для управления краном и прибором безопасности, в частности для задания параметров координатной защиты, выбора режимов стрелового оборудования, для управления габаритным фонарем и фарой оголовка стрелы и т.д.
Поясним суть предложенного способа на примере работы реализующего его устройства.
Для предельного сокращения линий связи и цепей в кабельном барабане 6 в устройствах, приведенных на фиг.1-3, напряжение питания контроллеров 1-3 и передача информационных сигналов между ними осуществляются по одному проводу - по цифровой мультиплексной линии связи 5.
В устройстве, показанном на фиг.2, осуществляется развязка сигналов мультиплексной линии связи 5 и напряжения питания +Еп при помощи дросселей. В этом случае импульсы с выводов мультиплексной линии связи контроллеров 1-3, работающих на передачу поочередно, в виде тока или напряжения передаются на мультиплексную линию связи 5 и кабельный барабан 6, осуществляя изменение напряжения в этой цепи. При этом другой контроллер системы безопасности фиксирует изменение напряжения в мультиплексной линии связи (и в цепи кабельного барабана 6), осуществляя прием информации. В итоге реализуется амплитудная модуляция сигнала в мультиплексной линии связи 5.
В устройствах, показанных на фиг.1 и фиг.3, осуществляется временное разделение передачи напряжения питания и сигналов в мультиплексной линии связи 5. В этом случае первоначально микроконтроллер 11 ведущего контроллера 1, работая по программе, заложенной в памяти этого микроконтроллера, осуществляет включение силового ключа 8 и напряжение питания +Еп (см. фиг.1) поступает на мультиплексную линию связи 5 и кабельный барабан 6. Это напряжение через диоды 9 поступает на цепи питания контроллеров 2, 3. Одновременно происходит заряд конденсаторов 10.
В следующий интервал времени микроконтроллер 11 ведущего контроллера 1 выключает ключ 8. Диоды 9 при этом запираются напряжениями заряженных конденсаторов 10, и мультиплексная линия связи 5 без каких-либо ограничений используется в качестве цифровой мультиплексной линии связи для передачи информации и сигналов управления. Во время этой передачи конденсаторы 10 поддерживают необходимые для контроллеров 2, 3 напряжения питания.
При обмене контроллеров информацией по мультиплексной линией связи 5 необходимый уровень сигнала в ней обеспечивается при помощи источника тока или резистора 15.
После окончания обмена информацией между контроллерами микроконтроллер 11 ведущего контроллера 1 вновь включает ключ 8, осуществляя подзарядку конденсаторов 9 через диоды 10, и далее процессы в устройстве повторяются.
Контроллеры 1-4, при наличии на них напряжения питания, при помощи датчиков 17 осуществляют измерение аналоговых и дискретных рабочих параметров, характеризующих нагрузку, положение грузоподъемного оборудования, условия и режимы работы грузоподъемного крана. В частности, контроллер 2, установленный на оголовке стрелы, при помощи датчиков 17 осуществляет контроль напряженности электрического поля ЛЭП у оголовка стрелы и предельную высоту подъема грузозахватного органа. Другие контроллеры 3 при помощи датчиков 17 осуществляют контроль нагрузки крана, например усилия в стреловом канате, угла наклона стрелы, угла азимута и т.д.
Ведущий контроллер 1 (или центральный блок) системы безопасности работает по записанной в памяти его микроконтроллера 11 программе, после отключения ключа 8 в последовательном коде по мультиплексной линии связи 5 поочередно формирует запросы на получение информации от каждого контроллера 2-4 путем замыкания мультиплексной линии связи на массу при помощи своего передатчика 13. Каждый запрос содержит адрес контроллера, с которым производится обмен информацией, команду и контрольную сумму.
Сигнал с мультиплексной линии связи 5 поступает одновременно на входы всех контроллеров 2-4. Все контроллеры через приемники 14 трансиверов 12 осуществляют прием информации с мультиплексной линии связи 5 и проверку контрольной суммы. Если контрольная сумма не совпадает, результат приема игнорируется и контроллер ожидает следующей передачи информации, которая циклически повторяется с целью обеспечения надежности системы безопасности при работе в условиях помех.
При совпадении контрольной суммы каждый контроллер 2-4 производит сравнение принятого адреса с собственным адресом и в случае их совпадения начинает передачу ответной информации путем замыкания мультиплексной линии связи на массу при помощи своего передатчика 13. В частности, контроллер оголовка стрелы 2 через мультиплексную линию связи 5 и кабельный барабан 6 передает в ведущий контроллер 1 информацию о состоянии датчиков оголовка стрелы 4 (напряженность поля ЛЭП, сигнал предельного подъема крюка и т.д.). При этом другие контроллеры 2-4, адреса которых не совпадают с переданным адресом, игнорируют принятую информацию и находятся в режиме ожидания обращения к ним. Благодаря этому в любой момент времени в режиме передачи находится только один контроллер и конфликта по загрузке мультиплексной линии связи не происходит.
После получения информации от контроллеров-датчиков 2-4 микроконтроллер 11 ведущего контроллера (центрального блока) 1 по априорно известным зависимостям, выявленным, например, при проектировании крана и предварительно записанным в энергонезависимую память контроллера 11, вычисляет фактическую нагрузку крана и фактическое положение его грузоподъемного оборудования. Допустимые режимы нагружения в виде грузовых характеристик крана хранятся в памяти микроконтроллера 11 центрального контроллера (блока) 1 (при необходимости - в дополнительном блоке энергонезависимой памяти). Зона допустимых положений грузоподъемного (стрелового) оборудования крана вводится крановщиком при задании параметров координатной защиты при помощи органов управления 19, расположенных на центральном контроллере 1, и сохраняется в памяти его микроконтроллера 11. В этой памяти хранятся также предельно-допустимые уровни напряженности электрического поля, контролируемые датчиком приближения оголовка стрелы к ЛЭП.
Микроконтроллер 11 ведущего (центрального) контроллера 1 осуществляет сравнение фактической нагрузки крана с предельно-допустимой, сравнение фактического положения грузоподъемного оборудования с зоной допустимых положений, а также сравнение фактической напряженности поля ЛЭП с предельно-допустимой. В зависимости от результатов этих сравнений микроконтроллер 11 по общей мультиплексной линии связи 5 передает в исполнительный контроллер 4 сигналы блокирования включения исполнительных механизмов крана. Исполнительный контроллер 4 через исполнительные устройства 16 подает соответствующие сигналы на исполнительные механизмы крана, осуществляя его автоматическую защиту от перегрузки по грузовому моменту, от столкновений стрелового оборудования с различными препятствиями (координатную защиту) и защиту от опасного приближения стрелы крана к ЛЭП.
Одновременно микроконтроллер 11 ведущего контроллера (центрального блока) 1 с помощью элементов индикации 18 осуществляет отображение основных рабочих параметров крана, а также формирование предупреждающих звуковых и световых сигналов для крановщика.
Кроме защиты крана, в системе осуществляется управление различными нагрузками, в частности габаритным фонарем и фарой оголовка стрелы. Для этого микроконтроллер 11 преобразует сигналы управления габаритным фонарем и фарой с органов управления 19 в соответствующие сигналы управления, которые передаются на контроллер оголовка стрелы 2 по мультиплексной линии связи с использованием адреса модуля, команды, контрольной суммы и т.д. Аналогичным образом осуществляется управление любыми другими нагрузками крана - звуковым сигналом, электромагнитом стопорения секций телескопической стрелы и т.д.
В итоге, в предложенном техническом решении обеспечивается расширение функциональных возможностей системы безопасности грузоподъемного крана за счет реализации управления различными нагрузками при одновременном уменьшении числа цепей в кабельном барабане до одной цепи. Это позволяет получить высокую надежность и возможность реализации систем безопасности грузоподъемных кранов с повышенной длиной телескопической стрелы.
Источники информации
1. Новые нормативные документы по безопасной эксплуатации подъемных сооружений: Вып.2 // Сост. В.С.Котельников, Н.А.Шишков, А.М.Горлин. - М.: ПИО ОБТ, 1999 - с.47-86.
2. Свидетельство на полезную модель RU 7097 U1 МПК 6, В 66 С 23/90 «Ограничитель нагрузки стрелового крана», 16.07.1998.
3. Успех благодаря применению новых идей в краностроении. Проспект фирмы Liebherr-Werk Ehingen Gmbh, Postfach 1361, 1999.
4. US 5730305, МПК 6 В 66 С 13/16, В 66 С 13/18, 24.03.1998.
5. RU 2096307 С1, МПК 6 В 66 С 13/46, 20.11.1997.
6. RU 2104245 С1, МПК 6 В 66 С 23/88, 10.02.1998
Изобретение относится к технике управления и защиты грузоподъемных кранов. Способ предусматривает измерение рабочих параметров грузоподъемного крана, преобразование и их передачу между контроллерами по общей мультиплексной цифровой линии связи вместе с сигналами управления и напряжением питания контроллеров. Разделение передачи напряжения питания и сигнала в мультиплексной цифровой линии связи осуществляют, в частности, по времени. С использованием передаваемых по цифровой мультиплексной линии рабочих параметров крана осуществляют вычисление фактической нагрузки крана, фактического положения его грузоподъемного оборудования и напряженности поля ЛЭП, их сравнение с предельно-допустимыми значениями, а также формирование и передачу по мультиплексной цифровой линии связи сигналов управления исполнительными механизмами крана в зависимости от результатов этих сравнений. При этом дополнительно осуществляют управление габаритным фонарем и фарой оголовка стрелы. Изобретение позволяет увеличить максимально возможное выдвижение стрелы и повысить надежность системы безопасности за счет сокращения числа линий связи между контроллерами, в том числе числа цепей в кабельном барабане, и обеспечить возможность управления габаритным фонарем и фарой оголовка стрелы без увеличения числа цепей в кабельном барабане. 2 н. и 7 з.п. ф-лы. 3 ил.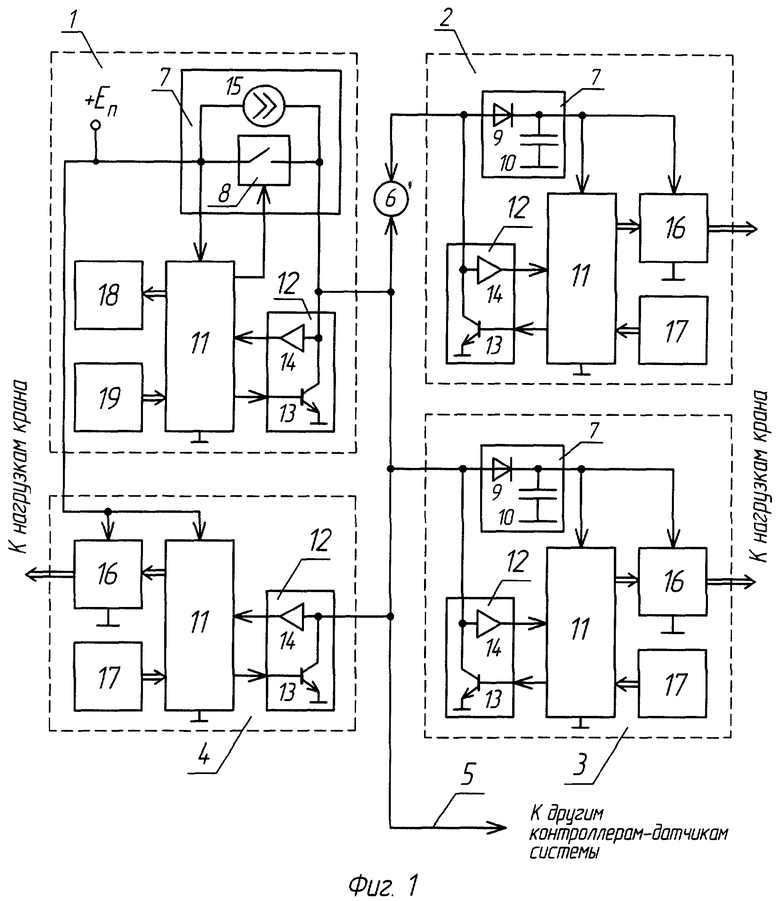
Приоритеты:
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПОДЪЕМНОГО КРАНА ОТ ОПАСНОГО НАПРЯЖЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 1997 |
|
RU2104245C1 |
| US 5730305 А, 24.03.1998 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОДЪЕМА КРЮКА СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2096307C1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2124447C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |
| УСТРОЙСТВО ДЛЯ МУЛЬТИПЛЕКСНОГО ОБМЕНА ИНФОРМАЦИЕЙ | 1991 |
|
RU2012045C1 |

