Изобретение относится к области машиностроения и может быть использовано в системах управления и защиты от перегрузок и повреждения стреловых грузоподъемных кранов с телескопической (гидравлической) или решетчатой стрелой.
Известен способ обмена информацией между отдельными модулями (блоками и датчиками) системы безопасности грузоподъемного крана путем одновременного формирования N аналоговых и М дискретных сигналов, несущих информацию о режимах работы крана, и Q дискретных сигналов блокировки исполнительных механизмов крана, а также одновременной параллельной передачи и одновременного приема этих M+N+Q сигналов в отдельных модулях этой системы [1, 2].
Устройство для осуществления известного способа содержит электронный блок с элементами индикации и органами управления, к которому по радиальной схеме (при помощи отдельных проводов) подключены N аналоговых датчиков (датчик угла наклона стрелы, датчик азимута, датчик длины стрелы крана и т.д.), М дискретных датчиков (концевые выключатели предельного подъема грузозахватного органа, барабана лебедки и т.д.), и исполнительный блок, подключенный к электронному блоку Q отдельными проводами [1, 2].
Датчики аналоговых параметров осуществляют измерение режимов работы крана (степени его нагружения, положения стрелового оборудования и т.д.) и осуществляют формирование аналоговых сигналов, которые при помощи отдельных проводов подключаются к электронному блоку. Дискретные датчики (концевые выключатели) при помощи отдельных проводов также подключаются к электронному блоку. Электронный блок осуществляет одновременный прием информации от N аналоговых и М дискретных датчиков, вычисляет степень загрузки крана по грузовому моменту и, в зависимости от степени загрузки крана по грузовому моменту и положения стрелового оборудования, одновременно с приемом информации от датчиков формирует Q выходных сигналов, которые через исполнительный блок осуществляют блокировку управления исполнительными механизмами крана, обеспечивая его защиту от перегрузки и повреждения.
В известном способе и реализующем его устройстве одновременный параллельный обмен информацией между отдельными модулями (датчиками и блоками) системы безопасности грузоподъемного крана обеспечивает высокую скорость передачи информации. Однако подключение каждого датчика и каждого сигнала исполнительного блока к электронному блоку отдельными проводами приводит к наличию большого количества электрических соединений и жгутов на кране, что приводит к снижению надежности и увеличению трудоемкости монтажа и ремонта системы безопасности на кране.
Известен также способ обмена информацией в системе безопасности грузоподъемного крана путем распределения сообщений между отдельными модулями этой системы на основе CAN протокола [3].
Устройство для реализации известного способа - компьютерная система безопасности Liccon кранов грузоподъемностью до 800 т серии LTM фирмы Liebherr, построенная с использованием кабелей-шин can-bus [3].
Как известно, CAN (controller area networks) - асинхронная последовательная шина с открытой структурой с эквивалентными (с точки зрения приема и передачи информации) модулями. CAN модули (узлы) представляют собой модули, осуществляющие процедуру приема-передачи данных и имеющие логику, обслуживающую ошибки. Физически кабели-шины CAN представляют цепи питания и двухпроводную линию обмена данными (линии К и L).
Применение двухпроводной линии обмена информацией между отдельными модулями системы безопасности грузоподъемного крана (линий К и L) вместо множества отдельных проводов позволяет значительно уменьшить количество проводов при одновременном повышении надежности и упрощении диагностики системы безопасности крана в целом.
Однако одной из наиболее значимых особенностей CAN-протокола являются очень сложные механизмы обнаружения и ограничения ошибок. Кроме того, при CAN-протоколе необходимо наличие кварцованного тактового генератора. Это приводит к необходимости реализации весьма сложных модулей системы. Именно по этой причине Протокол CAN не нашел широкого применения в системах безопасности грузоподъемных кранов и применяется фирмой Liebherr только на сверхтяжелых кранах, где сложность и стоимость системы безопасности не имеет принципиального значения.
Более распространенным и наиболее близким к предложенному является способ последовательного обмена информацией между отдельными модулями системы безопасности грузоподъемного крана путем формирования в ведущем модуле тактового сигнала синхронизации, формирования в передающем модуле сигнала обмена данными, последующего приема этих сигналов в приемном модуле, а также последовательного считывания передаваемых данных в моменты изменения уровня тактового сигнала синхронизации. Этот способ используется в системах безопасности грузоподъемного крана при обмене информацией между главным и индикаторными блоками [4, 5], а также при обмене информации между модулями, расположенными на невыдвигаемой и на выдвигаемой секциях стрелы [6].
Устройство для реализации известного способа содержит шину, подключенную к отдельным модулям (блокам и датчикам) системы безопасности грузоподъемного крана и содержащую две сигнальные линии, первая из которых предназначена для передачи тактового сигнала, а вторая - для обмена данными [4, 5, 6].
В частности, устройство содержит группу модулей (блоков и датчиков), устанавливаемых на невыдвигаемой секции стрелы, и связанную с ними через кабельный барабан группу модулей (блоков и датчиков), устанавливаемых на выдвигаемых секциях. В группу блоков на невыдвигаемой секции стрелы входят ограничитель нагрузки и блок защиты стрелы от недопустимых перемещений, подключенные к первому и второму входам блока исполнительных и сигнальных устройств; блок органов включения приборов, своими m выходами подключенный к m входам блока передачи команд и приема информации, t выходов которого подключены к (2+t)-м входам блока; (t+1)-й выход блока подключен к первому входу первого блока "ввода-вывода" информации, первый выход и второй вход которого соединен с барабаном, который через изоляторы установлен на невыдвигаемой секции стрелы; а второй выход блока подключен к (m+1)-му входу блока; с барабаном соединена также первая шина питания, подключенная к источнику питания. На барабане намотан трос, конец которого через изолятор закреплен на выдвигаемой секции стрелы. С тросом соединена вторая шина, питающая сигнализатор приближения к линии электропередачи (ЛЭП) и концевой выключатель (датчик) предельного положения крюка, которые выходами подключены к t-входам блока приема команд и передачи информации.
При этом реализация известного способа в этом устройстве приводит к необходимости применения кабельного барабана с 3-мя проводами: два провода используются в качестве сигнальных цепей для передачи информации между модулями системы защиты грузоподъемного крана и один провод - для передачи напряжения питания группы приборов (модулей), устанавливаемых на выдвигаемых секциях стрелы [6].
В этом устройстве блок ввода-вывода информации, входящий в группу модулей, устанавливаемых на невыдвигаемой секции стрелы, создает периодические посылки в последовательном импульсном коде, определяющие наличие передачи, номер команд и номер опрашиваемого модуля, формирует тактовые сигналы синхронизации, а также осуществляет прием информационных посылок, передаваемых модулем, установленным на выдвигаемой секции стрелы. Блок ограничения нагрузки и блок защиты стрелы от недопустимых перемещений с использованием принятой информации определяют степень загрузки крана по грузовому моменту, осуществляют контроль нахождения стрелового оборудования в разрешенной зоне и передают выходные сигналы на блок исполнительных и сигнальных устройств, осуществляя формирование сигналов индикации и управления исполнительными механизмами крана, обеспечивая его защиту от перегрузки и повреждения.
В известном способе и реализующем его устройстве, передача информации (данных) и синхронизирующих (командных) импульсов по двум отдельным проводам позволяет, по сравнению с системами безопасности с параллельной передачей информации [1, 2], значительно уменьшить количество используемых проводов (линий связи) и получить более высокую надежность системы безопасности без применения сложных модулей, построенных на основе CAN протокола.
Однако раздельная передача информации (данных) и синхронизирующих (командных) импульсов по двум отдельным проводам является недостатком известного технического решения, поскольку не позволяет достичь предельно возможного сокращения линий связи (проводов) и, соответственно, получить максимально возможную надежность системы безопасности крана. Кроме того, необходимость применения для передачи информации на выдвигаемую секцию стрелы двух сигналов приводит к увеличению количества проводов в кабельном барабане, что приводит к значительному усложнению этого барабана и уменьшению максимально возможного выдвижения стрелы из-за технической невозможности реализации многопроводного кабельного барабана с большой длиной кабеля.
Задачей, на решение которой направлено предложенное техническое решение, является повышение надежности системы безопасности грузоподъемного крана и увеличение максимально-возможного выдвижения его стрелы за счет максимально-возможного сокращения линий связи путем реализации последовательной асинхронной передачи и приема информации по однопроводной мультиплексной линии связи.
В предложенном способе обмена информацией между отдельными модулями (блоками и датчиками) системы безопасности грузоподъемного крана путем измерения рабочих параметров крана и положения его грузоподъемного оборудования, преобразования измеренных величин в цифровые сигналы, формирования цифровых сигналов управления механизмами крана, преобразования цифровых измерительных и управляющих сигналов в последовательный код и их передачи по линии связи с добавлением команд и номера (адреса) модуля, решение поставленной технической задачи достигается тем, что осуществляют двунаправленную передачу цифровых сигналов между отдельными модулями системы безопасности грузоподъемного крана по общей однопроводной линии связи, а при приеме последовательного кода производят контроль уровня сигнала в линии связи и осуществляют синхронизацию приема сигналов.
В устройстве для осуществления предложенного способа обмена информацией между отдельными модулями (электронными блоками и датчиками угла наклона и длины стрелы, усилия или давления, азимута и т.д.) системы безопасности грузоподъемного крана, расположенными на невыдвигаемой и на выдвигаемой секциях стрелы, соединенными между собой через кабельный барабан и содержащими информационно-измерительные или информационно-управляющие блоки, блоки формирования и блоки приема последовательных цифровых сигналов и блоки сопряжения этих сигналов с объединяющей эти модули линией связи, поставленная техническая задача решается путем объединения входов приема и выходов передачи цифровых сигналов в блоках сопряжения с линией связи в отдельных модулях системы безопасности, а также путем реализации блоков формирования и блоков приема последовательных цифровых сигналов в виде универсальных асинхронных приемопередатчиков.
Реализация системы безопасности грузоподъемного крана с указанными отличительными признаками обеспечивает возможность использовать однопроводную мультиплексную линию для связи между отдельными модулями системы и, благодаря этому, получить технический результат - повысить надежность системы и увеличить максимально-возможное выдвижение стрелы крана.
Известно, что кабельный барабан, соединяющий выдвигаемую и невыдвигаемую секции стрелы, в системах безопасности грузоподъемных кранов используется для измерения длины стрелы. При выдвижении (увеличении длины) стрелы происходит сматывание кабеля с барабана, осуществляется измерение угла поворота и числа оборотов кабельного барабана и по результатам этих измерений определяется длина стрелы. Для получения необходимой точности измерений необходимо исключить провисание кабеля. С этой целью кабельный барабан всегда снабжается пружиной часового типа, обеспечивающей необходимое усилие подмотки (натяжения) кабеля. При увеличении числа проводов в кабеле и длины выдвижения стрелы происходит значительное увеличение сложности технической реализации кабельного барабана. Кабельный барабан с многожильным кабелем свыше определенной длины технически нереализуем из-за ограниченных возможностей подматывающей пружины.
Уменьшение числа жил (проводов) в кабеле приводит к уменьшению веса кабеля и к соответствующему уменьшению требуемого усилия подмотки. Поэтому при уменьшении числа проводов в кабеле кабельный барабан может работать с большей длиной кабеля и, соответственно, увеличивается максимально-возможное выдвижение стрелы крана. С учетом изложенного, уменьшение числа линий связи в предложенном техническом решении придает системе безопасности грузоподъемного крана новое свойство - увеличение максимально-возможного выдвижения стрелы грузоподъемного крана.
Из других областей техники известно применение однопроводной мультиплексной линии для связей между пространственно разнесенными объектами. Известен, например, LIN-протокол, протокол MicroLAN фирмы Dallas Semiconductor и т.д. Однако эти протоколы не используются в системах безопасности грузоподъемных кранов и имеют свои специфические особенности, не позволяющие их эффективно использовать в этих системах.
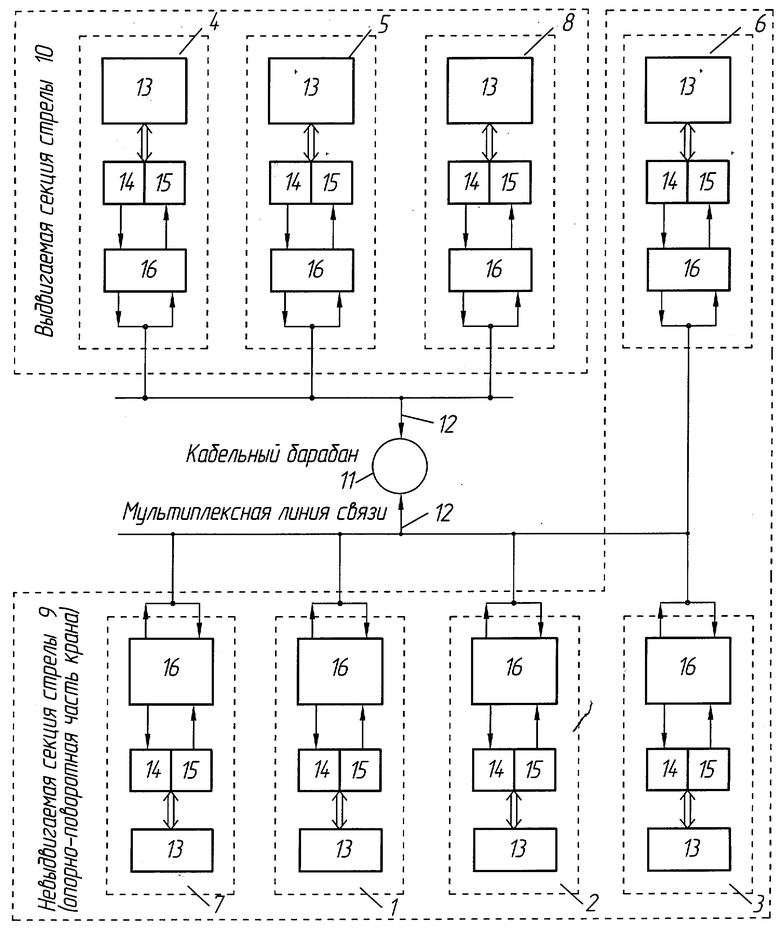
На чертеже представлена функциональная схема устройства, реализующего предложенный способ обмена информацией между модулями системы безопасности грузоподъемного крана.
Устройство содержит модули - электронные блоки и датчики, например, блок ограничения нагрузки 1, блок защиты стрелы от недопустимых перемещений 2 и блок исполнительных и сигнальных устройств 3, датчик угла наклона стрелы 4, датчик длины стрелы 5, датчик (датчики) усилия или давления 6, датчик азимута 7 и другие датчики 8, установка которых предусматривается конструкцией грузоподъемного крана и правилами его устройства и безопасной эксплуатации. Часть модулей расположена на невыдвигаемой секции стрелы 9 (или на опорно-поворотной части крана), а часть - на выдвигаемой 10 секции стрелы. Все модули (блоки, датчики) непосредственно или через кабельный барабан 11 объединены между собой при помощи общей однопроводной мультиплексной линии связи 12.
Каждый модуль 1-8 содержит информационно-измерительный или информационно-управляющий блок 13, блоки формирования 14 и блоки приема 15 последовательных цифровых сигналов и блоки сопряжения 16 этих сигналов с мультиплексной линией связи 12.
Информационно-измерительные и информационно-управляющие блоки 13 модулей 1-8 могут быть выполнены на микроконтроллере, например типа АТ89С51 фирмы Atmel. В блоках ограничения нагрузки 1 и защиты стрелы от недопустимых перемещений 2 к микроконтроллеру могут подключаться дополнительные блоки памяти, например типа 24С256. Блок исполнительных и сигнальных устройств 3 кроме микроконтроллера может содержать жидкокристаллический индикатор, например типа АС1601, подключенный непосредственно к микроконтроллеру, а также электромагнитные реле, подключенные к микроконтроллеру через буферные усилители, например типа К1109КТ23. Возможно также исполнение блока ограничения нагрузки 1, блока защиты стрелы от недопустимых перемещений 2 и блока исполнительных и сигнальных устройств 3 в виде единого электронного блока с использованием одного комплекта блоков обмена с линией связи 14, 15 и 16.
В модулях-датчиках длины стрелы 5 и азимута 7 могут быть использованы потенциометры, подключенные к микроконтроллеру через аналого-цифровые преобразователи. Причем потенциометр датчика длины стрелы 5 через согласующий редуктор связан с осью вращения кабельного барабана 11.
Модуль-датчик угла наклона стрелы 4 может быть выполнен на основе акселерометра типа ДЛУСДМ, подключенного к микроконтроллеру.
Модуль-датчик (датчики) усилия или давления 6 может быть выполнен в виде тензометрического датчика силы или тензометрических датчиков давления, установленных в штоковой и поршневой полостях гидроцилиндра подъема стрелы и подключенных к соответствующим микроконтроллерам через аналого-цифровые преобразователи.
В качестве дополнительных модулей-датчиков 8 в системе безопасности крана могут использоваться концевые выключатели предельной высоты подъема грузозахватного органа (крюка), датчик опасного приближения к линии электропередачи и т.д.
В качестве блоков формирования 14 и блоков приема 15 последовательных цифровых сигналов в модулях 1-8 могут использоваться универсальные асинхронные приемопередатчики микроконтроллеров (информационно-измерительных и информационно-управляющих блоков 13). В качестве блоков сопряжения 16 микроконтроллеров с мультиплексной линией связи 12 целесообразно использовать специализированные микросхемы приемопередатчиков, например типа TLE6258.
Модули 1-8 объединены через общую однопроводную мультиплексную линию связи 12, а модули, расположенные на невыдвигаемой 9 и на выдвигаемой 10 секциях стрелы - через кабельный барабан 11. Причем кабельный барабан 11 имеет две цепи: мультиплексную линию связи 12 и цепь для подачи напряжения питания на модули 4, 5 и 8, расположенные на выдвигаемой 10 секции стрелы. В качестве второго провода питания используются металлические конструкции стрелы (масса) грузоподъемного крана.
Поясним суть предложенного способа на примере работы реализующего его устройства.
Модули-датчики 1-8 осуществляют измерение рабочих параметров грузоподъемного крана и контроль положения его грузоподъемного (стрелового оборудования). Блок ограничения нагрузки 1 и блок защиты стрелы от недопустимых перемещений 2 работают по записанной в памяти микроконтроллера программе и при помощи блока формирования последовательных цифровых сигналов 14 и блока сопряжения 16 в последовательном коде по мультиплексной линии 12 связи поочередно формируют запрос на получение информации от каждого модуля-датчика 1-8. Каждый запрос содержит стартовый бит (преамбулу), адрес модуля-датчика 1-8, контрольную сумму и стоповый бит и передается в линию 12 с частотой F.
Сигнал с мультиплексной линии 12 через блоки сопряжения 16 одновременно поступает на входы блоков приема 15 последовательных цифровых сигналов всех модулей системы безопасности крана. Логическая схема каждого блока приема 14 в состоянии ожидания передачи производит контроль уровня сигнала в линии связи 12. Одна выборка логического нуля интерпретируется как спадающий фронт стартового бита, после чего запускается последовательность обнаружения стартового бита путем периодического контроля напряжения на мультиплексной линии связи 12 в соответствии со стандартной логикой работы асинхронного приемопередатчика микроконтроллера. Если стартовый бит обнаружен, то синхронизация приема сигналов считается установленной.
После установления синхронизации, блок приема 14 в каждом модуле осуществляет прием команд, данных и контрольной суммы, осуществляя контроль напряжения в мультиплексной линии с частотой F. При этом частота F и число бит передаваемой информации считаются априорно известными.
После окончания приема информации каждый модуль осуществляет проверку контрольной суммы. Если контрольная сумма не совпадает, результат приема игнорируется и модуль ожидает следующей передачи информации, которая циклически повторяется с целью обеспечения высокой надежности системы безопасности при работе в условиях помех.
При совпадении контрольной суммы, каждый модуль производит сравнение принятого адреса с собственным адресом и, в случае их совпадения, начинает передачу ответной информации. При этом другие модули, адреса которых не совпадают с переданным адресом, игнорируют принятую информацию и находятся в режиме ожидания обращения к ним. Благодаря этому, в любой момент времени в режиме передачи находится только один модуль системы и конфликта по загрузке мультиплексной линии связи 12 не происходит.
После получения информации от модулей-датчиков 1-8 блок ограничения нагрузки 1 и блок защиты стрелы от недопустимых перемещений 2 определяют текущую нагрузку крана и положение его грузоподъемного (стрелового) оборудования. Допустимые режимы нагружения в виде грузовых характеристик крана хранятся в памяти блока ограничения нагрузки 1. Зона допустимых значений положения грузоподъемного (стрелового) оборудования крана вводится при задании параметров координатной защиты при помощи органов управления, расположенных на блоке защиты стрелы от недопустимых перемещений 2 и сохраняется в его памяти. Блоки 1 и 2 осуществляют сравнение фактического нагружения крана с предельно-допустимым, а также сравнение фактического положения грузоподъемного оборудования с зоной допустимых положений, заданных при введении координатной защиты. В зависимости от результатов указанных сравнений, эти блоки по общей мультиплексной линии связи 12 передают в блок исполнительных и сигнальных устройств 3 сигналы индикации и сигналы блокировки включения исполнительных механизмов крана, осуществляя его автоматическую защиту от перегрузки по грузовому моменту и защиту от столкновений стрелового оборудования с различными препятствиями (координатную защиту).
В итоге, предложенное техническое решение обеспечивает эффективную реализацию всех функциональных характеристик системы безопасности грузоподъемного крана и позволяет получить высокую надежность и возможность реализации систем безопасности грузоподъемных кранов с повышенной длиной телескопируемой стрелы.
Источники информации
1. Свидетельство на полезную модель RU 7097 U1 МПК6, В 66 С 23/90, “Ограничитель нагрузки стрелового крана”, 1998.
2. Патент России №2011632 С1, МПК5 В 66 С 23/90, 1994.
3. Успех благодаря применению новых идей в краностроении. Проспект фирмы Liebherr-Werk Ehingen Gmbh, Postfach 1361, 1999.
4. Патент США №5730305, МПК6 В 66 С 13/16, В 66 С 13/18, 1998.
5. Патент России №2096307 С1, МПК6 В 66 С 13/46, 1997.
6. Заявка России №95111291 А1, МПК6 В 66 С 23/90, 1997.
Группа изобретений относится к области машиностроения и предназначена для использования в системах управления и защиты от перегрузок и повреждения стреловых грузоподъемных кранов с телескопической или решетчатой стрелой. Связь между отдельными модулями системы безопасности, расположенными на невыдвигаемой и выдвигаемой секциях стрелы и соединенными между собой через кабельный барабан, осуществляется по однопроводной двунаправленной мультиплексной линии связи. В отдельных модулях системы, содержащих информационно-измерительные или информационно-управляющие блоки, блоки формирования и блоки приема последовательных цифровых сигналов, а также блоки сопряжения этих сигналов с мультиплексной линией связи, производится объединение входов приема и выходов передачи цифровых сигналов, а блоки формирования и блоки приема последовательных цифровых сигналов выполняются в виде универсальных асинхронных приемопередатчиков. При приеме последовательных цифровых сигналов осуществляют контроль уровня сигнала в однопроводной линии связи и синхронизацию приема сигналов. Группа изобретений позволяет повысить надежность системы безопасности и увеличить максимально возможные выдвижения его стрелы. 2 н.п. ф-лы, 1 ил.
| US 5730305 А, 24.03.1998 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОДЪЕМА КРЮКА СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2096307C1 |
| RU 95111291 A1, 10.06.1997 | |||
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 1997 |
|
RU2129524C1 |

