Заявляемое изобретение относится к медицинской технике, в частности к устройствам для ориентирования слепых в окружающем пространстве, и может быть использовано при самостоятельном передвижении слепого в недетерминированной обстановке.
Известна ультразвуковая трость "UltraCane", материал о которой опубликован, например, в газете "Yorkshire Post" за 1 февраля 2005 г., раздел "Busiess week", статья "Sound idea offers help to the blind". Более подробная информация о трости "UltraCane" имеется в Интернете, на сайте www.soundforsight.co.uk. Трость "UltraCane" содержит ультразвуковой локатор, блок обработки информации и сигнализатор в виде вибродатчиков, вмонтированных в рукоятку трости. По мере приближения пользователя к препятствию виброимпульсы учащаются. Недостатком известной трости "UltraCane" является то, что индицируется только ближайшее из обнаруженных препятствий. Кроме того, в условиях загроможденной обстановки, например, в тесных помещениях, вибродатчик генерирует сигналы практически непрерывно, затрудняя различение действительно нужной на текущий момент информации.
Также известно ультразвуковое устройство для слепых «Miniguide», принятое в качестве ближайшего аналога, материал о котором опубликован, например:
- в статье J.Hill, J.Black «The Miniguide: A New Electronic Travel Device» // Journal of Visual Impairment & Blindness, v97, n10, pl-6, Oct 2003;
- в «Port Macquarie News», May 2003;
- в «Horizons Newsletter», Fall 2004;
- в материалах конференции Technology And Persons With Disabilities Conference 2004 (электронная версия - на сайте http://www.csun.edu/cod/conf/2004/proceedings/197.htm).
Более подробная информация о «Miniguide» имеется на сайте www.gdp-research.com.au.
«Miniguide» содержит ультразвуковой локатор, устройство обработки информации и сигнализаторы в виде источника звука и вибродатчиков. Пользователь держит устройство в руке. Ультразвуковой локатор измеряет расстояние до препятствий, сигнализатор вырабатывает тональные звуковые сигналы, частота которых зависит от измеренной дальности. Имеются также вмонтированные в прибор вибрационные датчики для альтернативного способа представления информации. «Miniguide» снабжен переключателем максимальной дальности обнаружения объектов с 5 диапазонами от 0.5 до 8 метров. Луч локатора имеет значительную угловую ширину, что повышает надежность обнаружения малогабаритных объектов. Для обнаружения узких свободных проходов (открытых дверей и т.д.) предусмотрены режимы пониженной чувствительности локатора, чтобы, когда луч локатора направлен в сплошную стену, эхо-сигнал обнаруживался бы, а при направлении луча по центру проема вероятность срабатывания локатора на эхо-сигналы от дверных косяков и т.д. была бы меньше.
Недостатком известного устройства «Miniguide» является то, что обнаружение открытых проемов является недостаточно надежным, так как зависит от отражающих свойств дверных косяков и т.д. Кроме того, при пониженной чувствительности резко падает дальность обнаружения объектов, и пространство не может быть исследовано на значительную глубину.
Задачей заявляемого изобретения является повышение осведомленности пользователя о геометрии окружающего пространства, в первую очередь, о глубине сцены, и облегчение обнаружения свободных проходов.
Указанная задача решается за счет того, что в устройстве обнаружения препятствий для инвалида по зрению, содержащем последовательно соединенные локатор, блок обработки информации и сигнализатор, а также переключатель предельной дальности обнаружения препятствий, выход которого соединен с первым входом управления блока обработки информации, дополнительно введен переключатель выбора индикации наиболее близкого или наиболее удаленного из обнаруженных препятствий, причем выход переключателя выбора индикации соединен со вторым входом управления блока обработки информации.
Может быть дополнительно введен переключатель количества одновременно индицируемых препятствий, выход которого соединен с третьим входом управления блока обработки информации.
Техническим результатом изобретения является повышение осведомленности пользователя о геометрии окружающего пространства, в первую очередь, о глубине сцены, благодаря чему пользователь может оценивать размеры свободного пространства в пределах зоны действия устройства, заранее корректировать направление своего движения, а также обнаруживать узкие свободные проходы (дверные проемы и т.д.).
Благодаря дополнительному введению переключателя количества одновременно индицируемых препятствий, появляется возможность выбора индикации одного препятствия или одновременной индикации двух или более расстояний.
На чертеже представлена структурная схема устройства.
Устройство обнаружения препятствий для инвалида по зрению содержит локатор 1 (ЛОК), блок 2 обработки информации (БОИ), сигнализатор 3 (СИГН), переключатель 4 предельной дальности обнаружения препятствий (ППДО), переключатель 5 выбора индикации наиболее близкого или наиболее удаленного из обнаруженных препятствий (ПВИ). Выход 6 ЛОК 1 соединен с входом 7 БОИ, выход 8 БОИ 2 соединен с входом 9 СИГН, выход 10 ППДО 4 соединен с входом 11 БОИ 2, выход 12 ПВИ 5 соединен с входом 13 БОИ 2. Конструктивно ЛОК 1 может быть выполнен в отдельном корпусе, например, в виде очков или в виде брошки, закрепляемой на груди пользователя, или же все элементы схемы могут располагаться в общем корпусе, оформленном в виде ручного фонарика. Анализ состояния ПВИ 5 и соответствующий выбор индицируемой дальности может производиться, например, при помощи контроллера, входящего в состав БОИ 2.
В устройство может быть дополнительно введен переключатель 14 количества одновременно индицируемых препятствий (ПКОП), выход 15 которого соединен с входом 16 БОИ 2. В случае применения СИГН 3 акустического типа одновременная индикация может осуществляться, например, посредством подачи на СИГН 3 наложенных друг на друга (или следующих непосредственно один за другим) звуковых сигналов различной тональности. При этом пользователь получает более полную информацию о распределении препятствий по ходу следования. Генерация тональных сигналов, подаваемых на вход 9 СИГН 3, может выполняться, например, программно при помощи контроллера, входящего в состав БОИ 2. В случае применения СИГН 3 вибрационного типа для одновременной индикации может применяться, например, кодирование в виде сдвоенных (строенных и т.д.) вибрационных импульсов, вырабатываемых единственным вибратором. В случае использования двух или более вибродатчиков, входящих в состав СИГН 3, виброимпульсы, соответствующие различным поддиапазонам расстояний, могут одновременно вырабатываться различными вибродатчиками, пространственно разнесенными между собой и расположенными, например, под разными пальцами руки, держащей устройство обнаружения препятствий.
В целом устройство функционирует следующим образом.
ЛОК 1 определяет расстояния до объектов, находящихся в зоне обзора устройства, с выхода 6 ЛОК 1 сигналы поступают на вход 7 БОИ 2, который управляет работой СИГН 3. СИГН 3 вырабатывает звуковые или вибрационные сигналы (в зависимости от применяемой конструкции СИГН 3), воспринимаемые пользователем и позволяющие ему судить о наличии препятствий в зоне обзора и о расстоянии до них. Сигнал с выхода 12 ПВИ 5, поступающий на вход 11 БОИ 2, определяет, какое из нескольких одновременно обнаруженных препятствий будет индицировать СИГН 3: наиболее близкое или наиболее удаленное. При этом у пользователя возникает возможность не только получать предупреждение об опасности столкновения, но и оценивать размеры свободного пространства в пределах зоны действия устройства, заранее корректировать направление своего движения, а также обнаруживать узкие свободные проходы (дверные проемы и т.д.).
При введении ПКОП 14 сигнал, поступающий с выхода 15 ПКОП 14 на вход 16 БОИ 2, определяет, какое количество из числа нескольких обнаруженных препятствий индицируется одновременно.
Техническим результатом изобретения является повышение осведомленности пользователя о геометрии окружающего пространства, в первую очередь, о глубине сцены, благодаря чему пользователь может оценивать размеры свободного пространства в пределах зоны действия устройства, заранее корректировать направление своего движения, а также обнаруживать узкие свободные проходы (дверные проемы и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРОСТЬ ДЛЯ ИНВАЛИДА ПО ЗРЕНИЮ | 2005 |
|
RU2280429C1 |
| Трость для инвалида по зрению | 2021 |
|
RU2768454C1 |
| ТРОСТЬ ДЛЯ ИНВАЛИДА ПО ЗРЕНИЮ | 2007 |
|
RU2352317C1 |
| Трехканальный ультразвуковой ассистивный помощник для инвалидов по зрению | 2024 |
|
RU2834837C1 |
| ЭЛЕКТРОННЫЙ ПОВОДЫРЬ ДЛЯ СЛЕПЫХ | 2006 |
|
RU2342108C2 |
| СПОСОБ ОРИЕНТАЦИИ, НАВИГАЦИИ И ИНФОРМАЦИИ В ПРОСТРАНСТВЕ ЛЮДЕЙ С НАРУШЕНИЕМ ЗРИТЕЛЬНЫХ ФУНКЦИЙ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2503436C1 |
| ТРОСТЬ ДЛЯ ИНВАЛИДА ПО ЗРЕНИЮ | 2011 |
|
RU2473324C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЯМИ МАНЕВРИРУЮЩИХ НА АЭРОДРОМЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2001 |
|
RU2192653C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТОВ С ПОМОЩЬЮ ПИКОСЕКУНДНЫХ ИМПУЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195688C2 |
| СПОСОБ АКУСТИЧЕСКОГО ПРЕДСТАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ИНФОРМАЦИИ ДЛЯ ПОЛЬЗОВАТЕЛЕЙ | 2012 |
|
RU2523340C2 |
Изобретение относится к медицинской технике, в частности к устройствам для ориентирования слепых в окружающем пространстве. Устройство обнаружения препятствий для инвалида по зрению содержит последовательно соединенные локатор, блок обработки информации и сигнализатор, а также переключатель предельной дальности обнаружения препятствий, выход которого соединен с первым входом управления блока обработки информации. Дополнительно введен переключатель выбора индикации наиболее близкого или наиболее удаленного из обнаруженных препятствий, причем выход переключателя выбора индикации соединен со вторым входом управления блока обработки информации. Использование изобретения позволяет повысить уровень информативности пользователя о геометрии окружающей среды. 1 з.п. ф-лы, 1 ил.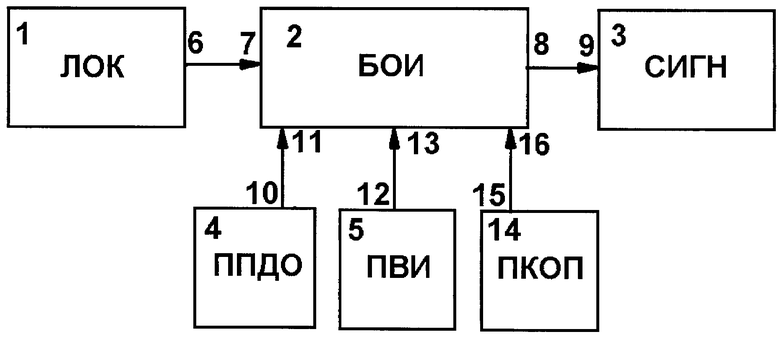
| W.M.PENROD et al | |||
| "A REVIEV AND COMPARISON OF ELECTRONIC TRAVEL DEVICES FOR THE BLIND", 2004 Conference Proceedings, www.csun.edu/cod/conf/2004/proceedings/197.htm | |||
| GDP Research, The Miniguide ultrasonic mobility aid, www.gdp-research.com.au | |||
| Ультразвуковой локатор для слепых | 1986 |
|
SU1313440A1 |
| Ультразвуковой локатор для слепых | 1982 |
|
SU1053829A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1998 |
|
RU2147701C1 |
| US 4991126 А, 05.02.1991 | |||
| JP 2001178765, 03.07.2001 | |||
| US 3546467 A, 08.12.1970. | |||

