Изобретение относится к области радиоизмерительной техники и может быть использовано при построении различных автоматизированных измерительных систем для измерения расстояния до исследуемых объектов в радиолокации, геофизике, радионавигации.
Известен способ измерения расстояния до объектов [1], заключающийся в зондировании (облучении) объекта электромагнитной энергией радиосигнала и последующей обработке отраженного от объекта радиосигнала. Способ [1] заключается в генерации сигнала, модуляции его с преобразованием в радиосигнал соответствующей частоты, усилении модулированного радиосигнала, излучении модулированного радиосигнала, зондировании исследуемого объекта сформированным радиосигналом, приеме отраженного сигнала, демодуляции с преобразованием отраженного сигнала к основной частоте (вблизи нулевой частоты), обработке демодулированного сигнала для получения измерительной информации об исследуемом объекте путем отсчета по индицируемым данным, данным, зафиксированным в виде твердой копии или на ПЭВМ.
Современный уровень позволяет при частоте несущей 94 ГГц обеспечить полосу частот 10 ГГц. При этом разрешение по времени составляет 0,2 нс, что соответствует разрешению по дальности 3 см, а шумовая температура равна 240 К.
Недостатками способа являются сравнительно низкая точность измерения расстояния и достаточно большая сложность самого процесса измерения.
Известно устройство измерения расстояния до объектов [2], которое включает в себя генератор непрерывных колебаний, первый выход которого соединен с входом усилителя мощности, второй вход которого соединен с выходом модулятора, а выход - с передающей антенной, приемная антенная соединена с первым входом приемника, обеспечивающего демодуляцию входного сигнала, второй вход приемника соединен с вторым выходом генератора, выход приемника соединен с входом индикатора, обеспечивающего обработку информации.
Недостатком устройства является сравнительно низкая точность измерения расстояния.
Известен способ [3], выбранный за прототип (способ видеоимпульсного измерения расстояния до объектов), заключающийся в генерировании последовательности широкополосных видеоимпульсов, излучении широкополосных видеоимпульсов, зондировании ими исследуемого объекта, приеме отраженного от объекта сигнала, масштабно-временном преобразовании принятого сигнала, квантовании преобразованного сигнала, запоминании квантованного сигнала, обработке запомненного сигнала для получения измерительной информации об исследуемом объекте путем отсчета по индицируемым данным, данным, зафиксированным в виде твердой копии или на ПЭВМ.
Способ (прототип) позволяет измерять дальность до значений не более 450-1500 м при разрешении по дальности порядка 1,5-2 см; шумовая температура 90 К, затухание практически отсутствует.
Недостатком способа [3] является низкая точность измерения расстояния, так как способ позволяет измерять расстояние до объектов только на малых дальностях действия.
Известно устройство [3] для измерения расстояния до объектов, выбранное за прототип. В устройстве первый выход генератора ступенчатой функции соединен с входом передающей антенны, выходы которой связаны: первый - с объектом, второй - со вторым входом приемной антенны, второй выход генератора ступенчатой функции соединен со вторым входом масштабно-временного преобразователя, третий выход которого соединен с первым входом процессора, первый вход приемной антенны связан с объектом, а выход - соединен с первым входом масштабно-временного преобразователя, первый выход которого соединен с входом фильтра нижних частот, а второй выход - с входом индикатора, выход фильтра нижних частот соединен с входом аналого-цифрового преобразователя, выход которого соединен с входом процессора, второй выход которого соединен с входами устройства отображения и ПЭВМ, выход которой соединен с входом устройства копирования.
Данное устройство имеет недостаток - низкую точность измерения расстояния до объектов. Это связано со следующим. Для того, чтобы измерить любой из параметров объекта, необходимо облучить его сигналом с достаточной энергией, при которой интенсивность отраженного сигнала превышала бы некоторый минимальный уровень, когда еще возможны прием и обработка отраженного сигнала. В данном случае энергия сигнала определяется энергией одного импульса Е1, величина которой ограничена сверху достаточно низким значением: Е1≈0,02 мДж, что снижает точность измерения параметров объекта, находящегося на неизвестном расстоянии. Кроме этого, увеличение мощности излучения связано с очень большими материальными затратами. Все это существенно ограничивает возможности применения этого устройства.
Техническим результатом изобретения является повышение точности измерения расстояния до объектов с помощью пикосекундных импульсов при высокой дальности.
Технический результат достигается тем, что в способе измерения расстояния до объектов с помощью пикосекундных импульсов, заключающемуся в генерировании последовательности видеоимпульсов и их излучении, зондировании ими исследуемого объекта, приеме отраженного от объекта сигнала, масштабно-временном преобразовании принятого отраженного сигнала, квантовании преобразованного сигнала, запоминании квантованного сигнала, обработке запомненного сигнала для получения измерительной информации об исследуемом объекте путем отсчета по индицируемым данным, данным, зафиксированных в виде твердой копии или на ПЭВМ, генерируют периодическую последовательность видеоимпульсов пикосекундной длительности пилообразной формы, а излучают пикосекундные видеоимпульсы в виде последовательности пачек импульсов, причем видеоимпульсы в пачке являются фазоманипулированными по закону псевдослучайной последовательности, запомненный сигнал подвергают согласованной фильтрации.
Технический результат достигается тем, что в устройство, которое реализует способ измерения расстояния до объектов с помощью пикосекундных импульсов, содержащее передающую антенну, связанную с объектом, приемную антенну, связанную с объектом, масштабно-временной преобразователь, первый вход которого соединен с выходом приемной антенны, блок обработки, введены генератор пикосекундных пилообразных видеоимпульсов, первый выход которого соединен с входом передающей антенны, а второй - с вторым входом масштабно-временного преобразователя, первый выход масштабно-временного преобразователя соединен с первым входом блока памяти, выход которого соединен с первым входом согласованного фильтра, выход которого соединен с блоком обработки, второй выход масштабно-временного преобразователя соединен с входом формирователя и первыми входами счетчика адреса и формирователя адреса, второй вход которого соединен с вторым выходом формирователя и входом реверсивного счетчика, а выход - с четвертым входом блока памяти, второй вход которого соединен с выходом первого постоянного запоминающего устройства, вход которого соединен с выходом счетчика адреса, второй вход которого соединен с третьим выходом формирователя, первый выход которого соединен с третьим входом блока памяти, выход реверсивного счетчика соединен с входом второго постоянного запоминающего устройства, выход которого соединен со вторым входом согласованного фильтра.
Применение видеоимпульсов пикосекундной длительности обеспечивает высокое разрешение по дальности при высокой дальности.
Излучение пикосекундных видеоимпульсов в виде последовательности пачек импульсов позволяет существенно увеличить измеряемую дальность до объектов по сравнению с прототипом.
Благодаря способу в принципе появляется возможность осуществления согласованной фильтрации принятого (отраженного от объекта) сигнала - видеоимпульсов и повышения помехозащищенности за счет улучшения отношения сигнал/шум.
На фигуре 1 представлены сведения, подтверждающие возможность осуществления способа: рассмотрены сигналы и операции над ними согласно способу, позволяющие достичь технического результата. На фигуре 2 представлена структурная схема устройства для реализации способа. На фигурах 3 и 4 представлены диаграммы, поясняющие работу способа и устройства для его реализации.
Способ осуществляется следующим образом:
- генерируют периодическую последовательность пикосекундных видеоимпульсов пилообразной формы;
- излучают периодическую последовательность пикосекундных видеоимпульсов в виде последовательности пачек, причем видеоимпульсы пикосекундной длительности в пачке являются фазоманипулированными по закону псевдослучайной последовательности;
- зондируют излученной периодической последовательностью пикосекундных видеоимпульсов исследуемый объект;
- принимают отраженный от объекта сигнал;
- подвергают масштабно-временному преобразованию принятый сигнал;
- квантуют преобразованный сигнал;
- запоминают квантованный сигнал;
- подвергают согласованной фильтрации запомненный квантованный сигнал;
- обрабатывают запомненный профильтрованный сигнал и получают измерительную информацию об исследуемом объекте путем отсчета по индицируемым данным, данным, зафиксированным в виде твердой копии или на ПЭВМ.
Способ реализуется следующим образом.
Излученный (зондирующий) сигнал, форма которого заранее известна, представляет собой пачку (последовательность) фазоманипулированных (ФМ) видеоимпульсов пикосекундной длительности по закону псевдослучайной последовательности (ПСП), периодически повторяющейся. Следовательно, и принимаемый сигнал является ФМ сигналом, обладающим наибольшей потенциальной помехозащищенностью. Кроме этого, отношение сигнал/шум для ФМ сигнала увеличивается в N1/2 по сравнению с одиночным импульсом (N - число импульсов в пачке; N>>1 и может быть порядка 10000), что равносильно повышению в N раз точности измерения дальности до объекта. С другой стороны, увеличение энергии излучаемого сигнала в N раз (обычно N>>2) способствует измерению в N раз большей дальности до объектов (на что и направлен способ). Сравнительная простота фазового кодирования обеспечивает успешную реализацию способа.
Экспериментальные исследования показывают, что наиболее оптимальные условия распространения зондирующего сигнала и соответственно содержание информации об объекте осуществляются в диапазоне от 100-200 МГц до 10 ГГц. В этом диапазоне обеспечиваются независимость от погодных условий и минимально возможный уровень температурных шумов при распространении. Поэтому длительность видеоимпульсов в пачке выбирают исходя из этого частотного диапазона и для верхней границы диапазона она составляет tимп.опт=100 пс.
Поскольку форма и параметры зондирующего сигнала заранее известны, то данный способ обеспечивает возможность осуществления согласованной фильтрации принимаемого сигнала, что в прототипе невозможно выполнить в принципе. Аппаратуру для реализации согласованной фильтрации отличает простота и малая зависимость рабочих характеристик от точности регулировок при малых габаритах и весе. Сам процесс согласованной фильтрации представляет собой "выравнивание" временных структур сигнала и шума. Кроме этого, применение принципа адаптации при приеме обеспечивает дополнительное подавление помех [4].
Возможность осуществления способа рассмотрим на примере (фиг.1):
- зондирующего сигнала в виде псевдослучайной последовательности пикосекундных импульсов с N=5,
- оптимальной фильтрации принимаемого сигнала (вычисление автокорреляционной функции),
- реализации измерения дальности до исследуемого объекта.
Конкретно это выражается в следующем.
Генерируют периодическую последовательность пикосекундных видеоимпульсов пилообразной формы.
Сформированные импульсы излучают и получают зондирующий сигнал, представляющий собой последовательность пачек ФМ видеоимпульсов пикосекундной длительности (ФМ по закону ПСП) с N=5.
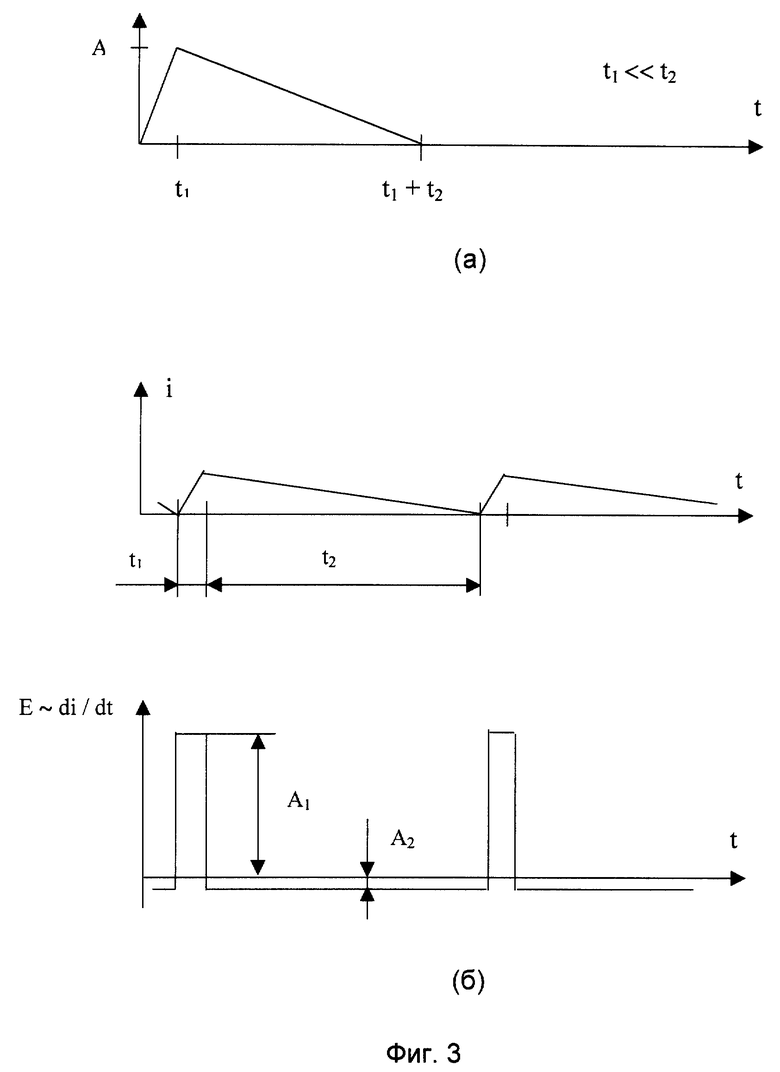
Это можно представить следующим образом. Генерируют, например, одновременно пикосекундные видеоимпульсы пилообразной формы соответствующей полярности, сдвинутые относительно друг друга на постоянную величину tсдв, равную длительности фронта видеоимпульса tф (tсдв=tф). В процессе излучения каждого видеоимпульса пикосекундной длительности происходит преобразование импульса тока пилообразной формы в напряженность поля зондирующего сигнала: Е~di/dt, где Е - напряженность электрического поля в дальней зоне, i - ток в излучателе.
Следовательно, каждый излученный импульс займет соответствующее место во временной последовательности и образуется пачка видеоимпульсов, представляющая собой ФМ сигнал требуемого вида, периодически повторяющийся.
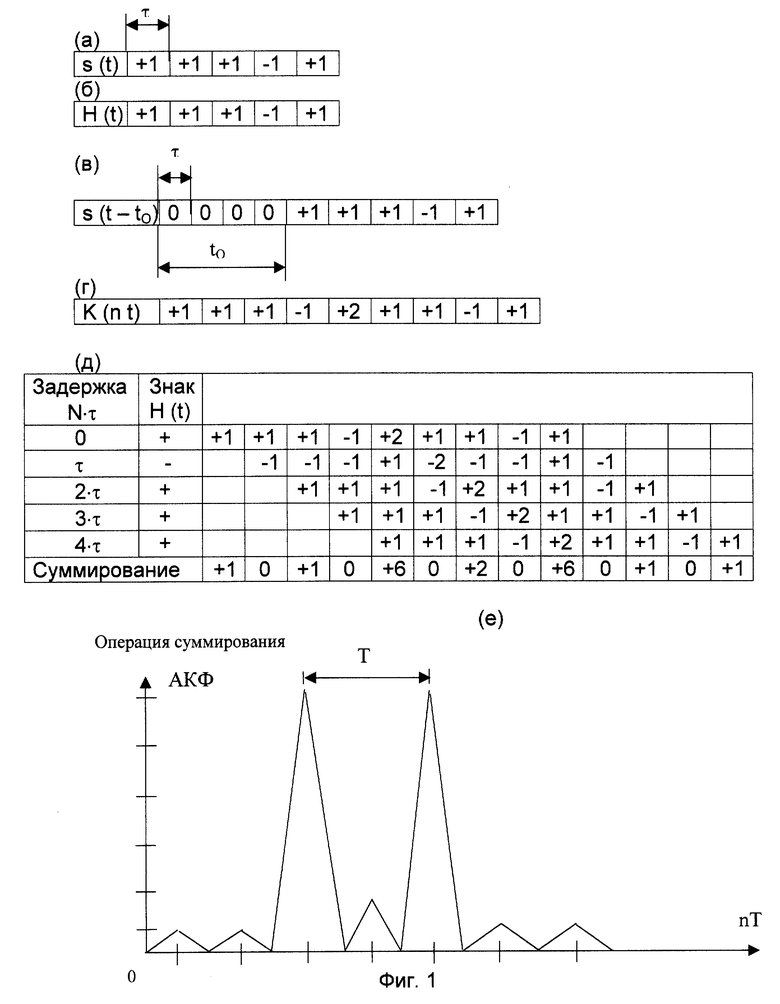
Обозначив положительные и отрицательные импульсы в ФМ сигнале как "+1" и "-1", представим зондирующий ФМ сигнал в виде (фиг.1а)
s(t)=[+1 +1 +1 -1 +1].
Запишем отраженный сигнал как (фиг.1в)
s(t-to)=[0 0 0 +1 +1 +1 -1 +1],
где to - временная задержка между s(t) и s (t-to), несущая информацию о дальности до объекта.
Импульсная характеристика Н(t) (фиг. 1б) для s(t) является зеркальным отображением s(t) относительно оси ординат. Следовательно,
Н(t)=[+1 -1 +1 +1 +1].
Поскольку форма зондирующего сигнала заранее известна, то перед процессом измерения его принимают, считывают дискретные значения сигнала в моменты выборки - дискретизации (масштабно-временное преобразование [5]), формируют по взятым выборкам из ФМ сигнала расширенные сигналы, которые усиливают, квантуют и запоминают.
Для измерения дальности излучают сформированный ФМ сигнал и зондируют им исследуемый объект. Отраженный сигнал принимают, подвергают масштабно-временному преобразованию, преобразованный сигнал квантуют и запоминают измеряемый сигнал, состоящий из суммы принятого сигнала s(nT-То) (прошедшего масштабно-временное преобразование) и предварительно дискретизированного (операция масштабно-временного преобразования) и запомненного зондирующего сигнала s(nT) (фиг. 1г), где То - значение to после масштабно-временного преобразования (в трансформированном масштабе времени), Т - период дискретизации, n=0, 1, 2, ..., k-1.
Поскольку сигналы s(t) и s(t-to) разнесены во времени, то при t>0 сначала запоминают сигнал s(nT), а начиная с момента времени t=to, запоминают измеряемый сигнал
so(nT)=s(nT)+s(nT-То).
После того как сигнал so(nT) запомнен, его подвергают согласованной фильтрации, что можно представить в следующем виде.
Запомненные значения сигнала so(nT) задерживают относительно самих себя на постоянную величину τ (где τ - длительность одного импульса в ФМ зондирующем сигнале из общего числа N в трансформированном масштабе времени, как показано на фиг. 1): второй относительно первого на τ, третий относительно второго на τ и так далее. Одновременно их инвертируют в соответствии со знаками функции Н(t): знак "+" не инвертируют, знак "-" инвертируют. Полученные таким образом сигналы суммируют, а суммарный сигнал в свою очередь суммируют с накоплением (к данному значению прибавляют сумму всех предыдущих значений) с таким же сигналом, но который задержан на величину τ и проинвертирован (фиг.1д).
В результате получают данные, несущие информацию об исследуемом объекте. После выполняют операцию, например преобразование код - аналог, получают измеряемый сигнал в аналоговом виде и индицируют его, например, на экране монитора ПЭВМ, а по индицируемым данным непосредственно определяют требуемый параметр (фиг. 1е). Из фиг. 1е видно, что временной интервал между двумя главными максимумами автокорреляционной функции (АКФ) равен То, то есть в точности соответствует значению to, но в трансформированном масштабе времени.
В данном примере было взято значение to=4τ/к, а То получилась равной 4Т, где к - коэффициент трансформации [5].
Поскольку τ и Т известны заранее, то искомую величину получают в виде значения с/2То, где с - скорость света. Измерению величины to будет соответствовать изменение временного положения двух главных максимумов АКФ.
Покажем, что данный способ (процесс) измерения дальности до объекта является оптимальным. Автокорреляционная функция (АКФ) измеряемого сигнала so(nT) представляет собой выражение вида
где mN - количество выборок; l•tc=l(Tm) - интервал сдвига; l=0, 1, 2, .. ., k-1; k - общее число измеряемых ординат корреляционной функции.
С учетом определения измеряемого сигнала получим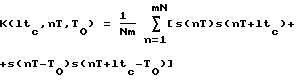
В этом выражении АКФ so(nT) представляет собой сумму АКФ сигналов s(nT) и s(nT-То), то есть то, что представлено на фиг.1 (расстояние между главными максимумами АКФ so(nT) и есть искомая дальность).
При измерении расстояния до движущегося объекта появляется доплеровский сдвиг, величина которого определяется направлением и скоростью движения объекта. Выделяя разностный сигнал и подвергая его преобразованию Фурье, возле составляющих, соответствующих расстоянию до объекта, обнаруживают спектр, ширина которого соответствует скорости объекта. Методика таких измерений достаточно исследована и апробирована [1].
Для ФМ сигнала отношение сигнал/шум по напряжению равно
СИГНАЛ/ШУМ=(N•2E1/a)l/2,
где E1 - энергия одного импульса ФМ сигнала, а - односторонняя спектральная плотность шума.
С ростом значения N отношение сигнал/шум увеличивается:
- для N=5 оно в 2,2 раза больше, чем для одного импульса,
- для N=255 оно в 16 раз больше, чем для одного импульса.
Таким образом, главные максимумы АКФ (фиг.1е) будут в N1/2 раз более четко выделяться на фоне шумов, а отношение сигнал/шум и точность измерения будут в N1/2 раз больше, чем у прототипа. При полосе частот 10 ГГц (tимп=100 пс, шумовая температура 80 К) разрешение по времени равно 0,1 нc, что соответствует разрешению по дальности не более 1-1,5 см (затухание практически отсутствует). Для N=1000 измеряемая дальность достигает 300-1500 км, что существенно больше, чем у прототипа. Таким образом, технический результат, которой обеспечивает предлагаемый способ, достигнут.
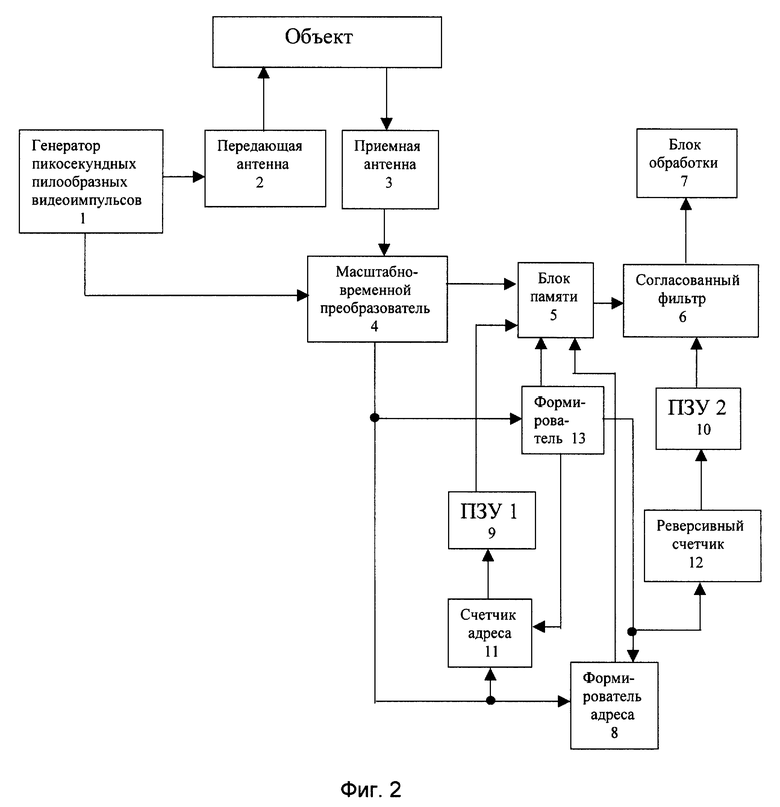
На фигуре 2 представлено устройство, реализующее предлагаемый способ измерения, которое включает генератор 1 пикосекундных пилообразных видеоимпульсов (ГППВИ), передающую антенну 2, приемную антенну 3, масштабно-временной преобразователь (МВП) 4, блок памяти (БП) 5, согласованный фильтр (СФ) 6, блок обработки (БО) 7, формирователь адреса (ФА) 8, первое постоянное запоминающее устройство (ПЗУ1) 9, второе постоянное запоминающее устройство (ПЗУ2) 10, счетчик адреса (СА) 11, реверсивный счетчик (PC) 12, формирователь 13.
Первый выход генератора пикосекундных пилообразных видеоимпульсов 1 соединен с входом передающей антенны 2, а второй выход (синхр.) - со вторым входом масштабно-временного преобразователя 4, первый вход которого соединен с выходом приемной антенны 3, вход которой связан с объектом, который связан с выходом передающей антенны 2, первый выход масштабно-временного преобразователя 4 соединен с первым входом блока памяти 5, выход которого соединен с первым входом согласованного фильтра 6, выход которого соединен с блоком обработки 7, второй выход масштабно-временного преобразователя 4 (упр.) соединен с входом формирователя 13 и первыми входами счетчика адреса 11 и формирователя адреса 8, второй вход которого соединен с вторым выходом формирователя 13 и входом реверсивного счетчика 12, а выход - с четвертым входом блока памяти 5, второй вход которого соединен с выходом первого постоянного запоминающего устройства 9, вход которого соединен с выходом счетчика адреса 11, второй вход которого соединен с третьим выходом формирователя 13, первый выход которого соединен с третьим входом блока памяти 5, выход реверсивного счетчика 12 соединен с входом второго постоянного запоминающего устройства 10, выход которого соединен со вторым входом согласованного фильтра 6.
Устройство работает следующим образом. Всю работу можно разделить на собственно измерение и предварительный цикл.
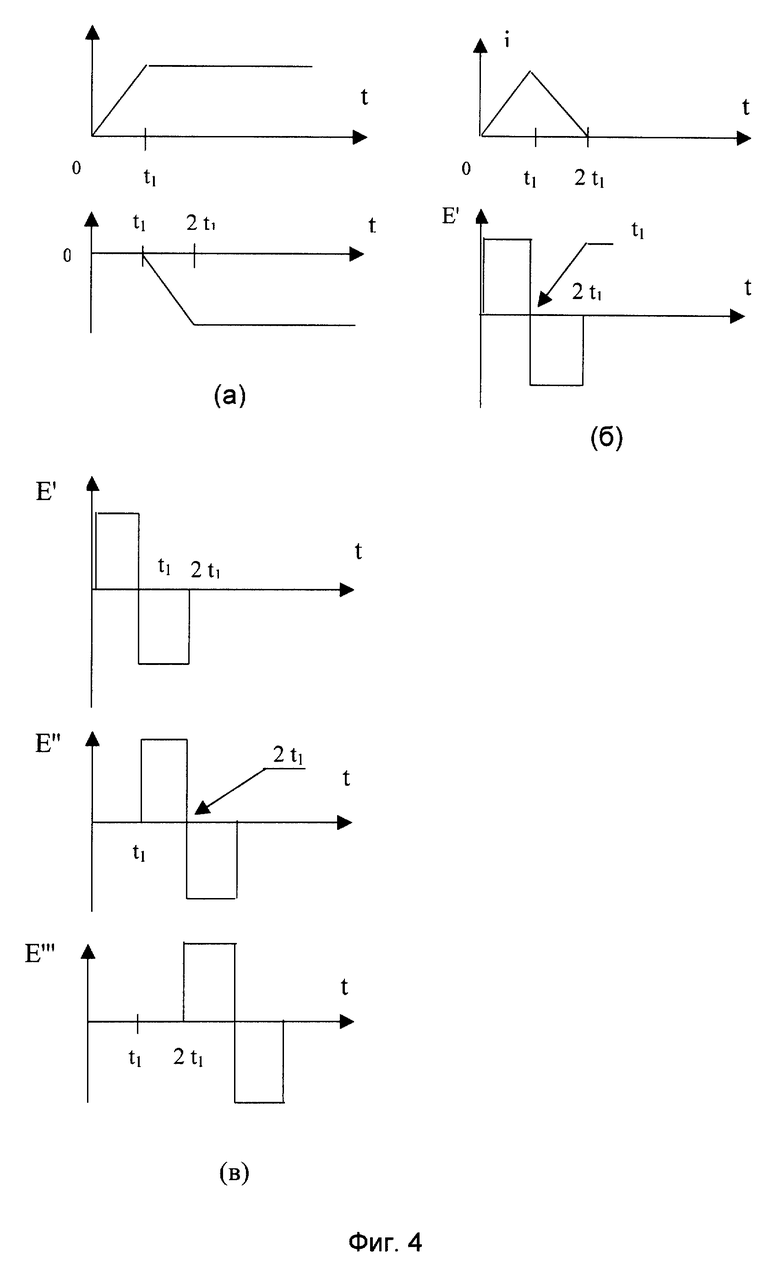
Последнее представлено на фиг.3 и фиг.4. Генератор 1 вырабатывает пилообразные видеоимпульсы (ПВИ) с пикосекундной длительностью фронта. Формирование ПВИ можно осуществить несколькими методами. Наиболее просто это обеспечивается с использованием перепада тока или напряжения. В настоящее время формирование перепадов напряжения с длительностью фронта порядка 40-60 пс и амплитудой 30-50 В не представляет практической трудности.
Сформированный положительный перепад пикосекундной длительности суммируют с отрицательным перепадом микросекундной длительности, задержанным на время t1. В результате получают ПВИ, как показано на фиг.3а. Первая производная тока Е~ di/dt показана на фиг.3б. Поскольку t1<<t2, то А2<<A1 и А2 практически не учитывают и можно говорить, что формируется последовательность импульсов пикосекундной длительности, из которых "набирают" ФМ зондирующий сигнал требуемого вида.
Сформированный перепад задерживают, инвертируют и суммируют с исходным, получая ПВИ (фиг. 4а). ПВИ тока подается на передающую антенну 2 (фиг.2), которая представляет собой многофункциональную фазированную антенную решетку (ФАР), например, как это рассмотрено в [6]. ПВИ тока приложен к определенному антенному элементу. В результате излучения осуществляется преобразование ток-->напряженность поля (фиг.3б, 4б). К каждому элементу ФАР подводится ПВИ тока с соответствующей задержкой: 0, t1, t2.... Формирование зондирующего сигнала осуществляется за счет последовательного излучения во времени элементами ФАР полей Е', Е'', Е'''... (фиг.4в) и их суммирования, что обеспечивает требуемый ФМ зондирующий сигнал. Задержку сигнала, поступающего на элементы ФАР, можно выполнить на отрезках передающих линий, имеющих небольшую длину и не вносящих искажения. Использование ФАР позволяет организовать гибкую систему измерения, что более предпочтительно по сравнению с обычными антеннами.
Излученный сигнал принимается антенной 3 и поступает на вход МВП 4. Крутым фронтом первого импульса генератора 1 осуществляется синхронизация (синхр.) работы всего устройства.
Коды с выхода МВП 4 поступают на вход первого ПЗУ1 9 (фиг.2), в котором записываются последовательно (в порядке поступления) все значения зондирующего сигнала в моменты дискретизации. Управление ПЗУ1 9 осуществляется счетчиком адреса 11, который срабатывает от каждого сигнала "Упр." на своем входе и определяет соответствующий адрес для соответствующего кода. Одновременно сигнал с выхода МВП 4 поступает на вход ПЗУ2 10, работой которого управляет счетчик импульсов 12. Последний является реверсивным счетчиком и срабатывает не от каждого сигнала "Упр." на входе, а только на один, приходящийся на каждый видеоимпульс в пачке ФМ сигнала. Следовательно, в ПЗУ2 10 записывается информация о полярности каждого видеоимпульса в пачке "+" или "-" (ПЗУ знаков).
В процессе измерения информация из ПЗУ2 10 переписывается в блок памяти 6, но в обратном порядке: что было последним на входе ПЗУ2 10, то станет первым на его выходе и так далее и считывание информации из ПЗУ2 10 происходит с инверсией адресов - в обратном порядке по сравнению с процессом записи.
Таким образом, вся необходимая информация для работы устройства занесена в соответствующие узлы 9 и 10 (фиг.2). Отметим, что на выходе ПЗУ2 10 (фиг. 2) находится элемент (преобразователь уровня), преобразующий информацию в виде "+" и "-" в уровни соответственно "0" и "1".
Процесс измерения осуществляется следующим образом. Генератор 1 (фиг.2) вырабатывает видеоимпульсы пикосекундной длительности, как описано выше, поступающие на антенну 2 в виде ФАР, которая излучает зондирующий ФМ сигнал. Отраженный от объекта сигнал принимается антенной 3 и поступает на вход МВП 4. От фронта первого импульса генератора 1 осуществляется синхронизация МВП 4 (синхр. ). Последний своим сигналом "Упр." запускает формирователь адреса 8, формирователь 13, который вырабатывает сигнал "запись" для блока памяти 5 для записи информации по соответствующим адресам, и счетчик 11, под действием сигнала которого происходит перезапись информации из ПЗУ1 9 в блок памяти 5. На входе блока памяти 5 находится сумматор для сложения сигналов с выходов МВП 4 и ПЗУ1 9, в результате чего образуется измерительный сигнал so(nТ). Формирователь 13 вырабатывает сигнал "чтение" информации в блоке памяти 5.
Сигнал с выхода формирователя 13 запускает реверсивный счетчик 12, который управляет работой ПЗУ2 10, обеспечивая вывод из ПЗУ2 10 информации о знаках Н(t), поступающей на управляющие входы блока 6. Одновременно выходной сигнал формирователя 13 поступает на вход блока 8, обеспечивая формирование адресов последним для последовательного вывода информации, записанной в блоке памяти 5. Выходной сигнал формирователя 13 (сброс) устанавливает в исходное состояние счетчик адреса 11.
Согласованную фильтрацию выполняет узел, собранный на счетчиках, которые обеспечивают задержку на τ, 2τ,... (N-1)τ и τ.
На выходе блока 6 получается сигнал, в аналоговом виде представленный на фиг. 1е, который поступает в блок обработки 7. Последний включает в себя ПЭВМ. Проведенная обработка позволяет определить необходимые параметры объекта.
При проектировании устройства можно объединить первое и второе ПЗУ, согласованный фильтр, блок обработки, блоки 8, 11, 12, 13 в единый узел. Если к этому еще добавить МВП, то эту часть устройства можно организовать на базе широкополосной измерительной системы С9-11 [7], которая существенно упрощает реализацию предлагаемого способа измерения.
Рассмотренная возможная реализация устройства на основе способа измерения показывает, что блоки устройства построены на известных принципах и реализуемы практически. Все это упрощает применение предлагаемого способа.
Таким образом, промышленное применение способа показывает следующее.
Применение особой формы генерируемого сигнала и зондирующего сигнала, как последовательности ФМ пикосекундных видеоимпульсов при соответствующем выборе длительности каждого импульса в заданных пределах и обеспечение возможности операции согласованной фильтрации приводят к существенному повышению точности измерения расстояния до объектов. Использование ФАР при операции излучения позволяет суммировать мощность от отдельных одинаковых антенных элементов и способно привести к увеличению мощности зондирующего сигнала. В процессе измерения возможно совмещение операций масштабно-временного преобразования, квантования и согласованной фильтрации, поскольку выполняются одним устройством типа С9-11.
Данный способ обеспечивает повышенную дальность измерения, характерную для длинного импульса (как у аналога), при сохранении высокого разрешения, свойственного коротким зондирующим импульсам (как у прототипа), но не является суммой прототипа и аналога, И все это при высокой точности измерений за счет эффективного подавления шумов.
Периодические видеоимпульсные ФМ сигналы пикосекундной длительности с ФМ по закону ПСП позволяют повысить уровень достоверности обнаружения и измерения расстояния. Такие сигналы позволяют на качественно новом уровне решать указанные задачи, повышая возможности измерительных систем на основе предлагаемого способа. Необходимо отметить возможность полной автоматизации всего измерительного процесса и применения вторичной обработки данных (при операции обработки), направленных не только на повышение качества измерений, но и на решение более широкого круга задач при выполнении самых разнообразных измерений.
Способ при высокой точности измерений обеспечивает высокую плотность энергии, хорошее взаимодействие с зондируемым объектом, низкую стоимость аппаратурной реализации.
Пикосекундный импульс в ФМ зондирующем сигнале, имея широкий спектр, обеспечивает дополнительную помехозащищенность способа.
Сформировать пилообразный сигнал (операция генерирования) на практике легче, чем прямоугольный.
При использовании зондирующего ФМ сигнала с длительностью видеоимпульса, равной 100 пс, разрешающая способность измерений составляет не хуже 1-1,5 см.
Способ позволяет по измеренной дальности определить скорость, ускорение и производные скорости более высокого порядка, что увеличивает количество информации об объекте.
Сравним данный способ с аналогом и прототипом.
Для аналога современный уровень развития позволяет при частоте несущей 94 ГГц обеспечить полосу частот 10 ГГц. При этом разрешение в 2 раза хуже, а шумовая температура в 3 раза выше, чем в случае измерения без несущей. Следовательно, полезный диапазон дальностей и точность измерения дальности вдвое меньше, чем у способа без несущей. По сравнению с прототипом точность измерения, исходя из отношения сигнал/шум (N•2E1/a)1/2/(2E1/a)=N1/2, увеличилась в N1/2 раз при N>1. При этом дальность за счет увеличения энергии сигнала увеличилась в N раз.
Наличие мощного зондирующего импульса как в [1] в данном случае необязательно, так как данный способ позволяет формировать зондирующий сигнал достаточно большой длины (длина пачки) с энергией N•E1, а принятый сигнал может подвергаться таким операциям, что в результате формируются достаточно узкие импульсы (фиг.1), снижая зависимость от излучаемой мощности.
В данном случае обеспечивается большое значение произведения длительности на ширину спектра, а количество информации, которое сигнал способен перенести, растет пропорционально его длительности и ширине занимаемой полосы частот (что, по крайней мере, в 2 раза лучше, чем у прототипа и аналога).
Таким образом, предлагаемый способ обладает рядом существенных преимуществ перед прототипом.
Предлагаемый способ можно положить в основу при разработке измерительных устройств и систем, которые найдут широкое применение:
- для интроскопии недр земли (подземные исследования) - обнаружения полостей в грунте (зондирование в шахтах), оперативного отображения профилей грунта;
- как всепогодный локатор;
- для измерения толщины льда, поиска посадочных площадок (ледовая разведка);
- для сопровождения различных объектов - обеспечения безопасности движения грузового транспорта.
Литература
1. Применение цифровой обработки сигналов. /Под ред. Э. Оппенгейма. М.: Мир. - 1980. - 550 с. (с.272-275).
2. Сколник М. Введение в технику радиолокационных систем. М.: Мир, 1965. - 748 с. (с.16, 113, 118-121, 125, 126, 146).
3. Беннетт С.Л., Росс Дж.Ф. Время-импульсные электромагнитные процессы и их применение. //ТИИЭР. - 1978. - Т.66. - 3. - С.35-57 (прототип), (с.40, рис.7).
4. Комптон Р. Т. Адаптивная антенная решетка в широкополосной системе связи. //ТИИЭР. - 1978. - Т.66. - 3. - С.23-34.
5. Рябинин Ю.А. Стробоскопическое осциллографирование. М.: Сов. радио, 1972. - 272 с. (с.6-10).
6. Бош Б.Г. Гигабитовая электроника. Обзор. //ТИИЭР. - 1979. - Т.67. - 3. - С.5-50.
7. Андриянов А. В. , Шпак И.И. Цифровая обработка информации в измерительных приборах и системах. - Мн.: Выш. шк., 1987. - 176 с. (с.126-133).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОНДЕР | 1997 |
|
RU2133482C1 |
| РАДИОПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2113056C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ СИГНАЛА СЛУЧАЙНОГО ПРОЦЕССА | 1993 |
|
RU2072563C1 |
| КОМПЛЕКС МНОГОКАНАЛЬНОЙ ЭКСПРЕСС ДИАГНОСТИКИ | 1997 |
|
RU2152073C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1990 |
|
RU2024194C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| КОМПЛЕКС ЭКСПРЕСС-ДИАГНОСТИКИ МНОГОКАНАЛЬНЫХ ЦИФРОВЫХ БЛОКОВ | 1997 |
|
RU2141686C1 |
| РАДИОЛОКАТОР СО СЖАТИЕМ СИГНАЛОВ | 1984 |
|
SU1840559A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СИГНАЛА СЛУЧАЙНОГО ПРОЦЕССА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2097917C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ИНТЕРВАЛОВ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2139562C1 |
Изобретение относится к радиоизмерительной технике и может быть использовано при построении различных автоматизированных измерительных систем для измерения расстояния до исследуемых объектов. Технический результат изобретения - повышение точности измерения расстояния до объектов. Способ заключается в генерировании периодической последовательности пикосекундных видеоимпульсов пилообразной формы, излучении периодической последовательности пикосекундных видеоимпульсов в виде последовательности пачек, причем видеоимпульсы пикосекундной длительности в пачке являются фазоманипулированными по закону псевдослучайной последовательности,; зондировании излученной периодической последовательностью пикосекундных видеоимпульсов исследуемого объекта, приеме отраженного от объекта сигнала, масштабно-временном преобразовании принятого сигнала, квантовании преобразованного сигнала, запоминании квантованного сигнала, согласованной фильтрации запомненного квантованного сигнала, обработке запомненного профильтрованного сигнала и получении измерительной информации об исследуемом объекте путем отсчета по индицируемым данным, данным, зафиксированным в виде твердой копии или на ПЭВМ. Устройство содержит генератор пикосекундных пилообразных видеоимпульсов, передающую антенну, приемную антенну, масштабно-временной преобразователь, блок памяти, согласованный фильтр, блок обработки, формирователь адреса, первое постоянное запоминающее устройство, второе постоянное запоминающее устройство, счетчик адреса, реверсивный счетчик, формирователь. 2 с.п.ф-лы, 4 ил.
| БЕННЕТ С.Л., РОСС ДЖ.Ф | |||
| Времяимпульсные электромагнитные процессы и их применение | |||
| - ТИИЭР, 1978, т.66, №3, с.35-57 | |||
| ПЕЛЕНГАЦИОННЫЙ СПОСОБ КОНИЩЕВА ОПРЕДЕЛЕНИЯ ВРЕМЕННОГО ПОЛОЖЕНИЯ ВИДЕОИМПУЛЬСА | 1990 |
|
RU2018860C1 |
| US 4896159, 23.01.1990 | |||
| DE 4218303 C1, 03.03.1994 | |||
| US 5153595 A, 06.10.1992. | |||

