Заявляемое изобретение относится к медицинской технике, в частности к устройствам для ориентирования слепых в окружающем пространстве, и может быть использовано при самостоятельном передвижении слепого в недетерминированной обстановке.
Известна ультразвуковая трость "UltraCane", материал о которой опубликован, например, в газете "Yorkshire Post" за 1 февраля 2005 г., раздел "Busiess week", статья "Sound idea offers help to the blind". Более подробная инфомация о трости "UltraCane" имеется в Интернете, на сайте www.soundforsight.co.uk. Трость "UltraCane" содержит 2 жестко закрепленных ультразвуковых приемоизлучателя, устройство обработки информации и сигнализатор в виде вибродатчиков, вмонтированных в рукоятку трости. Внешний вид приемоизлучателей трости "UltraCane" приведен в приложении 2. Ось одного приемоизлучателя при пользовании тростью направлена вперед по отношению к пользователю (для обнаружения удаленных препятствий по ходу движения), ось второго - под некоторым углом выше горизонта (для обнаружения препятствий на уровне головы). Приемоизлучатели генерируют ультразвуковые импульсы и принимают отраженные эхосигналы. В зависимости от того, по какому из каналов воспринят эхосигнал, устройство обработки информации включает тот или иной вибродатчик, и пользователь может ориентировочно судить о расположении препятствия.
Недостатком известной трости "UltraCane" является то, что оси направленности ультразвуковых приемоизлучателей жестко фиксированы относительно трости, и пользователь не может по своему желанию изменить, например, высоту зоны обзора сообразно своему росту или каким-либо другим предпочтениям.
Также известна трость "LaserCane", принятая в качестве ближайшего аналога, материал о которой опубликован, например, в журнале "Photonics" за июнь 2003 г., раздел "Accent on application", статья "Lasers assist the Blind". Более детальная инфомация о трости "LaserCane" имеется в Интернете, на сайте www. lasercane.com/lasercane.htm.
В трости "LaserCane" используются 3 лазерных приемоизлучателя, лучи которых направлены при пользовании тростью соответственно:
- прямо вперед;
- вперед и несколько вверх для обнаружения препятствий верхнего уровня;
- вперед и несколько вниз для обнаружения препятствий нижнего уровня, например поребриков.
Преимущество трости "LaserCane" по сравнению с тростью "UltraCane" состоит в том, что направление локационного луча, в данном случае - лазерного, отвечающего за обнаружение препятствий верхнего уровня, а именно на высоте плеч и головы, может быть подстроено пользователем перед началом эксплуатации. Это позволяет, в частности, учесть, под каким углом пользователь привык держать трость при ходьбе, а также избежать обнаружения «лишних» препятствий, расположенных на безопасной высоте, выше головы пользователя (см. выдержку из htth://nurion.net/page9).
Недостатком трости "LaserCane" является то, что непосредственно в процессе эксплуатации направление локационных лучей относительно оси палки трости остается неизменным, и пользователь не может в любой момент движения по своему желанию изменить угол наклона локационных лучей относительно оси палки трости.
Сканирование зоны обзора в горизонтальной плоскости осуществляется благодаря обычной технике работы тростью для слепых, т.е. посредством периодического покачивания трости вправо-влево, а сканирование вверх-вниз, например, при поиске или уточнении локализации малогабаритных препятствий возможно только путем поднятия-опускания трости, что неудобно для пользователя и опасно для окружающих, если устройство используется в людном месте.
Еще одним недостатком, присущим как трости "LaserCane", так и трости "UltraCane", является использование двух (трех) приемоизлучателей для расширения угла обзора в вертикальной плоскости и, соответственно, усложнение системы кодирования сигналов на индикаторе, т.к. пользователь должен отличать друг от друга сигналы опасности, соответствующие различным секторам зоны обзора.
С точки зрения точности определения направления на препятствие в вертикальной плоскости задача в обоих случаях решается весьма грубо: в трости "UltraCane" всего две градации в представлении угла возвышения, а в трости "LaserCane" - три.
Задачей заявляемого изобретения является переход от дискретного представления угловой информации к непрерывному и повышение оперативности управления углом наклона приемоизлучателя относительно оси палки в процессе движения пользователя.
Указанная задача решается за счет того, что в трости для инвалида по зрению, содержащей палку с рукояткой, приемоизлучатель, установленный в трости с возможностью изменения угла наклона в общей плоскости симметрии палки и рукоятки, блок обработки информации и сигнализатор, приемоизлучатель снабжен средством оперативного управления углом его наклона к оси палки в процессе движения пользователя.
Приемоизлучатель в трости может быть установлен посредством оси, расположенной перпендикулярно плоскости симметрии трости, и снабжен по крайней мере одним рычагом управления, свободный конец которого выведен на поверхность рукоятки.
Свободный конец рычага управления может быть выведен на верхнюю часть поверхности рукоятки.
Свободный конец рычага управления может быть выведен на нижнюю часть поверхности рукоятки.
Приемоизлучатель может быть снабжен возвратной пружиной, которая одним концом закреплена на рукоятке, а другим концом связана с приемоизлучателем.
Приемоизлучатель может быть снабжен жестко связанным с ним зубчатым колесом, установленным посредством оси, перпендикулярной плоскости симметрии трости, при этом часть зубчатого колеса выступает над поверхностью рукоятки.
Приемоизлучатель может быть снабжен стопором, который закреплен на рукоятке и входит в зацепление с зубчатым колесом.
Техническим результатом изобретения является повышение оперативной управляемости углом наклона приемоизлучателя относительно оси палки в процессе движения пользователя.
Благодаря наличию рычага управления, свободный конец которого выведен на верхнюю часть поверхности рукоятки, появилась возможность управления углом наклона приемоизлучателя посредством, например, большого пальца руки, держащей трость, что позволило пользователю осуществлять произвольное сканирование зондирующего луча в плоскости симметрии трости.
Благодаря наличию рычага управления, свободный конец которого выведен на нижнюю часть поверхности рукоятки, появилась возможность управления углом наклона приемоизлучателя посредством, например, указательного пальца руки, держащей трость.
Благодаря наличию возвратной пружины, приемоизлучатель автоматически возвращается в исходное положение при прекращении воздействия пользователя на рычаг, что обеспечивает определенное направление зондирующего луча относительно оси палки, заранее известное пользователю.
Благодаря наличию зубчатого колеса, скрепленного с приемоизлучателем, появилась возможность ручного управления углом наклона приемоизлучателя относительно оси палки, причем минимизируются размеры элементов, выступающих за пределы рукоятки, и повышается механическая надежность трости в случае ее падения или случайных механических воздействий на трость.
Благодаря наличию стопора, появилась возможность фиксировать угол наклона приемоизлучателя относительно оси палки в любом положении, удобном для пользователя в текущий момент его движения, что позволило освободить палец, воздействующий на элемент ручного управления, а именно на зубчатое колесо.
На Фиг.1, Фиг.2 и Фиг.3 представлены примеры выполнения трости, в разрезе.
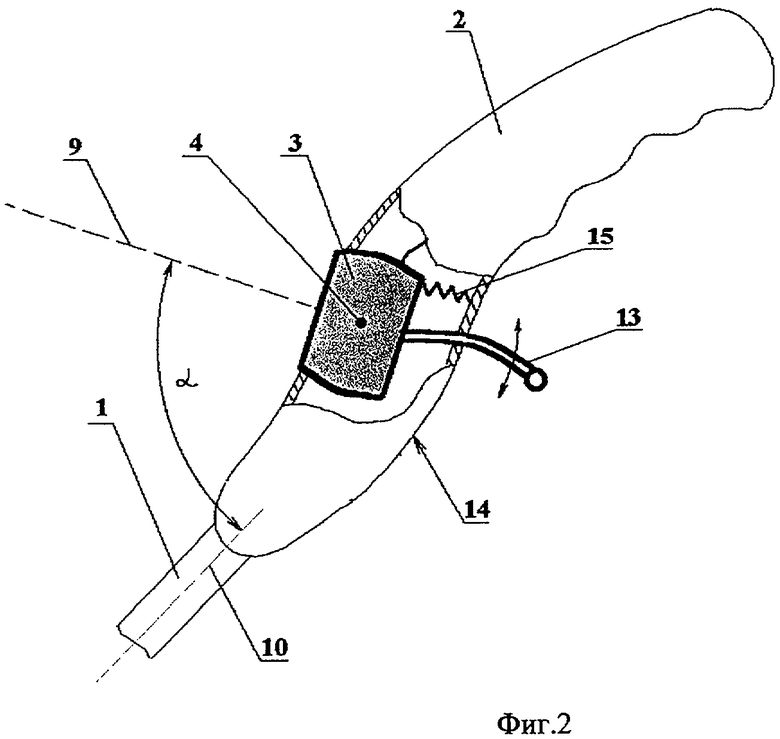
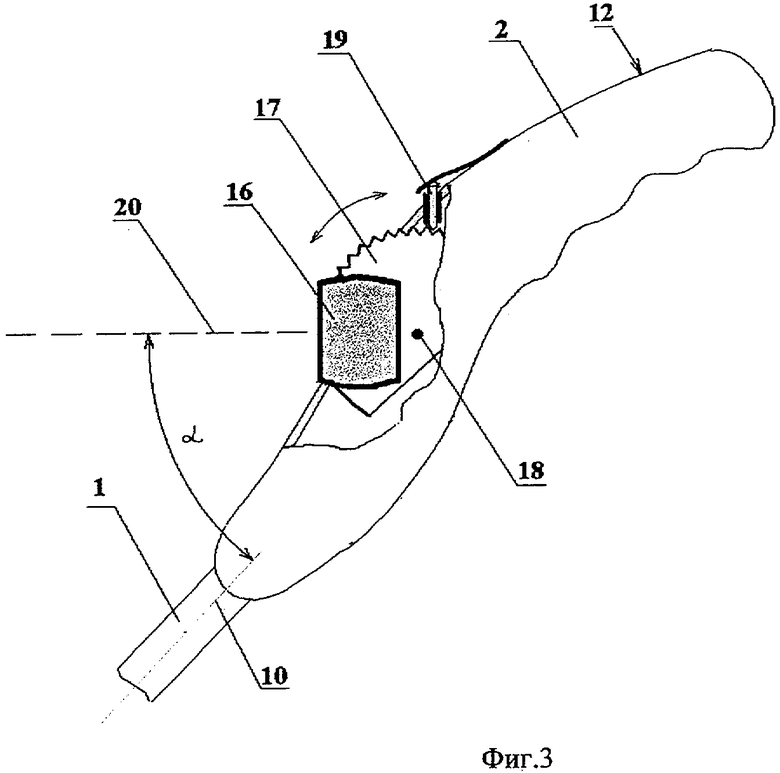
Трость для инвалида по зрению (фиг.1) содержит палку 1, рукоятку 2, приемоизлучатель 3, установленный в рукоятке посредством оси 4, блок 5 обработки информации, источник 6 питания и сигнализатор 7. Ось 4 расположена перпендикулярно плоскости симметрии трости. Конструктивно приемоизлучатель 3, блок 5 обработки информации, источник 6 питания и сигнализатор 7 расположены внутри рукоятки 2 и взаимосвязаны электрической цепью 8. Приемоизлучатель 3 установлен с возможностью изменения угла α наклона его оси 9 направленности относительно оси 10 симметрии палки 1 в общей плоскости симметрии палки 1 и рукоятки 2, т.е. в плоскости симметрии трости. К приемоизлучателю 3 прикреплен рычаг 11 управления, свободный конец которого выведен на верхнюю часть 12 поверхности рукоятки 2. На фиг.2 приведен пример выполнения трости, когда к приемоизлучателю 3 прикреплен рычаг 13 управления, свободный конец которого выведен на нижнюю часть 14 поверхности рукоятки 2. Приемоизлучатель 3 снабжен возвратной пружиной 15, один конец которой закреплен на рукоятке 2 (Фиг.1, 2), а другой конец связан с приемоизлучателем. На фиг.3 показан пример, когда приемоизлучатель 16 снабжен жестко связанным с ним зубчатым колесом 17, установленным посредством оси 18 на рукоятке 2, при этом часть зубчатого колеса 17 выступает над верхней частью 12 поверхности рукоятки 2. Ось 18 расположена перпендикулярно плоскости симметрии трости. При этом приемоизлучатель 16 снабжен стопором 19, который закреплен на рукоятке 2 и входит в зацепление с зубчатым колесом 17.
В целом трость функционирует следующим образом.
При расположении свободного конца рычага 11 управления на верхней части 12 поверхности рукоятки 2 (фиг.1) направление оси 9 направленности приемоизлучателя 3 относительно оси 10 симметрии палки 1 может оперативно регулироваться пользователем, например, посредством большого пальца руки, воздействующего на рычаг 11 управления.
При выведенном свободном конце рычага 13 управления на нижнюю часть поверхности рукоятки 2 (фиг.2) пользователь может оперативно регулировать направление оси 9 направленности приемоизлучателя 3 относительно оси 10 симметрии палки 1, например, посредством указательного пальца руки, воздействуя на рычаг 13 управления.
При наличии возвратной пружины 15, которая одним концом закреплена на рукоятке 2, а другим связана с приемоизлучателем 3, положение оси 9 направленности приемоизлучателя 3 относительно оси 10 симметрии палки 1 однозначно определено, а именно в случае отсутствия воздействия на рычаг 11 (или 13) управления со стороны пользователя приемоизлучатель 3 находится в крайнем исходном положении, заранее установленном пользователем.
При наличии зубчатого колеса 17 (фиг.3), жестко связанного с приемоизлучателем 16, пользователь может оперативно регулировать угловое положение оси 20 направленности приемоизлучателя 16 относительно оси 10 симметрии палки 1, например, посредством большого пальца руки, удерживающей трость.
При наличии стопора 19 (фиг.3) приемоизлучатель 16 может быть зафиксирован пользователем относительно рукоятки 2 в наиболее удобном угловом положении на текущий момент движения пользователя.
Техническим результатом изобретения является повышение оперативной управляемости углом наклона приемоизлучателя относительно оси палки в процессе движения пользователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРОСТЬ ДЛЯ ИНВАЛИДА ПО ЗРЕНИЮ | 2007 |
|
RU2352317C1 |
| ТРОСТЬ ДЛЯ ИНВАЛИДА ПО ЗРЕНИЮ | 2011 |
|
RU2473324C2 |
| СКЛАДНАЯ ТРОСТЬ ДЛЯ СЛЕПЫХ | 1999 |
|
RU2184518C2 |
| ТРОСТЬ ДЛЯ ИНВАЛИДОВ ПО ЗРЕНИЮ | 2007 |
|
RU2357720C1 |
| Протез нижней конечности (его варианты) | 1983 |
|
SU1281268A1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Трость для инвалида по зрению | 2021 |
|
RU2768454C1 |
| Ручная тележка для перевозки грузов | 1989 |
|
SU1794775A1 |
| Трость | 1981 |
|
SU1088699A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ ДЛЯ ИНВАЛИДА ПО ЗРЕНИЮ | 2006 |
|
RU2318481C1 |
Изобретение относится к медицинской технике и может быть использовано при самостоятельном передвижении слепого. Трость для инвалида по зрению содержит палку с рукояткой, а также связанные электрической цепью приемоизлучатель, блок обработки информации и сигнализатор. Приемоизлучатель установлен в трости с возможностью изменения угла наклона к оси палки в плоскости симметрии трости и снабжен средством оперативного управления углом наклона в процессе движения пользователя. Изобретение позволяет обеспечить оперативную управляемость углом наклона приемоизлучателя относительно оси палки в процессе движения пользователя. 6 з.п. ф-лы, 3 ил.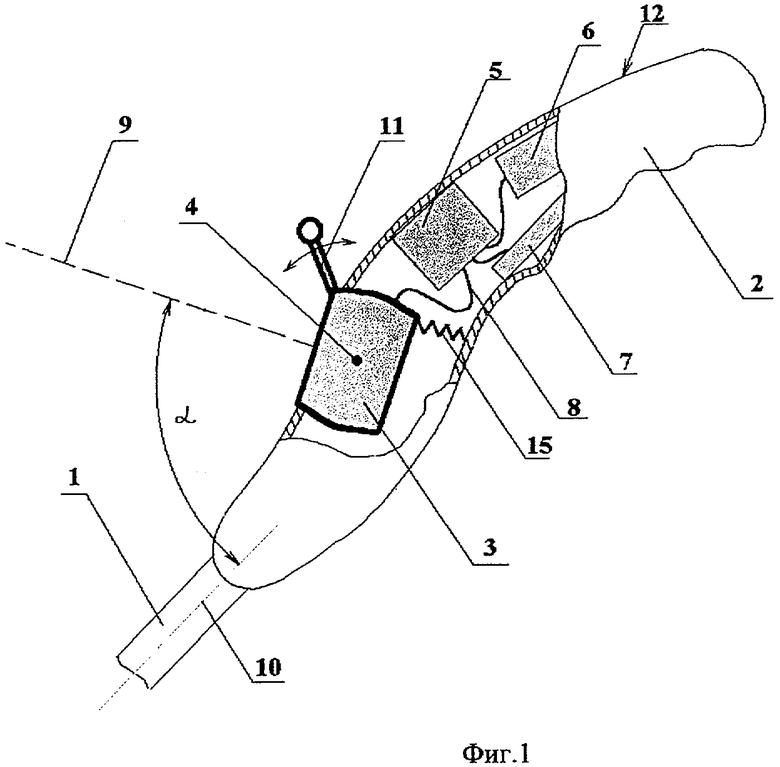
| HITZ В | |||
| Lasers assist the blind, "FOTONICS SPECTRA", (JUN 2003), vol.37, № 6, p.37 | |||
| Стеклянная плитка | 1982 |
|
SU1025828A1 |
| Предохранительное приспособление к автомобилям | 1928 |
|
SU14130A1 |
| Устройство для включения счетных механизмов от дельных смен в ткацких счетчиках при многосменной работе | 1928 |
|
SU16606A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |

