Изобретение относится к технике слежения за мобильными и стационарными объектами и дистанционного управления их состоянием и может быть использовано, например, при слежении за маршрутами транспортных средств и управлении состоянием бензоколонок.
Известны установленные на объектах слежения следящие системы, содержащие датчики параметров, приемо-передающие системы сигналов и команд, средства анализа и обработки информации и органы управления, позволяющие определять координаты объектов слежения, например, по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации (GPS) и/или по картине поля сотовой связи, формировать пакет информации и вести ее обработку по заданной программе.
При этом конструктивные построения известных следящих систем различаются друг от друга в общей компоновке функциональных электронных модулей.
В следящей системе по заявке US 2002/0156576 A, G01C 21/00, 24.10.2002 имеется цилиндрический корпус со съемной крышкой, внутри которого на изолирующем основании с помощью стоек установлены диски с антенным, питающим и электронным узлами.
В следящей системе по патенту GB 2417118 A, G08G 1/123, 15.02.2006, являющейся наиболее близким аналогом заявленной, внутри корпуса со съемной крышкой установлены рама с антеннами и аккумуляторной батареей, а также печатная плата с электронными модулями и элемент разъема. Кроме того, в корпусе предусмотрена перпендикулярная опорная плоскость, перемещающаяся по направляющему рельсу.
Недостатки известных способов слежения за объектами и управления их состоянием, а также следящих систем определяются невозможностью:
- учета событий различного уровня сложности, что приводит в конечном итоге к неэффективному расходу собственных энергоинформационных ресурсов следящих систем, установленных на объектах слежения; - оперативного и автономного управления состоянием объекта, на котором установлена следящая система;
- проведения многоуровневой и соответствующей текущему состоянию объекта адаптации следящей системы, в том числе автономно;
- снижения объема передаваемой по каналам связи информации с сохранением высокого уровня ее достоверности и уменьшения затрат на трафик обмена.
Кроме того, недостатки известных следящих систем связаны с невысокими уровнями виброустойчивости, удароустойчивости и ремонтопригодности конструкций. Наконец, известные системы характеризуются существенным неудобством в обслуживании.
Техническим результатом от использования настоящего изобретения является обеспечение возможности оперативного и автономного управления состоянием объекта, на котором установлена следящая система, в условиях проведения многоуровневой и соответствующей текущему состоянию объекта адаптации следящей системы, а также уменьшение объема передаваемой по каналам связи информации при снижении расхода собственных энергоинформационных ресурсов следящих систем, повышении уровня достоверности передаваемой информации и уменьшении затрат на трафик обмена.
Еще одним техническим результатом от использования изобретения является повышение эффективности следящей системы за счет повышения виброустойчивости, удароустойчивости и ремонтопригодности, а также снижение времени, затрачиваемого оператором на обслуживание системы, которое, в частности, включает в себя изменение конфигурации системы в соответствии с алгоритмом решаемой задачи, проведение ремонтных и диагностических работ и переустановку следящей системы на объекте слежения с учетом наиболее рационального варианта ее размещения.
Технические результаты обеспечиваются заявленной системой слежения за объектами и управления их состоянием, которая содержит:
функциональные электронные модули: блок приема и/или передачи информационных сигналов, блок памяти, внутренние часы, блок приема сигналов с датчиков, блок управления исполнительными устройствами, блок принятия решений, блок зонирования и сравнения сценариев и блок настройки,
блок приема и/или передачи информационных сигналов соединен с блоком памяти, внутренними часами, блоком приема сигналов с датчиков, блоком принятия решений, блоком зонирования и сравнения сценариев и блоком настройки, блок памяти соединен с блоком зонирования и сравнения сценариев и блоком настройки, внутренние часы соединены с блоком зонирования и сравнения сценариев, блоком принятия решений, блоком приема сигналов с датчиков и блоком настройки, блок приема сигналов с датчиков соединен с блоком зонирования и сравнения сценариев и блоком настройки, блок принятия решений соединен с блоком управления исполнительными устройствами, блоком зонирования и сравнения сценариев и блоком настройки, блок зонирования и сравнения сценариев соединен с блоком настройки,
блок приема и/или передачи информационных сигналов, блок приема сигналов с датчиков, блок принятия решений и блок управления исполнительными устройствами выполнены с возможностью подключения к непосредственно взаимодействующим с системой устройствам, к которым относятся датчики, излучатель и приемник излучений, разъем, микрофон, динамик, дисплей, исполнительные устройства и отдельный источник питания,
при этом имеются:
корпус с торцевыми крышками, базовая плата со вспомогательными электронными узлами, фиксаторы, установленные, по крайней мере, на одной стороне базовой платы и выполненные в виде элементов электрических разъемов, дополнительные фиксаторы в количестве не менее двух, установленные перпендикулярно базовой плате, по крайней мере, с одной ее стороны и выполненные в виде плат с ответными элементами электрических разъемов на одной из продольных торцевых поверхностей, координатно сопрягаемыми с соответствующими элементами электрических разъемов на базовой плате,
все стороны внутренней поверхности корпуса выполнены с продольными пазами по всей длине каждой стороны, одна из торцевых крышек корпуса на одной ее стороне выполнена с выступами по периметру, а другая - гладкой,
базовая плата выполнена с возможностью взаимодействия торцевыми поверхностями с гладкими поверхностями торцевых крышек корпуса, выступами одной из них и с пазами внутренней поверхности корпуса,
дополнительные фиксаторы выполнены с возможностью взаимодействия продольными торцевыми поверхностями с пазами корпуса, поперечными торцевыми поверхностями - с гладкой поверхностью одной и гладкой поверхностью и выступами другой торцевой крышки корпуса,
базовая плата установлена с возможностью переустановки путем вращения относительно взаимно перпендикулярных осей, проходящих через ее геометрический центр, торцевые крышки корпуса выполнены также с возможностью переустановки,
упомянутые выше функциональные электронные модули установлены на боковых поверхностях дополнительных фиксаторов.
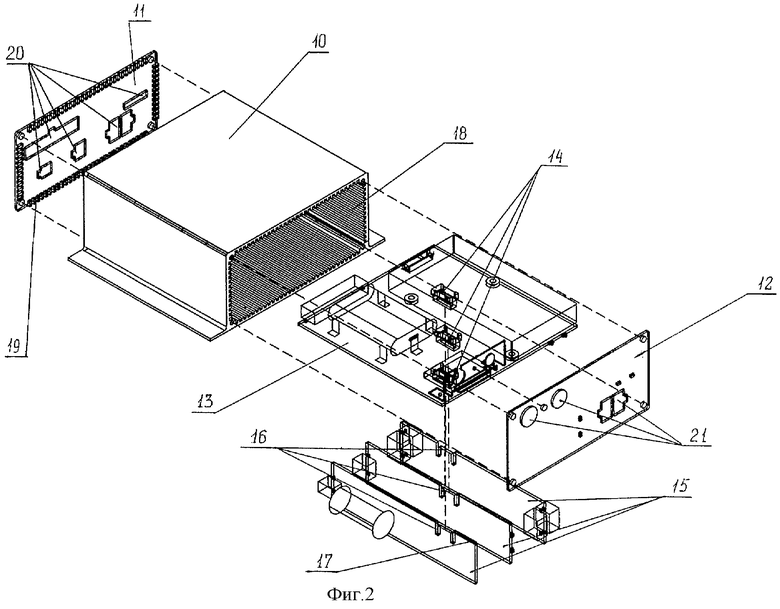
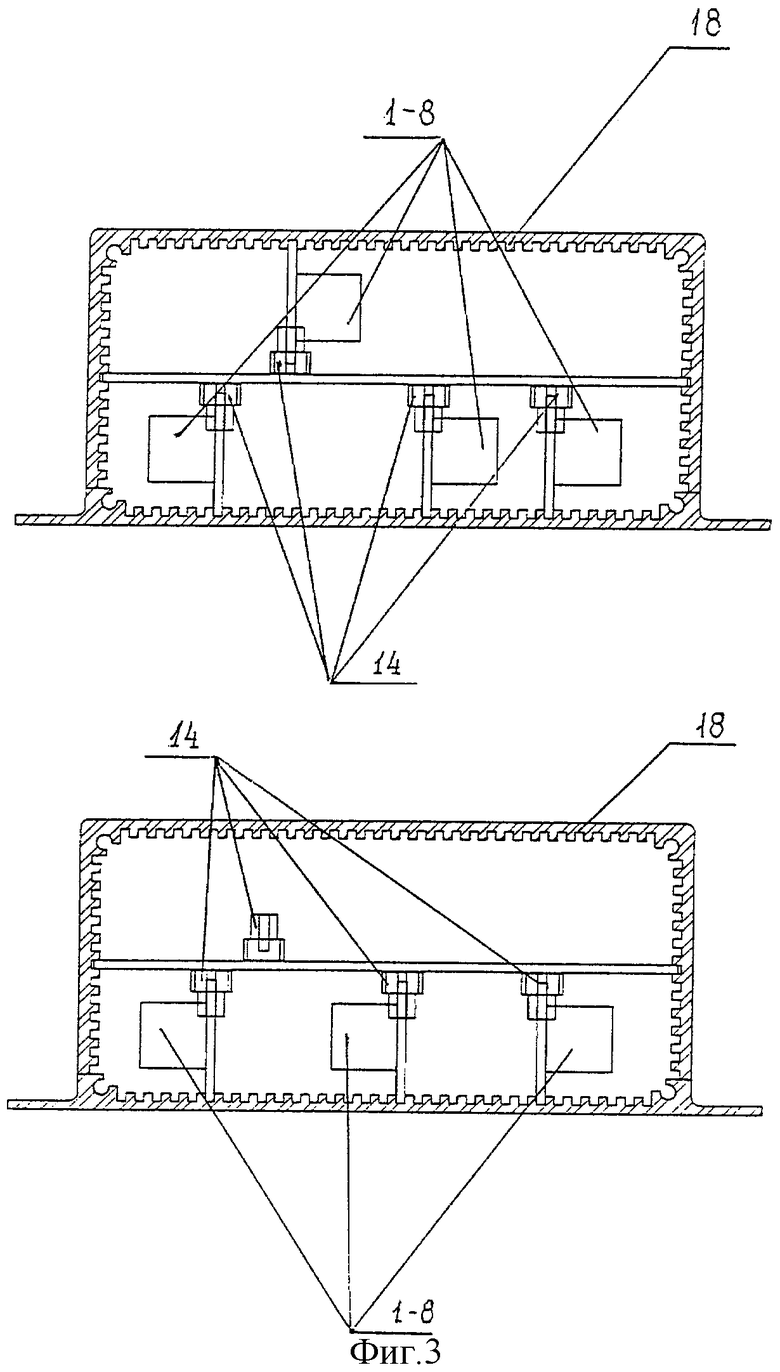
На фиг.1 представлена функциональная схема заявленной системы слежения за объектами и управления их состоянием, на фиг 2 схематически показан общий вид системы слежения, а на фиг.3 приведены варианты размещения элементов системы слежения в корпусе.
Заявленная система содержит функциональные электронные модули: блок 1 (фиг.1) приема и/или передачи информационных сигналов, блок 2 памяти, внутренние часы 3, блок 4 приема сигналов с датчиков, блок 5 управления исполнительными устройствами, блок 6 принятия решений, блок 7 зонирования (картографического) и сравнения сценариев и блок 8 настройки. При необходимости все электронные модули следящей системы подключаются к внутреннему источнику 9 питания.
Система также имеет корпус 10 (фиг.2) с торцевыми крышками 11 и 12, базовую плату 13 со вспомогательнвми электронными узлами, фиксаторы, установленные, по крайней мере, на одной стороне базовой платы 13 и выполненные в виде элементов 14 электрических разъемов, дополнительные фиксаторы 15 в количестве не менее двух, установленные перпендикулярно базовой плате 13, по крайней мере, с одной ее стороны и выполненные в виде плат с ответными элементами 16 электрических разъемов на одной из продольных торцевых поверхностей 17, координатно сопрягаемыми с соответствующими элементами 14 электрических разъемов на базовой плате 13.
На боковых поверхностях дополнительных фиксаторов 15 установлены электронные модули 1-8.
Все стороны внутренней поверхности корпуса 10 выполнены с продольными пазами 18 (фиг.3) по всей длине каждой стороны. Торцевая крышка 11 на одной ее стороне выполнена по периметру с выступами 19, а торцевая крышка 12 - гладкой. Базовая плата 13 установлена, а торцевые крышки 11 и 12 выполнены с возможностью переустановки. Дополнительные фиксаторы 15 установлены перпендикулярно базовой плате 13, по крайней мере, с одной ее стороны в количестве, по крайней мере, не менее двух. Базовая плата 13 взаимодействует торцевыми поверхностями с гладкими поверхностями торцевых крышек 11 и 12, выступами 19 торцевой крышки 11 и с пазами 18 внутренней поверхности корпуса 10. Продольные торцевые поверхности дополнительных фиксаторов 15 взаимодействуют с пазами 18 корпуса 10, поперечные торцевые поверхности дополнительных фиксаторов 15 - с гладкой поверхностью торцевой крышки 12 и с гладкой поверхностью и выступами 19 торцевой крышки 11. Координаты установки элементов 14 электрических разъемов, выполненных на оборотной и лицевой сторонах базовой платы 13, и координаты установки ответных элементов 16 электрических разъемов, выполненных на дополнительных фиксаторах 15, установленных на оборотной и лицевой сторонах базовой платы 13, сопряжены друг с другом. Торцевые крышки 11 и 12 выполнены с технологическими отверстиями 20 и 21, позволяющими производить подключение следящей системы к взаимодействующим с ней устройствам, к которым, в частности, относятся датчики, излучатель и приемник излучений, разъем (разъемы), микрофон, динамик, дисплей, исполнительные и другие устройства.
В процессе слежения за объектами и управления их состоянием проводят картирование поверхностей возможного расположения или перемещения объектов слежения, разбиение этих поверхностей на зоны посредством выбора оператором координат активных и/или пассивных зон в соответствии с совокупностью прогнозируемых в этих зонах простых и сложных событий.
Зоны формируют в виде совокупности кругов с переменными либо постоянными координатами их центров и/или в виде колец с переменными либо постоянными координатами их центров и переменными либо постоянными внутренними и внешними радиусами, и/или в виде многоугольников с произвольным числом сторон.
После этого каждому контролируемому объекту ставят в соответствие ту или иную зону, а оператором и/или следящей системой выбирают совокупность информативных признаков, характеризующих возможное событие для каждого из объектов слежения. В ходе настройки устанавливают минимальное значение последовательных подтверждений пересечения объектом внешних границ зон, выполненных в виде колец и/или многоугольников, а для каждого объекта устанавливают эталонные модели сценариев их возможных перемещений или состояний. Минимальное значение последовательных подтверждений пересечения объектом внешних границ зон выбирают не менее трех за фиксированный или нефиксированный промежуток времени.
При слежении за объектом регистрируют сигналы с датчиков и временные параметры для установленного режима функционирования следящей системы и обрабатывают их трактами следящей системы.
Путем оперативной многопараметрической настройки проводят многоуровневую и соответствующую текущему состоянию объекта адаптацию следящей системы. Многоуровневую адаптацию следящей системы проводят автономно средствами следящей системы или внешними источниками команд и/или управляющих данных.
Далее формируют управляющие команды и проводят передачу и/или прием информационных сигналов. Передачу и/или прием информационных сигналов через канал связи между источником команд и/или управляющих данных и следящей системой, а также между следящей системой и пультом контроля осуществляют посредством излучателя и/или приемника излучений и/или посредством проводной линии связи.
После этого сравнивают сценарии зарегистрированных перемещений и состояний объектов с базовыми сценариями, а при наличии зон картированных поверхностей в виде колец и многоугольников сравнивают также количество зарегистрированных последовательных подтверждений пересечений объектом границ зон с их выбранным минимальным значением. На основании результатов сравнения принимают итоговое решение о посылке сообщения о пересечении объектом слежения зонных границ и/или изменении базового сценария перемещения объекта или его состояния внешним приемникам информации, и/или об изменении настройки следящей системы, и/или о посылке управляющих сообщений на объект слежения, блокирующих режим его функционирования.
По результатам слежения и при развитии ситуации по непрограммируемому сценарию (например, когда количество зарегистрированных последовательных подтверждений пересечений объектом границ зон превышает установленное) принимаются оперативные или технические меры, исключающие дальнейшее развитие непрограммируемого сценария.
Следящая система реализует выполнение зонирования и сравнения сценариев перемещений и состояния объекта. При реализации следящей системой алгоритмов картографического зонирования блок 7 зонирования и сравнения сценариев производит прием и обработку текущих координат расположения объекта слежения, проверку попадания текущих координат объекта в каждую из активных для этой следящей системы (для конкретного объекта) зон, накопление обнаруженных пересечений границ активных зон объектом в течение нескольких периодов съема его текущих координат, после чего формирует сообщение об уверенном пересечении объектом слежения границ активных зон. При осуществлении следящей системой сравнения сценариев изменения состояния объекта слежения блок 7 зонирования и сравнения сценариев принимает информацию с блока 4 приема сигналов с датчиков, сравнивает реальный сценарий изменения состояния объекта, на котором установлена следящая система, с активными шаблонами сценариев, обрабатывает совокупность характеристик, соответствующих зарегистрированным реальным сценариям. При одновременной реализации следящей системой зонирования и сравнения сценариев блок 7 осуществляет прием и обработку текущих координат расположения объекта, проверку попадания текущих координат объекта слежения в каждую из активных для этой следящей системы (для конкретного объекта) зон, накопление обнаруженных пересечений границ активных зон объектом в течение нескольких периодов съема его текущих координат, после чего формирует сообщение об уверенном пересечении объектом слежения границ активных зон, а также принимает информацию с блока 4 приема сигналов с датчиков, сравнивает реальный сценарий изменения состояния объекта, на котором установлена следящая система, с активными шаблонами сценариев, обрабатывает совокупность характеристик, соответствующих зарегистрированным реальным сценариям. Базовые (эталонные) траектории, базовые (эталонные) сценарии, параметры зон и пороговые уровни датчиков 32 задаются внутренними установками следящей системы или внешними управляющими посылками.
В процессе функционирования следящей системы напряжения с выходов датчиков подаются на блок 4 приема сигналов с датчиков. В нем производится, при необходимости, аналого-цифровое преобразование и сравнение с пороговыми уровнями, а затем - необходимая обработка сигналов, поступающих с датчиков. Значения аргументов функций обработки значений показаний датчиков в блоке 4 можно изменять.
Получая данные от блока 1 приема и/или передачи информационных сигналов, блок 7 зонирования и сравнения сценариев обменивается данными с блоком 2 памяти для записи, изменения или удаления параметров зон и параметров сценариев. В ответ на специальные команды от источника команд и/или управляющих данных следящая система обеспечивает считывание уже установленных параметров.
С приемника излучений или с разъема (разъемов) на блок 1 приема и/или передачи информационных сигналов приходят посылки команд и/или управляющих данных в одном из определенных форматов. Излучатель (излучатели) и приемник излучений и/или разъем (разъемы) внешнего подключения следящей системы используются для работы следящей системы в различных режимах, в том числе для пусконаладочных, ремонтных работ и диагностики. Блок 1 создает кодовые посылки данных для передачи их через излучатель (излучатели) или разъем (разъемы) внешнему приемнику (приемникам) информации. В блоке 1 приема и/или передачи информационных сигналов определяется формат посылок данных и команд, а также протокол обмена информацией. Разновидность формата посылок и протокола обмена данными может определяться внутренними установками следящей системы или внешними управляющими посылками. Блок 1 приема и/или передачи информационных сигналов обнаруживает команды, предназначенные для исполнительных устройств объекта слежения, и передает эти команды блоку 5 управления исполнительными устройствами. Также блок 1 обнаруживает команды, предназначенные для блока 4 приема сигналов с датчиков, и передает ему эти команды. Имеющийся в блоке 1 приема и/или передачи информационных сигналов узел голосовой связи подключен к излучателю и приемнику излучений, разъему (разъемам), микрофону и динамику.
Блок 6 принятия решений принимает сигналы с блока 7 зонирования и сравнения сценариев, а также с блока 1 приема и/или передачи информационных сигналов и в соответствии с заданной конфигурацией работы следящей системы передает сигналы на блок 5 управления исполнительными устройствами и на дисплей. Также блок 6 формирует информацию, в соответствии с которой следящая система передает сообщения на пульт (пульты) контроля. Узел установки режимов работы следящей системы в блоке 8 настройки получает от блока 1 приема и/или передачи информационных сигналов команду о переводе следящей системы в заданный режим работы, к которым относятся «Режим настройки по умолчанию», «Режим энергосбережения», «Режим удаленной настройки», «Режим навигации», «Режим стационарного объекта» и т.д. Также, получая данные от блока 1 приема и/или передачи информационных сигналов, блок 8 настройки записывает, изменяет или удаляет параметры настройки, параметры зон и параметры сценариев. Блок 8 настройки передает параметры настройки, параметры зон и сценариев на блок 4 приема сигналов с датчиков, блок 7 зонирования и сравнения сценариев, блок 6 принятия решений, блок 1 приема и/или передачи информационных сигналов.
Также, получая данные от блока 1 приема и передачи информационных сигналов, блок 8 настройки считывает через блок 2 памяти следящей системы параметры настройки, необходимые параметры зон и параметры сценариев. Блок 8 настройки в ответ на специальные команды обеспечивает считывание уже существующих в нем установок. Настройка осуществляется внутренними установками следящей системы автономно или внешними управляющими посылками, при этом реализуются следующие виды настройки:
- настройка режима работы всей следящей системы;
- настройка блока 4 приема сигналов, поступающих с датчиков;
- настройка блока 7 зонирования и сравнения сценариев;
- настройка блока 1 приема и/или передачи информационных сигналов.
Блок 2 памяти обрабатывает, записывает во внутреннюю память следящей системы, считывает или удаляет с нее данные, как характеризующие работу объекта, на котором установлена следящая система, так и данные, необходимые для осуществления зонирования и сравнения сценариев. Внутренние часы 3 подстраиваются внешними управляющими сигналами и передают значение даты и времени на узел интерфейса приема и передачи данных блока 1 приема и/или передачи информационных сигналов. Для периодической подстройки внутренних часов 3 внешними сигналами формируются сигналы, передаваемые по линии соединения внутренних часов 3 и блока 1 приема и/или передачи информационных сигналов. Блок 4 приема сигналов с датчиков передает на узел интерфейса приема и передачи данных блока 1 значения показаний датчиков, установленных на объекте слежения. В результате синтеза данных, поступивших с приемника излучений, блока 4 приема сигналов с датчиков, внутренних часов 3, узла интерфейса приема и передачи данных блока 1, формируются информационные потоки, которые блок 2 памяти обрабатывает, записывает в память следящей системы и считывает с нее или передает через излучатель или разъем (разъемы).
На блок 7 зонирования и сравнения сценариев с узла интерфейса приема и передачи данных блока 1 передается сформированная заданным образом информация, принятая с входов приемника излучений или разъема (разъемов). Также с блока 6 принятия решений на узел формирования выходных сообщений блока 1 подаются сигналы, управляющие передачей коротких сообщений внешним приемникам. Блок 7 зонирования и сравнения сценариев, получая данные от блока 1 приема и/или передачи информационных сигналов и от блока 4 приема сигналов с датчиков, осуществляет процессы зонирования и сравнения сценариев в соответствии с сигналами настройки, поступающими от блока 8 настройки. Блок 7 зонирования и сравнения сценариев получает значения параметров активных картографических зон и активных сценариев состояния объекта с блока 2 памяти, при этом следящая система обеспечивает считывание уже установленных параметров зон и сценариев в ответ на специальные команды источника команд.
Блок 6 принятия решений принимает сигналы с блока 7 зонирования и сравнения сценариев, а также с блока 1 приема и/или передачи информационных сигналов, в соответствии с которыми передаются сигналы на блок 5 управления исполнительными устройствами и на дисплей. Также блок 6 принятия решений формирует информацию, в соответствии с которой следящая система передает сообщения на внешние приемники (например, пульт контроля). В узле обработки событий блока 6 принятия решений производится обработка результатов зонирования и сравнения сценариев, причем значения аргументов функций обработки поступают с блока 8 настройки. Результаты этой обработки в соответствии с требованиями выбранной настройки могут выводиться на экран дисплея.
В процессе проведения ремонтных и диагностических работ, а также при изменении конфигурации систем в соответствии с алгоритмом решаемой задачи оператор выполняет следующие операции.
На базовую плату 13 устанавливаются вспомогательные электронные узлы, являющиеся необходимыми комплектующими для любой конфигурации системы слежения. После этого в соответствии с вариантом выбранного алгоритма слежения определяется та совокупность электронных модулей 1-8, которая обеспечивает реализацию выбранного алгоритма. Электронные модули 1-8 устанавливаются, как уже указывалось, на боковые поверхности дополнительных фиксаторов 15, выполненных в виде плат. В зависимости от реализуемого алгоритма слежения количество дополнительных фиксаторов 15 с установленными на них электронными модулями 1-8 может быть различным, но не менее двух. При этом они могут устанавливаться как на одной стороне базовой платы 13, так и на двух ее сторонах. Дополнительные фиксаторы 15 устанавливаются на базовую плату 13 путем стыковки элементов 14 электрических разъемов базовой платы 13 с ответными элементами 16 электрических разъемов, выполненными на одной из продольных торцевых поверхностей 17 дополнительных фиксаторов 15. Неправильность установки каждого из дополнительных фиксаторов 15 на базовую плату 13 исключается вследствие того, что координаты установки элементов 14 электрических разъемов, выполненных на оборотной и лицевой сторонах базовой платы 13, и координаты установки ответных элементов 16 электрических разъемов, выполненных на дополнительных фиксаторах 15, сопряжены друг с другом.
Далее базовая плата 13 с установленными на ней дополнительными фиксаторами 15 вставляется в корпус 10, который закрывается торцевыми крышками 11 и 12. Точность установки и фиксации базовой платы 13 в корпусе 10 достигается за счет того, что базовая плата 13 взаимодействует торцевыми поверхностями с гладкими поверхностями торцевых крышек 11 и 12, выступами 19 одной из них и с пазами 18 внутренней поверхности корпуса 10. При этом продольные торцевые поверхности дополнительных фиксаторов 15 взаимодействуют с пазами 18 корпуса 10, а поперечные торцевые поверхности дополнительных фиксаторов 15 - с гладкими поверхностями торцевых крышек 11 и 12 и выступами 19 торцевой крышки 11.
При установке корпуса 10 следящей системы на объекте выбирается оптимальный вариант установки, определяемый удобством размещения и эксплуатации, свободными объемами, досягаемостью, а также возможностями скрытной установки и переустановки следящей системы. При необходимости, обусловленной выбором оптимального варианта размещения и закрепления корпуса 10 на объекте слежения, возможна переустановка базовой платы 13 в корпусе 10 посредством ее вращения относительно взаимно перпендикулярных осей, проходящих через геометрический центр базовой платы 13, с последующей переустановкой торцевых крышек 11 и 12.
Подключение следящей системы к взаимодействующими с ней устройствами, к которым в частности, относятся датчики, излучатель и приемник излучений, разъем (разъемы), микрофон, динамик, дисплей, исполнительные и другие устройства, осуществляется посредством элементов соединений и технологических отверстий 20 и 21, выполненных в торцевых крышках 11 и 12.
Использование настоящего изобретения дает возможность:
- оперативно и автономно управлять состоянием объекта, на котором установлена следящая система (без ожидания информации от внешнего источника команд и управляющих данных), в частности сравнивать реальный маршрут движения объекта и/или его состояние с заданными маршрутом и/или его состоянием и оперативно сообщать об отклонениях;
- обрабатывать информацию, соответствующую событиям различного уровня сложности, при этом на основе априорной информации оказывается возможным задание списка активных событий, требующих обработки и анализа, и следствием этого (в случаях обработки только простейших событий) является экономия собственных энергоинформационных ресурсов следящей системы, установленной на объекте;
- проводить многоуровневую и соответствующую текущему состоянию объекта адаптацию следящей системы, в том числе автономно;
- снизить объем передаваемых по каналам связи данных в зависимости от выбранных пользователем настроек и оптимально подобранного режима работы следящей системы при сохранении высокого уровня достоверности передаваемых данных и уменьшения затрат на трафик обмена.
Кроме того, настоящее изобретение при повышенных уровнях виброустойчивости и удароустойчивости обеспечивает повышение эффективности процесса эксплуатации системы слежения на объектах различных классов и решения задач, реализующих алгоритмы слежения и управления состоянием объектов. При обслуживании системы слежения, изменении ее конфигурации в соответствии с алгоритмом решаемой задачи, проведении ремонтных и диагностических работ и переустановке следящей системы на объекте слежения с учетом ее наиболее рационального размещения существенно сокращается время работы оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТАМИ И УПРАВЛЕНИЯ ИХ СОСТОЯНИЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2006 |
|
RU2297673C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ПЕРЕДВИЖЕНИЯ ПЕРСОНАЛА | 2010 |
|
RU2442220C1 |
| СИСТЕМА КОМПЛЕКСНОГО МОНИТОРИНГА КЛИМАТА | 2022 |
|
RU2787073C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| Плата-переходник для установки в базовые устройства с процессорным модулем форм-фактора COM EXPRESS | 2024 |
|
RU2838350C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| Мишенный комплекс и способ управления им | 2019 |
|
RU2722515C1 |
| УСТРОЙСТВО НАКОПЛЕНИЯ И ОБРАБОТКИ ИНФОРМАЦИИ | 1994 |
|
RU2046397C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
Изобретение относится к технике слежения за мобильными и стационарными объектами и дистанционного управления их состоянием. Система содержит электронные модули: блок приема и/или передачи информационных сигналов, блок памяти, внутренние часы, блок приема сигналов с датчиков, блок управления исполнительными устройствами, блок принятия решений, блок зонирования и сравнения сценариев и блок настройки. С помощью электронных модулей, электрически соединенных между собой, реализуется алгоритм слежения за объектами и управления их состоянием. В системе также имеются: корпус с торцевыми крышками, базовая плата со вспомогательными электронными узлами, фиксаторы, установленные на базовой плате и выполненные в виде элементов разъемов, дополнительные фиксаторы, установленные перпендикулярно базовой плате и выполненные в виде плат с ответными элементами разъемов. Все стороны внутренней поверхности корпуса выполнены с продольными пазами, одна из крышек на одной ее стороне выполнена с выступами по периметру, а другая - гладкой. Базовая плата взаимодействует торцевыми поверхностями с гладкими поверхностями крышек, выступами одной из них и с пазами внутренней поверхности корпуса. Дополнительные фиксаторы взаимодействуют продольными торцевыми поверхностями с пазами корпуса, поперечными торцевыми поверхностями - с гладкой поверхностью одной и гладкой поверхностью и выступами другой крышки. Базовая плата установлена, а торцевые крышки выполнены с возможностью переустановки. Электронные модули установлены на боковых поверхностях дополнительных фиксаторов. Изобретение обеспечивает оперативное и автономное управление состоянием объектов в условиях проведения многоуровневой и соответствующей текущему состоянию объекта адаптации следящей системы. Эффективность следящей системы увеличивается за счет повышения виброустойчивости, удароустойчивости и ремонтопригодности. 3 ил.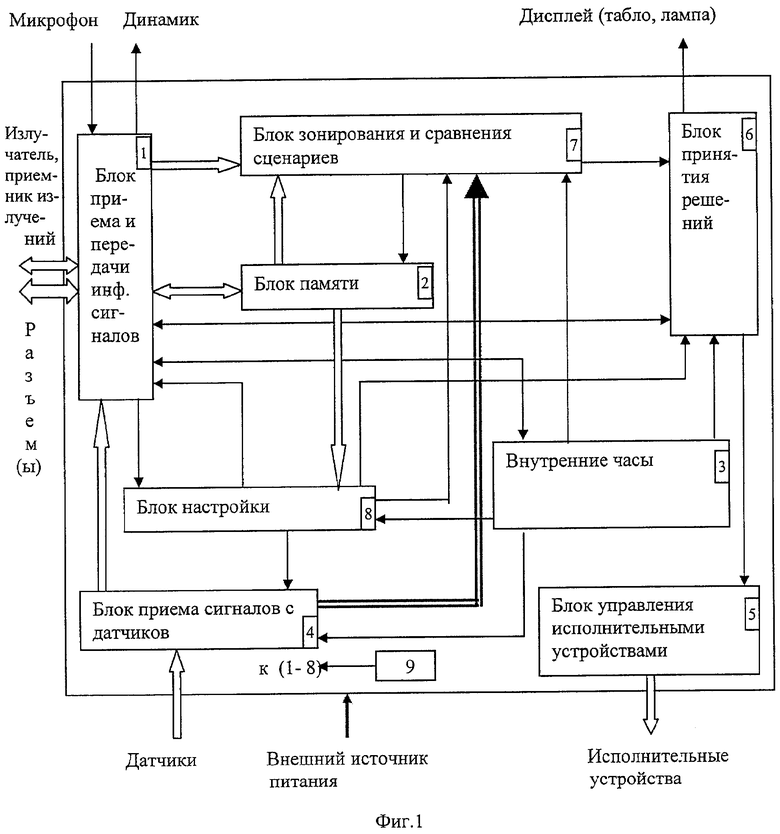
Система для слежения за объектами и управления их состоянием, содержащая функциональные электронные модули: блок приема и/или передачи информационных сигналов, блок памяти, внутренние часы, блок приема сигналов с датчиков, блок управления исполнительными устройствами, блок принятия решений, блок зонирования и сравнения сценариев и блок настройки,
блок приема и/или передачи информационных сигналов соединен с блоком памяти, внутренними часами, блоком приема сигналов с датчиков, блоком принятия решений, блоком зонирования и сравнения сценариев и блоком настройки, блок памяти соединен с блоком зонирования и сравнения сценариев и блоком настройки, внутренние часы соединены с блоком зонирования и сравнения сценариев, блоком принятия решений, блоком приема сигналов с датчиков и блоком настройки, блок приема сигналов с датчиков соединен с блоком зонирования и сравнения сценариев и блоком настройки, блок принятия решений соединен с блоком управления исполнительными устройствами, блоком зонирования и сравнения сценариев и блоком настройки, блок зонирования и сравнения сценариев соединен с блоком настройки,
блок приема и/или передачи информационных сигналов, блок приема сигналов с датчиков, блок принятия решений и блок управления исполнительными устройствами выполнены с возможностью подключения к непосредственно взаимодействующим с системой устройствам, к которым относятся датчики, излучатель и приемник излучений, разъем, микрофон, динамик, дисплей, исполнительные устройства и отдельный источник питания,
при этом имеются:
корпус с торцевыми крышками, базовая плата со вспомогательными электронными узлами, фиксаторы, установленные, по крайней мере, на одной стороне базовой платы и выполненные в виде элементов электрических разъемов, дополнительные фиксаторы в количестве, не менее двух, установленные перпендикулярно базовой плате, по крайней мере, с одной ее стороны и выполненные в виде плат с ответными элементами электрических разъемов на одной из продольных торцевых поверхностей, координатно сопрягаемыми с соответствующими элементами электрических разъемов на базовой плате,
все стороны внутренней поверхности корпуса выполнены с продольными пазами по всей длине каждой стороны, одна из торцевых крышек корпуса на одной ее стороне выполнена с выступами по периметру, а другая - гладкой,
базовая плата выполнена с возможностью взаимодействия торцевыми поверхностями с гладкими поверхностями торцевых крышек корпуса, выступами одной из них и с пазами внутренней поверхности корпуса,
дополнительные фиксаторы выполнены с возможностью взаимодействия продольными торцевыми поверхностями с пазами корпуса, поперечными торцевыми поверхностями - с гладкой поверхностью одной и гладкой поверхностью и выступами другой торцевой крышки корпуса,
базовая плата установлена с возможностью переустановки путем вращения относительно взаимно перпендикулярных осей, проходящих через ее геометрический центр, торцевые крышки корпуса выполнены также с возможностью переустановки,
упомянутые выше функциональные электронные модули установлены на боковых поверхностях дополнительных фиксаторов.
| ЛАБОРАТОРНЫЙ СМЕСИТЕЛЬ | 2009 |
|
RU2417118C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| БОРТОВОЙ КОМПЛЕКС ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2280899C2 |

