Изобретение относится к мишенным комплексам, а именно к программируемым мишенным комплексам для тренировки и подготовки к стрельбе и способам управления мишенными комплексами.
Известна конструкция по патенту RU 2 431 799 «Система управления появляющейся мишенью» с приоритетом от 20.10.2011, предназначенная для приобретения практических навыков в прицельной стрельбе по мишеням из любых видов стрелкового оружия, содержащая командный пункт, взаимосвязанные между собой пульт управления, устройство отображения и документирования, командный пункт соединен с объектом управления мишенью с помощью канала связи, пульт управления содержит формирователь команд управления, формирователь запросов состояния механизма управления, соединенных с приемопередатчиком.
Известна система управления появляющейся мишенью по патенту RU 2 527 309 «Система управления появляющейся мишенью» с приоритетом от 27.08.2014, предназначенная для дистанционно-управляемых тренажеров для стрельбы, содержащая командный пункт с пультом управления и устройством отображения и документирования, управляемой мишенной установки на платформе с размещенными на ней приемопередатчиком, устройством сопряжения, электронным блоком управления, подъемным механизмом, автономным источником питания, зарядным устройством, бесконтактные датчики попадания и блоки световой и звуковой имитации.
Недостатками вышеуказанных конструкций и систем управления появляющейся мишенью является отсутствие возможности автоматической расстановки мишеней на электронной карте упражнения и/или отслеживание перемещений мишеней при движении в соответствии с географическими координатами мишенных установок на карте упражнения, ограниченность в возможности составления стрелковых упражнений с учетом местонахождения и перемещения пользователей и мишенных установок и контроля положения пользователя или группы пользователей, мишеней или группы мишеней при выполнении упражнения.
Задачей предлагаемого мишенного комплекса является расширение функциональных возможностей создания стрелковых упражнений с использованием мишенного комплекса.
Технический результат достигается за счет использования мишенного комплекса, в состав которого входят мишенные установки с устройствами дистанционного управления, оснащенные приемниками географических координат, индикаторы местонахождения пользователей, связанные с пунктом управления, а также способом использования мишенного комплекса, при котором формируют стрелковые упражнения с учетом местоположения и перемещения пользователей, оснащенных индикаторами местонахождения пользователей, и мишенных установок, при этом контролируется положение пользователей и мишенных установок при выполнении упражнения.
Поставленная задача достигается за счет управления мишенным комплексом, заключающимся в размещении на полигоне мишенных установок, имеющих модуль дистанционного управления, в размещении передатчика сигналов в оптимальных условиях передачи сигнала с возможностью связи с модулями дистанционного управления мишенных установок и с пунктом управления, при этом мишенные установки размещают с возможностью изменения их местоположения, передают данные об их географическом положении на пункт управления, отображают их расположение на карте пункта управления, далее отслеживают изменение положения мишенных установок с учетом изменения ситуационных условий. Также дополнительно отслеживают местоположение пользователя по его географическим координатам и учитывают эти данные при изменении ситуационных условий. При этом устойчивый сигнал управления между устройствами комплекса обеспечивают схемой ретрансляции сигнала управления, формируемой с учетом взаимного расположения устройств комплекса и уровня сигнала между ними. Также решение поставленной задачи достигается тем, что мишенный комплекс состоит из набора мишенных установок с модулями дистанционного управления, передатчика сигналов и пункта управления, индикатора местонахождения пользователя, взаимодействующих между собой по каналу связи, при этом индикатор местонахождения пользователя включает в себя приемник географических координат спутниковых навигационных систем и приемопередающее устройство, а модули дистанционного управления мишенных установок снабжены приемниками географических координат спутниковых навигационных систем, выполнены в виде самостоятельных блоков, не оказывающих влияние на работоспособность мишенных установок. При этом мишенная установка имеет панель управления для настройки режима работы мишенной установки. Также мишенная установка может быть установлена как в вертикальном, так и в горизонтальном положении.
Состав мишенного комплекса, конструкция устройства, элементы мишенного комплекса представлены на фигурах 1 - 10.
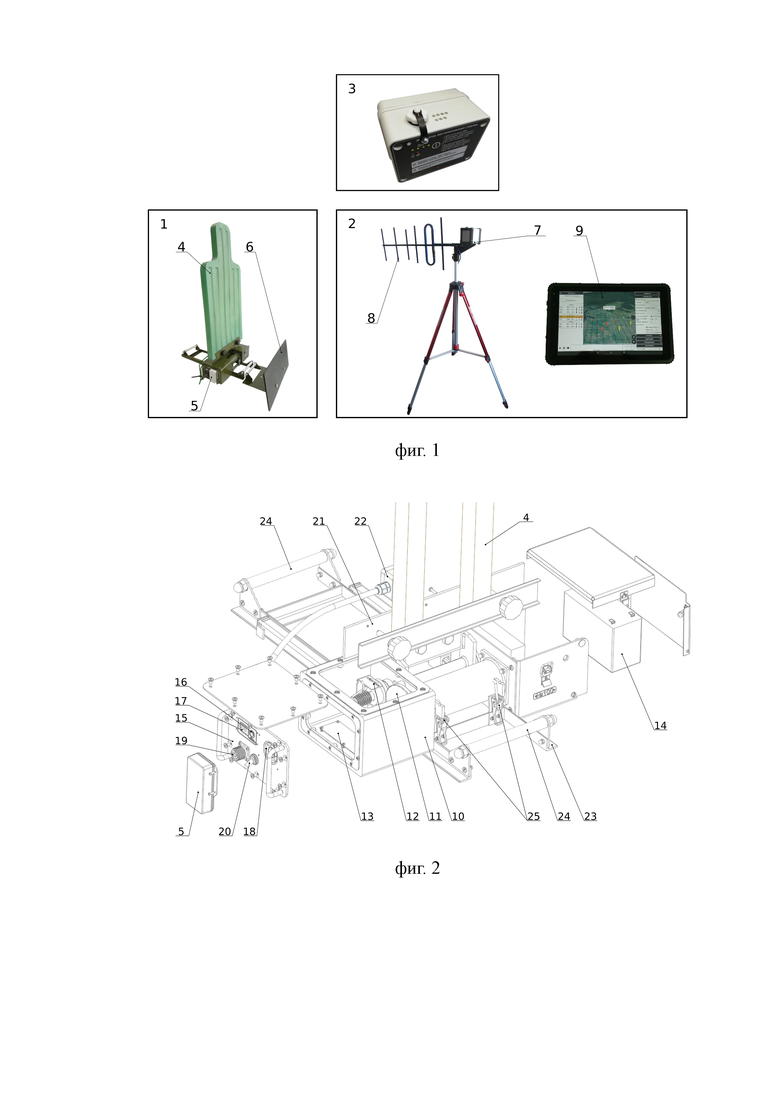
На фиг. 1 представлен состав мишенного комплекса.
На фиг. 2 изображена схема мишенной установки.
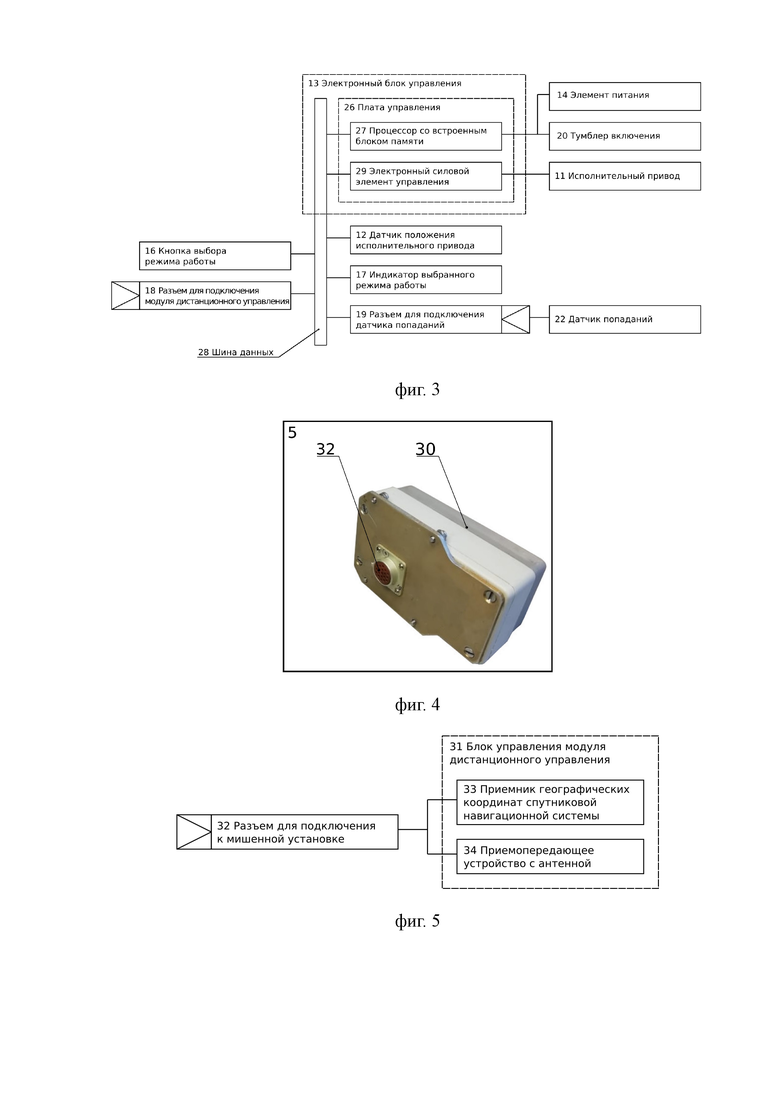
На фиг. 3 изображена функциональная схема мишенной установки.
На фиг. 4 изображен общий вид модуля дистанционного управления.
На фиг. 5 изображена функциональная схема модуля дистанционного управления.
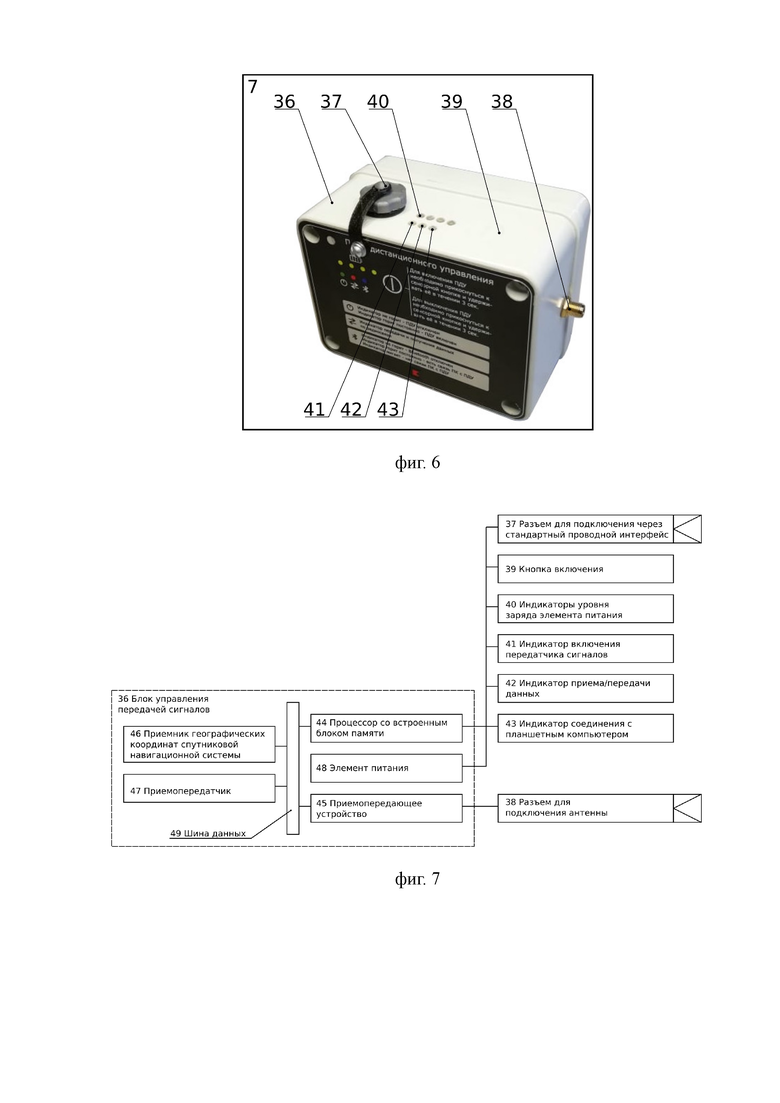
На фиг. 6 представлен общий вид передатчика сигналов.
На фиг. 7 изображена функциональная схема передатчика сигналов.
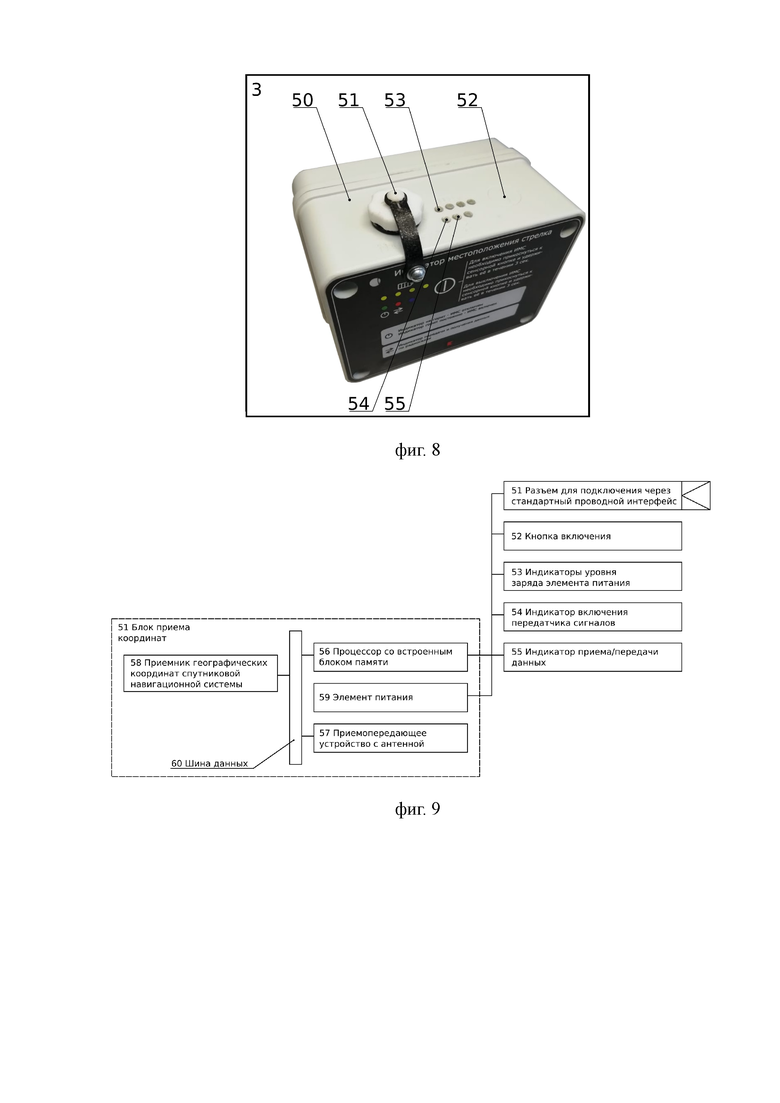
На фиг. 8 представлен общий вид индикатора местонахождения пользователя.
На фиг. 9 изображена функциональная схема индикатора местонахождения пользователя.
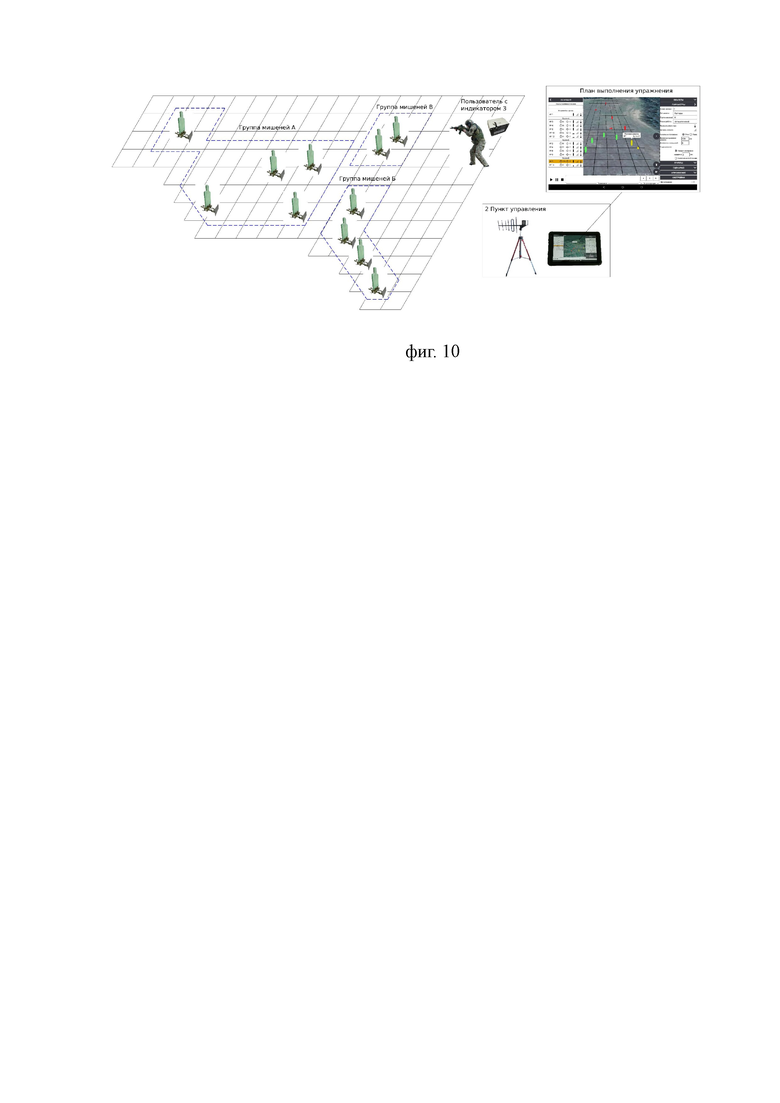
На фиг. 10 изображен пример размещения мишенного комплекса.
Мишенный комплекс, изображенный на фиг. 1, состоит из набора мишенных установок 1, которые управляются с пункта 2 управления, и индикатора 3 местонахождения, находящегося у пользователя.
Мишенная установка 1 содержит щит 4 мишени, модуль 5 дистанционного управления, а также бронещит 6.
Пункт 2 управления, изображенный на фиг. 1, состоит из передатчика 7 сигналов с антенной 8, а также планшетного компьютера 9.
Мишенная установка 1, изображенная на фиг. 2, состоит из корпуса 10, в котором расположены исполнительный привод 11, датчик 12 положения исполнительного привода 11, электронный блок 13 управления, элемент питания 14. На корпусе 10 расположена панель 15 управления с кнопкой 16 выбора режима работы, с индикатором 17 выбранного режима работы, с разъемом 18, с разъемом 19 для подключения датчика попаданий и тумблером 20 включения.
К корпусу 10 шарнирно закреплен фиксатор 21 щита 4, связанный с исполнительным приводом 11 с помощью зубчатой передачи. При этом на фиксаторе 21 установлен с помощью винтового зажима щит 4 мишени, а также установлен с помощью винтового соединения датчик 22 попаданий, электрически соединенный с разъемом 19.
Опора 23 мишенной установки 1 выполнена в виде рамы, на которой установлены ручки 24 для переноски мишенной установки, защелки 25 для крепления корпуса 10. В опоре 23 мишенной установки выполнены отверстия (не показаны) в основании для фиксации на поверхности, например, на бетонном основании, грунте, к стене и т. д.
Корпус 10 установлен на опору 23 с помощью разъемного соединения в пазы (не показаны) и закреплен с помощью защелок 25.
Электронный блок 13 управления, функциональная схема которого приведена на фиг. 3, выполнен в виде платы 26 управления, на которой расположен процессор 27 со встроенным блоком памяти, соединенный шиной 28 данных с электронным силовым элементом 29 управления. Процессор 27 соединен шиной 28 данных с датчиком 12 положения, кнопкой 16, индикатором 17, разъемом 18, разъемом 19 и электрически соединен с тумблером 20 и с элементом питания 14; а электронный силовой элемент 29 электрически соединен с исполнительным приводом 11.
Модуль 5 дистанционного управления, изображенный на фиг. 4, состоит из корпуса 30, в котором расположен блок 31 управления. На корпусе 30 расположен разъем 32 для подключения к разъему 18 мишенной установки 1.
Блок управления 31 модуля 5 дистанционного управления, функциональная схема которого приведена на фиг. 5, содержит приемник 33 географических координат спутниковой навигационной системы и приемопередающее устройство 34 с антенной, при этом приемник 33 и приемопередающее устройство 34 электрически соединены с разъемом 32.
Передатчик 7 сигналов, изображенный на фиг. 6, состоит из корпуса 35, в котором установлен блок 36 управления передачей сигналов. На корпусе 35 расположены разъем 37 с заглушкой для подключения через стандартный проводной интерфейс, например, USB, разъем 38 для подключения антенны 8, кнопка 39 включения, и световые индикаторы: четыре индикатора 40 для отображения уровня заряда, индикатор 41 включения передатчика 7, индикатор 42 приема/передачи данных и индикатор 43 соединения с планшетным компьютером 9.
Блок 36 управления передачей сигналов, функциональная схема которого приведена на фиг.7, содержит процессор 44 со встроенным блоком памяти, приемопередающее устройство 45, приемник 46 географических координат спутниковой навигационной системы, приемопередатчик 47 для беспроводной связи с планшетным компьютером 9, например, по интерфейсу связи Bluetooth, и элемент питания 48. Процессор 44 соединен шиной 49 данных с приемопередающим устройством 45, приемником 46 географических координат спутниковой навигационной системы, приемопередатчиком 47, электрически соединен с разъемом 37, индикаторами 40, 41, 42, 43, кнопкой 39 и с элементом питания 48, а приемопередающее устройство 45 электрически связано с разъемом 38.
Индикатор 3 местонахождения пользователя, изображенный на фиг. 8, состоит из корпуса 50, в котором установлен блок 51 приема координат. На корпусе 50 расположены разъем 51 с заглушкой для подключения через стандартный проводной интерфейс, например, USB, кнопка 52 включения, световые индикаторы: четыре индикатора 53 для отображения уровня заряда, индикатор 54 включения индикатора 3 местонахождения пользователя и индикатор 55 приема/передачи данных.
Блок 51 приема координат, функциональная схема которого приведена на фиг. 9, содержит процессор 56 со встроенным блоком памяти, приемопередающее устройство 57 с антенной, приемник 58 географических координат спутниковой навигационной системы и элемент питания 59. При этом процессор 56 соединен шиной 60 данных с приемопередающим устройством 57, приемником 58 географических координат спутниковой навигационной системы, электрически соединен с разъемом 51, индикаторами 53, 54, 55, кнопкой 52 и элементом питания 59.
Мишенный комплекс работает следующим образом.
Мишенная установка 1 может работать как в режиме радиоуправления, так и в автономном режиме. При отсутствии подключенного модуля 5 дистанционного управления мишенная установка 1 работает только в автономном режиме.
Модуль 5 дистанционного управления подключают с помощью разъема 32 к разъему 18 мишенной установки 1 и закрепляют к корпусу 10, например, с помощью винтов, при этом разъем 32 и разъем 18 выполнены, например, в виде разъемов врубного типа. При подключенном модуле 5 дистанционного управления к мишенной установке 1 процессор 27 соединен посредством шины 28 данных через разъемы 18 и 32 с приемником географических координат 33, а также с приемопередающим устройством 34 и управляет процессом приема, передачи и обработки сигналов управления. Процессор 27 хранит во встроенном блоке памяти управляющую программу для обеспечения работы в режиме радиоуправления и в автономном режиме. Процессор 27 по принятому сигналу управления от пункта 5 управления выполняет действия согласно программе управления. Без модуля 5 дистанционного управления разъем 18 закрывается заглушкой (не показана) для предотвращения загрязнения разъема.
Переключение между временными отсечками для поднятия щита 4 мишени и для выбора режима управления осуществляют кратковременным нажатием, например, менее 1 сек на кнопку 16 выбора режима работы, при этом индикатор 17 отображает информацию о выбранной временной отсечке подъема фиксатора 21 и о режиме радиоуправления. Индикатор 17 выбранного режима работы выполнен, например, в виде дисплея. Кнопка 16 выбора режима работы выполнена, например, в виде мембранной клавиатуры с кнопкой и индикатором 17.
Процессор 27 через шину 28 данных получает информацию от датчика 22 о попадании в щит 4 мишени, от датчика 12 получает информацию о положении исполнительного привода 8. В качестве датчика 22 попаданий используют обкладочный или вибрационный датчик попаданий. В качестве датчика 12 положения, например, используют датчик Холла. Процессор 27 ведет учет количества подъемов и опусканий фиксатора 18, количества попаданий в щит мишени 2, времени работы исполнительного привода 8, уровня заряда элемента питания 11, уровня мощности сигнала управления при работе приемопередающего устройства 34 и географические координаты при работе приемника географических координат 33.
Мишенную установку 1 размещают либо горизонтально, либо вертикально для поворота щита 4 мишени, либо в горизонтальной, либо в вертикальной плоскости соответственно в зависимости от требования выполнения упражнения. При размещении мишенной установки 1 в горизонтальном положении выполняют горизонтальную установку корпуса 10 выступами корпуса мишенной установки в пазы опоры 23 и фиксируют положение корпуса 10 защелками 25. Размещение мишенной установки 1 в вертикальном положении выполняют аналогичным образом, устанавливая корпус 10 вертикально.
Процессор 44 передатчика 7 сигналов обрабатывает и транслирует сигналы управления между приемопередатчиком 47 и приемопередающим устройством 45 или между стандартным проводным интерфейсом разъема 37 и приемопередающим устройством 45. Процессор 44 также ведет учет времени работы, уровня заряда элемента питания 48 и уровня мощности передачи сигнала управления приемопередающего устройства 45. Программирование процессора 44 осуществляется через разъем 44.
Включение и выключение передатчика 7 сигналов осуществляют длительным, например, 3 секунды, нажатием на кнопку 39 включения, выполненную, например, в виде сенсорной кнопки. Проверку уровня заряда элемента питания 48 передатчика 7 сигналов осуществляют с помощью индикаторов 40. Индикаторы 40 отображают уровень заряда элемента питания 48 при коротком, однократном, например, менее 1 секунды, нажатии на кнопку 39. Индикатор 41 включения загорается при включении передатчика 7 сигналов. Индикатор 42 приема/передачи данных при приеме или передаче сигналов управления мерцает. Индикатор 43 индицирует следующие состояния: при отсутствии соединения с планшетным компьютером 9 индикатор 43 мерцает, при наличии соединения индикатор 43 горит постоянно.
Процессор 56 индикатора 3 местонахождения пользователя получает через шину 60 данных от приемника географических координат 58 текущие географические координаты, а также ведет учет времени работы, уровня заряда элемента питания 59 и уровня мощности передачи сигнала управления приемопередающего устройства 57. Процессор 56 по принятому сигналу управления от пункта 2 управления выполняет действия согласно программе управления. Программирование процессора 56 осуществляется через разъем 51.
Включение и выключение индикатора 3 местонахождения пользователя осуществляют длительным, например, 3 секунды, нажатием на кнопку 52 включения, выполненную, например, в виде сенсорной кнопки. Проверку уровня заряда элемента питания 59 индикатора 3 местонахождения пользователя осуществляют с помощью индикаторов 53. Индикаторы 53 отображают уровень заряда элемента питания 59 при коротком, однократном, например, менее 1 секунды, нажатии на кнопку 52. Индикатор 54 включения загорается при включении индикатора 3 местонахождения пользователя. Индикатор 55 приема/передачи данных при приеме или передаче сигналов управления мерцает.
Передача сигналов управления между передатчиком сигналов 7 и планшетным компьютером 9 осуществляется либо с помощью стандартного проводного интерфейса связи, например, USB, либо с помощью стандартного беспроводного интерфейса связи, например, Bluetooth. При этом пункт 2 управления осуществляет управление набором мишенных установок 1 в условиях одновременной работы нескольких пунктов управления за счет использования различных каналов радиосвязи. Связь пункта 2 управления с индикаторами 3 местонахождения пользователей и с мишенными установками 1 с установленным модулями 5 дистанционного управления осуществляется через прямую передачу сигнала управления либо через ретрансляцию сигнала управления через устройства управления, при этом выбор маршрута ретрансляции выполняется вручную или автоматически на основании данных о качестве сигнала между устройствами для обеспечения оптимальных условий передачи сигнала.
На дисплее планшетного компьютера 9 отображается информация: электронная карта местности, электронные кнопки запуска, паузы, остановки и тестирования упражнения, а также панель настройки параметров, включающая параметры настроек мишенных установок, параметры настроек сценария, параметры настроек упражнения и общие настройки. В качестве планшетного компьютера может быть использован планшетный компьютер или смартфон с операционной системой «Android».
С использованием планшетного компьютера 9 задают сценарий стрелкового упражнения: создают группы мишенных установок, настраивают параметры каждой мишенной установки и групп мишенных установок, последовательность подъема и опускания щитов мишени и групп щитов мишени в зависимости от различных условий. При этом предусмотрено внесение изменений в ходе выполнения упражнений, например, поднятие определенных щитов мишеней или группы щитов мишеней по команде оператора, формируемой на планшетном компьютере 9.
Пункт 2 управления в режиме реального времени отображает на дисплее планшетного компьютера 9 географические координаты спутниковой навигационной системы, полученные с мишенных установок 1, оснащенных модулями 5 дистанционного управления, и индикаторов 3 местонахождения пользователей на электронной карте местности. Пункт 2 управления ведет запись процесса выполнения упражнения с записью состояния мишенных установок 1 и ситуационных условий. По результатам выполнения упражнения планшетный компьютера 9 формирует и отображает на дисплее отчет о результатах выполнения упражнения.
Пункт управления 2 обеспечивает выполнение упражнений по заранее заданной программе с учетом расположения и перемещения пользователей, оснащенных индикаторами 3, а также с учетом расположения и перемещения мишенных установок 1 с установленными модулями 5 дистанционного управления.
Также пункт управления 2 через канал связи запрашивает информацию и с помощью планшетного компьютера 9 формирует и отображает отчеты и предупреждения о техническом состоянии мишенных установок 1 и индикаторов 3 местонахождения пользователей 3: наработка в часах, состояние элементов питания, выбранный уровень мощности передачи сигнала, качество передачи сигнала, выбранный канал связи, для мишенных установок: текущее положение щита мишени, географические координаты мишенной установки и т.д.
При подготовке мишенного комплекса размещают на местности мишенные установки 1 с щитами 4 мишеней согласно плану выполнения упражнения, пример размещения мишенного комплекса приведен на фиг. 10. Затем с помощью пункта управления 2 производят установку и проверку связи с мишенными установками 1, после этого размещают мишенные установки 1 на электронной карте местности на дисплее планшетного компьютера 9 вручную или на основании географических координат от спутниковой навигационной системы, назначают группы и блоки мишенных установок 1 согласно плану упражнения.
При настройке мишенного упражнения для каждой мишенной установки 1 назначают порядковый номер, тип щита 4 мишени, принадлежность к группе мишеней, а также режим работы, устанавливают различные способы срабатывания мишенных установок: срабатывание после определенного количества попаданий, срабатывание после каждого попадания; время на поражение щита 4 мишени. Также при настройке мишенного упражнения определяют последовательность подъема и опускания щитов мишеней и групп щитов мишеней в зависимости от различных условий. Проверку работы мишенного комплекса выполняют запуском упражнений либо для каждой мишенной установки 1 в отдельности, либо для всего мишенного комплекса, с помощью планшетного компьютера 9.
Преимуществами предлагаемого мишенного комплекса является введение новых качественных характеристик в стрелковые упражнения: динамичность, реалистичность событий, управление на стадии выполнения упражнения, введение фактора неожиданности при выполнении стрелковых упражнений за счет контроля изменения положения мишенных установок и пользователей при выполнении стрелковых упражнений, составленных с учетом их перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2670395C1 |
| ДАТЧИК ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2488855C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЯВЛЯЮЩЕЙСЯ МИШЕНЬЮ | 2013 |
|
RU2527309C1 |
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228542C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| ОХРАННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2229398C1 |
| ПОДВИЖНАЯ АВТОМАТИЗИРОВАННАЯ МАШИНА СВЯЗИ И УПРАВЛЕНИЯ РОБОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2021 |
|
RU2762624C1 |
Изобретение направлено на создание мишенного комплекса с мишенными установками, имеющими устройства дистанционного управления, а также оснащенные приемниками географических координат, индикаторы местонахождения пользователей, связанные с пунктом управления. Управление комплексом осуществляют путем формирования стрелковых упражнений с учетом местоположения и перемещения пользователей, оснащенных индикаторами местонахождения пользователей, и мишенных установок, при этом контролируется положение пользователей и мишенных установок при выполнении упражнений. Мишенный комплекс состоит из набора мишенных установок, которые управляются с пункта управления, и индикатора местонахождения, находящегося у пользователя. Каждая мишенная установка состоит из щита модуля дистанционного управления, а также бронещита. Пункт управления состоит из передатчика сигналов с антенной, а также планшетного компьютера. Расширяются функциональные возможности создания стрелковых упражнений с использованием мишенного комплекса. 2 н. и 5 з.п. ф-лы, 10 ил.
1. Способ управления мишенным комплексом, заключающийся в размещении на полигоне мишенных установок, имеющих модуль дистанционного управления, в размещении передатчика сигналов в оптимальных условиях передачи сигнала с возможностью связи с модулями дистанционного управления мишенных установок и с пунктом управления, отличающийся тем, что мишенные установки размещают с возможностью изменения их местоположения, передают данные об географическом положении на пункт управления, отображают их расположение на пункте управления, далее отслеживают изменение положения мишенных установок с учетом изменения ситуационных условий.
2. Способ управления мишенным комплексом по п.1, отличающийся тем, что дополнительно отслеживают местоположение пользователя по его географическим координатам и учитывают эти данные при изменении ситуационных условий.
3. Способ управления по п.1, отличающийся тем, что устойчивый сигнал управления между устройствами комплекса обеспечивают схемой ретрансляции сигнала управления, формируемой с учетом взаимного расположения устройств комплекса и уровня сигнала между ними.
4. Мишенный комплекс, состоящий из набора мишенных установок с модулями дистанционного управления, пункта управления с передатчиком сигналов, взаимодействующих между собой по каналу связи, отличающийся тем, что дополнительно введен индикатор местонахождения пользователя, взаимодействующий с другими устройствами мишенного комплекса, включающий приемник географических координат спутниковых навигационных систем и приемопередающее устройство, а модули дистанционного управления мишенных установок снабжены приемниками географических координат спутниковых навигационных систем.
5. Комплекс по п.4, отличающийся тем, что модуль дистанционного управления мишенной установки выполнен в виде самостоятельного блока, не оказывающего влияние на работоспособность всей установки.
6. Комплекс по п.4, отличающийся тем, что мишенные установки устанавливают как в вертикальном, так и в горизонтальном положении.
7. Комплекс по п.4, отличающийся тем, что мишенная установка содержит панель управления для выбора режима работы мишенной установки.
| Способ управления перемещением подвижной мишени и устройство для его осуществления | 2016 |
|
RU2620245C1 |
| МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2670395C1 |
| "Ратник" - российская боевая экипировка, ссылка https://forma-odezhda.ru/encyclopedia/ratnik-ekipirovka/ найдена в сети интернет 09.01.2020, размещение в интернете согласно | |||

