Предлагаемое изобретение относится к измерительной технике, в частности к навигационным гироскопическим приборам, и может найти применение в системах навигации подвижных объектов, в автопилотах авиа-судомоделей и мобильных комплексов авианаблюдений.
Известен бесплатформенный инерциальный измерительный блок, в котором в качестве инерциальных датчиков - гироскопов и акселерометров применены микромеханические вибрационные гироскопы-акселерометры, содержащие чувствительные элементы, электроды возбуждения колебаний чувствительных элементов и электроды съема информации, при этом основание блока выполнено в виде параллелепипеда с базовыми плоскостями по его граням и внутренней полостью, электроды возбуждения колебаний чувствительных элементов и электроды съема информации выполнены непосредственно на основании, а основание закреплено на подложке, содержащей микросборки сервисной электроники, в полости основания размещен источник постоянного тока, а на одной из плоскостей основания установлен датчик температуры (см. патент РФ №2058534, МКИ G 01 С 21/00, 1993 г.).
Недостатками данного бесплатформенного инерциального блока являются ограничения по функциональным возможностям, так как для использования в системах навигации при длительных режимах работы требуется интеграция его с датчиком положения спутниковой навигационной системы и другими датчиками.
Наиболее близким аналогом предлагаемых изобретений является бесплатформенный инерциальный измерительный блок, содержащий защитный корпус с двусторонней разводкой выводов микросборок сервисной электроники в плоскости, параллельной плоскости большей торцевой грани основания с размещенными на других его гранях микромеханическими гироскопами и акселерометрами, а также датчиком температуры, причем в корпусе размещена плата из диэлектрика, на которой закреплено указанное основание и схема обработки измерительной информации с чувствительных элементов (см. патент РФ №2162203, МКИ G 01 С 21/00, 2000 г.).
Недостатком данного бесплатформенного инерциального блока, помимо указанных выше ограничений функциональных возможностей, являются одновременное использование гибридной технологии с повышенными технологическими требованиями к изготовлению и эксплуатации основания-пирамиды и тонкопленочных элементов, что приводит к ограничению его использования из-за различных диапазонов эксплуатационных требований.
Техническим результатом предлагаемого изобретения является расширение функциональных и эксплуатационных возможностей прибора.
Указанный технический результат достигается тем, что в известном навигационном приборе на основе микромеханических чувствительных элементов, содержащем защитный корпус с выводами, в котором размещены интегрированная бесплатформенная инерциальная навигационная система с микромеханическими чувствительными элементами и платой чувствительных элементов со схемой обработки информации с чувствительных элементов, в его корпус введены, по меньшей мере, две дополнительные платы, связанные с платой чувствительных элементов и/или между собой установочными элементами электромеханического монтажа, при этом первая дополнительная плата выполнена в виде платы приемопередатчика с антенной приема и передачи данных с наземной станции слежения, а вторая - в виде платы приемника спутниковой навигации с соответствующей спутниковой антенной, причем защитный корпус снабжен радиопрозрачной крышкой, а с наружной стороны корпуса выполнены полость для размещения аккумулятора и установочные выступы с магнитными опорами для закрепления на движущемся объекте.
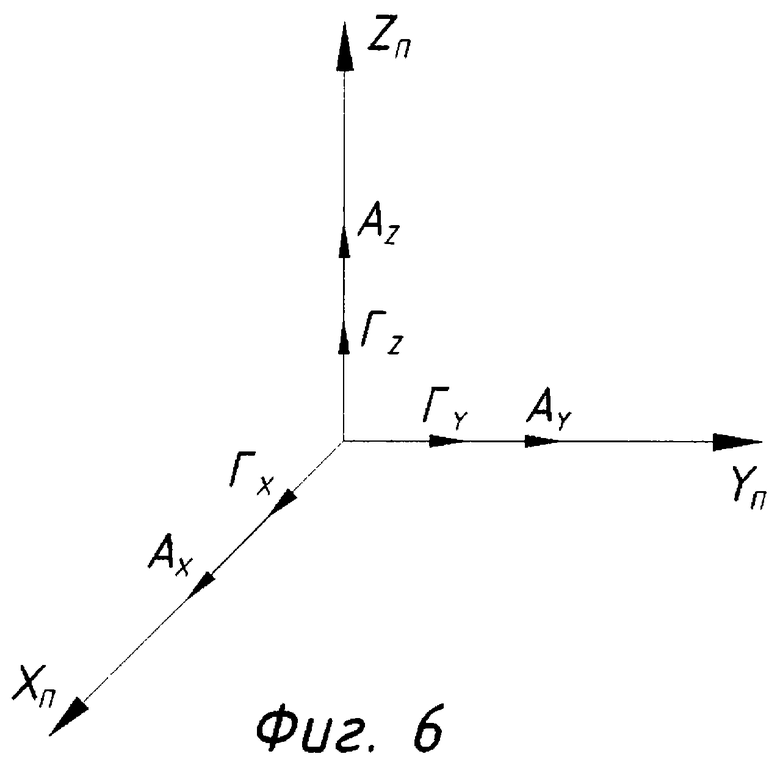
Кроме того, для достижения указанного технического результата этим прибором создана унифицированная интегрированная бесплатформенная инерциальная навигационная система, содержащая размещенные в корпусе микромеханические гироскопы и акселерометры, плату чувствительных элементов и схему обработки информации с чувствительных элементов, отличающаяся тем, что в нее введены плата микроконтроллера бесплатформенного инерциального блока (БИБ), плата микроконтроллера бесплатформенной инерциальной навигационной системы (БИНС) и, по меньшей мере, две платы микромеханических гироскопов и/или акселерометров, установленные перпендикулярно плате чувствительных элементов и жестко скрепленные с ней с образованием правой системы координат осей чувствительности микромеханических гироскопов и акселерометров, при этом платы микроконтроллеров БИБ и БИНС установлены параллельно плате чувствительных элементов и прикреплены друг к другу и корпусу посредством полых амортизационных электроизолирующих втулок и винтов, проходящих через сквозные отверстия в платах и этих втулках.
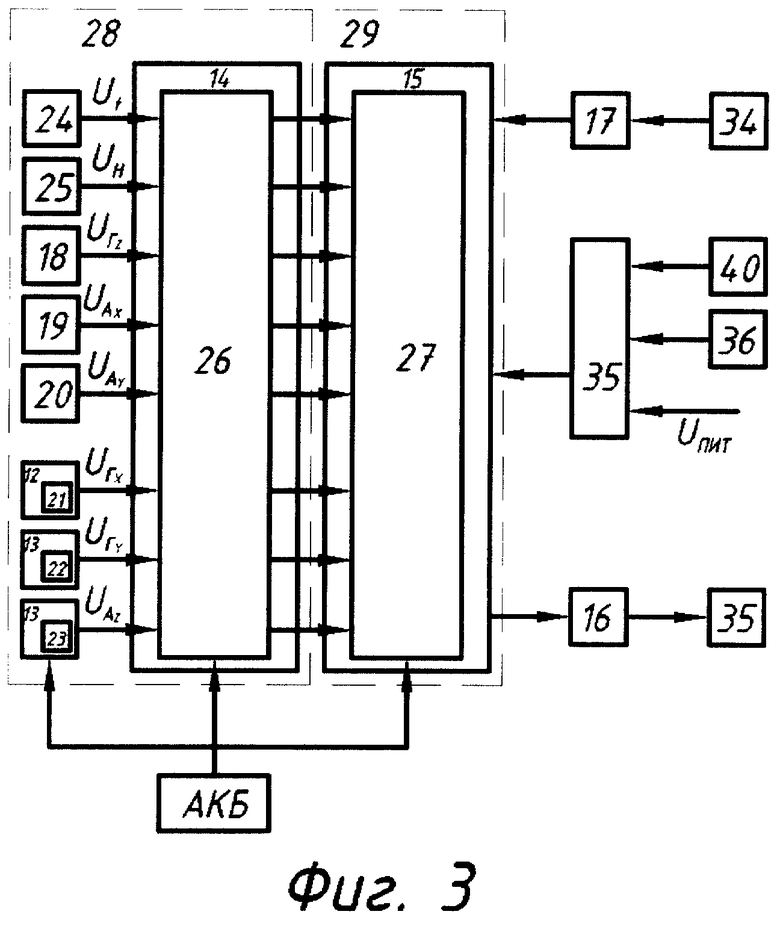
Кроме того, схема обработки информации с чувствительных элементов содержит по три микромеханических акселерометра и гороскопа, датчик напряжения питания и датчик температуры, подключенные ко входам микроконтроллера БИБ, выходы которого подключены ко входам микроконтроллера БИНС, который гальванически связан со спутниковой антенной, антенной приема и передачи данных с наземной станции слежения, соответственно, платой модуля приемника спутниковой навигационной системы, платой модуля приемопередатчика, а также с альтиметром и/или одометром - электрическим разъемом, при этом чувствительные элементы и микроконтроллеры подключены к аккумулятору.
На фиг.1 представлен общий вид универсального навигационного прибора управления движением, выполненного в корпусном исполнении.
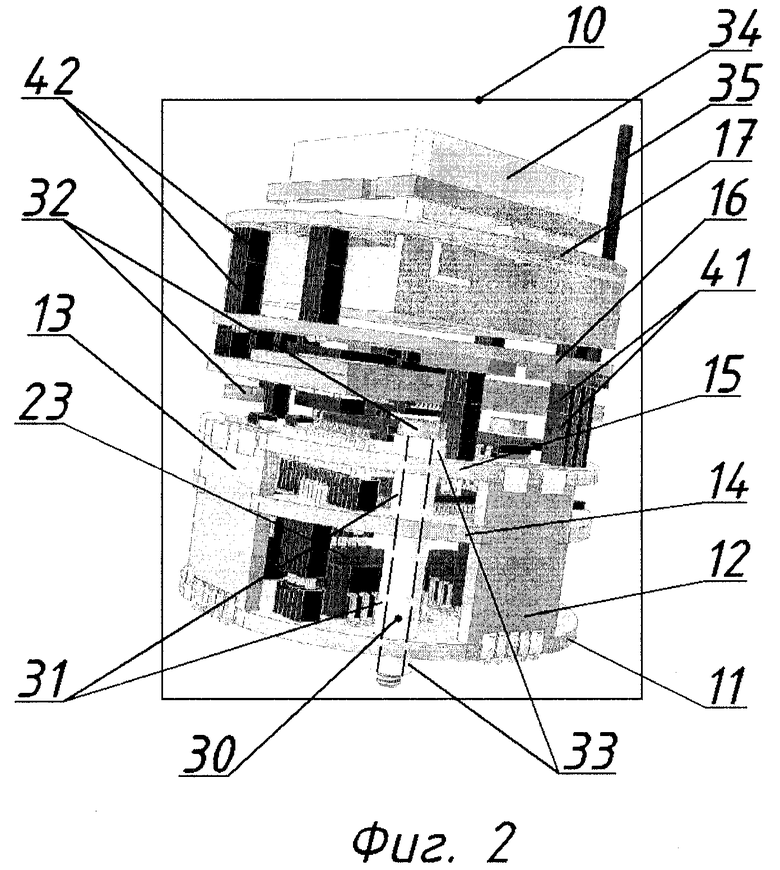
На фиг.2 представлен общий вид универсального навигационного прибора управления движением на основе микромеханических чувствительных элементов и унифицированная интегрированная бесплатформенная инерциальная навигационная система в этом приборе, выполненные в бескорпусном исполнении (электронный блок).
На фиг.3 представлена структура схемы обработки информации с чувствительных элементов унифицированной интегрированной бесплатформенной инерциальной навигационной системы в составе прибора.
На фиг.4 представлена компоновка прибора в разрезе.
На фиг.5 представлена схема расположения приборной системы координат относительно корпуса прибора.
На фиг.6 показано взаимное расположение осей чувствительности микромеханических гироскопов и акселерометров относительно приборной системы координат.
Универсальный навигационный прибор управления движением на основе микромеханических чувствительных элементов и унифицированная интегрированная бесплатформенная инерциальная навигационная система для этого прибора (фиг.1, 2) содержат корпус 1 с установочными выступами 2, во внутренней полости которого устанавливается электронный блок 10. Верхняя часть корпуса 1 закрыта радиопрозрачной крышкой 3, которая соединяется с корпусом 1 посредством винтов 4, а на боковой поверхности корпуса установлен электрический разъем 5. На дне 6 корпуса 1 с наружной стороны выполнена полость 7, в котором с помощью держателя 8 установлен аккумулятор 9. Электронный блок 10 (фиг.2) состоит из платы чувствительных элементов 11, на которой размещены микромеханический гироскоп 18, измеряющий угловую скорость по оси Z ортогональной системы координат, микромеханические акселерометры 19, 20, измеряющие линейные ускорения по оси Х и Y этой же системы. Платы гироскопов 12 и плата акселерометра 13 установлены перпендикулярно плате чувствительных элементов 11 таким образом, что образуют правую систему координат, при этом гироскоп 21 и гироскоп 22 измеряют угловые скорости относительно осей Х и Y, а акселерометр 23 - линейное ускорение относительно оси Z. Одновременно на плате чувствительных элементов 11 установлены датчик температуры 24 и датчик напряжения питания 25. Сигналы с выходов гироскопов 18, 21, 22, акселерометров 19, 20, 23, датчиков температуры 24 и напряжения питания 25 поступают на входы аналоговой периферии микроконтроллера 26, расположенного на плате 14 и решающего задачи бесплатформенного инерциального блока (микроконтроллер БИБ) 28 (см. фиг.3). Данные с микроконтроллера 26 поступают на микроконтроллер 27, имеющий выходную аналоговую периферию и решающий задачи бесплатформенной навигационной системы и системы управления (микроконтроллер БИНС). Микроконтроллер 27 расположен на плате 15. Конструктивно платы чувствительных элементов 11, платы гироскопов 12, плата акселерометра 13 и платы микроконтроллеров БИБ 14 и БИНС 15 жестко соединены между собой с помощью клея и распайки электрических соединений и представляют структурно БИНС 29. В платах чувствительных элементов 11, микроконтроллера БИБ 14 и микроконтроллера БИНС 15 выполнены сквозные отверстия 30 и между платами установлены полые изолирующие втулки 31, через которые проходят винты крепления 32 блока 10 к корпусу. Под головки винтов 32 и под плату чувствительных элементов 11 устанавливаются втулки 33, являющиеся одновременно амортизаторами. На верхней стороне платы микроконтроллера БИНС 15 установлены разъемы 41 для подключения платы приемопередатчика 16 с антенной 35, являющиеся одновременно установочными элементами механического монтажа. Аналогичным образом на плату приемопередатчика через соединители 42 монтируется плата приемника спутниковой навигации 17 с антенной 34. Альтиметр 36 и одометр 40 через электрический разъем 5 соединены с микроконтроллером БИНС 27. Магнитные опоры 37 с магнитами 38 монтируются на установочные опоры 2 с помощью винтов 39.
Перечень обозначений:
1. Корпус.
2. Крепежные опоры.
3. Радиопрозрачная крышка.
4. Винты крепления крышки.
5. Электрический разъем.
6. Дно корпуса.
7. Полость аккумулятора.
8. Держатель.
9. Аккумулятор.
10. Электронный блок унифицированной интегрированной бесплатформенной инерциальной навигационной системы и системы управления.
11. Плата чувствительных элементов.
12. Плата гироскопов 21 и 22.
13. Плата акселерометра 23.
14. Плата микроконтроллера БИБ.
15. Плата микроконтроллера БИНС.
16. Плата модуля приемопередатчика.
17. Плата модуля приемника спутниковой навигационной системы.
18. Микромеханический гироскоп.
19. Микромеханический акселерометр.
20. Микромеханический акселерометр.
21. Микромеханический гироскоп.
22. Микромеханический гироскоп.
23. Микромеханический акселерометр.
24. Датчик температуры.
25. Датчик напряжения питания.
26. Микроконтроллер БИБ.
27. Микроконтроллер БИНС.
28. Бесплатформенный инерциальный блок (БИБ).
29. Бесплатформенная инерциальная навигационная система (БИНС).
30. Сквозные отверстия для крепления БИНС.
31. Втулки изолирующие.
32. Винты крепления БИНС.
33. Шайбы.
34. Антенна модуля приемника спутниковой навигационной системы.
35. Антенна модуля приемопередатчика радиоинтерфейса.
36. Альтиметр.
37. Магнитная опора.
38. Магнит.
39. Винты.
40. Одометр.
41. Соединители платы приемопередатчика.
42. Соединители платы приемника спутниковой навигации.
Таким образом в известном бесплатформенном инерциальном измерительном блоке исключается основание чувствительных элементов, используемое для ориентации плат с этими элементами, и вводятся дополнительные электронные модули в виде плат, выполняющие дополнительные измерения неинерциальными датчиками - приемником спутниковой навигационной системы, альтиметром и (или) одометром, обработку и передачу получаемой информации, реализуя при этом интегрированную навигационную систему и систему управления. Установка плат в приборе, сочетающая разъемные и неразъемные соединения, задает требуемую пространственную ориентацию инерциальных датчиков с ортогональностью их осей чувствительности и состав устройств, необходимый для обеспечения решения того или иного объема функциональных задач по навигации и управлению движением. Установка самого прибора может производиться механическим крепежом через отверстия его установочных выступов или с помощью устанавливаемых на них магнитных опор. Перечисленные решения обеспечивают универсальность прибора в зависимости от его применения.
Предлагаемые изобретения расширяют функциональные и эксплуатационные возможности прибора, обеспечивая его использование в системах навигации при длительных режимах работы путем интеграции его с датчиком положения спутниковой навигационной системы и другими датчиками без повышенных технологических требований к изготовлению и эксплуатации его элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ ЛЕТАТЕЛЬНОГО МИКРОАППАРАТА (ЛМА) С ИНТЕГРАЛЬНОЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ (ИБИНС) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263283C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕГИОНАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ТЕЛЕКОММУТАЦИОННАЯ ВОЗДУШНАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2287910C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| БОРТОВОЕ УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2011 |
|
RU2480834C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |


Изобретения относятся к измерительной технике, в частности к навигационным гироскопическим приборам, и могут найти применение в системах навигации подвижных объектов, в автопилотах авиасудомоделей и мобильных комплексов авианаблюдений. Навигационный прибор на основе микромеханических чувствительных элементов содержит защитный корпус с выводами, в котором размещены интегрированная бесплатформенная инерциальная навигационная система с микромеханическими чувствительными элементами, плата чувствительных элементов со схемой обработки информации, две платы, связанные с платой чувствительных элементов и/или между собой установочными элементами электромеханического монтажа, при этом одна из них выполнена в виде платы приемопередатчика с антенной приема и передачи данных с наземной станции слежения, а вторая - в виде платы приемника спутниковой навигации с соответствующей спутниковой антенной. Защитный корпус снабжен радиопрозрачной крышкой, а с наружной стороны корпуса выполнены полость для размещения аккумулятора и установочные выступы с магнитными опорами для закрепления на движущемся объекте. Унифицированная интегрированная бесплатформенная инерциальная навигационная система содержит размещенные в корпусе микромеханические гироскопы и акселерометры, плату чувствительных элементов, схему обработки информации с чувствительных элементов, плату микроконтроллера бесплатформенного инерциального блока (БИБ), плату микроконтроллера бесплатформенной инерциальной навигационной системы (БИНС) и, по меньшей мере, две платы микромеханических гироскопов и/или акселерометров, установленные перпендикулярно плате чувствительных элементов и жестко скрепленные с ней. Техническим результатом является расширение функциональных и эксплуатационных возможностей прибора, обеспечение его использования в системах навигации при длительных режимах работы путем интеграции его с датчиком положения спутниковой навигационной системы. 2 н. и 1 з.п. ф-лы, 6 ил.
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| RU 2058534 C1, 20.04.1996 | |||
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

