Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах защиты грузоподъемных кранов стрелового типа с маневровой стрелой от перегрузки и столкновения с препятствиями и для контроля режима использования крана.
Известны способы защиты грузоподъемного крана стрелового типа с маневровой стрелой, включающие предварительное, например, расчетным путем при проектировании крана, определение величин нагрузок, допустимых для различных пространственных положений его стрелы, их запоминание, определение в процессе работы крана прямым или косвенным методом рабочих параметров, характеризующих текущую нагрузку и текущее пространственное положение стрелы (усилия в канатах на кранах с гибкой подвески стрелы, или давления в гидроцилиндре подъема стрелы на кранах с жесткой подвеской стрелы, длины и угла наклона стрелы, угла поворота платформы и др.), сравнение текущей нагрузки с запомненной допустимой нагрузкой для текущего пространственного положения стрелы и последующее формирование предупреждающего информационного сигнала и/или сигнала управления, в частности сигнала отключения, по меньшей мере, одного механизма крана, если текущая нагрузка превышает допустимую, или при достижении предельных положений оголовка стрелы.
Данный способ реализован, например, в устройстве защиты строительного крана, защищенном свидетельством РФ на полезную модель №11191, В66С 23/90, 16.09.1999. Известное устройство содержит датчики нагрузки, угла наклона и длины стрелы, индикатор параметров и последовательно соединенные блок задания допустимой нагрузки, компаратор, исполнительный блок, выход которого подключен к первому входу регистратора параметров. Указанные способ и устройство являются наиболее близкими к заявленному изобретению.
Недостатком известных технических решений является низкая точность контроля параметров крана, прежде всего вследствие существенных отклонений этих параметров от расчетных значений, а также трудности учета некоторых из них (прежде всего деформации конструкции под различными нагрузками) при проектировании и настройке на кране защитных характеристик устройства.
Задачей, на решение которой направлены заявляемые изобретения, является разработка способа защиты грузоподъемного крана стрелового типа с маневровой стрелой и устройства для его осуществления, которые обеспечивали бы повышенную безопасность работы грузоподъемного крана за счет повышения точности контроля его параметров.
Поставленная техническая задача достигается тем, что в известном способе защиты грузоподъемного крана стрелового типа с маневровой стрелой, включающем предварительное, например, расчетным путем при проектировании крана, определение величин нагрузок, допустимых для различных пространственных положений его стрелы, их запоминание, определение в процессе работы крана прямым или косвенным методом рабочих параметров, характеризующих текущую нагрузку и текущее пространственное положение стрелы, сравнение текущей нагрузки с запомненной допустимой нагрузкой для текущего пространственного положения стрелы и последующее формирование предупреждающего информационного сигнала и/или сигнала управления, в частности сигнала отключения, по меньшей мере, одного механизма крана, если текущая нагрузка превышает допустимую, или при достижении предельных положений оголовка стрелы, согласно изобретению до начала работы крана измеряют под известной нагрузкой, а затем без нагрузки, прямым или косвенным методом рабочие параметры, характеризующие нагрузку и текущее пространственное положение стрелы, запоминают их, измеряют внешними калиброванными приборами указанные параметры, запоминают их и в процессе работы крана используют при определении фактической и допустимой нагрузки и фактического положения оголовка стрелы.
Применительно к системе, реализующей заявленный способ защиты грузоподъемного крана, поставленная техническая задача достигается тем, что в известную систему защиты грузоподъемного крана стрелового типа с маневровой стрелой, содержащую датчики нагрузки и угла наклона стрелы, индикатор параметров и последовательно соединенные блок задания допустимой нагрузки, компаратор и исполнительный блок, выход которого подключен к первому входу регистратора параметров, согласно изобретению введены блок записи расчетных значений параметров, блок коррекции, блок определения массы груза, блок масштабирования, блок переменных коэффициентов, переключатель, блок записи прогиба стрелы и блок вычисления вылета, при этом выход датчика нагрузки подключен к первым входам блока определения массы груза, блока коррекции и блока масштабирования, выход датчика угла наклона стрелы подключен ко второму входу блока коррекции, первому входу индикатора параметров и первому входу блока вычисления вылета, выход которого соединен с входом блока задания допустимой нагрузки, выход блока записи расчетных значений параметров соединен с третьим входом блока коррекции, первый выход которого подключен ко второму входу блока определения массы груза, а второй выход - через блок записи прогиба стрелы - ко второму входу блока вычисления вылета, вход блока переменных коэффициентов подключен к переключателю, а выход - ко второму входу блока масштабирования, выход которого соединен со вторым входом блока записи прогиба стрелы, выход блока определения массы груза подключен ко второму входу компаратора, второму входу регистратора параметров и второму входу индикатора параметров, третий вход которого соединен с выходом блока задания допустимой нагрузки, а четвертый вход - с выходом блока вычисления вылета, выход датчика угла наклона стрелы подключен также к третьему входу регистратора параметров, четвертый вход которого соединен с выходом датчика нагрузки, пятый вход - с выходом компаратора, шестой вход - с выходом блока задания допустимой нагрузки, а седьмой выход - с выходом блока вычисления вылета.
Система безопасности может быть снабжена датчиком длины стрелы и функциональным преобразователем, при этом выход датчика длины стрелы подключен к четвертому входу блока коррекции и к первому входу функционального преобразователя, второй вход которого подключен к третьему выходу блока коррекции, а выход - к третьему входу блока масштабирования, третьему входу блока вычисления вылета, к пятому входу индикатора параметров и к восьмому входу регистратора параметров.
Сущность изобретения заключается в том, что датчиками длины и угла наклона стрелы (и при необходимости, в зависимости от типа крана, дополнительно датчиками других параметров, например датчиком азимута для стреловых кранов или датчиком высоты подъема крюка для башенных кранов и т.д.) производится запись и последующий контроль координат препятствий, вследствие чего их собственное влияние на точность контроля координат несущественно. Существенным является влияние отклонений и изменений под нагрузкой параметров оборудования крана, что имеет место в вертикальной плоскости стрелы (и башни). В связи с этим в данной заявке предлагается техническая реализация юстировки системы на грузоподъемном кране в каналах контроля нагрузки и изменения параметров оборудования в вертикальной плоскости стрелы, т.е. по каналам датчиков нагрузки, длины и угла наклона стрелы. Для этого до начала работы крана измеряют под известной нагрузкой, а затем без нагрузки, прямым или косвенным методом рабочие параметры, характеризующие нагрузку и текущее пространственное положение стрелы, запоминают их, измеряют внешними калиброванными приборами указанные параметры, запоминают их, и в процессе работы крана используют при определении фактической и допустимой нагрузки и фактического положения оголовка стрелы.
Технический результат изобретения заключается в повышении безопасности грузоподъемного крана за счет повышения точности контроля его параметров.
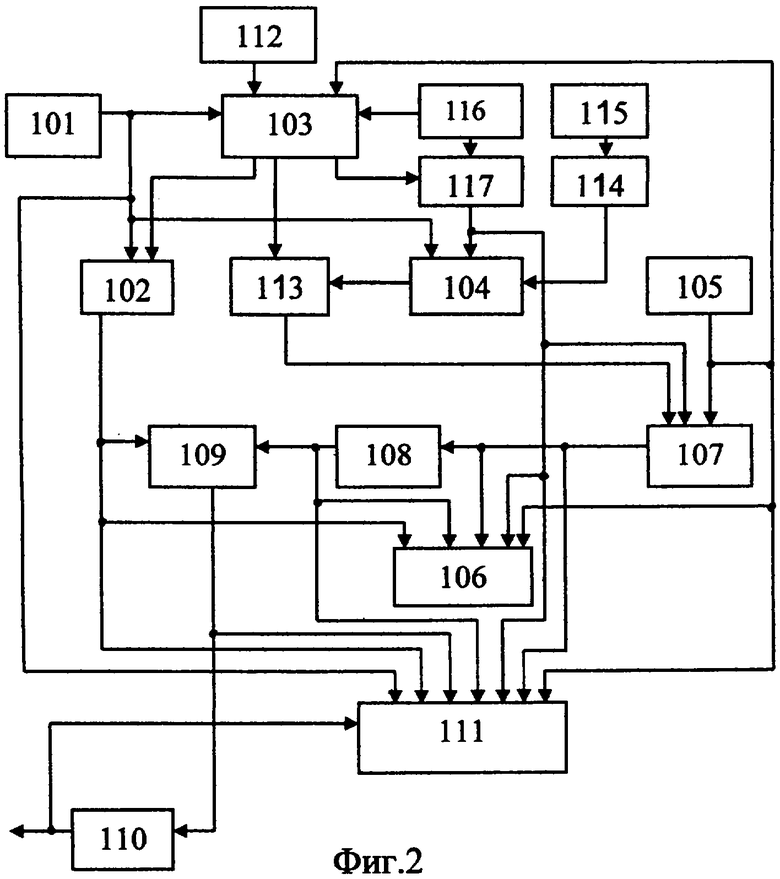
На фиг.1 и 2 представлены функциональные схемы предлагаемой системы защиты грузоподъемных кранов стрелового типа с фиксированной длиной стрелы и с телескопической стрелой соответственно.
Система защиты грузоподъемного крана содержит датчик 1 нагрузки, блок 2 определения массы груза, блок 3 коррекции, блок 4 масштабирования, датчик 5 угла наклона стрелы относительно гравитационной вертикали, индикатор 6 параметров, блок 7 вычисления вылета, блок 8 задания допустимой нагрузки, компаратор 9, исполнительный блок 10, регистратор 11 параметров, блок 12 записи расчетных значений параметров, блок 13 записи прогиба стрелы, блок 14 переменных коэффициентов и переключатель 15.
Выход датчика 1 нагрузки подключен к первым входам блока 2 определения массы груза, блока 3 коррекции и блока 4 масштабирования.
Выход датчика 5 угла наклона стрелы подключен ко второму входу блока 3 коррекции, первому входу индикатора 6 параметров и через последовательно соединенные блок 7 вычисления вылета, блок 8 задания допустимой нагрузки, компаратор 9 и исполнительный блок 10 - к первому входу регистратора 11 параметров крана.
Выход блока 12 записи расчетных значений параметров соединен с третьим входом блока 3 коррекции, первый выход которого подключен ко второму входу блока 2 определения массы груза, а второй выход - через блок 13 записи прогиба стрелы - ко второму входу блока 7 вычисления вылета.
Вход блока 14 переменных коэффициентов подключен к переключателю 15, а выход - ко второму входу блока 4 масштабирования, выход которого соединен со вторым входом блока 13 записи прогиба стрелы.
Выход блока 2 определения массы груза подключен ко второму входу компаратора 9, второму входу регистратора 11 параметров и второму входу индикатора 6 параметров, третий вход которого соединен с выходом блока 8 задания допустимой нагрузки, а четвертый вход - с выходом блока 7 вычисления вылета.
Выход датчика 5 угла наклона стрелы подключен также к третьему входу регистратора 11 параметров, четвертый вход которого соединен с выходом датчика 1 нагрузки, пятый вход - с выходом компаратора 9, шестой вход - с выходом блока 8 задания допустимой нагрузки, а седьмой выход - с выходом блока 7 вычисления вылета.
К выходу исполнительного блока подключаются исполнительные механизмы.
На кране с гибкой (на канатах) подвеской стрелы фиксированной длины датчик 1 нагрузки устанавливается в передаточный механизм стрелоподъемного каната, обеспечивающий уменьшение усилия на указанный датчик, и представляет собой датчик усилия. На стреле располагается датчик 5 угла наклона стрелы.
Блок 2 определения массы груза предназначен для преобразования сигнала, контролируемого датчиком 1 нагрузки, в сигнал, пропорциональный массе груза.
Блок 3 коррекции состоит из электропрограммируемого запоминающего устройства, в которое при настройке на кране заносятся как расчетные (или измеренные внешними измерительными приборами высокой точности) значения контролируемых параметров, так и соответствующие им показатели, определяемые по сигналам датчиков 1 и 5; на основании этих данных вычисляется поправка к показаниям датчиков, измеряемым в рабочем режиме системы.
Блок 4 масштабирования предназначен для корректировки значений прогиба стрелы в зависимости от ее длины, в частности для кранов с фиксированными секциями стрелы и башенных кранов - по сигналу блока 14 переменных коэффициентов, определяемых переключателем 15 в зависимости от типа крана.
Блок 7 вычисления вылета предназначен для преобразования сигнала датчика 5 угла наклона относительно вертикали в значение синуса этого угла, т.е. в величину, пропорциональную вылету, а блок 8 задания допустимой нагрузки предназначен для преобразования сигнала вылета в сигнал допустимой нагрузки. Блоки 7 и 8 могут быть выполнены в виде постоянных запоминающих устройств (ПЗУ), адресные входы которых являются входами соответственно блоков 7 и 8, а выходами этих блоков является шина данных ПЗУ с записанными значениями соответственно вылетов и допустимых нагрузок (для определенных вылетов).
Система имеет индикатор 6 и регистратор 11 параметров крана с целью анализа его работы. Регистрируемые показатели могут быть как текущими для оценки, например, предаварийной ситуации, так и долговременными статистическими для оценки ресурсных показателей крана, в том числе необходимости проведения на нем регламентных работ. Регистратор 11 параметров состоит из процессора и электропрограммируемого запоминающего устройства, входы которого подключаются соответственно к выходам датчиков 1 и 5 и функциональным узлам системы для регистрации показателей работы крана и самой системы. Если сама система выполняется средствами цифровой техники, регистратор может не содержать процессора.
Блок 12 записи расчетных значений параметров включает в себя клавиатуру для ручного ввода в блок 3 коррекции расчетных значений усилий, длин и углов, соответствующих измеряемым датчиками 1 и 5.
Блок 13 записи прогиба стрелы предназначен для записи разности значений вылетов без нагрузки и при известной (калиброванной) массе груза, производимой при юстировке устройства на кране.
Блок 14 переменных коэффициентов предназначен для записи данных, зависящих от конструктивных особенностей и числа установленных секций стрелы или башни крана.
Переключатель 15 предпочтительно выполняется на средствах цифровой техники и представляет собой электронный коммутатор.
Система защиты грузоподъемного крана с телескопической стрелой, представленная на фиг.2, содержит датчик 101 нагрузки, блок 102 определения массы груза, блок 103 коррекции, блок 104 масштабирования, датчик 105 угла наклона стрелы относительно гравитационной вертикали, индикатор 106 параметров, блок 107 вычисления вылета, блок 108 задания допустимой нагрузки, компаратор 109, исполнительный блок 110, регистратор 111 параметров, блок 112 записи расчетных значений параметров, блок 113 записи прогиба стрелы, блок 114 переменных коэффициентов, переключатель 115, датчик длины стрелы 116 и функциональный преобразователь 117.
Выход датчика 101 нагрузки подключен к первым входам блока 102 определения массы груза, блока 103 коррекции и блока 104 масштабирования.
Выход датчика 105 угла наклона стрелы подключен ко второму входу блока 103 коррекции, первому входу индикатора 106 параметров и через последовательно соединенные блок 107 вычисления вылета, блок 108 задания допустимой нагрузки, компаратор 109 и исполнительный блок 110 - к первому входу регистратора 111 параметров крана.
Выход блока 112 записи расчетных значений параметров соединен с третьим входом блока 103 коррекции, первый выход которого подключен ко второму входу блока 102 определения массы груза, а второй выход - через блок 113 записи прогиба стрелы - ко второму входу блока 107 вычисления вылета.
Вход блока 114 переменных коэффициентов подключен к переключателю 115, а выход - ко второму входу блока 104 масштабирования, выход которого соединен со вторым входом блока 113 записи прогиба стрелы.
Выход блока 102 определения массы груза подключен ко второму входу компаратора 109, второму входу регистратора 111 параметров и второму входу индикатора 106 параметров, третий вход которого соединен с выходом блока 108 задания допустимой нагрузки, а четвертый вход - с выходом блока 107 вычисления вылета.
Выход датчика 105 угла наклона стрелы подключен также к третьему входу регистратора 111 параметров, четвертый вход которого соединен с выходом датчика 101 нагрузки, пятый вход - с выходом компаратора 109, шестой вход - с выходом блока 108 задания допустимой нагрузки, а седьмой выход - с выходом блока 107 вычисления вылета.
Выход датчика 116 длины стрелы подключен к четвертому входу блока 103 коррекции и к первому входу функционального преобразователя 117, второй вход которого подключен к третьему выходу блока 103 коррекции, а выход - к третьему входу блока 10 масштабирования, третьему входу блока 107 вычисления вылета, к пятому входу индикатора 106 параметров и к восьмому входу регистратора 111 параметров.
К выходу исполнительного блока 110 подключаются исполнительные механизмы.
Для крана с телескопической стрелой и гидроприводами механизмов оборудования датчик 101 нагрузки контролирует усилие в гидроцилиндре подъема стрелы и представляет собой комбинацию двух датчиков давления в поршневой и штоковой полостях, сигналы которых обрабатываются по соответствующей формуле. На стреле располагаются датчик 116 длины стрелы и датчик 105 угла наклона стрелы.
Блок 102 определения массы груза предназначен для преобразования сигнала, контролируемого датчиком 101 нагрузки, в сигнал, пропорциональный массе груза.
Блок 103 коррекции состоит из электропрограммируемого запоминающего устройства, в которое при настройке на кране заносятся как расчетные (или измеренные внешними измерительными приборами высокой точности) значения контролируемых параметров, так и соответствующие им показатели, определяемые по сигналам датчиков 101, 105, 116. На основании этих данных вычисляется поправка к показаниям датчиков, измеряемым в рабочем режиме системы.
Функциональный преобразователь 117 предназначен для преобразования сигнала датчика 116 длины стрелы в величину, пропорциональную длине стрелы, и выполнен на средствах цифровой техники, но может быть выполнен на блоках нелинейностей или на профильном механическом элементе.
Блок 104 масштабирования предназначен для корректировки значений прогиба стрелы в зависимости от ее длины по сигналу функционального преобразователя 117 и дополнительно по сигналу блока 114 переменных коэффициентов, определяемых переключателем 115 в зависимости от типа крана, например, при наличии на выдвижной секции стрелы удлинителя или гуськов. При отсутствии таких элементов переключатель 115 устанавливается в такое положение, при котором блок переменных коэффициентов не оказывает влияние на вычисления.
Блок 107 вычисления вылета предназначен для преобразования сигнала датчика 105 угла наклона стрелы относительно гравитационной вертикали в значение синуса этого угла, т.е. в величину, пропорциональную вылету, а блок 108 задания допустимой нагрузки предназначен для преобразования сигнала вылета в сигнал допустимой нагрузки. Блок 107 вычисления вылета, а также блок 108 задания допустимой нагрузки могут быть выполнены в виде постоянных запоминающих устройств (ПЗУ), адресные входы которых являются входами соответственно блоков 107 и 108, а выходами этих блоков является шина данных ПЗУ с записанными значениями соответственно вылетов и допустимых нагрузок (для определенных вылетов).
Система имеет индикатор 106 и регистратор 111 параметров крана с целью анализа его работы. Регистрируемые показатели могут быть как текущими для оценки, например, предаварийной ситуации, так и долговременными статистическими для оценки ресурсных показателей крана, в том числе необходимости проведения на нем регламентных работ. Регистратор 111 параметров состоит из процессора и электропрограммируемого запоминающего устройства, входы которого подключаются соответственно к выходам всех датчиков и функциональным узлам системы для регистрации показателей работы крана и самой системы. Если сама система выполняется средствами цифровой техники, регистратор может не содержать процессора.
Блок 112 записи расчетных значений параметров включает в себя клавиатуру для ручного ввода в блок 103 коррекции расчетных значений усилий, длин и углов, соответствующих измеряемым датчиками 101, 116 и 105.
Блок 113 записи прогиба стрелы предназначен для записи разности значений вылетов без нагрузки и при известной (калиброванной) массе груза, производимой при юстировке устройства на кране.
Переключатель 115 предпочтительно выполняется на средствах цифровой техники и представляет собой электронный коммутатор.
Функциональный преобразователь 117 выполнен на средствах цифровой техники, но может быть выполнен на блоках нелинейностей или на профильном механическом элементе.
Способ осуществляется следующим образом.
При первоначальной установке системы производят ее настройку (юстировку) на кране с целью минимизации погрешностей как самой системы (прежде всего, датчиков и узлов их установки), так и погрешностей, вызванных отклонением параметров крана от расчетных значений.
Для этого стрела крана устанавливается в несколько положений, углы наклона которых измеряются датчиком 5 (105) при различных значениях длин стрел, измеряемых датчиком 116, если устройство применяется на кране с телескопической стрелой. Если кран имеет на выдвижной секции стрелы дополнительные конструктивные элементы фиксированной длины (удлинитель или гусек), или выполнен с фиксированными секциями стрелы, когда датчик длины стрелы отсутствует, то перед началом юстировки необходимо переключателем 15 (115) установить в блоке 14 (114) переменных коэффициентов величину, зависящую от конструктивных особенностей крана, например, числа установленных секций стрелы или башни крана.
После этого необходимо подвесить на крюк калибровочный груз, установить стрелу на вылет калибруемой точки и ввести это значение в блок 3 (103). В «память» устройства записывается информация датчика 1 (101) нагрузки в результате воздействия калибровочного груза.
Одновременно в этой точке датчиком 5 (105) угла наклона стрелы автоматически проводится измерение и запись в блок 3 (103) коррекции значения угла, по которому вычисляется вылет (с учетом прогиба стрелы от воздействия на кран нагруженной стрелы).
После ввода указанных данных следует опустить груз на землю, не допуская манипуляций стрелой измерить рулеткой реальный вылет при ненагруженной стреле (без груза на крюке), и блоком 12 (112) задании расчетных значений параметров набрать измеренное число.
Блок 3 (103) коррекции производит запись в «память» значение измеренного вылета. Одновременно в этой точке юстировки датчиком 1 (101) нагрузки автоматически проводится измерение и запись в блок 3 (103) коррекции значения нагрузки от воздействия на датчик ненагруженной стрелы с крюком.
Далее следуют однотипные операции по установке стрелы крана в следующее угловое положение, измерение и введение в «память» блока 3 (103) коррекции численных значений вылетов без нагрузки и под воздействием грузов калибровочной массы.
Таким образом, в блок 3 (103) коррекции заносятся данные для вычисления поправок и коррекции показаний системы. Все поправки хранятся в блоке коррекции в течение всего времени эксплуатации крана (или до момента повторной юстировки).
При этом в блок 13 (113) записи прогиба стрелы записывается разность значений вылетов, т.е. прогиб стрелы под воздействием грузов калибровочной массы.
В дальнейшем во время работы крана и при вычислении вылета величина прогиба стрелы (или башни), передаваемая блоком 13 (113) в блок 7 (107) вычисления вылета, масштабируется блоком 4 (104) по сигналам датчик 1 (101) нагрузки и датчика 116 длины стрелы.
Сигналы всех датчиков во время рабочего цикла проходят блок 3 (103) коррекции и блок 13 (113) записи прогиба стрелы, в котором к этим сигналам датчиков добавляются соответствующие поправки.
Допустимое значение нагрузки определяется вылетом стрелы и постоянно в автоматическом режиме контролируется датчиками 116 и 5 (105) и функциональным преобразователем 117 и блоком 7 (107) вычисления вылета, создавая на входе блока 8 (108) допустимой нагрузки сигнал, зависящий от положения стрелы, и вызывая на выходе блока появление сигнала допустимой нагрузки.
Во время эксплуатации крана, исполнительные механизмы которого подключены к исполнительному блоку 10 (110), в случаях превышения сигналом датчика 1 (101) фактической нагрузки и соответственно блоком определения массы груза 2 (102) допустимых значений, определяемых сигналом блока 8 (108), происходит срабатывание компаратора 9 (109) и отключение соответствующих исполнительных механизмов.
Одновременно датчики 1 (101), 116, 5 (105) и функциональные узлы устройства создают сигналы на индикатор 6 (106), создавая информационное резервирование устройства защиты, и регистратор 11 (111) параметров. Запись текущих параметров работы крана производится в течение определенного периода времени, данные сохраняются в течение этого периода, а затем обновляются; эти данные служат для анализа при возникновении аварии.
Система для осуществления предлагаемого способа защиты грузоподъемного крана может быть изготовлена промышленным способом с использованием современных компонентов и технологий. Специалисту в данной области техники должно быть очевидным, что в настоящем изобретении возможны разнообразные модификации и изменения. Соответственно, предполагается, что настоящее изобретение охватывает указанные модификации и изменения, а также их эквиваленты, без отступления от сущности и объема изобретения, раскрытого в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325317C1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1992 |
|
RU2045468C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| СПОСОБ НАСТРОЙКИ ЭЛЕКТРОННОГО УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И ЭЛЕКТРОННОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ С ЕГО РЕАЛИЗАЦИЕЙ | 2006 |
|
RU2326803C2 |
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ПРИ ПОДЪЕМЕ ГРУЗА ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2312814C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗОК | 2004 |
|
RU2276096C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2316467C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2005 |
|
RU2282577C2 |
| Ограничитель грузоподъемности стрелового крана | 1988 |
|
SU1527137A1 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты грузоподъемных кранов. Система содержит датчики нагрузки (1) и угла наклона стрелы (5), индикатор параметров (6) и последовательно соединенные блок задания допустимой нагрузки (8), компаратор (9) и исполнительный блок (10), выход которого подключен к первому входу регистратора параметров (11), блок записи расчетных значений параметров (12), блок коррекции (3), блок определения массы груза (2), блок масштабирования (4), блок переменных коэффициентов (14), переключатель (15), блок записи прогиба стрелы (13) и блок вычисления вылета (7). Техническим результатом изобретения является повышение безопасности работы крана за счет повышения точности контроля его параметров. 1 з.п. ф-лы, 2 ил.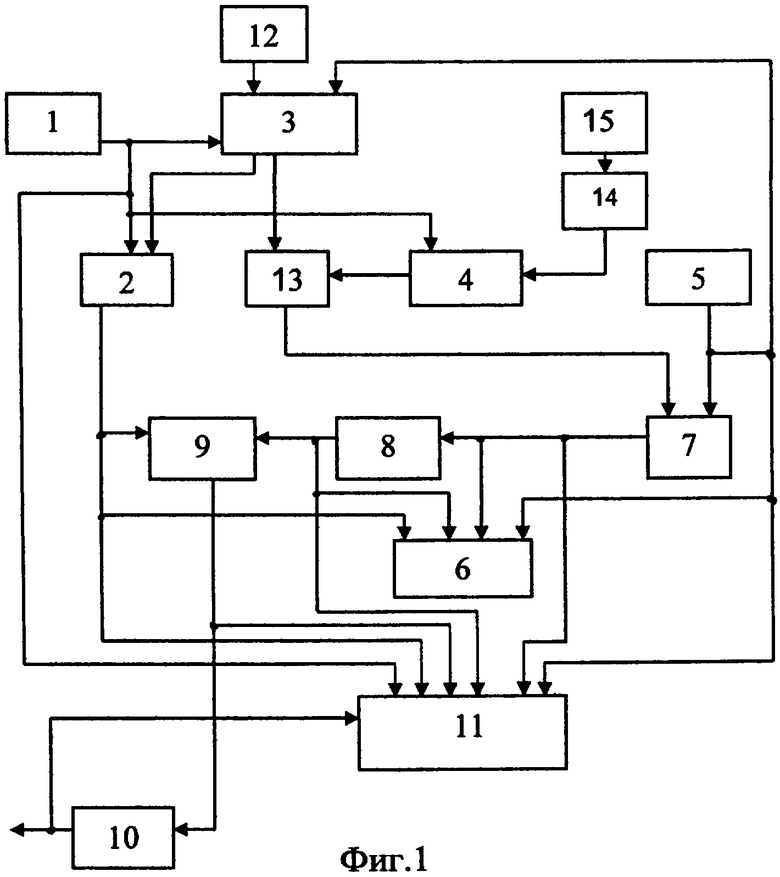
| Силовая установка, действующая с помощью парогаза | 1927 |
|
SU11191A1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2003 |
|
RU2262481C2 |
| RU 2004128519 А, 20.03.2005 | |||
| RU 2005116352 А, 20.09.2005 | |||
| RU 2004125713 А, 10.03.2005 | |||
| US 5730305 А, 24.03.1998. | |||

