Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления стреловых кранов.
Известен способ уменьшения раскачивания груза при подъеме стреловым краном и система для его осуществления, описанные в патенте РФ №2309112 Cl, B66C 23/88, B66C 13/18, 27.10.2007. Способ включает в себя измерение параметров крана, характеризующих нагрузку и геометрию грузоподъемного крана и воздействие на органы управления краном для запуска и отключения приводов механизмов, перемещающих оборудование крана. Система для осуществления данного способа содержит органы управления механизмами крана, переключатель кратности полиспаста, датчики параметров крана, включающие в себя датчик нагрузки, датчик длины стрелы, датчик угла наклона стрелы, датчик угла поворота платформы и датчик длины грузового каната, вычислительно-управляющее устройство, включающее блок ограничения нагрузки, блок вычисления инерционных показателей оборудования, блок предварительного ограничения, блок ограничения перемещения, блок определения фактических скоростей оборудования, блок выбора допустимой скорости движения, блок вычисления поправки к расстоянию предварительного ограничения перемещения, блок определения высоты подвеса груза, блок задержки при останове оборудования крана, блок временного отключения привода при торможении, блок вычисления ускорений, элемент "ИЛИ-НЕ", блок задержек при начале движения оборудования крана, блок временного отключения привода при разгоне, элемент "И" и блок определения высоты подвеса груза, и блок определения периода раскачивания груза. Способ обеспечивает гашение колебаний при начале и остановке перемещения уже поднятого с поверхности груза путем импульсного режима управления перемещением, но не обеспечивает гашение колебаний при подъеме груза с земли.
Наиболее близкими к заявляемому изобретению по совокупности существенных признаков являются способ предотвращения раскачивания груза при подъеме стреловым краном и устройство для его осуществления, описанные в патенте РФ №RU 2312814 C1, B66C 23/88, B66C 13/18, 20.12.2007.
Известный способ заключается в задании допустимого отклонения ветвей грузового каната от вертикального положения, воздействии на органы управления краном для запуска и отключения приводов механизмов, перемещающих оборудование крана, измерении нагрузки и угловом перемещении стрелы в вертикальной плоскости для поддержания ветвей грузового каната в вертикальном положении.
Система для реализации известного способа содержит органы управления механизмами крана, задатчик допустимого изменения натяжения канатов, задатчик угла отклонения ветвей грузового каната от вертикального положения, датчик нагрузки, датчик угла отклонения ветвей грузового каната от вертикального положения и вычислительно-управляющее устройство, включающее в себя блок контроля изменения натяжения канатов и логические элементы: двухпозиционный компаратор, трехпозиционный компаратор, четыре элемента "И" и два элемента "ИЛИ".
Данный способ позволяет снизить колебания при подъеме груза с земли, вызванные отклонением ветвей грузового каната от вертикального положения при отрыве груза от поверхности, но он также имеет ряд недостатков.
Во-первых, задание ограничения в виде максимального угла отклонения ветвей грузового каната от вертикали не позволяет обеспечить небольшой амплитуды колебаний груза при большой длине стрелы и угле ее наклона относительно горизонта.
Во-вторых, датчики угла наклона каната серийно не выпускаются, т.к. пока не создана достаточно надежная конструкция этих датчиков.
В-третьих, необходимость передачи сигнала с датчика угла наклона каната, расположенного на оголовке стрелы, к вычислительно-управляющему устройству по длинной линии связи через вращающееся токосъемное устройство также снижает надежность системы.
Задачей настоящего изобретения является повышение безопасности работы стрелового крана при подъеме груза путем уменьшения раскачивания груза при любой длине и угле наклона к горизонту стрелы крана, а также повышение надежности и снижение стоимости системы управления краном.
Поставленные технические задачи решаются тем, что в способе уменьшения раскачивания груза при подъеме стреловым краном, заключающимся в задании допустимого отклонения ветвей грузового каната от вертикального положения, воздействии на органы управления краном для запуска и отключения приводов механизмов, перемещающих оборудование крана, измерении нагрузки и угловом перемещении стрелы в вертикальной плоскости для поддержания ветвей грузового каната в вертикальном положении, согласно изобретению допустимое отклонение ветвей грузового каната от вертикального положения задают в виде значения допустимого отклонения вылета и запоминают его, перед включением механизма подъема грузозахватного органа по конструктивным параметрам крана и измеренным значениям крена, нагрузки и угла наклона стрелы определяют и запоминают начальное значение вылета, в процессе подъема груза определяют текущее значение вылета по конструктивным параметрам крана и по измеренным значениям крена, нагрузки и угла наклона стрелы, а также определяют граничные значения вылета, сравнивают текущее значение вылета с граничными значениями вылета и при достижении граничного значения вылета отключают механизм подъема грузозахватного органа и включают механизм изменения вылета для углового перемещения стрелы в сторону противоположной границы допустимых значений вылета, а при достижении текущим значением вылета противоположной границы отключают механизм изменения вылета и включают механизм подъема грузозахватного органа.
Текущее значение вылета дополнительно сравнивают с начальным значением вылета и при нахождении текущего значения вылета в пределах граничных значений вылета одновременно включают механизмы подъема грузозахватного органа и изменения вылета, а скорость работы механизмов регулируют в зависимости от направления отклонения текущего значения вылета от начального значения.
Регулировку скорости работы механизмов производят с учетом величины отклонения текущего значения вылета от начального значения.
При определении начального и текущего значения вылета учитывают значение измеренной длины стрелы.
Допустимое отклонение вылета от запомненного значения задают в виде функции от текущих значений параметров работы крана.
Скорость подъема грузозахватного органа и изменения вылета регулируют в зависимости от текущих значений параметров работы крана.
Применительно к системе уменьшения раскачивания груза при подъеме стреловым краном поставленная задача решается тем, что в систему, содержащую органы управления механизмами крана, включающие рукоятки подъема/опускания груза и изменения вылета, вычислительно-управляющее устройство, датчики параметров крана, включающие датчик нагрузки, и формирователь сигналов управления механизмами крана, согласно изобретению введен выключатель режима подъема груза без раскачивания, датчики параметров крана дополнительно включают в себя датчик угла наклона стрелы и датчик крена, а вычислительно-управляющее устройство выполнено на основе микроконтроллера, снабженного запоминающим устройством, при этом к микроконтроллеру непосредственно или через согласующие устройства подключены датчик нагрузки, датчик угла наклона стрелы, датчик крена, выключатель режима подъема груза без раскачивания и формирователь сигналов управления механизмами крана, к которому дополнительно подключены органы управления механизмами крана.
Кроме того, система может быть снабжена датчиком длины стрелы, подключенным к вычислительно-управляющему устройству непосредственно или через дополнительное согласующее устройство.
Сущность изобретения заключается в подержании текущего значения вылета, рассчитанного по конструктивным параметрам крана и текущим значениям крена платформы крана, угла наклона стрелы к горизонту и нагрузки на грузозахватном органе, в пределах граничных значений, определяемых значением вылета, рассчитанным перед началом подъема груза, и заданным допустимым отклонением вылета от этого исходного значения в процессе подъема груза. Поддержание текущего значения вылета в заданных пределах производится путем отключения при достижении вылетом граничного значения того механизма крана, который увеличивает отклонение вылета от исходного значения и включении механизма, работа которого приводит к изменению вылета в сторону противоположной границы. Причем для уменьшения частоты переключений механизмов и повышения точности поддержания вылета при нахождении текущего значения вылета в пределах заданного диапазона могут быть включены одновременно механизмы подъема грузозахватного органа и изменения вылета, а их скорость регулируют в зависимости от направления или от направления и величины отклонения текущего значения вылета от исходного значения.
В случае крана с телескопической стрелой длина стрелы является переменным параметром, и ее значение измеряют для расчета значения вылета.
Для снижения частоты переключений механизмов крана и повышения безопасности работы допустимое отклонение вылета и скорость механизмов крана регулируют в зависимости от параметров работы крана.
Технический результат от использования данного изобретения заключается в повышении безопасности работы стрелового крана за счет снижения амплитуды колебаний при раскачивании груза в процессе подъема, а также в повышении надежности системы управления краном за счет исключения датчика углового положения ветвей грузового каната и длинной линии связи для его подключения.
На фиг.1 приведена схема, иллюстрирующая предложенный способ уменьшения раскачивания груза при подъеме на примере стрелового гидравлического крана с телескопической стрелой, на фиг.2 - функциональная схема системы для его реализации.
На фиг.1 приняты следующие обозначения:
А и Ao - текущее и начальное значения угла наклона стрелы относительно горизонта;
В - ось блоков грузового полиспаста грузового каната на оголовке стрелы;
dR - смещение оси блоков от начального положения;
G и Go - текущее и начальное значения крена платформы крана;
L - длина телескопической стрелы крана;
Lim 1 и Lim 2 - граничные значения вылета;
Q - нагрузка на грузозахватном органе;
R и Ro - текущее и начальное расчетные значения вылета;
T - допустимое отклонение вылета от исходного положения.
Система уменьшения раскачивания груза при подъеме стреловым краном содержит органы управления механизмами крана, включающие рукоятку 1 подъема/опускания груза и рукоятку 2 изменения вылета, вычислительно-управляющее устройство 3, выполненное на основе микроконтроллера 4, снабженного запоминающим устройством 5, выключатель 6 режима подъема груза без раскачивания, датчики параметров крана, включающие датчик 7 нагрузки, датчик 8 длины стрелы, датчик 9 угла наклона стрелы и датчик 10 крена, формирователь 11 сигналов управления механизмами крана и согласующие устройства, включающие контроллер 12 поворотной части крана и блок 13 согласования.
К вычислительно-управляющему устройству 3 подключены с помощью мультиплексной линии связи 14 датчик 7 нагрузки, датчик 8 длины стрелы, датчик 9 угла наклона стрелы и согласующие устройства: контроллер 12 поворотной части крана и блок 13 согласования. К контроллеру 12 поворотной части подключены датчик 10 крена и выключатель 6 режима подъема груза без раскачивания. К входам формирователя 11 сигналов управления механизмами крана подключены выход блока 13 согласования и органы управления механизмами крана: рукоятка 1 подъема/опускания груза и рукоятка 2 изменения вылета.
Предлагаемая система может быть реализована, например, на основе прибора «Ограничитель нагрузки крана ОНК-160С», выпускаемого ООО «Арзамасский электромеханический завод».
В качестве вычислительно-управляющего устройства 3 можно использовать блок отображения информации (БОИ) прибора ОНК-160С, выполненный на базе микроконтроллера MSP430F149 фирмы "Texas Instruments" (США) и содержащий микросхему FM24C256 в качестве запоминающего устройства.
В качестве датчика 7 нагрузки можно использовать датчик усилия цифровой (ДДЦ) или датчики давления цифровые (ДДЦ) в поршневой и штоковой полостях гидроцилиндра подъема стрелы, а в качестве датчиков 8 и 9 длины и угла наклона стрелы можно использовать датчик вылета (ДВ) прибора ОНК-160С.
Прибор ОНК-160С содержит также контроллер поворотной части (КПЧ) со встроенным датчиком крена. В состав некоторых модификаций прибора, например ОНК-160С-58, входит блок согласования (БС).
Мультиплексная линия связи на аппаратурном и программном уровне может быть реализована как проводной (по протоколу CAN, RS-485, или другому стандартному или нестандартному протоколу), либо беспроводной (IEEE 802.15.4, Zigbee, или другому стандартному или нестандартному протоколу). Например, мультиплексная линия связи может быть реализована посредством кабельной комбинированной линии связи (шины последовательного CAN-интерфейса), включающей в себя двухпроводную линию обмена данными и двухпроводную линию электропитания датчиков параметров крана.
В качестве выключателя 6 режима подъема без раскачивания может быть использована, например, кнопка на рукоятке управления, или тумблер на панели управления краном.
В качестве органов управления механизмами крана могут применяться серийно выпускаемые различными производителями рукоятки дискретного или пропорционального управления, например JS6000 компании Sauer-Danfoss, или джойстики Penny+Giles.
В качестве формирователя 11 сигналов управления механизмами крана можно использовать, например, контроллер PLUS+1 компании Sauer-Danfoss, или электронный блок управления ЭБУ фирмы Томас-Магнете.
Способ уменьшения раскачивания груза при подъеме стреловым краном осуществляется следующим образом.
Предварительно, например при настройке, задают допустимое отклонение ветвей грузового каната от вертикального положения в виде значения Т допустимого отклонения вылета и вводят его в запоминающее устройство 5. Значение Т может быть задано в виде константы, либо в виде функции от параметров крана (L, А или Q).
При работе устанавливают грузозахватный орган крана приблизительно над центром масс поднимаемого груза. Перед включением механизма подъема грузозахватного органа выключателем 6 включают режим подъема груза без раскачивания. При получении сигнала от выключателя 6 микроконтроллер 4 рассчитывает начальные значения усилия на грузозахватном органе (Qo) и вылета Ro по значениям конструктивных параметров крана и сигналам датчика 9 угла наклона стрелы (Ао), датчика 8 длины стрелы (Lo), датчика 10 крена (Go) и датчика 7 нагрузки (Ро). Начальное значение вылета Ro запоминают в устройстве 5.
Рукояткой 1 включают механизм подъема грузозахватного органа. При работе механизма усилие Q на грузозахватном органе возрастает, что приводит к деформации конструкции крана и перемещению точки В (в данном случае к увеличению вылета) на величину dR от исходного значения.
В процессе подъема груза непрерывно определяют текущее значение вылета R, рассчитываемое с учетом текущих значений угла наклона стрелы А, крена G, длины стрелы L и усилия Q на грузозахватном органе и граничные значения вылета (Ro+T) и (Ro-T). Сравнивают текущее значение вылета R с начальным значением вылета Ro и граничными значениями вылета (Ro+T) и (Ro-T). При достижении текущим значением вылета величины R=(Ro+T) вычислительно-управляющее устройство 3 передает в формирователь 11 сигналы на отключение механизма подъема грузозахватного органа и включение механизма уменьшения вылета (подъема стрелы). При достижении значением вылета величины R=(Ro-T) вычислительно-управляющее устройство 3 и формирователь 11 формируют сигналы на отключение механизма уменьшения вылета и включение механизма подъема грузозахватного органа, и т.д. до полного отрыва груза от земли, либо до отпускания рукояток 1 и 2 управления механизмами крана.
При необходимости в процессе подъема груза корректируют исходное значение вылета Ro путем повторного включения выключателя 6 режима подъема без раскачивания.
Для снижения амплитуды колебаний груза и частоты включений-отключений механизмов крана при текущем значении вылета (Ro+T)>R>Ro можно одновременно с включением механизма подъема груза включать механизм уменьшения вылета, а при текущем значении вылета (Ro-T)>R>Ro можно снижать скорость механизма уменьшения вылета и включать механизм увеличения вылета. Причем скорость механизма изменения вылета можно регулировать пропорционально величине отклонения dR.
Для повышения безопасности работы крана регулируют скорость механизмов крана в зависимости от нагрузки Q на грузозахватном органе.
Приведенное выше описание работы характерно для работы стрелового крана с телескопической стрелой. Для кранов некоторых типов в ряде случаев при увеличении нагрузки на грузозахватном органе в результате прогиба стрелы, подвешенной на вантах, может происходить не увеличение, а уменьшение вылета. В этом случае порядок включения-отключения механизмов подъема грузозахватного органа и изменения вылета соответственно меняется.
Заявленная система, реализующая предлагаемый способ уменьшения раскачивания груза при подъеме стреловым краном, может быть реализована промышленным способом на приборостроительном заводе с использованием современных электронных компонентов и технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2316467C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2005 |
|
RU2282577C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |

Изобретение относится к подъемно-транспортному машиностроению. В способе задают допустимое отклонение ветвей грузового каната от вертикального положения, воздействуют на органы управления краном для запуска и отключения приводов механизмов, перемещающих оборудование крана. Измеряют нагрузку и угловое перемещение стрелы в вертикальной плоскости для поддержания ветвей грузового каната в вертикальном положении. Допустимое отклонение ветвей грузового каната задают в виде значения допустимого отклонения вылета и запоминают его. Перед включением механизма подъема грузозахватного органа по конструктивным параметрам крана и измеренным значениям крена, нагрузки и угла наклона стрелы определяют и запоминают начальное значение вылета. В процессе подъема груза определяют текущее значение вылета и его граничные значения. Сравнивают текущее значение вылета с граничными значениями и при достижении граничного значения вылета отключают механизм подъема грузозахватного органа и включают механизм изменения вылета для углового перемещения стрелы в сторону противоположной границы допустимых значений вылета, а при достижении текущим значением вылета противоположной границы отключают механизм изменения вылета и включают механизм подъема грузозахватного органа. Система содержит органы управления механизмами крана, вычислительно-управляющее устройство, формирователь сигналов управления механизмами крана, выключатель режима подъема груза без раскачивания, датчик нагрузки, датчик угла наклона стрелы и датчик крена. Изобретение обеспечивает повышение безопасности работы стрелового крана и надежности системы управления. 2 н. и 6 з.п. ф-лы, 2 ил.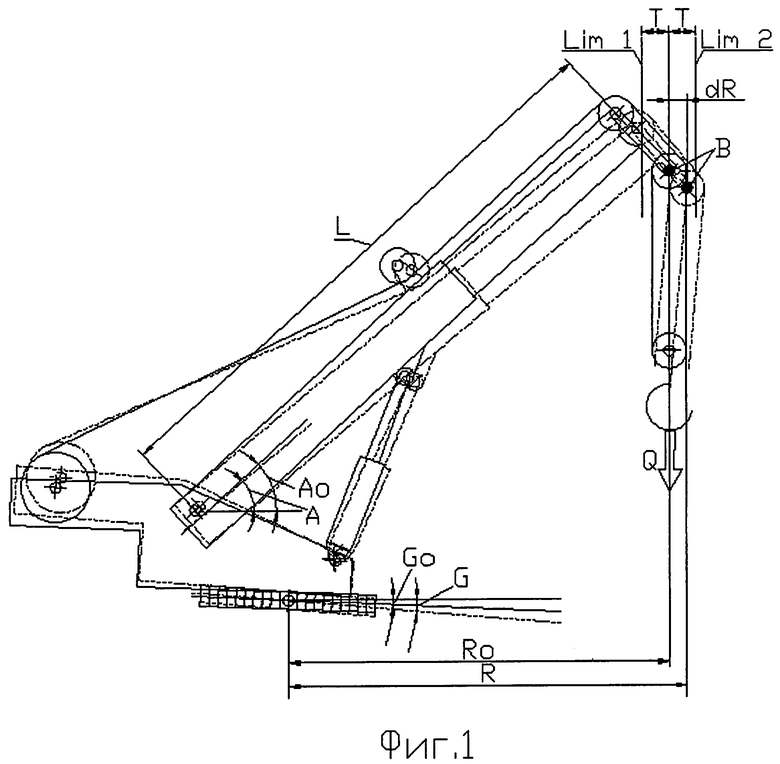
1. Способ уменьшения раскачивания груза при подъеме стреловым краном, заключающийся в задании допустимого отклонения ветвей грузового каната от вертикального положения, воздействии на органы управления краном для запуска и отключения приводов механизмов, перемещающих оборудование крана, измерении нагрузки и угловом перемещении стрелы в вертикальной плоскости для поддержания ветвей грузового каната в вертикальном положении, отличающийся тем, что допустимое отклонение ветвей грузового каната от вертикального положения задают в виде значения допустимого отклонения вылета и запоминают его, перед включением механизма подъема грузозахватного органа по конструктивным параметрам крана и измеренным значениям крена, нагрузки и угла наклона стрелы определяют и запоминают начальное значение вылета, в процессе подъема груза определяют текущее значение вылета по конструктивным параметрам крана и по измеренным значениям крена, нагрузки и угла наклона стрелы, а также определяют граничные значения вылета, сравнивают текущее значение вылета с граничными значениями вылета и при достижении граничного значения вылета отключают механизм подъема грузозахватного органа и включают механизм изменения вылета для углового перемещения стрелы в сторону противоположной границы допустимых значений вылета, а при достижении текущим значением вылета противоположной границы отключают механизм изменения вылета и включают механизм подъема грузозахватного органа.
2. Способ по п.1, отличающийся тем, что текущее значение вылета дополнительно сравнивают с начальным значением вылета и при нахождении текущего значения вылета в пределах граничных значений вылета одновременно включают механизмы подъема грузозахватного органа и изменения вылета, а скорость работы механизмов регулируют в зависимости от направления отклонения текущего значения вылета от начального значения.
3. Способ по п.2, отличающийся тем, что регулировку скорости работы механизмов производят с учетом величины отклонения текущего значения вылета от начального значения.
4. Способ по п.1, отличающийся тем, что при определении начального и текущего значения вылета учитывают значение измеренной длины стрелы.
5. Способ по п.1, отличающийся тем, что допустимое отклонение вылета от запомненного значения задают в виде функции от текущих значений параметров работы крана.
6. Способ по п.1, отличающийся тем, что скорость подъема грузозахватного органа и изменения вылета регулируют в зависимости от текущих значений параметров работы крана.
7. Система уменьшения раскачивания груза при подъеме стреловым краном, содержащая органы управления механизмами крана, включающие рукоятки подъема/опускания груза и изменения вылета, вычислительно-управляющее устройство, датчики параметров крана, включающие датчик нагрузки, и формирователь сигналов управления механизмами крана, отличающаяся тем, что в систему введен выключатель режима подъема груза без раскачивания, датчики параметров крана дополнительно включают в себя датчик угла наклона стрелы и датчик крена, а вычислительно-управляющее устройство выполнено на основе микроконтроллера, снабженного запоминающим устройством, при этом к микроконтроллеру непосредственно или через согласующие устройства подключены датчик нагрузки, датчик угла наклона стрелы, датчик крена, выключатель режима подъема груза без раскачивания и формирователь сигналов управления механизмами крана, к которому дополнительно подключены органы управления механизмами крана.
8. Система по п.7, отличающаяся тем, что она снабжена датчиком длины стрелы, подключенным к вычислительно-управляющему устройству непосредственно или через дополнительное согласующее устройство.
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ПРИ ПОДЪЕМЕ ГРУЗА ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2312814C1 |
| JP 3018596 A, 28.01.1991 | |||
| US 2006074517 A1, 06.04.2006 | |||
| JP 9194188 A, 29.07.1997. | |||

