Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в устройствах управления и защиты от перегрузок и столкновений с препятствиями грузоподъемных кранов.
Известен способ управления грузоподъемным краном, основанный на измерении угла наклона и длины стрелы, нагрузки, расчете на их основе величины вылета и нагрузки на грузозахватном органе, сравнении действующего значения нагрузки с допустимым значением (грузоподъемностью) на данном вылете и в случае превышения действующим значением нагрузки на грузозахватном органе величины грузоподъемности - отключении движений крана, приводящих к росту нагрузки. Этот способ позволяет повысить эффективность работы крана за счет отключения только тех движений, которые могут привести к развитию аварийной ситуации и сохранению всех остальных движений крана. Путем ограничения нагрузки на грузозахватном органе можно защитить кран как от опрокидывания из-за потери устойчивости, так и грузовой канат, металлоконструкцию и механизмы крана от поломок из-за потери прочности. Способ реализован в устройстве, содержащем датчики положения оборудования крана, устройство ввода-вывода информации, цифровой вычислитель, внешнее запоминающее устройство, блок визуальной индикации, блок аварийной сигнализации и исполнительный блок (см. патент РФ на полезную модель №38747, В66С, 23/90, 10.07.2004).
Известен также способ управления стреловым краном, включающий определение положения оборудования крана путем измерения длины стрелы, угла наклона и угла поворота стрелы, определение нагрузки на грузозахватном органе, инициирование оператором движений оборудования крана путем воздействия на органы управления и отключение приводов оборудования крана при перегрузке. Этот способ обеспечивает защиту от перегрузки и опасных перемещений оборудования крана. Способ реализован в устройстве управления грузоподъемным краном, содержащем процессор, "n" датчиков положения оборудования крана (датчик длины, датчик угла наклона стрелы и датчик угла поворота стрелы), подключенных к соответствующим входам процессора, датчик нагрузки, выход которого подключен к "n+1-ому" входу процессора, блок усилителей и исполнительный блок. Процессор включает в себя блок задания допустимых координат грузозахватного органа, блок коррекции допустимых координат, блок задания начальных координат грузозахватного органа, блок определения допустимого вылета стрелы по нагрузке, блок определения проекции стрелы на горизонтальную плоскость, блок определения фактических координат грузозахватного органа и блок сравнения (см. патент РФ №2058929, В66С 23/90, 27.04.1996).
В известных устройствах характеристики отключения крана по допустимой нагрузке вносятся в постоянное запоминающее устройство, как правило, в виде таблиц, образующих параметры отключения. Характеристики отключения крана по допустимым координатам движения его оборудования вносятся в оперативное запоминающее устройство и могут изменяться при изменении положения крана относительно препятствия.
Общим недостатком известных способов управления грузоподъемными кранами является то, что не учитывается динамика перемещающегося груза и в зависимости от скорости движения могут возникать колебания груза низкой частоты. В отличие от помех отфильтровать эти колебания невозможно, так как для них постоянная времени фильтра имеет значительный уровень (несколько секунд), что недопустимо для срабатывания устройств защиты. Наличие же колебаний груза связано со снижением производительности, энергетическими потерями, а в некоторых случаях со столкновениями и поломкой оборудования. Другим недостатком известных способов управления грузоподъемными кранами является то, что в критических ситуациях происходит остановка крана, что в ряде случаев вызывает необходимость обходных или возвратных движений, т.е. снижение производительности и энергетические потери.
Задачей, на решение которой направлены заявляемые изобретения, является разработка способа и устройства управления грузоподъемным краном, которые обеспечивали бы повышенную безопасность и производительность работы грузоподъемного крана, а также снижение энергозатрат.
Для достижения поставленной задачи и других преимуществ предложен способ управления грузоподъемной машиной, включающий определение положения оборудования крана и нагрузки на грузозахватном органе, инициирование оператором движений оборудования крана путем воздействия на органы управления и отключение приводов оборудования крана при перегрузке, в котором:
до определения положения оборудования крана запоминают координаты препятствий на стройплощадке;
в памяти процессора с помощью программных средств формируют контуры препятствий и отображают их на дисплее;
по сигналам датчиков положения оборудования крана определяют координаты начального положения грузозахватного органа, задают координаты конечного положения грузозахватного органа (точки доставки грузозахватного органа с грузом или без груза), запоминают координаты начального и конечного положения грузозахватного органа и отображают начальное и конечное положение грузозахватного органа на дисплее;
при инициировании крановщиком движений оборудования крана определяют прогнозируемую траекторию перемещения грузозахватного органа и отображают ее на дисплее;
при отсутствии пересечения контуров препятствий прогнозируемой траекторией перемещения грузозахватного органа с учетом габаритов перемещаемого груза по координатам начального и конечного положения грузозахватного органа определяют направления независимых движений оборудования крана, каждого в отдельности, для доставки грузозахватного органа в конечную точку по кратчайшему пути за минимальное время;
при пересечении контуров препятствий прогнозируемой траекторией перемещения грузозахватного органа определяют оптимальную траекторию перемещения грузозахватного органа с учетом габаритов перемещаемого груза и моменты включения и останова приводов оборудования крана, запоминают их и отображают оптимальную траекторию на дисплее;
перемещение грузозахватного органа осуществляют в режимах гашения раскачивания груза, защиты крана от перегрузки и столкновений с препятствиями;
при приближении грузозахватного органа на заданное расстояние к точке его доставки снижают скорость перемещения грузозахватного органа с последующим торможением и остановом движений оборудования крана в точке доставки грузозахватного органа.
При этом контуры препятствий отображают на дисплее с дифференцированием по степени опасности перемещения возле них груза или оборудования крана.
Оптимальную траекторию перемещения грузозахватного органа определяют, например, путем автоматического перебора вариантов обхода препятствий с приоритетом движений оборудования крана в зависимости от вида препятствий и динамических свойств приводов оборудования крана.
Применительно к устройству, реализующему заявленный способ управления грузоподъемным краном, поставленная техническая задача достигается тем, что известное устройство управления грузоподъемным краном, содержащее процессор, "n" датчиков положения оборудования крана, подключенных к соответствующим входам процессора, и датчик нагрузки, выход которого подключен к "n+1-му" входу процессора, согласно изобретению дополнительно содержит блок задания координат препятствий и задатчик конечных координат грузозахватного органа, выходы которых подключены соответственно к "n+2-му" и "n+3-му" входам процессора, дисплей, первый вход которого подключен к первому выходу процессора, а второй вход - к выходу блока задания координат препятствий, и блок управления приводами, первый, второй и третий входы которого подключены соответственно ко второму, третьему и четвертому выходам процессора, при этом процессор приспособлен для:
определения контура препятствия и отображения его на дисплее;
определения координат грузозахватного органа и отображения на дисплее его начального и конечного положения;
определения прогнозируемой траектории перемещения грузозахватного органа и отображения ее на дисплее при инициировании оператором движений оборудования крана;
формирования сигналов независимых движений оборудования крана, каждого в отдельности, для доставки грузозахватного органа в конечную точку по кратчайшему пути за минимальное время, если прогнозируемая траектория не пересекает контуры препятствий с учетом габаритов перемещаемого груза;
определения оптимальной траектории перемещения грузозахватного органа с учетом габаритов перемещаемого груза и моментов включения и останова приводов, если прогнозируемая траектория пересекает контуры препятствий, и отображения оптимальной траектории на дисплее;
формирования сигналов движений оборудования крана с гашением раскачивания груза, защиты крана от перегрузки и столкновений с препятствиями;
снижения скорости перемещения грузозахватного органа при приближении его на заданное расстояние к точке доставки с последующим торможением и остановом движений оборудования крана в точке доставки грузозахватного органа.
Предпочтительно, процессор дополнительно приспособлен для отображения контуров препятствий с дифференцированием их по степени опасности перемещения возле них груза или оборудования крана.
Кроме того, процессор дополнительно приспособлен для определения оптимальной траектории перемещения грузозахватного органа путем автоматического перебора вариантов обхода препятствий с приоритетом движений оборудования крана в зависимости от вида препятствий и динамических свойств приводов оборудования крана.
Процессор может включать в себя блок задания начальных и конечных координат грузозахватного органа, блок определения фактических координат грузозахватного органа, блок определения пересечения траекторией перемещения грузозахватного органа контуров препятствий, блок определения фактической загрузки крана, блок гашения раскачивания груза, элемент «ИЛИ», два компаратора, блок определения режима движений, блок инициирования движений, блок снижения скоростей движения и блок останова движений оборудования, при этом:
выход блока определения фактических координат грузозахватного органа подключен к первым входам блока задания начальных и конечных координат грузозахватного органа, первого и второго компараторов;
выход блока гашения раскачивания груза подключен к первому входу блока останова движений;
выход блока определения фактической загрузки крана подключен ко вторым входам первого компаратора и блока останова движений;
выход блока задания начальных и конечных координат грузозахватного органа подключен к первым входам блока определения пересечения траекторией перемещения грузозахватного органа контуров препятствий, блока определения режима движений и первого компаратора, а также ко второму входу второго компаратора;
второй вход блока определения режима движений подключен к выходу блока определения пересечения траекторией перемещения грузозахватного органа контуров препятствий, а выход - к входу блока инициирования движений;
второй вход первого компаратора подключен к выходу элемента "ИЛИ", а выход - к входу блока снижения скоростей движения оборудования;
входы с первого по "n" блоков определения фактических координат грузозахватного органа, гашения раскачивания груза и определения фактической загрузки крана объединены и образуют соответствующие входы процессора;
входы "n+1-е" блоков гашения раскачивания груза и определения фактической загрузки крана объединены и образуют соответствующие входы процессора;
второй вход блока задания начальных и конечных координат грузозахватного органа образует "n+2-й" вход процессора;
первым выходом процессора является выход блока задания начальных и конечных координат грузозахватного органа, вторым выходом - выход блока инициирования движений, третьим выходом - выход блока снижения скоростей движения оборудования, четвертым выходом - выход блока останова движений.
Предлагаемое техническое решение обеспечивает возможность перемещения грузозахватного органа с грузом или без груза из начального положения в конечное положение в обход препятствий, имеющихся на площадке, а также обеспечивает активные меры по снижению динамических нагрузок на кран и повышение безопасности и производительности работ, а также снижение энергозатрат за счет исключения внезапных остановок механизмов крана при пересечении оборудованием крана границ рабочей зоны (зон координатной защиты) и перемещения грузозахватного органа по оптимальной траектории.
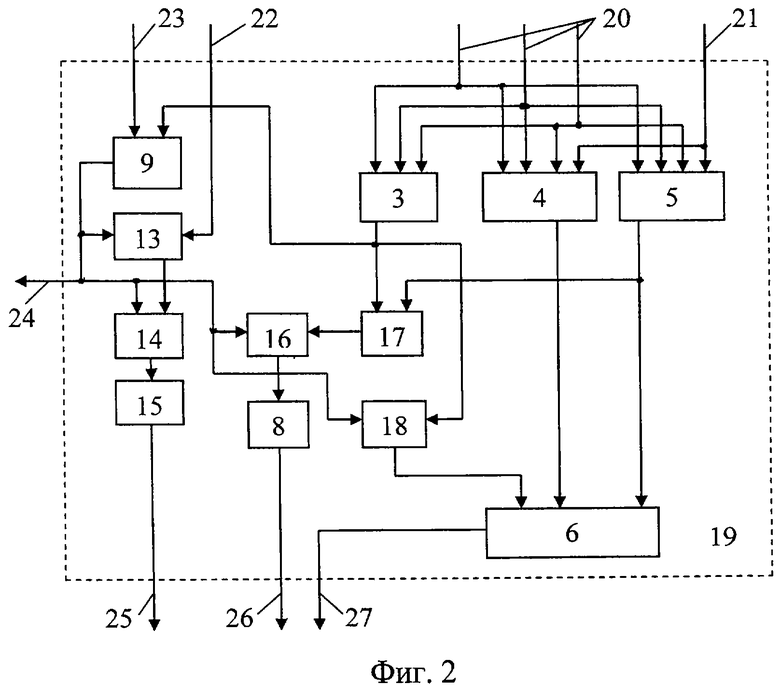
На фиг.1 представлена функциональная схема устройства, реализующего предложенный способ управления грузоподъемным краном; на фиг.2 - блок-схема процессора.
На чертежах приведены следующие обозначения:
1 - датчики положения оборудования крана;
2 - датчик нагрузки;
3 - блок определения фактических координат грузозахватного органа;
4 - блок гашения раскачивания груза;
5 - блок определения фактической загрузки крана;
6 - блок останова движений;
7 - блок управления приводами;
8 - блок снижения скоростей движения оборудования;
9 - блок задания начальных и конечных координат грузозахватного органа;
10 - задатчик конечных координат грузозахватного органа;
11 - дисплей;
12 - блок задания координат препятствий;
13 - блок определения пересечения траекторией перемещения грузозахватного органа контуров препятствий;
14 - блок определения режима движений;
15 - блок инициирования движений;
16 - первый компаратор;
17 - элемент "ИЛИ";
18 - второй компаратор;
19 - процессор;
20 - входы процессора для подключения датчиков положения оборудования;
21 - вход процессора для подключения датчика нагрузки;
22 - вход процессора для подключения блока задания координат препятствий;
23 - вход процессора для подключения задатчика конечных координат грузозахватного органа;
24 - первый выход процессора для подключения дисплея;
25 - второй выход процессора;
26 - третий выход процессора;
27 - четвертый выход процессора.
Предлагаемый способ управления грузоподъемным краном осуществляется следующим образом.
До начала работ записывают координаты препятствий, если таковые имеются на стройплощадке, в энергонезависимое перепрограммируемое запоминающее устройство. В памяти процессора устройства управления грузоподъемным краном с помощью программных средств формируют контуры препятствий и отображают их на дисплее. Контуры препятствий отображают на дисплее с дифференцированием препятствий по степени опасности перемещения возле них груза или оборудования крана (например, над некоторыми препятствиями нельзя проносить груз). Препятствия записывают в запоминающее устройство в одном из двух режимов: в режиме сохранения при отключенном питании (например, на стройплощадке с башенным краном препятствия вводятся и записываются с плана производства работ), а в случае, например, автомобильного крана - в режиме оперативной записи оператором (крановщиком).
До того как оператор начнет инициировать движение оборудования крана, по сигналам датчиков определяют координаты начального положения грузозахватного органа и нагрузку на грузозахватном органе, задают координаты конечного положения грузозахватного органа (точки доставки грузозахватного органа с грузом или без груза), записывают в оперативную память процессора координаты начального и конечного положения грузозахватного органа и отображают начальное и конечное положение грузозахватного органа на дисплее.
При инициировании крановщиком движений оборудования крана определяют прогнозируемую траекторию перемещения грузозахватного' органа и отображают ее на дисплее крана. При этом возможны два случая, когда прогнозируемая траектория перемещения грузозахватного органа не пересекает контуры препятствий или препятствия отсутствуют и когда прогнозируемая траектория пересекает эти контуры.
При отсутствии пересечения контуров препятствий прогнозируемой траекторией с учетом габаритов перемещаемого груза по координатам начального и конечного положения грузозахватного органа определяют направления независимых движений оборудования крана, каждого в отдельности, для доставки грузозахватного органа в конечную точку по кратчайшему пути за минимальное время.
При пересечении контуров препятствий прогнозируемой траекторией перемещения грузозахватного органа определяют оптимальную траекторию перемещения грузозахватного органа с учетом габаритов перемещаемого груза и моменты включения и останова приводов оборудования крана, запоминают их и отображают оптимальную траекторию на дисплее. Оптимальную траекторию можно определить путем перемещения грузозахватного органа с грузом в обход препятствий или путем автоматического перебора вариантов обхода препятствий с приоритетом движений оборудования крана в зависимости от вида препятствий и динамических свойств приводов оборудования крана. Критериями, определяющими приоритет движений оборудования крана, являются в первую очередь виды препятствий, а также динамические свойства приводов оборудования крана для обеспечения минимального времени перемещения.
Перемещение грузозахватного органа осуществляют в режимах гашения раскачивания груза, защиты крана от перегрузки и столкновений с препятствиями. При приближении грузозахватного органа на заданное расстояние к точке его доставки снижают скорость перемещения грузозахватного органа с последующим торможением и остановом движений оборудования крана в точке доставки грузозахватного органа. При торможении в результате воздействия оператора либо при срабатывании устройств защиты на базе вычисленных параметров движения осуществляют силовое оптимальное управление приводами оборудования крана с целью минимизации амплитуды раскачивания груза.
Устройство для осуществления данного способа управления грузоподъемным краном содержит процессор 19, "n" датчиков 1 положения оборудования крана, подключенных к соответствующим входам процессора 19, датчик 2 нагрузки, выход которого подключен к "n+1-му" входу процессора, блок 3 определения фактических координат грузозахватного органа, блок 12 задания координат препятствий, задатчик 10 конечных координат грузозахватного органа, выходы которых подключены соответственно к "n+2-му" и "n+3-му" входам процессора, дисплей 11, первый вход которого подключен к первому выходу процессора, а второй вход - к выходу блока 12 задания координат препятствий, и блок 7 управления приводами, первый, второй и третий входы которого подключены соответственно ко второму, третьему и четвертому выходам процессора.
На фиг.1 изображены условно только три датчика, контролирующие положение оборудования крана, которых, естественно, может быть больше. Для стрелового самоходного крана с телескопической стрелой это - датчики длины стрелы, угла наклона стрелы, угла поворота платформы и высоты подвеса крюка. Для других кранов, например для башенного крана, это - соответственно датчики пути, угла наклона стрелы (или перемещения тележки) и угла поворота платформы, высоты подвеса крюка, что не изменяет сути предлагаемого устройства.
Процессор 19 содержит блок 9 задания начальных и конечных координат грузозахватного органа, блок 3 определения фактических координат грузозахватного органа, блок 13 определения пересечения траекторией перемещения грузозахватного органа контуров препятствий, блок 5 определения фактической загрузки крана, блок 4 гашения раскачивания груза, элемент "ИЛИ" 17, первый компаратор 16, второй компаратор 18, блок 14 определения режима движений, блок 15 инициирования движений, блок 8 снижения скоростей движения и блок 6 останова движений оборудования.
Выход блока 3 определения фактических координат грузозахватного органа подключен к первым входам блока 9 задания начальных и конечных координат грузозахватного органа, первого 16 и второго 18 компараторов. Выход блока 4 гашения раскачивания груза подключен к первому входу блока 6 останова движений. Выход блока 5 определения фактической загрузки крана подключен ко вторым входам первого компаратора 16 и блока 6 останова движений. Выход блока 9 задания начальных и конечных координат грузозахватного органа подключен к первым входам блока 13 определения пересечения траекторией перемещения грузозахватного органа контуров препятствий, блока определения режима движений и первого компаратора 16, а также ко второму входу второго компаратора 18.
Второй вход блока 14 определения режима движений подключен к выходу блока 13 определения пересечения траекторией перемещения грузозахватного органа контуров препятствий, а выход - к входу блока 15 инициирования движений. Второй вход первого компаратора 16 подключен к выходу элемента "ИЛИ" 17, а выход - к входу блока 8 снижения скоростей движения оборудования.
Входы с первого по "n" блока 3 определения фактических координат грузозахватного органа, блока 4 гашения раскачивания груза и блока 5 определения фактической загрузки крана объединены и образуют соответствующие входы процессора 19.
Входы "n+1-е" блока 4 гашения раскачивания груза и блока 3 определения фактической загрузки крана объединены и образуют соответствующие входы процессора 19.
Второй вход блока 9 задания начальных и конечных координат грузозахватного органа образует "n+2-й" вход процессора 19.
Первым выходом процессора 19 является выход блока 9 задания начальных и конечных координат грузозахватного органа, вторым выходом - выход блока 15 инициирования движений, третьим выходом - выход блока 8 снижения скоростей движения оборудования, четвертым выходом - выход блока 6 останова движений.
Датчики 1 перемещения оборудования крана могут быть выполнены на базе контактных потенциометрических преобразователей или на базе индуктивных, кодовых или иных бесконтактных преобразователей.
Датчик 2 нагрузки представляет собой датчик усилия, устанавливаемый в механизм подъема стрелы или в механизм передачи усилия, или датчики давления, подключаемые к полостям гидроцилиндра подъема стрелы.
Блок 3 определения фактических координат грузозахватного органа, блок 4 гашения раскачивания груза и блок 5 определения фактической загрузки крана являются функциональными блоками, реализующими по сигналам датчиков 1 координатную защиту, гашение раскачивания и ограничение грузоподъемности крана.
Блок 6 останова движений - логическое устройство, контролирующее и объединяющее все сигналы запрета движений.
Блок 7 управления приводами представляет собой аппаратно-программное устройство, обеспечивающее включение и выключение двигателей по сигналам блоков 6, 8 и 15. Он может содержать усилительные и преобразовательные элементы в зависимости от типа приводов крана.
Блок 8 снижения скоростей движения оборудования представляет собой функциональный блок, в котором вычисляется минимальное расстояние до конечной точки, сравнивается с допустимым расстоянием по каждому движению и в случае достижения этого расстояния создается сигнал на снижение скоростей движения оборудования.
Блок 9 задания начальных и конечных координат грузозахватного органа - функциональный блок, воспроизводящий по сигналам блока 3 исходное (начальное) положение грузозахватного органа и вычисляющего его по сигналу органа 10.
Задатчик 10 конечных координат грузозахватного органа представляет собой устройство для нанесения на дисплей 11 и внесения в блок 9 точки конечного положения грузозахватного органа.
Дисплей 11 предназначен для предоставления оператору информации о положении крана на стройплощадке в плане и вертикальной плоскости стрелы, а также для контроля внесения в память устройства информации о препятствиях и конечной точки перемещения грузозахватного органа. Техническая реализация дисплея (как правило, на базе жидкокристаллических индикаторов) зависит от общей конфигурации устройства и способа внесения данных о препятствиях и конечной точки перемещения грузозахватного органа.
Блок 12 задания координат препятствий является функциональным блоком, обеспечивающим масштабирование и "привязку" крана к местности, в том числе к имеющимся препятствиям.
Блок 13 определения пересечения траекторией перемещения грузозахватного органа контуров препятствий, блок 14 определения режима движений (по каждому виду оборудования) и блок 15 инициирования движений представляют собой функциональные блоки, определяющие при наличии пересечений оптимальную траекторию для различных вариантов обхода препятствий и инициирующие движения после выбора варианта.
Компараторы 16 и 18 и элемент "ИЛИ" 17 представляют собой стандартные технические устройства, которые могут быть выполнены как средствами дискретной техники, так и программным способом.
Устройство работает следующим образом.
Предварительно блоком 12 с контролем по дисплею 11 устанавливаются виды и координаты препятствий (только для кранов самоходного типа, так как для кранов, "привязанных" к стройплощадке, данные о препятствиях переносятся автоматически из занесенных ранее в память блока 12 в соответствии с планом производства работ.
Затем оператор включает приборы безопасности крана и может приступать к работе.
Задатчиком 10 оператор вносит координаты конечной точки перемещения грузозахватного органа в блок 9 с контролем на дисплее 11 и инициирует начало движения. В случае, если прогнозируемая траектория перемещения грузозахватного органа пересечет контур препятствия, блоками 12 и 14 будет произведена блокировка движений и определена оптимальная траектория обхода препятствий. После этого блокировка будет снята и начнется движение оборудования крана с учетом алгоритма гашения раскачивания груза.
Останов движений оборудования крана производится автоматически с предварительным уменьшением скорости движения и последующей остановкой. Режимы предварительного снижения скорости и остановки характерны как для случая рабочего перемещения грузозахватного органа, так и в случае срабатывания любых средств защиты (по перегрузке, по перемещению и т.п.).
Предлагаемое устройство управления грузоподъемным краном может быть изготовлено промышленным способом на приборостроительном предприятии с использованием современных электронных компонентов и технологий. Для реализации предлагаемого устройства можно использовать микропроцессор MSP430F149 фирмы «Texas Instruments» (США) или другие микропроцессоры подобного типа, включающие аналого-цифровой преобразователь, мультиплексор, запоминающие устройства, параллельные и последовательные порты и т.д.
Описанное устройство является лишь частным примером реализации устройства управления грузоподъемным краном. Специалисту в данной области техники должно быть очевидным, что в настоящем изобретении возможны разнообразные модификации и изменения, в частности, в зависимости от типа крана может меняться состав датчиков и блоков устройства, перечень расчетных параметров и алгоритмы работы при сохранении сути изложенного устройства. Соответственно, предполагается, что настоящее изобретение охватывает указанные модификации и изменения, а также их эквиваленты без отступления от сущности и объема изобретения, раскрытого в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483997C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309112C1 |
| СПОСОБ ПОДДЕРЖКИ КРАНОВЩИКА ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОЙ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280608C2 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты от перегрузок и столкновения с препятствиями грузоподъемных кранов. Способ включает определение положения оборудования крана и нагрузки на грузозахватном органе, инициирование оператором движений оборудования крана и отключение приводов оборудования крана при перегрузке. До определения положения оборудования крана запоминают координаты препятствий на стройплощадке. В памяти процессора формируют контуры препятствий и отображают их на дисплее, а по сигналам датчиков положения оборудования крана определяют координаты начального положения грузозахватного органа, задают координаты конечного положения грузозахватного органа, запоминают и отображают их на дисплее. При инициировании крановщиком движений оборудования крана определяют прогнозируемую траекторию перемещения грузозахватного органа и отображают ее на дисплее. При отстутствии пересечения контуров определяют направления независимых движений оборудования крана, каждого в отдельности, для доставки грузозахватного органа в конечную точку по кратчайшему пути за минимальное время, а при пересечении контуров препятствий прогнозируемой траекторией перемещения грузозахватного органа определяют оптимальную траекторию, запоминают и отображают ее на дисплее. Перемещение грузозахватного органа осуществляют в режимах гашения раскачивания груза, защиты крана от перегрузки и столкновений с препятствиями, снижения скорости перемещения грузозахватного органа с последующим торможением и остановом движений. Устройство содержит процессоры, "n" датчиков положения оборудования крана, датчик нагрузки, блок задания координат препятствий и задатчик конечных координат грузозахватного органа, дисплей, блок управления приводами. Техническим результатом является снижение динамических нагрузок и повышение безопасности. 2 н. и 5 з.п. ф-лы, 2 ил.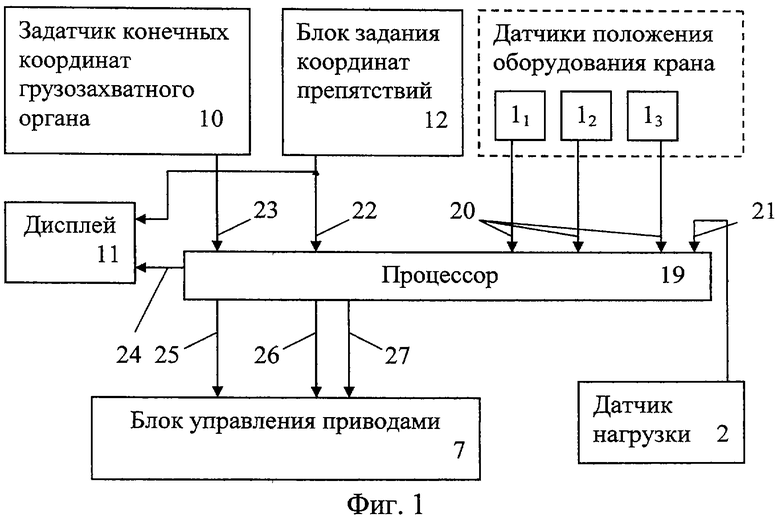
| КРАНОВОЕ ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 1989 |
|
RU2093452C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КООРДИНАТНОЙ ЗАЩИТЫ БАШЕННОГО КРАНА ПРИ РАБОТЕ В СТЕСНЁННЫХ УСЛОВИЯХ | 2002 |
|
RU2246441C2 |
| RU 2058929 C1, 27.04.1996 | |||
| US 2005192732 A1, 01.09.2005 | |||
| ДВИГАТЕЛЬ ВНУТРЕННЕГО ГОРЕНИЯ С КРИВОЛИНЕЙНО-ПАЗОВЫМ МЕХАНИЗМОМ | 1934 |
|
SU47868A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ СВЯЗУЮЩЕГО ВЕЩЕСТВА ДЛЯ ШИШЕЛЬНЫХ ЗЕМЕЛЬ | 1934 |
|
SU38747A1 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |

