Изобретение относится к области технических средств спутниковой, инерциальной навигации и гиростабилизации для морских объектов и может быть использовано на кораблях и судах в широком диапазоне условий плавания. При этом навигационные средства обеспечивают решение задач определения координат места, курса и скорости морского объекта, а гироскопические системы обеспечивают решение задач стабилизации бортовых приборов и выработки динамических параметров движения корабля. Спутниковые средства обеспечивают коррекцию инерциальной навигационной системы (ИНС).
В настоящее время известны и прошли испытания отечественные комплектации корректируемых ИНС [1], существенным недостатком которых является необходимость использования информации зарубежных спутниковых навигационных средств (GPS).
Известна также морская единая система инерциальной навигации и стабилизации (СИНС «Ладога-М») [2]. Система предназначена для выработки полного спектра выходных параметров инерциальной системы, необходимых для решения навигационных и других задач в штатных условиях функционирования средств коррекции навигационного комплекса корабля.
Разработка системы «Ладога-М» завершена в 1999 г., система прошла испытания в полном объеме и может быть принята в качестве прототипа изобретения.
Система-прототип представлена блок-схемой на фиг.2.
СИНС «Ладога-М» вырабатывает и выдает в технические средства следующую информацию:
- географические координаты места - широту и долготу;
- курс географический в плоскости горизонта;
- углы бортовой качки, измеренные в плоскости шпангоута, и углы килевой качки, измеренные в вертикальной плоскости;
- угловые скорости бортовой и килевой качки и изменения курса;
- две составляющие линейной скорости движения корабля относительно грунта в географической системе координат;
- три составляющие мгновенной скорости движения корабля в географической системе координат, вызванные качкой и орбитальным движением корабля в месте установки гироприбора;
- три составляющие линейного перемещения корабля в географической системе координат, вызванного качкой и орбитальным движением корабля в месте установки гироприбора;
- суммарный угол наклона палубы.
В системе реализован классический алгоритм ИНС полуаналитического типа с коррекцией. Корректирующие сигналы вырабатываются с помощью многомерного фильтра Калмановского типа.
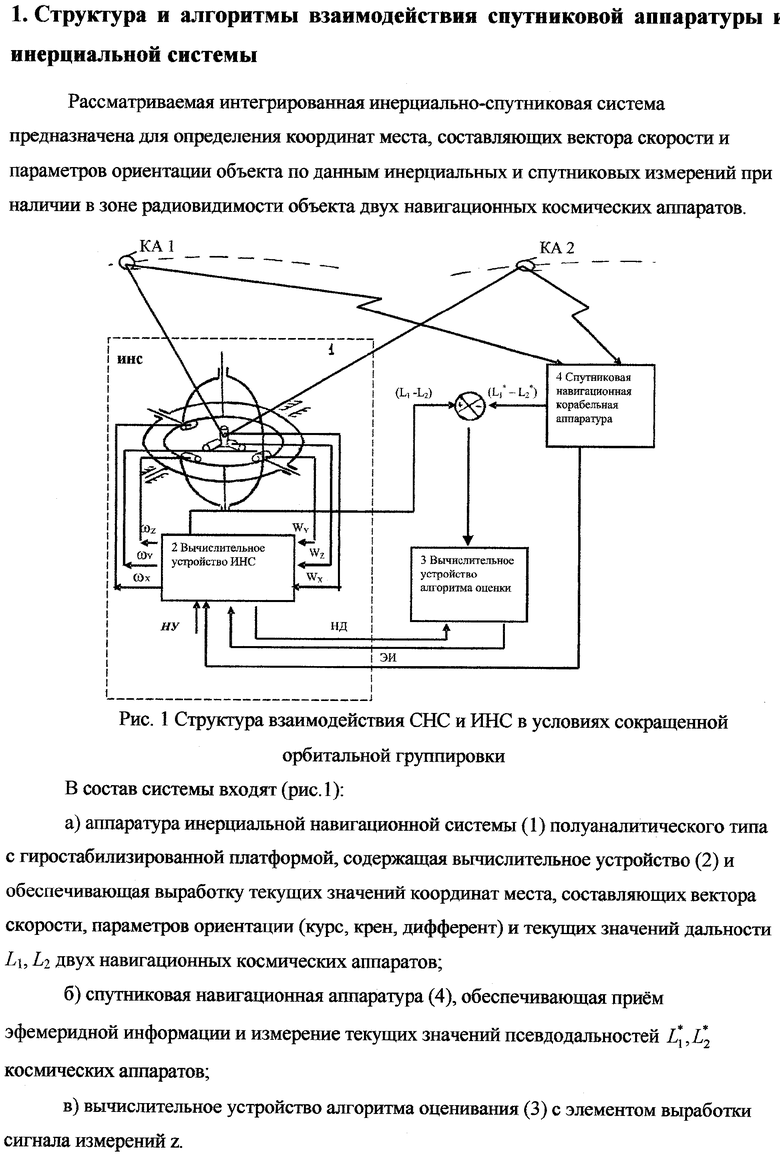
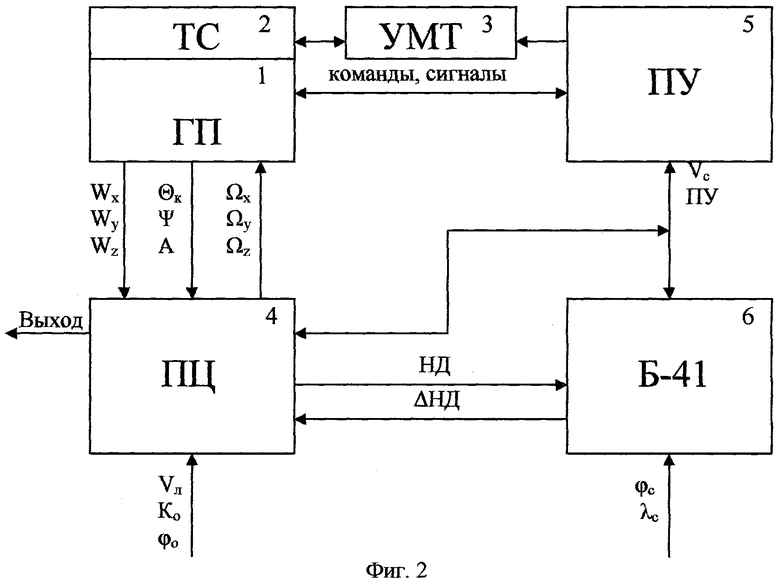
На фиг.2 представлена структура СИНС «Ладога-М». В состав системы входят ГП - гироприбор (1), ТС - прибор термостабилизации (2), УМТ - усилитель мощности термостабилизации (3), ПЦ - прибор цифровой (4), ПУ - прибор управления (5), Б-41 - ЭВМ «Багет-41» (6).
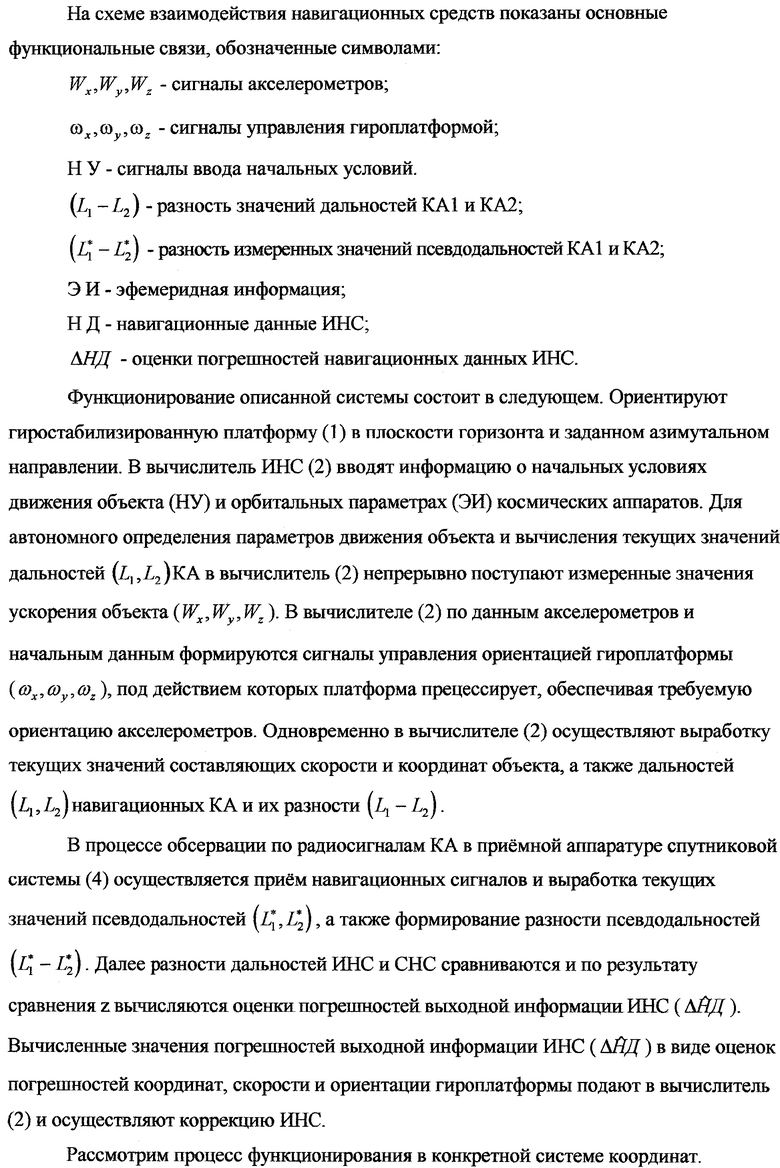
Система функционирует следующим образом. Из прибора ГП в прибор ПЦ через аналого-цифровые преобразователи поступают три составляющие ускорения (Wx, Wy, Wz), углы качки и азимутальный угол (θk, ψ,. А), а из прибора ПЦ в гироприбор ГП подаются управляющие сигналы ( Ωx, Ωy, Ωz).
Коррекция СИНС осуществляется путем выработки корректирующей информации (ΔНД) алгоритмами ЭВМ Б-41(6) по данным ПЦ (4) НД и приемной аппаратуры СНС, вырабатывающей информацию о координатах и скорости Vc, ПУ. Управление функционированием СИНС осуществляется по каналам «команды, сигналы».
В систему поступает следующая внешняя информация:
- скорость от лага Vл,
- грубый курс от гирокомпаса Ко,
- координаты ϕc, λc, скорость Vс и путевой угол от приемника СНС.
Система имеет два рабочих режима:
- корректируемый режим (КР),
- автономный режим (АР).
В каждом запуске системы производится калибровка системы, которая продолжается от 6 до 8 часов (в зависимости от условий эксплуатации). Калибровка требует поступления внешних позиционных и скоростных данных. Для КР используется информация от приемника СНС и лага, а в АР - только от лага.
Несмотря на высокие характеристики функционирования системы, показанные в процессе испытаний, нельзя не отметить существенные недостатки, касающиеся взаимодействия СИНС «Ладога-М» и средств коррекции.
Использование информации отечественной глобальной навигационной спутниковой системы (СНС ГЛОНАСС) для коррекции СИНС «Ладога-М» следует считать вполне оправданным. Высокие технические и эксплуатационные характеристики глобальных СНС, продемонстрированные в течение 20 лет существования, сделали спутниковую навигационную аппаратуру потребителей неотъемлемой составляющей множества навигационных комплексов и систем управления подвижных объектов.
Вместе с тем, будучи неавтономной радиотехнической навигационной системой, СНС показала себя зависимой от множества внешних факторов, влияющих на эффективность функционирования ее составных частей. Эти факторы влияют на количественный состав и состояние орбитальной группировки космических аппаратов (ОГ КА), на функционирование наземного комплекса управления (НКУ), на работу бортовой аппаратуры потребителей (АП). Кроме того, внешнему влиянию подвергаются каналы передачи информации СНС. Все перечисленные и другие возмущающие воздействия приводят к ухудшению характеристик функционирования системы коррекции и трудностям реализации корректируемого режима работы СИНС.
В нормальном состоянии СНС содержит ОГ из 21-24 КА, равномерно распределенных в околоземном пространстве. Согласно требованиям Международной Морской Организации действующая система должна обладать определенными свойствами. Основными эксплуатационными свойствами СНС являются доступность и целостность. Согласно [3] глобальная СНС в штатном режиме функционирования должна обеспечивать доступность >99,8% в течение 30 суток, а целостность системы должна быть <10 с. В современных реальных условиях функционирования СНС ГЛОНАСС система коррекции не удовлетворяет требованиям штатного режима. По разным причинам количество КА в зоне радиовидимости упало с 4-5 до 2-3 аппаратов. Доступность системы снизилась до уровня 10-20% [4]. Такие показатели не обеспечивают нормальную работу СИНС «Ладога-М» в корректируемом режиме.
Необходимо отметить, что столь низкая оценка доступности характеризует СНС, обеспечивающую определение координат объекта в пространстве. Для решения этой задачи требуется наличие в зоне радиовидимости не менее 4-х КА. Можно ожидать, что при определении координат места объекта на поверхности Земли доступность системы будет выше, так как для этого достаточно принять сигналы 3-х КА. Информацию 4-го КА в этом случае можно заместить данными о фигуре Земли. Очевидно, что показатель доступности СНС еще более возрастет, если приемная аппаратура потребителя сможет функционировать по сигналам 2-х КА.
Оценка информационных возможностей СНС при использовании различных комплектаций АП представляет несомненный интерес.
Количественная сравнительная оценка доступности СНС получена путем математического моделирования текущего состояния орбитальной группировки, положения объектов-потребителей на поверхности Земли и вычисления показателей доступности на интервале замыкания трасс полета КА.
В качестве примера рассмотрен процесс оценки доступности путем оценки вероятности непрерывного обслуживания (РОБ) СНС, орбитальная группировка которой содержит 9 КА, вместо 24 КА, необходимых в штатном режиме функционирования.
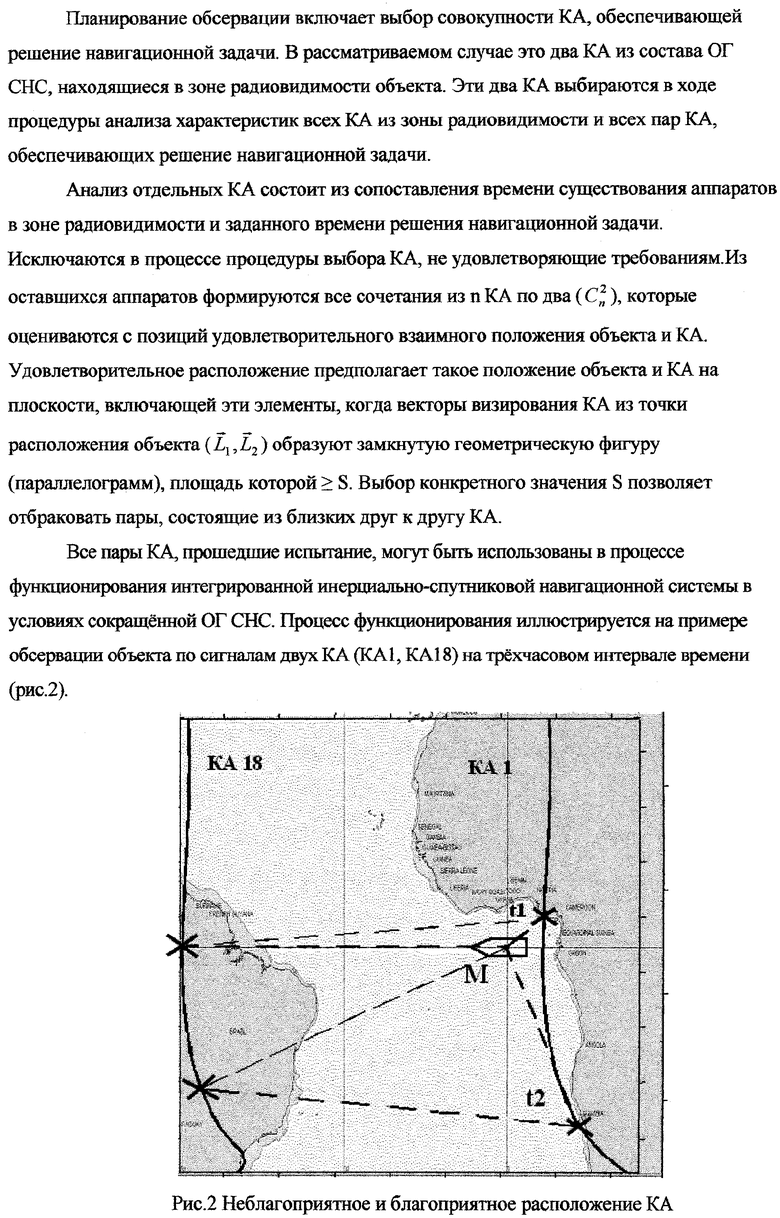
В качестве заданного района обслуживания рассмотрен участок поверхности Земли, ограниченный параллелями 70,0...89,9 градусов северной широты. На исследуемой поверхности заданы 200 точек случайного расположения объектов-потребителей. Заданный интервал времени - период замыкания трасс полета КА. Используемая аппаратура потребителей обеспечивает проведение навигационных определений по сигналам двух, трех и четырех КА, наблюдаемых в зоне радиовидимости объектов.
На фиг.1 показан фрагмент графиков изменения количества информативных комбинаций КА при работе аппаратуры потребителей по сигналам двух, трех или четырех КА. По оси абсцисс задано время, а по оси ординат отложено суммарное количество информативных комбинаций КА, наблюдаемых комплектациями аппаратуры всех двухсот потребителей. Среднее число информативных комбинаций КА на одного потребителя при работе по сигналам 2-х КА лежит в пределах 2,0...3,5. Та же оценка при работе по трем аппаратам равна 0...1,5 и по четырем - 0...0,75.
Соответствующие средние значения вероятности непрерывного обслуживания для рассматриваемых комплектаций аппаратуры потребителей равны: PОБ2=1,0; PОБ3=0,75; РОБ4=0,188.
Результаты сравнительной оценки доступности различных комплектаций приемной аппаратуры СНС убедительно свидетельствуют в пользу проведения навигационных определений по сигналам 2-х КА. Такая возможность возникает при комплексировании инерциальных и спутниковых навигационных средств.
Для изложения сущности комплексирования и коррекции, следуя [5], опишем динамический процесс изменения навигационных характеристик корабля системой нелинейных дифференциальных уравнений

где X0, Y0, U0 - матрицы-столбцы, отображающие вектор состояния, вектор выхода и вектор входа динамической системы;
F0, Ф0 - известные функции.
Корабельный комплекс навигационной аппаратуры предназначен для выработки параметров Y0 и с этой целью моделирует динамический процесс (1) в соответствии с уравнениями

Погрешности воспроизведения переменных X0, Y0, U0 системой (2) обозначим малыми буквами х, у, u.
В предположении малости погрешностей можно записать линейные уравнения ошибок системы

где 





Спутниковую навигационную аппаратуру, как средство коррекции системы (2), можно описать уравнением

где w - вектор погрешностей спутниковой аппаратуры.
При малых w функция YC может быть записана в виде

По данным системы (2) можно сформировать значение YA, эквивалентное YC, которое при наличии погрешностей запишется в виде

По данным выхода спутниковой системы (5) и автономной системы (6) можно сформировать разность

где  .
.
Вектор z содержит информацию о погрешностях системы, что позволяет решать задачу коррекции системы (2) путем введения связей по формуле

где Кk - матрица коэффициентов коррекции.
Кроме того, если компоненты вектора х наблюдаемы на выходе z, можно вычислить их оценки, реализуя алгоритм

где К - матрица коэффициентов алгоритма оценивания.
По результатам оценивания погрешностей х можно решать задачу коррекции системы (2) путем введения связей по формуле

Таким образом, в процессе комплексирования решаются задачи оценивания погрешностей и коррекции ошибок автономных навигационных средств.
Для решаемой задачи коррекции ИНС по данным СНС определяющим является формирование вектора измерений z, так как алгоритм (9) обеспечивает вычисление только тех компонент вектора погрешностей х, которые наблюдаемы на выходе z.
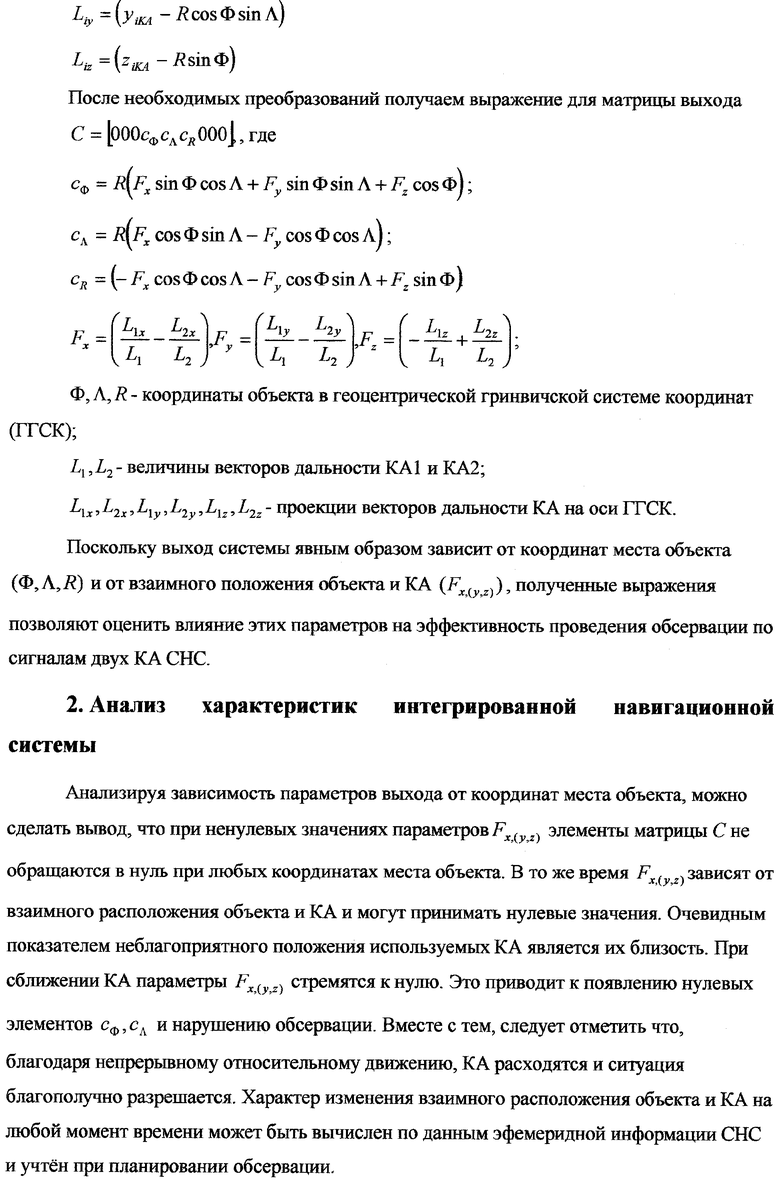
Для ИНС «Ладога-М» характерна полная наблюдаемость погрешностей х на выходах координат места ϕс и λс. Этого достаточно для реализации штатного корректируемого режима с использованием внешней информации СНС о координатах. В условиях сокращенной орбитальной группировки, ввиду недостатка видимых КА, выработка информации о координатах и коррекция СИНС по сигналам трех-четырех аппаратов маловероятна. В тех же условиях анализ доступности СНС при работе АП СНС по сигналам двух КА показал вероятность непрерывного обслуживания, равную единице. В этом режиме навигационная информация СНС принимается спутниковой аппаратурой в виде текущих значений координат КА в геоцентрической системе координат (эфемеридная информация) и измерений дальности и скорости видимых КА относительно потребителя (псевдодальность, псевдоскорость).
При использовании измерительной информации СНС необходимо учитывать, что измеряемые текущие значения псевдодальности и псевдоскорости обременены весьма существенными систематическими погрешностями, порожденными рассогласованием показаний часов КА и потребителей. Эти погрешности одинаковы для измерений по всем КА на конкретный момент времени. Систематические погрешности могут быть исключены или учтены при построении алгоритмов оценивания (9). В частном случае построения алгоритма оценивания, рассматриваемом ниже, исключение систематических погрешностей может быть осуществлено путем формирования разностей псевдодальностей двух КА.
Изложенные выше материалы свидетельствуют о необходимости решения задачи повышения надежности навигационных определений в современных реальных условиях функционирования КНС ГЛОНАСС.
В настоящее время КНС ГЛОНАСС не удовлетворяет требованиям штатного режима. По разным причинам количество КА в зоне радиовидимости упало с 4-5 до 2-3 аппаратов. Доступность системы снизилась до уровня 10-20% [4].
Техническое решение задачи осуществляется путем резервирования штатного канала коррекции системы независимым дополнительным каналом, обеспечивающим надежную выработку корректирующей информации. В качеств исходных данных для выработки сигналов коррекции используются данные эфемеридной информации и измерения псевдодальностей всех видимых КА. Технический результат, достигаемый изобретением, обеспечивает функционирование КНС по сигналам двух КА вместо четырех КА системы ГЛОНАСС. Это позволяет иметь в составе видимых аппаратов 2-3 вместо 4-5 КА. В работах компьютерный анализ данных [8] показал, что при нахождении в составе орбитальной группировки 8 КА доступность системы возрастает до 50-74%. Наращивание орбитальной группировки до 12 КА повышает показатель доступности до 76-94%.
Корректируемая система инерциальной навигации и стабилизации содержит гиростабилизированную платформу в трехосном кардановом подвесе с датчиками углов, на которой установлены три двухстепенных интегрирующих гироскопа и три линейных акселерометра. Система также содержит прибор цифровой, реализующий алгоритмы функционирования инерциальной системы, а также штатный и резервный блоки коррекции и переключатель коррекции. При этом выходы датчиков углов поворота колец карданова подвеса и выходы акселерометров соединены с входами прибора цифрового, один из выходов которого соединен с входом гиростабилизированной платформы, а другой соединен с блоками коррекции, выходы которых соединяются с прибором цифровым переключателем.
Управление системой осуществляется с пульта (ПУ), обеспечивающего формирование сигналов управления системой по команде К или КP, поступающей от аппаратуры потребителей СНС. По команде К включаются штатный (Б-41) или КP - резервный (РБК) блоки коррекции.
Способ коррекции СИНС в условиях сокращенной орбитальной группировки СНС разработан и исследован в работе [6].
Подробное описание способа коррекции ИНС и оценка точностных и динамических характеристик коррекции приведены в Приложении. Результаты исследований свидетельствуют о высокой эффективности используемого способа.
Приведенному описанию корректируемой системы инерциальной навигации и стабилизации соответствует структура, показанная на фиг.3. Структура сохраняет основные функциональные элементы и связи системы-прототипа и представляет новый элемент - резервный блок коррекции (РБК) и новые связи РБК с прибором цифровым и аппаратурой потребителя СНС, обеспечивающей выработку данных измерений и эфемеридной информации.
Введение в схему системы новых элементов и связей при использовании названной спутниковой информации обеспечивает выработку сигналов коррекции ИНС в условиях сокращенной орбитальной группировки СНС.
Предлагаемое техническое решение допускает снижение необходимого для проведения коррекции ИНС количества спутников в сети СНС в два раза, повышает доступность отечественной СНС «ГЛОНАСС» в современных условиях в 3-5 раз, обеспечивает повышение точности и надежности навигационных определений СИНС как в штатном, так и в резервном режимах функционирования.
Сущность изобретения поясняется чертежами, где представлены:
фиг.1 - графики моделирования обсерваций;
фиг.2 - блок-схема системы- прототипа;
фиг.3 - блок-схема предлагаемой системы.
Предлагаемая система представлена блок-схемой с функциональными связями на фиг.3 и характеризуется следующей совокупностью элементов и связей.
Корректируемая система инерциальной навигации и стабилизации содержит гиростабилизированную платформу (1) в трехосном кардановом подвесе с датчиками углов, на которой установлены три двухстепенных интегрирующих гироскопа и три линейных акселерометра. Система также содержит прибор цифровой (4), реализующий алгоритмы функционирования инерциальной системы, а также штатный (6) и резервный (7) блоки коррекции и переключатель коррекции (8). При этом выходы датчиков углов поворота колец карданова подвеса и выходы акселерометров соединены с входами прибора цифрового, один из выходов которого соединен с входом гиростабилизированной платформы, а другой соединен с блоками коррекции, выходы которых соединяются с прибором цифровым переключателем.
Управление системой осуществляется с пульта (ПУ), обеспечивающего формирование сигналов управления системой по команде К, поступающей от аппаратуры потребителей СНС. По команде К включаются штатный (Б-41) или резервный (РБК) блоки коррекции.
Структура сохраняет основные функциональные элементы и связи системы-прототипа и представляет новый элемент - резервный блок коррекции (РБК) и новые связи РБК с прибором цифровым и аппаратурой потребителя СНС, обеспечивающей выработку данных измерений и эфемеридной информации.
Взаимодействие резервного блока коррекции с элементами системы «Ладога-М» осуществляется в корректируемом режиме работы. Корректируемый режим включается по сигналам АН СНС К или КP, означающим поступление корректирующей информации. По сигналу К включется штатный КР. Аппаратура потребителя вырабатывает информацию о текущих значениях координат места объекта, на входы штатного блока коррекции (Б-41) поступают навигационные данные (НД) и спутниковая информация ϕс, λc, Vc. Алгоритмы Б-41 вырабатывают текущие значения поправок погрешностей СИНС (Δ НД), которые поступают на вход блока ПЦ в положении I контактов переключателя ПК.
По сигналу КP реализуется резервный КР. Аппаратура потребителя вырабатывает информацию о текущих значениях псевдодальностей, на входы резервного блока коррекции (РБК) поступают навигационные данные (НД) и спутниковая информация L1, L2, ЭИ. Алгоритмы РБК вырабатывают текущие значения поправок погрешностей СИНС (Δ НД), которые поступают на вход блока ПЦ в положении II контактов переключателя ПК.
Сведения, подтверждающие возможность осуществления изобретения, приведены в Приложении.
Литература
1. Морская навигационная техника. Справочник под общей редакцией Смирнова Е.П. - СПб.: «Элмор», 2002.
2. В.Г. Пешехонов, Б.Л. Шарыгин, Ю.В. Миронов. Единая система инерциальной навигации и стабилизации «Ладога-М». Морская радиоэлектроника. 2003. №1 (4), - С.26-30.
3. Ю.Г.Зурабов, И.Н.Мищенко. Требования морского флота к радионавигационному обеспечению. Навигация и гидрография. 1996. №2. - С.95-104.
4. М.И.Калинов и др. Оценка возможностей СНС ГЛОНАСС в условиях реальной деградации орбитальной группировки. Морская радиоэлектроника. 2002. №1, - С.32-34.
5. Парусников Н.А. Корректируемые инерциальные навигационные системы. Сборник «Развитие механики гироскопических и навигационных систем». - М.: Наука, 1973.
6. Резниченко В.И. Теоретические основы комплексирования космических и автономных навигационных средств.... Диссертация на соискание ученой степени доктора технических наук. - Л.: Гос. НИНГИ МО РФ, 1986.
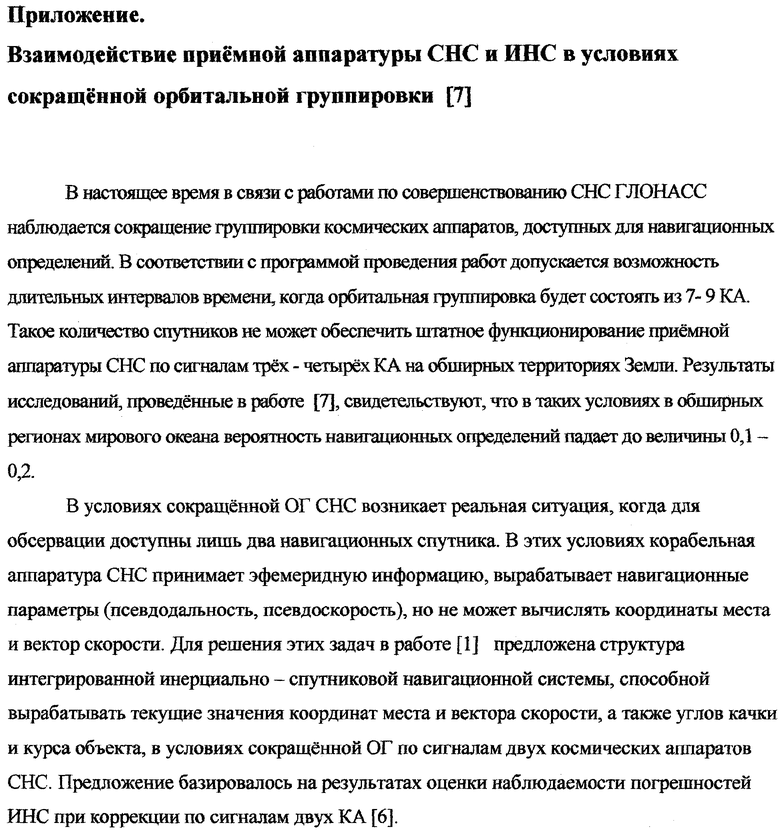
7. Б.В.Шебшаевич, В.А.Катенин, В.И.Резниченко. Реализация информационных возможностей СНС ГЛОНАСС в условиях сокращенной орбитальной группировки КА. Морская радиоэлектроника. 2003. №1 (4), - С.35-38.
8. М.И.Калинов, В.Д.Шинков, В.И.Резниченко. Повышение доступности системы ГЛОНАСС в условиях сокращения орбитальной группировки. Морская радиоэлектроника. 2005. 4 - С.29-32.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ ГИРОСКОПИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ МОРСКИХ ОБЪЕКТОВ | 2008 |
|
RU2428659C2 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2448326C2 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2506542C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| УЧЕБНАЯ АВИАЦИОННАЯ БОМБА С СИСТЕМОЙ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ | 2006 |
|
RU2319102C1 |
| СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА ПРИ ДВИЖЕНИИ ВНЕ АТМОСФЕРЫ | 1993 |
|
RU2062989C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ | 2011 |
|
RU2489675C2 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ НА ГОРИЗОНТЕ ПЛАВАНИЯ | 2007 |
|
RU2342746C1 |

Изобретение относится к области технических средств спутниковой, инерциальной навигации и гиростабилизации для морских объектов. Корректируемая инерпиальная система (ИНС), используя информацию гироскопов и акселерометров, обеспечивает автономную выработку навигационных и динамических параметров движения морского объекта, используя корректирующую информацию спутниковой навигационной системы (СНС) о координатах места объекта. В сложных условиях эксплуатации спутниковой системы, при сокращении орбитальной группировки космических аппаратов, реализуется резервный режим коррекции инерциальной системы по данным первичной измерительной. Система работает таким образом, что по данным внешней информации и навигационных данных ИНС формируются сигналы коррекции системы, что повышает точность навигационных определений в штатных условиях функционирования. 3 ил., приложение.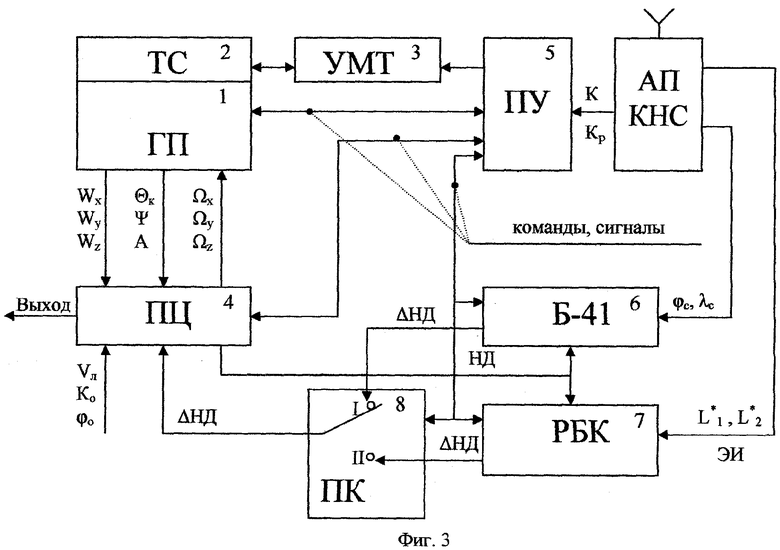
Корректируемая система инерциальной навигации и стабилизации, содержащая гиростабилизированную платформу в трехосном кардановом подвесе с датчиками углов, на которой установлены три двухстепенных интегрирующих гироскопа и три акселерометра, прибор цифровой, реализующий алгоритмы функционирования инерциальной системы, блок коррекции, обеспечивающий функционирование системы в штатном корректирующем режиме, причем выходы датчиков углов поворота колец карданова подвеса и выходы акселерометров гиростабилизированной платформы соединены с входами прибора цифрового, один из выходов которого соединен с входом гиростабилизированной платформы, а другой соединен с блоком коррекции, выход последнего соединен с прибором цифровым, отличающаяся тем, что система снабжена блоком резервной коррекции, обеспечивающим функционирование системы в нештатном корректируемом режиме и на который поступают выработанные аппаратурой потребителя эфемеридная информация и текущие значения псевдодальностей видимых космических аппаратов, а также переключателем канала коррекции, причем выходы блоков штатной и резервной коррекции соединены с входами переключателя каналов коррекции, выход которого соединен с входом прибора цифрового.
| ПЕШЕХОНОВ B.C | |||
| и др | |||
| Единая система инерциальной навигации и стабилизации «Ладога-М» | |||
| Морская радиоэлектроника, 2003, № 1(4), с.26-30 | |||
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2193754C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1988 |
|
RU2083954C1 |
| JP 2005285586 A, 13.10.2003 | |||
| JP 8021740 A, 23.01.1996. | |||

