Изобретение относится к навигационному приборостроению и может быть использовано для разработки точных автономных инерциальных навигационных систем.
Известен класс инерциальных навигационных систем (ИНС) полуаналитического типа со свободной в азимуте платформой, недостатком которых является наличие незатухающих колебательных составляющих погрешностей определения углов ориентации скоростей и координат объекта, вызываемых инструментальными погрешностями их элементов (погрешности начальной выставки гироплатформы, дрейф гироскопов, нулевые сигналы акселерометров и др.).
Известны ИНС, в которых для демпфирования указанных колебательных составляющих погрешностей используется информация от внешних, не входящих в состав ИНС, измерителей скоростей или координат объекта. Недостатками таких систем являются их автономность, сложность и дороговизна из-за применения динамических фильтров для обработки сигналов внешних измерителей скоростей и координат.
Известны также ИНС, в которых для демпфирования указанных выше колебательных составляющих погрешностей и для сохранения невозмущаемости гироплатформы скоростями и ускорениями объекта в каналах управления гироплатформой используются корректирующие устройства с передаточными функциями специального вида. Недостатком таких систем является сложность передаточных функций корректирующих устройств, в частности, высокий порядок полиномов числителя, что затрудняет их практическую реализацию.
Наиболее близкой по технической сущности к заявляемому устройству является ИНС, содержащая гироплатформу с акселерометром и гироскопом в каждом из двух горизонтальных каналов и гироскопом в азимутальном канале, две идентичные цепи, соответственно, в первом и втором горизонтальных каналах, каждая из которых выполнена в виде последовательно соединенных интегратора, соединенного своим входом с акселерометром соответствующего канала, первого масштабирующего блока, первого сумматора и усилителя, выход которого соединен с входом гироскопа соответствующего канала, а также второго масштабирующего блока, общий для обоих каналов блок определения координат и скоростей, первый и второй входы которого соединены с выходами интеграторов первого и второго каналов соответственно, причем в каждом канале выход второго масштабирующего блока соединен с вторым входом первого сумматора.
Целью изобретения является повышение точности определения углов ориентации, скоростей и координат в установившемся режиме горизонтального движения объекта с постоянной скоростью и постоянным курсом.
Цель достигается тем, что в известной ИНС в первый канал введены последовательно соединенные первый блок умножения, инвертор и второй сумматор, второй вход которого соединен с акселерометром первого канала, причем первый вход первого блока умножения соединен с выходом интегратора второго канала, во второй канал введены последовательно соединенные второй блок умножения и третий сумматор, причем второй вход третьего сумматора соединен с выходом акселерометра второго канала, а первый вход второго блока умножения соединен с выходом интегратора первого канала, введен также общий для обоих каналов масштабирующий блок, вход которого соединен с выходом блока определения скоростей и координат по сигналу синуса широты места.
В известных ИНС использование внутренних связей между их элементами для демпфирования колебаний гироплатформы приводит к ее возмущаемости параметрами движения объекта скоростью, ускорением, скоростью изменения ускорения. В предлагаемой ИНС, в отличие от известных технических решений, с помощью дополнительно введенных сумматоров, умножителей, масштабирующего элемента и инвертора формируются поправки к сигналам управления гироплатформой, обеспечивающие автономное демпфирование колебаний гироплатформы с сохранением ее невозмущаемости в установившемся режиме горизонтального движения объекта с постоянной скоростью и с постоянным курсом .
На фиг. 1 показана структурная схема ИНС; на фиг. 2 - функциональная схема блока вычисления скоростей и координат.
ИНС состоит (фиг. 1) из гироплатформы 1, связанной в двух горизонтальных каналах с первым 2 и вторым 3 акселерометрами и первым 4 и вторым 5 гироскопами, а в азимутальном канале - с третьим гироскопом 6, а также из первого 7 и второго 8 интеграторов и блока 9 определения скоростей и координат. Выходы первого 2 и второго 3 акселерометров подключены соответственно к входам первого 7 и второго 8 интеграторов, а также к первым входам девятого 10 и десятого 11 сумматоров, вторые входы которых связаны соответственно с выходом шестого умножителя 12 и через третий инвертор 13 с выходом седьмого умножителя 14. Первые входы шестого 12 и седьмого 14 умножителей связаны соответственно с выходами второго 8 и первого 7 интеграторов, а вторые входы через седьмой масштабирующий элемент 15 - с шестым выходом блока 9 вычисления скоростей и координат. Выходы девятого сумматора 10 и первого интегратора 7 соответственно через первый 16 и третий 17 масштабирующие элементы соединены с входами первого сумматора 18, выход которого через первый усилитель 19 коррекции подключен к входу первого гироскопа 4. Выходы десятого сумматора 11 и второго интегратора 8 соответственно через второй 20 и четвертый 21 масштабирующие элементы соединены с входами второго сумматора 22, выход которого через второй усилитель 23 коррекции подключен к входу второго гироскопа 5.
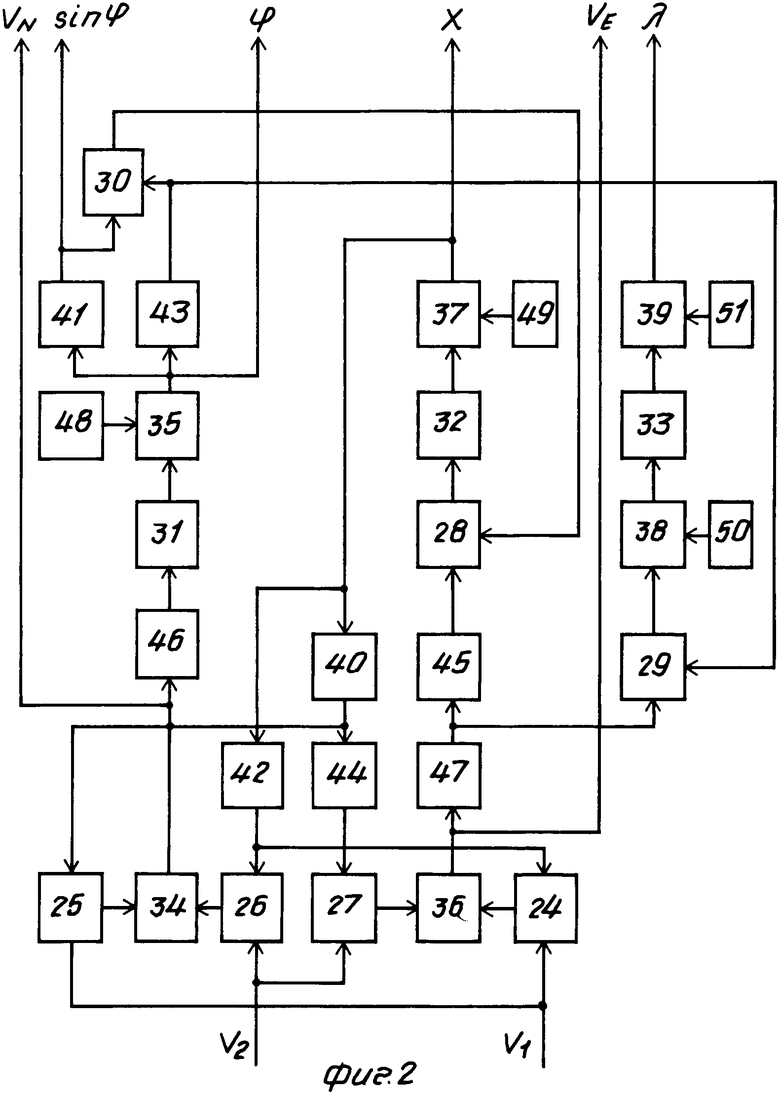
Блок 9 вычисления скоростей и координат состоит (фиг. 2) из пяти умножителей 24-28, первого 29 и второго 30 делителей трех интеграторов 31, 32, 33, шести сумматоров 34-39, первого 40 и второго 41 синусных преобразователей, первого 42 и второго 43 косинусных преобразователей, первого 44 и второго 45 инверторов, двух масштабирующих элементов 46, 47 и четырех задатчиков 48-51 сигналов.
Первые входы первого 24 и второго 25 умножителей соединены с выходом первого интегратора 7, а вторые входы - соответственно с выходами первого косинусного 42 и первого синусного 40 преобразователей. Первые входы третьего 26 и четвертого 27 умножителей соединены с выходом второго интегратора 8, второй вход третьего умножителя 26 и через первый инвертор 44 второй вход четвертого умножителя 27 подключены соответственно к выходам первого косинусного 42 и первого синусного 40 преобразователей. Выходы второго 25 и третьего 26 умножителей соединены с входами третьего сумматора 34, выход которого через пятый масштабирующий элемент 46 и третий интегратор 31 подключен к первому входу четвертого сумматора 35. В свою очередь второй вход последнего связан с выходом первого задатчика 48 сигналов, а выход - с входами второго синусного 41 и второго косинусного 43 преобразователей. Выходы первого 24 и четвертого 27 умножителей соединены с входами пятого сумматора 36, выход которого через шестой масштабирующий элемент 47 связан с первым входом первого делителя 29 и входом второго инвертора 45, подключенного к первому входу пятого умножителя 28. В свою очередь второй вход последнего соединен с выходом второго делителя 30, связанного входами с выходом второго синусного 41 и второго косинусного 43 преобразователей, а выход через четвертый интегратор 32 подключен к первому входу шестого сумматора 37. Второй вход последнего связан с выходом второго задатчика 49 сигналов, а выход - с входом первого синусного 40 и первого косинусного 42 преобразователей. Выход первого делителя 29, связанного вторым входом с выходом второго косинусного преобразователя 43, соединен с первым входом седьмого сумматора 38, второй вход которого подключен к выходу третьего задатчика 50 сигналов, а выход через пятый интегратор 33 - к первому входу восьмого сумматора 39, связанного вторым входом с выходом четвертого задатчика 51 сигналов. Выходы третьего 34, четвертого 35, пятого 36, шестого 37, восьмого 39 сумматоров и выход второго синусного преобразователя 41 являются первым-шестым выходами блока 9 вычисления скоростей и координат и одновременно выходами системы. Шестой выход блока 9 вычисления скоростей и координат - выход второго синусного преобразователя 41, подключен через седьмой масштабирующий элемент 15 к входам шестого 12 и седьмого 14 умножителей.
ИНС функционирует следующим образом.
В установившемся режиме движения объекта горизонтальные каналы управления, первый канал, первый акселерометр 2, девятый сумматор 10, первый масштабирующий элемент 16, первый интегратор 7, третий масштабирующий элемент 17, первый сумматор 18, первый усилитель 19 коррекции, первый гироскоп 4, второй канал, второй акселерометр 3, десятый сумматор 11, второй масштабирующий элемент 20, второй интегратор 8, четвертый масштабирующий элемент 21, второй сумматор 22, второй усилитель 23 коррекции, второй гироскоп 5 осуществляют ориентацию гироплатформы 1 относительно плоскости горизонта. При этом наличие в горизонтальных каналах управления связей по сигналам первого 2 и второго 3 акселерометров обеспечивает демпфирование колебаний гироплатформы 1. Третий гироскоп 6 осуществляет стабилизацию положения гироплатформы в азимуте относительно инерциального пространства, т.е. гироплатформа 1 является свободной в азимуте.
Выходные сигналы первого 2 и второго 3 акселерометров а1, а2поступают соответственно на входы первого 7 и второго 8 интеграторов, на выходах которых формируются сигналы, пропорциональные составляющим V1, V2 абсолютной скорости объекта, действующим по осям чувствительности первого 2 и второго 3 акселерометров.
С выходов первого 7 и второго 8 интеграторов сигналы поступают на входы блока 9 вычисления скоростей и координат, в котором в соответствии с функциональной схемой, показанной на фиг. 2, вычисляются следующие параметры по соответствующим зависимостям:
VE=V1cosχ-V2sinχ,
VN=V1sinχ+V2cosχ,
χ=χo-  (VE/R)tdϕdt, (1)
(VE/R)tdϕdt, (1)
ϕ=ϕo+  (VN/R)dt,
(VN/R)dt,
λ= λo+  (VE/Rcosω2ϕ-ω3)dt, где VE, VN - постоянная и северная составляющие абсолютной скорости объекта;
(VE/Rcosω2ϕ-ω3)dt, где VE, VN - постоянная и северная составляющие абсолютной скорости объекта;
χ - угол разворота гироплатформы в азимуте, положительное значение - при повороте платформы к западу от меридиана;
ϕ - географическая широта местоположения объекта;
λ - долгота местоположения объекта;
χo,ϕo,λo - начальные значения соответствующих координат;
ω3 - угловая скорость суточного вращения Земли;
R - радиус сферической модели Земли.
Значение угловой скорости суточного вращения Земли и начальные значения координат χo,ϕo,λo вводятся в схему блока 9 вычисления скоростей и координат с помощью имеющихся в ней третьего 50, второго 49, первого 48 и четвертого 51 задатчиков сигналов соответственно (фиг. 2).
Формируемые на выходах блока 9 вычисления скоростей и координат сигналы, пропорциональные составляющим VE, VN абсолютной скорости объекта и его координатам χ,ϕ,X, являются выходными для предлагаемой ИНС.
На вторые входы девятого 10 и десятого 11 сумматоров с выходов соответственно шестого умножителя 12 и третьего инвертора 13 подаются сигналы поправок Δa1,Δa2 , сформированные в соответствии со структурной схемой, показанной на фиг. 1, по следующим соотношениям:
Δa1=ω3V2sinϕ,
Δa2=-ω3V1sinϕ.(2)
Указанные связи в установившемся режиме горизонтального движения объекта с постоянной скоростью и постоянным курсом обеспечивают невозмущаемость гироплатформы 1 скоростью изменения абсолютного ускорения объекта при наличии в системе связей, обеспечивающих демпфирование колебаний гироплатформы 1.
Возможность достижения положительного эффекта в предлагаемом техническом решении подтверждается следующим.
Абсолютные ускорения w1, w2, действующие по осям чувствительности первого 2 и второго 3 акселерометров, определяются соотношениями (3):
w1= -ωЗv2sinϕ,
-ωЗv2sinϕ,
w2=  +ω3v1sinϕ, (3) где
+ω3v1sinϕ, (3) где  ,
,  - составляющие относительного ускорения объекта.
- составляющие относительного ускорения объекта.
При движении объекта с постоянной скоростью и постоянным курсом составляющие  ,
,  относительного ускорения равны нулю, т.е.
относительного ускорения равны нулю, т.е.  =
=  =0 . При условии, что погрешности ориентации α1,α2 гироплатформы 1 относительно плоскости горизонта - малы, в рассматриваемом случае движения объекта ускорения а1n, a2n измеряемые первым 2 и вторым 3 акселерометрами, в первом приближении описываются соотношением (4):
=0 . При условии, что погрешности ориентации α1,α2 гироплатформы 1 относительно плоскости горизонта - малы, в рассматриваемом случае движения объекта ускорения а1n, a2n измеряемые первым 2 и вторым 3 акселерометрами, в первом приближении описываются соотношением (4):
a1n=w1+ω3α2,
a2n=w2-ω3α1, (4) где ω3 = g(V12+V22)R - вертикальное ускорение.
В прототипе использование ускорений a1n, a2n для демпфирования колебаний гироплатформы 1 приводит к возмущению ее скоростью изменения абсолютного ускорения (2). При этом установившиеся погрешностиα1у,α2уориентации гироплатформы 1, которые впоследствии приводят к возникновению погрешностей на выходе системы, в первом приближении имеют вид (2)
α1у=-c ,
,
α2у= c2w1, (5) где с1, с2 - коэффициенты передачи первого 16 и второго 20 масштабирующих элементов.
Для рассматриваемого случая движения объекта = -
= -  ωЗv2(v1sinχ+v2cosχ),
ωЗv2(v1sinχ+v2cosχ), = -
= -  ωЗv1(v1sinχ+v2cosχ), (6) следовательно α
ωЗv1(v1sinχ+v2cosχ), (6) следовательно α
В предлагаемой ИНС сигналы поправок Δa1,Δa2, формируемые согласно (2), поступают на вторые входы девятого 10 и десятого 11 сумматоров, где складываются с сигналами первого 2 и второго 3 акселерометров. При этом установившиеся погрешности α1у, α2у ориентации гироплатформы 1 в первом приближении описываются соотношениями
α (w2+Δa2),
(w2+Δa2),
α (w1+Δa1) (7) Подставляя в (7) выражения (2) и (3) для рассматриваемого случая движения объекта, получают α1у=0,α2у=0 .
(w1+Δa1) (7) Подставляя в (7) выражения (2) и (3) для рассматриваемого случая движения объекта, получают α1у=0,α2у=0 .
Таким образом, в заявляемой ИНС, в отличие от прототипа, при горизонтальном движении объекта с постоянными скоростью и курсом сохраняется невозмущаемость гироплатформы 1 при наличии связей, обеспечивающих демпфирование ее колебаний. Это позволяет повысить точность определения углов ориентации, скоростей и координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления | 2015 |
|
RU2616087C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| ИЗМЕРИТЕЛЬ ПОЛОЖЕНИЯ ТРУБНОГО СТАВА | 1991 |
|
RU2031368C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2193754C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |

Изобретение относится к навигационному приборостроению и может быть использовано для разработки точных автономных инерциальных навигационных систем. Цель изобретения - повышение точности определения углов ориентации скоростей и координат в установившемся режиме горизонтального движения объекта с постоянной скоростью и постоянным курсом. Инерциальная система состоит из свободной в азимуте гидростабилизированной платформы и вычислительного блока, в котором по сигналам акселерометров вычисляются составляющие абсолютной скорости движения и координаты. Новым в системе является то, что сигналы акселерометров подаются на двигатели стабилизации платформы с корректирующей поправкой. Поправка формируется по составляющим абсолютной линейной скорости из перекрестных каналов с учетом широты места. Такая схема демпфирования позволяет уменьшить возмущаемость системы, следовательно повысить точность. Эффект особенно ощутим при работе системы более 1 ч. 2 ил.
ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, содержащая гироплатформу с акселерометром и гироскопом в каждом из двух горизонтальных каналов и гироскопом в азимутальном канале, две идентичные цепи соответственно в первом и втором горизонтальных каналах, каждая из которых выполнена в виде последовательно соединенных интегратора, соединенного своим входом с акселерометром соответствующего канала, первого масштабирующего блока, первого сумматора и усилителя, выход которого соединен с входом гироскопа соответствующего канала, а также второго масштабирующего блока, общий для обоих каналов блок определения координат и скоростей, первый и второй входы которого соединены с выходами интеграторов первого и второго каналов соответственно, причем в каждом канале выход второго масштабирующего блока соединен с вторым входом первого сумматора, отличающаяся тем, что, с целью повышения точности определения углов ориентации, скоростей и координат в установившемся режиме горизонтального движения объета с постоянной скоростью и постоянным курсом, в первый канал введены последовательно соединенные первый блок умножения, инвертор и второй сумматор, второй вход которого соединен с акселерометром первого канала, причем первый вход первого блока умножения соединен с выходом интегратора второго канала, во второй канал введены последовательно соединенные второй блок умножения и третий сумматор, причем второй вход третьего сумматора соединен с выходом акселерометра второго канала, а первый вход второго блока умножения соединен с выходом интегратора первого канала, введен также общий для обоих каналов масштабирующий блок, вход которого соединен с выходом блока определения скоростей и координат по сигналу синуса широты места, а выход соединен с вторыми входами первого и второго блоков умножения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Самотокин Б.Б | |||
| и др | |||
| Навигационные приборы и системы | |||
| Киев: Вища школа, 1986. | |||
