Область техники, к которой относится изобретение
Изобретение относится к области инерциальных гироскопических систем, используемых на транспортных средствах: морских судах, самолетах, автомобилях, в аппаратуре железнодорожных вагонов-путеизмерителей.
Уровень техники
Известны инерциальные навигационные системы, содержащие платформу в кардановом подвесе, установленные на ней азимутальный и горизонтальные гироскопы с управляемой скоростью прецессии, акселерометры, первые интеграторы, включенные через масштабирующие блоки между выходами акселерометров и входом для управления прецессией горизонтальных гироскопов, вторые интеграторы, подключенные к выходам первых интеграторов, причем интегратор, вырабатывающий широту места, через масштабирующий блок и блок вычисления синуса и косинуса широты присоединен также к входам управления гироскопами, внешний измеритель параметров движения (например, лаг на судне, доплеровский измеритель скорости на самолете, приемник спутниковой навигационной системы и т.п.), присоединенный ко входу фильтра Калмана, выходы которого подключены к сумматорам смещения нуля акселерометров и ко входам для управления горизонтальными гироскопами.
Таким образом, речь идет о платформенной инерциальной системе полуаналитического типа, в которой коррекция осуществляется за счет данных внешних измерителей, обработка которых совместно с данными, вырабатываемыми инерциальной системой, производится с помощью фильтра Калмана, включенного как блок обратной связи.
Прототипом настоящего изобретения является инерциальная система, описанная в книге С.С. Ривкина, В.И. Ивановского, А.В. Кострова "Статистическая оптимизация навигационных систем", Л.: Судостроение, 1976, 280 стр.
На л. 253, рис.8.14б приведена соответствующая структурная схема, а на стр. 234 на рис.8.8 - схема включения фильтра Калмана в один из каналов построения вертикали, в котором также вырабатывается широта.
На схеме рис. 8.8 выходы фильтра Калмана присоединены ко входу первого интегратора (сумматор смещения нуля акселерометра) и ко входу управления горизонтальным гироскопом, причем корректирующие сигналы соответственно обозначены L1(t) и L2(t).
Эти сигналы в соответствии с выражениями (7.10) той же книги формируют в следующем виде:

где
 - оценка фильтром Калмана смещения нуля акселерометра;
- оценка фильтром Калмана смещения нуля акселерометра; оценка скорости ухода гироскопа;
оценка скорости ухода гироскопа;
K1, K2 - элементы вектора коэффициентов усиления фильтра Калмана;
VИНС - значение скорости, вырабатываемой ИНС;
VВН - значение скорости, полученное от внешнего измерителя:
R - радиус Земли.
Такая схема выработки корректирующего сигнала обладает следующими недостатками:
1. Имеющаяся конфигурация предлагается для непрерывной формы фильтра Калмана, реализация которой для систем высокого порядка, какими являются инерциальные навигационные системы, затруднена или просто невозможна. Вектор состояния платформенных ИНС имеет 30-40 порядок, так что даже при современной высокопроизводительной вычислительной технике частота итераций не может быть выше 0,2-1 Гц. Между тем, контуры построения вертикали в современных ИНС работают, как правило, на частоте 50-100 Гц.
2. Решение задачи в рассматриваемой конфигурации возможно только путем построения субоптимального фильтра, когда частоту решения фильтра Калмана выбирают из условия реализуемости, коэффициенты K1 и К2 из выражений (1) удерживают постоянными на интервале решения, а измерения ZB и, соответственно, L1(t) и L2(t) вычисляют на частоте работы внутреннего контура ИНС. Такое решение неизбежно приводит к понижению точности работы ИНС.
3. Известное решение не учитывает также возможные технические ограничения величины управления, т.е. возможной максимальной скорости прецессии гироскопа, требуемое оптимальное значение которой при возможных начальных отклонениях гироплатформы почти во всех случаях технически недостижимо. Такие ограничения на практике приводят к нарушениям в работе фильтра Калмана и, во всяком случае, снижают требуемую точность и увеличивают время переходных процессов.
Сущность изобретения
Целью заявляемого изобретения является повышение точности работы ИНС и минимизация времени переходного процесса при выставке системы в условиях ограничений по возможной скорости прецессии гироскопов.
Сущность изобретения состоит в том, что между входами управления прецессией гироскопов, входами сумматоров смещения нуля акселерометров и выходами фильтра Калмана введено устройство выработки дискретного корректирующего сигнала, состоящее из блока формирования матрицы влияния управления, подключенной к блоку формирования переходной матрицы управления, выход которого соединен с блоком усечения матриц, второй вход которого соединен с фильтром Калмана; один выход блока усечения соединен с блоком умножений, а второй выход, передающий усеченную матрицу влияния через блок инверсии, присоединен ко второму входу блока умножений, третий вход которого связан с фильтром Калмана, при этом выход умножения подключен ко входу блока формирования суммарного управления, выходы которого через блок ограничения и контроля допустимого уровня управления присоединены ко входам управления горизонтальными гироскопами и входами сумматоров смещения нуля акселерометров, причем выходы блока ограничения, кроме того, через блок учета управления присоединены к соответствующим входам фильтра Калмана.
Перечень фигур чертежей
На фиг. 1 представлена структурная схема ИНС, корректируемой с помощью фильтра Калмана в линии обратной связи.
На фиг.2 представлена структурная схема инерциальной системы, на которой показаны 4 входа по управляющим сигналам, обозначенные Ux, Uy, U1x, U1y. К тем же входам присоединены выходы фильтра Калмана по соответствующим оценкам.
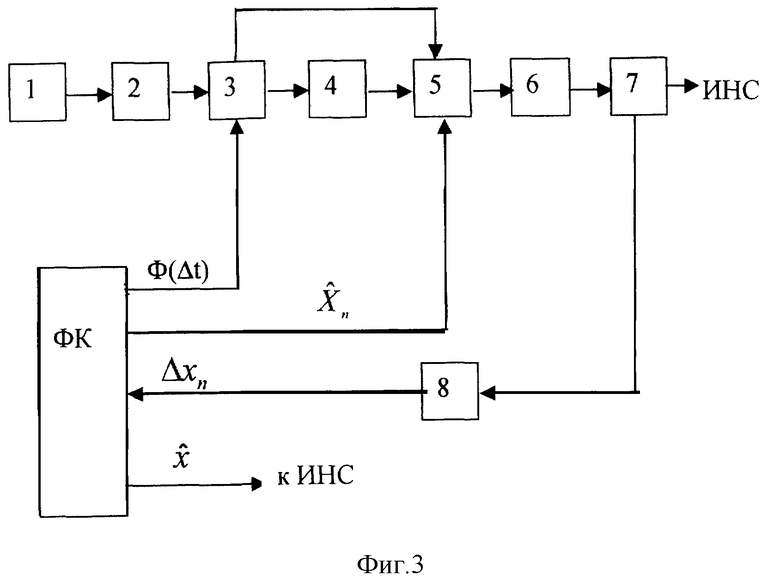
На фиг. 3 представлена структурная схема блоков, включенных между выходами ФК и входами управления ИНС, где обозначены:
1 - блок формирования матрицы влияния управления;
2 - блок формирования переходной матрицы;
3 - блок усечения матриц;
4 - блок инверсии;
5 - блок умножения;
6 - блок формирования суммарного управления;
7 - блок ограничения и контроля допустимого уровня управления;
8 - блок учета управления.
Сведения, подтверждающие возможность осуществления изобретения
Из фиг.1 следует, что блок формирования матрицы влияния управления 1 через блок формирования переходных матриц 2 подключен к входу блока усечения матриц 3, на другой вход которого включен выход фильтра Калмана, формирующий матрицу переходного состояния. Блок усечения по выходу усеченной матрицы состояния присоединен ко входу блока умножения 5, два других входа которого присоединены - через блок инверсии 4 - выход блока усечения по матрице влияния управления и непосредственно - выход фильтра Калмана по соответствующим оценкам.
Выход блока умножения 5 через блок формирования суммарного управления 6 и блок ограничения и контроля 7 подключен к соответствующим входам управления ИНС (см. фиг.2).
Кроме того, выход блока 7 через блок учета управления 8 присоединен к фильтру Калмана.
В блоке 1 формируется матрица влияния управления, представляющая собой единичную матрицу того же порядка, что и вектор состояния, оцениваемый фильтром Калмана. Эта матрица преобразуется в переходную в блоке 2 с помощью алгоритма расчета матричного ряда на интервале дискретности работы фильтра Калмана Δt (см., например, книгу авторов С.С. Ривкина, В.И. Ивановского, Л. В. Кострова "Статистическая оптимизация навигационных систем", Л.: Судостроение, 1976, 93 стр., выр.5.45).
В блоке 3, на вход которого передается переходная матрица состояния из фильтра Калмана и переходная матрица влияния управления, вычисленная в блоке 2 из указанных матриц, выделяются блоки, соответствующие вектору управлений, обозначенные соответственно:
(Т-индекс транспонирования матрицы),
Фу - блок переходной матрицы состояния (размерность 4х4);
Гу - блок переходной матрицы влияния управления (размерность 4х4).
В блоке 4 матрица Гу инвертируется (находится обратная матрица Гу -1).
Матрицы Фу и Гу -1 передаются на вход блока 5, куда также вводится оценка вектора состояния с выхода фильтра Калмана.
где α, β - погрешности горизонтирования,
ΔVE, ΔVN - погрешности выработки составляющих скорости.
Матрица управлений рассчитывается в блоке умножения 5 по формуле:
При такой технологии расчета полученные значения управлений, постоянные на интервале дискретности Δt, таковы, что приводят платформу за указанный интервал в нулевое (горизонтальное) положение.
Иначе говоря, к началу следующего интервала  Таким образом, задача дискретного демпфирования для дискретного фильтра Калмана оказывается решенной и, соответственно, повышается точность выработки навигационных параметров (например, за счет отсутствия переходных процессов, неизбежных при линейном или субоптимальном демпфировании).
Таким образом, задача дискретного демпфирования для дискретного фильтра Калмана оказывается решенной и, соответственно, повышается точность выработки навигационных параметров (например, за счет отсутствия переходных процессов, неизбежных при линейном или субоптимальном демпфировании).
С помощью остальных блоков анализируется соответствие выработанного значения управления имеющимся возможностям и в случае превышения заданного предела ведется учет неполноты управления с целью оптимизации переходного процесса.
В блоке 6 формируется суммарное управление, подаваемое через блок 7 на вход управления прецессией в ИНС:
Usi=Ui+mΔtU1i, (i=x,y),
где m - коэффициент.
В блоке ограничения управления 7 анализируется величина суммарного управления. Если она не превышает заданное максимальное значение Umax, то передается на управление, если превышает, то передается Umax и вычисляются коэффициенты неполноты управления
i=x,y при Usi>Umax (при Usi≤Umax KHi=0).
В блоке учета управления 8 вычисляется остаточный вектор оценок ΔХn, возникающий за счет недостаточности управления (отличие вектора Хn от 0 к концу интервала управления).
ΔXj=Xj(1-KHi), j=0...3; i=x,y.
Этот вектор передается в фильтр Калмана для учета на следующем шаге.
Таким образом, решается задача, чаще всего возникающая при начальной выставке ИНС, когда стабилизированная платформа отклонена на большие углы от горизонта и движется на максимальной скорости Umax к нулевому положению (т. е. время переходного процесса - минимально возможное).
Изобретение было проверено в составе ИНС "Ладога-М" на стендовых и объектовых испытаниях, где были подтверждены указанные выше преимущества [Акт межведомственных испытаний опытного образца комплекса центральных приборов СГС "Дельта" (изделие "Ладога-М" 1998 г.)].
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2233431C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
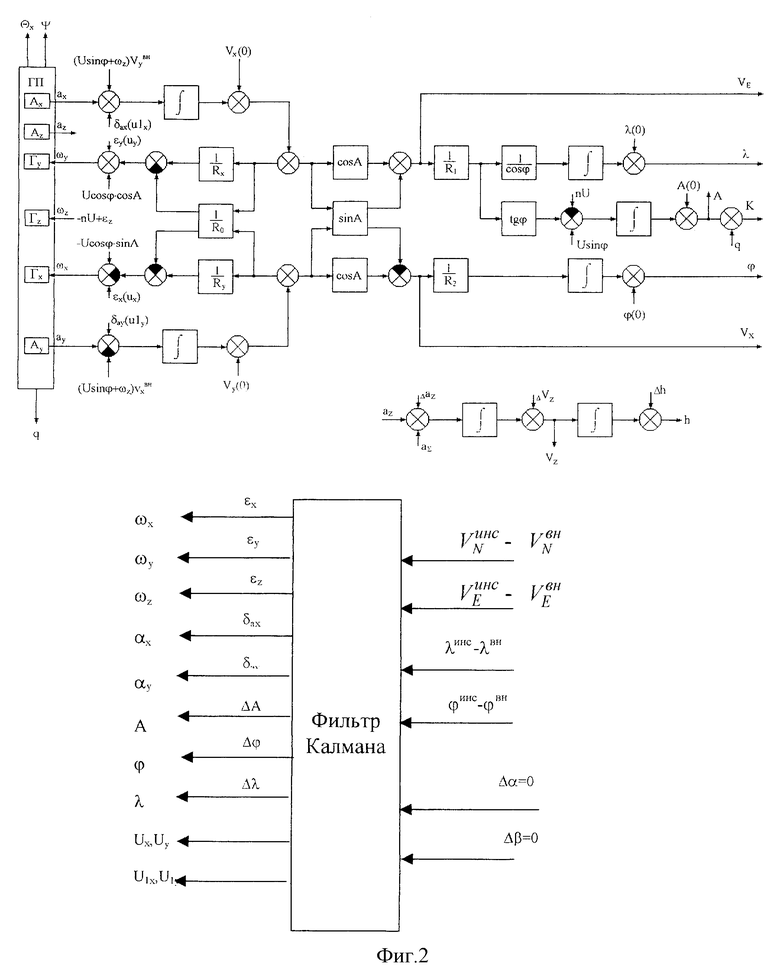
Система предназначена для использования на транспортных средствах (морских судах, самолетах, автомобилях и т.п.), интегрированных с другими измерителями навигационной информации. Технический результат - повышение точности работы системы и выставка системы за минимальное время. Система содержит платформу в кардановом подвесе, гироскопы, акселерометры, измеритель параметров движения, связанный со входом фильтра Калмана. Между входами управления гироскопами, входами сумматоров смещения нуля акселерометров и выходами фильтра Калмана введено устройство выработки дискретного корректирующего сигнала, состоящее из блока формирования матрицы влияния управления, блока формирования переходной матрицы управления, блока усечения матриц, блока умножения, блока инверсии, блока формирования суммарного управления, блока ограничения и контроля допустимого уровня управления и блока учета управления. 3 ил.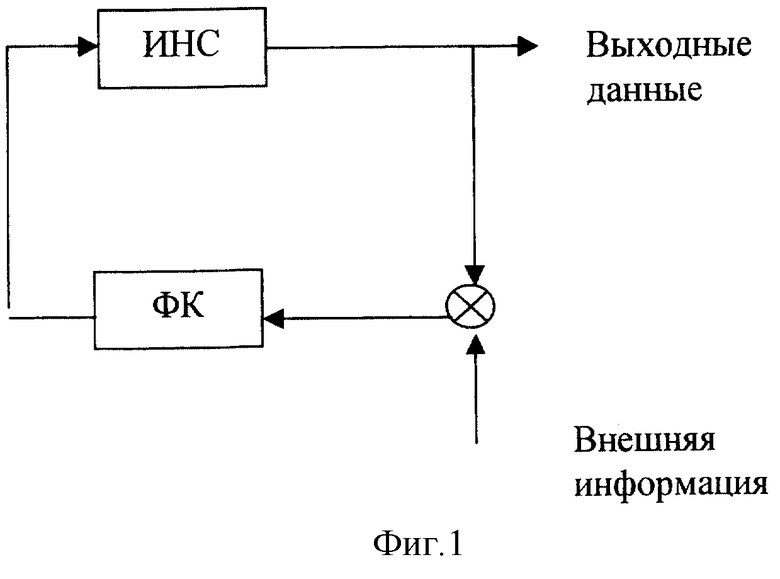
Инерциальная навигационная система, содержащая платформу в кардановом подвесе, азимутальный и горизонтальные гироскопы с управляемой скоростью прецессии, акселерометры, первые интеграторы, подключенные через масштабирующие блоки между выходами акселерометров и входом для управления гироскопами, вторые интеграторы, подключенные к выходам первых интеграторов, причем один из вторых интеграторов, вырабатывающий широту места, через масштабирующий блок и блок вычисления синуса и косинуса широты соединен с входами управления гироскопами, внешний измеритель параметров движения, соединенный со входом фильтра Калмана, выходы которого подключены к сумматорам смещения нуля акселерометров и входам для управления горизонтальными гироскопами, отличающаяся тем, что между входами управления гироскопами, входами сумматоров смещения нуля акселерометров и выходами фильтра Калмана введено устройство выработки дискретного корректирующего сигнала, состоящее из блока формирования матрицы влияния управления, подключенной к блоку формирования переходной матрицы управления, выход которого соединен с блоком усечения матриц, второй вход которого соединен с фильтром Калмана, один выход блока усечения соединен с блоком умножений, а второй выход, передающий усеченную матрицу влияния управления, через блок инверсии присоединен ко второму входу блока умножений, третий вход которого связан с фильтром Калмана, при этом выход блока умножений подключен ко входу блока формирования суммарного управления, выходы которого через блок ограничения и контроля допустимого уровня управления соединены со входами управления гироскопами и входами сумматоров смещения нуля акселерометров, причем выходы блока ограничения через блок учета управления соединены с соответствующими входами фильтра Калмана.
| С.С | |||
| РИВКИН и др | |||
| Статистическая оптимизация навигационных систем | |||
| - Л.: Судостроение, 1976, с | |||
| Прибор для измерения угла наклона | 1921 |
|
SU253A1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1995 |
|
RU2110769C1 |
| US 5359889, 01.11.1994. | |||

