Изобретение относится к области корректируемых по навигационным спутникам инерциальных систем навигации и гиростабилизации для морских объектов и может быть использовано на кораблях и судах в широком диапазоне условий плавания. При этом инерциальные системы обеспечивают решение задач определения координат места, курса и скорости морского объекта, а также решение задач ориентации и стабилизации бортовых приборов, комплексов оружия и выработки динамических параметров движения корабля. Спутниковые средства обеспечивают периодическую коррекцию инерциальной навигационной системы (ИНС).
В настоящее время известны и прошли испытания отечественные комплектации корректируемых ИНС [1], обязательным свойством которых является необходимость использования информации спутниковых навигационных средств (СНС).
Известна также морская единая система инерциальной навигации и стабилизации (СИНС «Ладога - М») [2], принятая в качестве прототипа. Система предназначена для выработки полного спектра выходных параметров, необходимых как для решения навигационных задач, так и для информационного обеспечения корабельных комплексов противовоздушной обороны, противолодочного и управляемого ракетного оружия.
Разработка системы «Ладога - М» завершена в 1999 г., система прошла испытания в полном объеме.
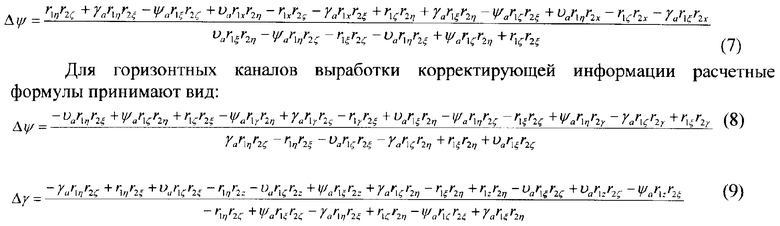
Система-прототип представлена блок-схемой на фиг.1.
СИНС «Ладога - М» вырабатывает и выдает следующую информацию:
- географические координаты места - широту и долготу;
- курс географический в плоскости горизонта;
- углы бортовой качки, измеренные в плоскости шпангоута, и углы килевой качки, измеренные в вертикальной плоскости;
- угловые скорости бортовой и килевой качки и изменения курса;
- две составляющие линейной скорости движения корабля относительно грунта в географической системе координат;
- три составляющие мгновенной скорости движения корабля в географической системе координат, вызванные качкой и орбитальным движением корабля в месте установки гироприбора;
- три составляющие линейного перемещения корабля в географической системе координат, вызванного качкой и орбитальным движением корабля в месте установки гироприбора;
- суммарный угол наклона палубы.
В системе реализован классический алгоритм ИНС полуаналитического типа с коррекцией.
В состав системы входят: ГП - гироприбор (1), ТС - прибор термостабилизации (2), УМТ - усилитель мощности термостабилизации (3), ПЦ - прибор цифровой (4), ПУ - прибор управления (5), Б-41 - ЭВМ «Багет - 41» (6).
Система функционирует следующим образом. Из ГП в ПЦ через аналого-цифровые преобразователи поступают три составляющие ускорения (Wx, Wy, Wz), углы качки и азимутальный угол (θk, ψ, A), а из ПЦ в ГП подаются управляющие сигналы
(Ωx, Ωy, Ωz).
Коррекция СИНС осуществляется путем выработки корректирующей информации навигационных данных (ΔНД) алгоритмами ЭВМ Б-41 (6) по данным ПЦ (4) НД и приемной аппаратуры спутниковой навигационной системы (СНС), вырабатывающей информацию о координатах и скорости Vc.
В систему поступает следующая внешняя информация:
- скорость от лага Vл,
- грубый курс от гирокомпаса Ко,
- координаты φc, λc, скорость Vс и путевой угол от приемника СНС.
Система имеет два рабочих режима:
- корректируемый режим (КР),
- автономный режим (АР).
В каждом запуске системы производится ее калибровка, которая продолжается от 6 до 8 часов (в зависимости от условий эксплуатации). Калибровка требует поступления внешних позиционных и скоростных данных. Для КР используется информация от приемника СНС и лага, а в АР - только от лага.
Несмотря на высокие характеристики функционирования системы, показанные в процессе испытаний, нельзя не отметить и ее существенные недостатки, касающиеся взаимодействия СИНС «Ладога - М» и средств коррекции.
Будучи неавтономной радиотехнической навигационной системой СНС показала себя зависимой от множества внешних факторов, влияющих на эффективность функционирования ее составных частей. К этим факторам относятся: количественный состав и состояние орбитальной группировки космических аппаратов (ОГ КА), функционирование наземного комплекса управления (НКУ), работа бортовой аппаратуры потребителей (АП). Кроме того, влиянию подвергаются каналы передачи информации СНС. Все перечисленные и другие возмущающие воздействия приводят к ухудшению характеристик функционирования системы коррекции и трудностям реализации корректируемого режима работы СИНС.
В нормальном состоянии СНС содержит ОГ из 21-24 КА, равномерно распределенных в околоземном пространстве. Согласно требованиям Международной Морской Организации действующая система должна обладать определенными свойствами. Основными эксплуатационными свойствами СНС являются доступность и целостность. Согласно требованиям глобальная СНС в штатном режиме функционирования должна обеспечивать доступность >99,8% в течение 30 суток, а целостность системы должна быть <10 с. В современных реальных условиях функционирования СНС ГЛОНАСС система коррекции не обеспечивает нормальную работу СИНС «Ладога - М» в корректируемом режиме и побуждает к совершенствованию аппаратуры и структуры взаимодействия навигационных средств.
Среди задач, решаемых СИНС, имеется задача информационного обеспечения корабельных комплексов противолодочного и управляемого ракетного оружия. Использование оружия не ограничивается определенными регионами и может применяться в любом месте и в любое время. По данным СИНС о координатах и курсе корабля осуществляется целеуказание и пуск ракет. Необходимым условием выполнения поставленной задачи являются максимальная точность и скрытность проведения операции. Штатный режим использования СИНС для информационного обеспечения ракетного оружия сопровождается необходимостью длительного сеанса обсервации по сигналам СНС и опасностью быть обнаруженным средствами наблюдения противника. Сокращение длительности сеанса обсервации приводит к снижению точности выработки данных курсоуказания.
Техническое решение задачи минимизации интервала времени подготовки пуска ракет и повышения точности целеуказания состоит в реализации представленного ниже способа определения поправки курса по данным о координатах только двух спутников СНС и текущих приборных значений параметров ориентации объекта, вырабатываемых ИНС. Реализация способа обеспечивает как разовое, так и непрерывное определение с высокой точностью поправки курса в реальном времени в любом районе плавания, включая высокоширотные районы Земли.
В настоящее время для определения курса и углов качки объекта по сигналам среднеорбитных навигационных спутников используют в основном фазовый метод. Этот метод базируется на применении разнесенных приемных антенн, фиксированных относительно корпуса подвижного объекта, с последующим измерением и преобразованием разностей фаз принимаемых сигналов.
Однако реализация фазового метода на морских объектах сопряжена с определенными трудностями. В работе [3] отмечается, что при определении ориентации объекта по данным фазовых измерений используют интерферометры с базой, достигающей нескольких метров. В то же время реальные фазоизмерительные устройства имеют диапазон однозначных измерений в пределах одной длины волны. Это порождает проблему неоднозначности решений при измерении разности фаз сигналов, принимаемых на разнесенные антенны. Кроме того, за счет неидентичности высокочастотных каналов аппаратуры возникают систематические погрешности измерений, которые необходимо учитывать при решении навигационной задачи.
Попытки практической реализации фазового метода на морских подвижных объектах не дают оснований для излишнего оптимизма. Реализуемая точность определения параметров ориентации объекта часто не удовлетворяет заданным требованиям [4]. Причинами снижения точности работы аппаратуры, кроме того, являются погрешности юстировки протяженных антенных систем на корабле, нежесткость элементов конструкции объекта, многолучевость распространения сигналов.
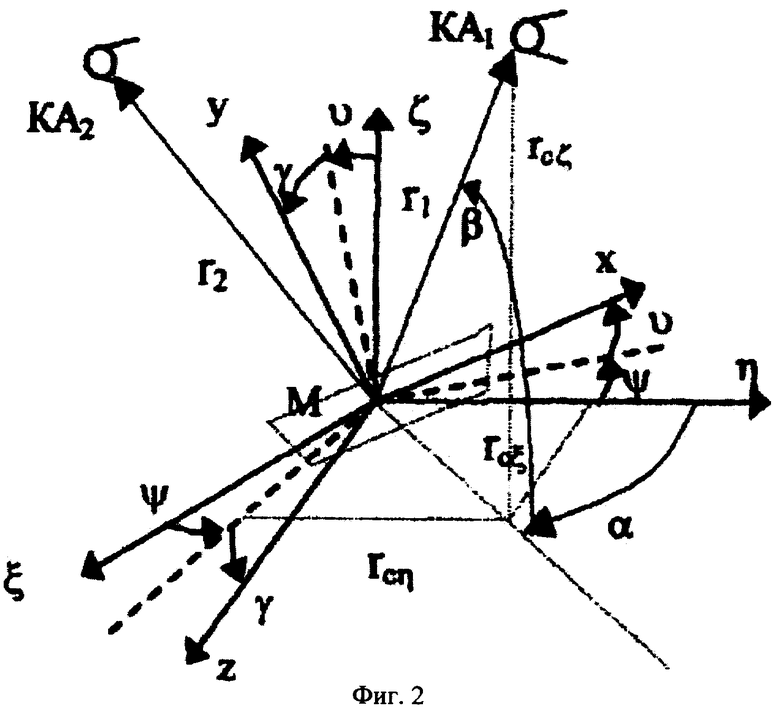
Для решения задач определения параметров ориентации объекта нами предлагается использовать данные о координатах навигационных спутников, используемых для обсервации (фиг.2).
Использование данных о координатах спутников СНС для определения ориентации объекта возможно, если известна связь углов ψ, υ, γ с данными, полученными в процессе обсервации. Такая связь выявляется при рассмотрении выражений для проекций векторов визирования КА на оси трехгранников Мξηζ и Mxyz (фиг.2). В рассматриваемом случае эти выражения соответствуют матричной зависимости

где rcxrcyrcz - координаты КА в системе Mxyz;
rcηrcζrcξ - координаты КА в системе Mξηζ;

- преобразующая матрица, соответствующая рассматриваемой геометрии [5].
По данным гироприборов вырабатываются текущие значения углов ориентации корабля, которые содержат погрешности.
Приборные значения углов крена, дифферента и рыскания можно представить выражениями

где ψa, υa, γa, - приборные значения углов;
ψ, υ, γ - истинные значения углов;
Δψ, Δυ, Δγ - погрешности выработки углов.
Поскольку углы ψ, υ, γ и ψа, υа, γа отображают ориентацию истинного и приборного положения трехгранника Mxyz в горизонтной системе осей, их взаимное положение можно описать матрицей направляющих косинусов для случая малого рассогласования координатных систем

где I - единичная матрица;
 - кососимметрическая матрица погрешностей выработки углов ориентации автономными средствами.
- кососимметрическая матрица погрешностей выработки углов ориентации автономными средствами.
С учетом формулы (3) выражение (1) принимает вид

где BA - матрица направляющих косинусов В, содержащая приборные значения углов ориентации.
Таким образом, получена векторно-матричная зависимость (4), однозначно отражающая связь текущих приборных значений углов ψа, υа, γа, и информации корабельной аппаратуры СНС (rcηrcζrcξ,rcxrcyrcz) с значениями погрешностей автономных измерений углов (Δψ, Δυ, Δγ), подлежащих коррекции.
Выражение (4) с учетом матрицы CBA достаточно сложно. Однако при решении практических задач можно допустить, что углы ψ, υ, γ изменяются в пределах (0°÷±6°), когда можно представить cosx≈1, sinx≈х, x2≈0. Тогда матрица CBA принимает вид

С учетом формулы (5) математическое описание связи спутниковой и автономной информации отображает значительный диапазон реальных условий работы аппаратуры на морском объекте и может быть использовано для построения алгоритма вычисления и коррекции погрешностей приборов автономного определения параметров ориентации.
Учитывая необходимость определения ориентации объекта в пространстве по сигналам не менее двух КА, можно записать (4) в векторно-матричной форме в виде системы линейных уравнений для неизвестных значений погрешностей автономных средств определения углов
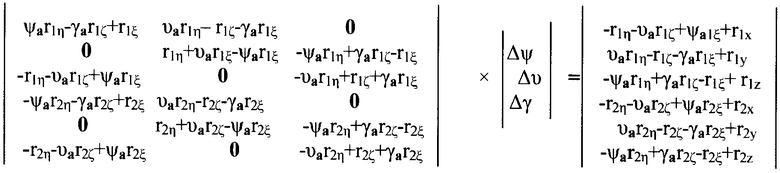
Дальнейшие преобразования позволяют получить расчетные формулы для неизвестных (Δψ, Δυ, Δγ).
Преобразования уравнений (6) состоят в выполнении следующих действий.
1. Выбор соответствующих пар уравнений системы (6) для первого и второго КА относительно переменных (Δψ, Δυ), (Δψ, Δγ), (Δυ, Δγ).
2. Решение каждой пары полученных уравнений для неизвестных Δψ, Δυ, Δγ. Для азимутального канала выработки поправки получаем
Анализ расчетных формул поправок к параметрам ориентации позволяет определить объем необходимой для расчета информации. Эта информация включает полный набор текущих приборных значений углов крена (γа), дифферента (υa), рысканья (ψа) объекта и полный набор текущих значений координат двух навигационных КА в топоцентрической (rcηrcζrcξ) и связанной с объектом (rcxrcyrcz) системах координат (с=1,2).
Формирование основных элементов (rcηrcζrcξ) расчетных формул выработки поправок осуществляется алгоритмами приемной аппаратуры СНС. Высокая точность и надежность определения координат КА в штатном режиме функционирования СНС гарантируется высокими эксплуатационными характеристиками глобальной навигационной системы.
Процедура вычисления координат навигационных КА в системе, связанной с объектом, (rcxrcyrcz) может осуществляться по приборным значениям углов ψa, υa, γa. Эти значения можно использовать как элементы матрицы В для вычисления координат навигационных спутников. Работоспособность алгоритма подтверждена результатами математического моделирования.
Для оценки возможностей рассматриваемого метода проведено математическое моделирование процесса коррекции курса. При этом использована математическая модель СНС ГЛОНАСС в штатном составе орбитальной группировки.
На поверхности Земли в плоскости меридиана определены 8 контрольных точек, в которых решается задача определения поправки курсоуказания. В контрольных точках приемная аппаратура принимает сигналы СНС, вырабатывает данные о координатах видимых навигационных спутников и осуществляет выбор спутников. После выбора пары спутников, пригодных для определения ориентации, и приема автономной измерительной информации вычисляются текущие значения поправки курсоуказания.
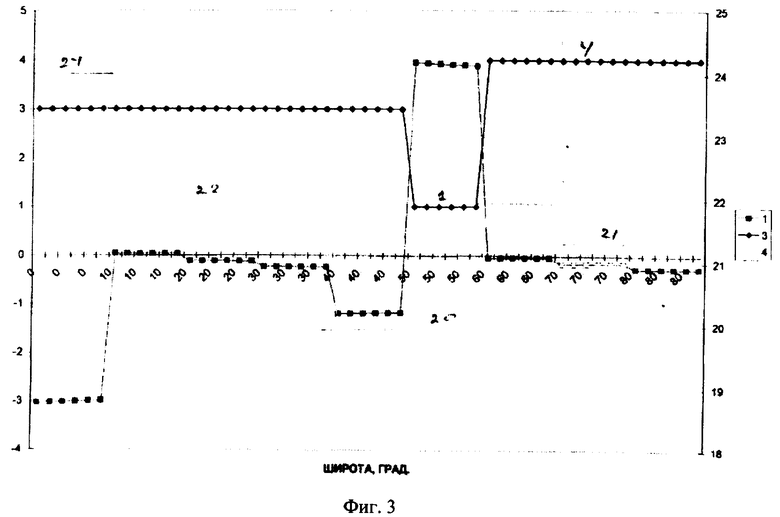
Результаты моделирования приведены в таблице и представлены в виде графиков на фиг.3.
Таблица содержит численные значения погрешности определения курса (ψ=34.377 угл. мин) в диапазоне широт (0°-80°) на интервале времени (t=4800-4850 с). Процесс коррекции осуществляется по сигналам двух навигационных спутников, номера которых приведены в таблице. Результаты коррекции представлены численными значениями поправки определения курса (Δψ угл. мин) с шагом 10 с.
Результаты моделирования процесса выработки поправки Δψ.
На фиг.3 представлены графики погрешности выработки поправок курса Δψ в зависимости от широты места объекта и номера используемых навигационных спутников (1; 3; 4). Характер изменения графиков погрешностей свидетельствует о высокой точности выработки поправок курса по данным СНС. На всем диапазоне изменения широты объекта (φ=0…80°) погрешность Δψ не превышает -3…+4 угл. мин. Полностью отсутствует зависимость точности от широты места объекта. В то же время очевидна связь погрешности и взаимного расположения навигационных спутников и объекта. Решение задачи осуществляется в реальном масштабе времени.
По результатам проведенных исследований можно сделать вывод о высокой эффективности рассмотренного способа коррекции параметров ориентации объекта.
Сущность способа определения поправки курса по данным о координатах спутников состоит в следующем:
- выбирают доступное для обсервации созвездие навигационных спутников;
- формируют пары из числа доступных спутников;
- выбирают пару спутников с наименьшим значением геометрического фактора;
- принимают данные гироприборов о текущих значениях параметров ориентации объекта;
- принимают сигналы измерений и эфемеридной информации спутниковой системы;
- вычисляют координаты спутников в топоцентрической и связанной с объектом системах координат;
- вычисляют поправки к текущим значениям параметров ориентации объекта по данным о текущих значениях параметров ориентации, координатам спутников в топоцентрической и связанной с объектом системах координат.
Техническое решение задачи осуществляется в процессе взаимодействия элементов структуры корректируемой системы навигации, ориентации и стабилизации.
Сущность изобретения поясняется чертежом фиг.4, на котором представлена корректируемая система инерциальной навигации и стабилизации, содержащая гиростабилизированную платформу (1) в трехосном кардановом подвесе с датчиками углов, на которой установлены три двухстепенных интегрирующих гироскопа и три линейных акселерометра; прибор цифровой (4), реализующий алгоритмы функционирования инерциальной системы, а также штатный (6) и резервный (7) блоки коррекции и переключатель коррекции (8). При этом выходы датчиков углов поворота колец карданова подвеса и выходы акселерометров соединены с входами прибора цифрового, один из выходов которого соединен с входом гиростабилизированной платформы, а другой соединен с блоками коррекции, выходы которых соединяются с переключателем коррекции (8). Управление системой осуществляется с пульта (ПУ), обеспечивающего формирование сигналов управления системой по команде К, поступающей от аппаратуры потребителей СНС. По команде К включаются штатный (Б-41), а по команде Кр - блок ускоренной коррекции (БУК).
Структура сохраняет основные функциональные элементы и связи системы-прототипа и представляет новый элемент - блок ускоренной коррекции (БУК) и новые связи БУК с прибором цифровым (ПЦ) и аппаратурой потребителя СНС, обеспечивающей выработку координат используемых спутников.
Взаимодействие блока ускоренной коррекции с элементами ИНС осуществляется в корректируемом режиме работы. Корректируемый режим включается по сигналам АП СНС К или Кр, означающим поступление корректирующей информации. По сигналу К включается штатный КР. Аппаратура потребителя вырабатывает информацию о текущих значениях координат места объекта, на входы штатного блока коррекции (Б-41) поступают навигационные данные (НД) и спутниковая информация φс, λс. Алгоритмы Б-41 вырабатывают текущие значения поправок погрешностей СИНС(ΔНД), которые поступают на вход блока ПЦ в положении I контактов переключателя ПК.
По сигналу Кр реализуется резервный КР. Аппаратура потребителя вырабатывает информацию о текущих значениях координат используемых спутников, на входы блока ускоренной коррекции (БУК) поступают навигационные данные (НД) и информация о координатах спутников. Алгоритмы БУК вырабатывают текущие значения поправок погрешностей ИНС, которые поступают на вход блока ПЦ в положении II контактов переключателя ПК.
Предлагаемая структура взаимодействия навигационных средств в комплексе аппаратуры обеспечивает глобальность, повышенную скрытность и высокую точность функционирования.
Использованная литература
1. Морская навигационная техника. Справочник под редакцией Смирнова Е.Р. - СПб.: «Элмор», 2002.
2 В.Г.Пешехонов и др. Единая система инерциальной навигации и стабилизации «Ладога-М». Морская радиоэлектроника №1(4), 2003, с.26-30.
3. Технические предложения по разработке навигационной аппаратуры. / Красноярск: НИИ Радиотехники КГТУ, 1996.
4. Андреев А.А., Кокорин В.И. и др. Результаты высокоширотных испытаний современных российских морских компасов. Труды международной конференции по интегрированным навигационным системам. - СПб.: ЦНИИ «Электроприбор», 2004, с.137-139.
5. Ривкин С.С. Статистический синтез гироскопических устройств. - Л.: Судостроение, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ ГИРОСКОПИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ МОРСКИХ ОБЪЕКТОВ | 2008 |
|
RU2428659C2 |
| КОРРЕКТИРУЕМАЯ СИСТЕМА ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И СТАБИЛИЗАЦИИ | 2006 |
|
RU2319930C2 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2448326C2 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2506542C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
Изобретение относится к области корректируемых по навигационным спутникам инерциальных систем навигации и гиростабилизации для морских объектов и может быть использовано на кораблях и судах в широком диапазоне условий плавания. Техническим результатом изобретения является определение поправки курса по данным о координатах только двух спутников спутниковой навигационной системы и текущих приборных параметров ориентации объекта, вырабатываемых инерциальной навигационной системы. Инерциально-спутниковая система навигации, ориентации и стабилизации содержит гиростабилизированную платформу в трехосном кардановом подвесе с датчиками углов, на которой установлены три двухстепенных интегрирующих гироскопа и три акселерометра, прибор цифровой, блок коррекции, причем выходы датчиков углов поворота колец карданова подвеса и выходы акселерометров гиростабилизированной платформы соединены с входами прибора цифрового, один из выходов которого соединен с входом гиростабилизированной платформы, а другой соединен с блоком коррекции, при этом инерциально-спутниковая система навигации снабжена пультом управления для формирования сигналов управления системой, также система снабжена блоком ускоренной коррекции, на вход которого поступают вырабатываемые спутниковой приемной аппаратурой текущие значения координат используемых навигационных спутников и текущие приборные значения параметров ориентации гиростабилизированной платформы, переключателем каналов штатной и ускоренной коррекции, причем выходы блоков коррекции соединены с входами переключателя, выход которого соединен с входом прибора цифрового. 1 табл., 4 ил.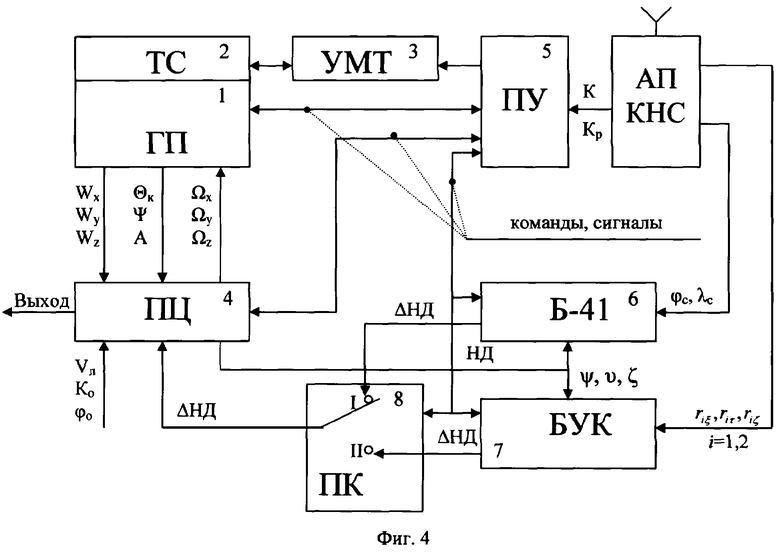
Инерциально-спутниковая система навигации, ориентации и стабилизации, содержащая гиростабилизированную платформу в трехосном кардановом подвесе с датчиками углов, на которой установлены три двухстепенных интегрирующих гироскопа и три акселерометра, прибор цифровой, реализующий алгоритмы функционирования инерциальной системы, блок коррекции, обеспечивающий функционирование системы в штатном корректирующем режиме, причем выходы датчиков углов поворота колец карданова подвеса и выходы акселерометров гиростабилизированной платформы соединены с входами прибора цифрового, один из выходов которого соединен с входом гиростабилизированной платформы, а другой соединен с блоком коррекции, при этом инерциально-спутниковая система навигации снабжена пультом управления для формирования сигналов управления системой, отличающаяся тем, что система снабжена блоком ускоренной коррекции, на вход которого поступают вырабатываемые спутниковой приемной аппаратурой текущие значения координат используемых навигационных спутников и текущие приборные значения параметров ориентации гиростабилизированной платформы, переключателем каналов штатной и ускоренной коррекции, причем выходы блоков коррекции соединены с входами переключателя, выход которого соединен с входом прибора цифрового.
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| FR 2891048 A1, 23.03.2007. | |||

