Изобретение относится к способу распознавания манипуляций над устройством, состоящим из импульсного датчика и регистрирующего устройства.
В частности, в области регистрации эксплуатационных данных грузового транспортного средства с помощью тахографа необходимо обеспечить исключение возможности манипуляций ввиду того, что такие зарегистрированные данные могут служить документальным доказательством. Наряду с релевантностью таких регистрируемых данных в качестве доказательства при юридических конфликтах важными также являются надежность эксплуатации транспортного средства и аспекты норм трудового права. Для нового поколения тахографов в цифровом исполнении, согласно Постановлению ЕС EU-VO 3821/85, к разработкам этих приборов предъявляется требование надежным образом препятствовать манипуляциям с этой новой техникой. Очевидным методом манипулирования регистрируемыми данными с противоправными целями является возможность модифицирования, например, электромагнитными средствами, сигнала датчика, который чаще всего размещается в зоне приводного механизма транспортного средства. Так, регулярные импульсные сигналы датчиков, если они передаются в реальном времени, могут подвергаться задержке и тем самым постоянно приводить к регистрации более медленной, чем действительная, скорости движения.
Поэтому задачей изобретения является затруднить манипуляции при передаче от импульсного датчика к регистрирующему устройству сигналов, коррелированных с пройденным путем или скоростью.
Для решения этой задачи в изобретении предлагается способ согласно пункту 1 формулы изобретения. Зависимые пункты формулы изобретения содержат предпочтительные варианты осуществления соответствующего изобретению способа.
Соответствующий изобретению способ находит особенно предпочтительное применение при ориентированной на пользователя регистрации данных, касающихся эксплуатации грузового транспортного средства, если регистрирующее устройство выполнено в виде тахографа, и импульсный датчик передает на регистрирующее устройство или, соответственно, тахограф сигнал, однозначно коррелированный с путем, пройденным транспортным средством, так как в рамках этого применения должны использоваться особенно жесткие критерии защиты от манипулирования. При этом импульсный датчик предпочтительным образом выполнен в виде датчика Холла и взаимодействует с вращающейся деталью приводного механизма, которая имеет попеременные выступы и свободные промежутки и за счет этого изменяет проницаемость в окрестности датчика Холла измеримым образом, формируя предпочтительно приближенно прямоугольный сигнал. В соответствии с этим датчик передает в регистрирующее устройство импульс реального времени, длительность периода которого однозначно коррелируется с частотой вращения соответствующей детали приводного механизма и со скоростью транспортного средства или пройденным путем. Высокая надежность защиты от манипулирования достигается в соответствующем изобретению способе за счет того, что результаты измерения датчика в регистрирующее устройство передаются как импульсы реального времени, а также как сигналы данных. Для этого датчик содержит соответствующий блок оценки, который импульсы реального времени преобразует в сигналы данных с высоким информационным содержанием, которые затем передаются в регистрирующее устройство параллельно с импульсами реального времени. Подобная передача в соответствии с изобретением инициируется регистрирующим устройством, в частности модулем оценки данных регистрирующего устройства, посредством первой запросной команды, на которую датчик отвечает сигналом данных. На основе циклической передачи первой запросной команды в датчик, модуль оценки сигналов данных регистрирующего устройства может дополнить без промежутков измерение датчика посредством сигналов данных. Передаваемые параллельно с сигналом данных от датчика на регистрирующее устройство импульсы реального времени принимаются регистрирующим устройством посредством интерфейса сигналов реального времени и суммируются последним для получения числа импульсов реального времени. Модуль оценки сигналов данных запрашивает посредством второй запросной команды от интерфейса сигналов реального времени с циклическими интервалами число импульсов реального времени и сравнивает отличие числа импульсов реального времени для текущего запроса относительно соответствующего числа из предыдущего запроса с числом импульсов, которые определены путем оценки сигнала данных из циклически передаваемых сигналов данных для того же интервала времени.
Для того чтобы модуль оценки сигналов данных всегда сравнивал числа импульсов реального времени, относящиеся к корректному временному интервалу измерения, с соответствующими числами импульсов сигнала данных и при этом не происходило ошибочное соотнесение сравниваемых величин, первая запросная команда и вторая запросная команда передаются со сдвигом относительно друг друга на определенный временной интервал Δt. Этот временной интервал Δt согласован с циклом первой запросной команды и разностью во времени передачи сигналов между сигналом реального времени или импульсами реального времени и сигналом данных.
Способ, соответствующий изобретению, имеет особые преимущества, если циклическая передача сигнала данных датчиком в регистрирующее устройство происходит с регулярными интервалами времени, в частности с минутными интервалами. Приблизительно минутные интервалы оказались особенно предпочтительными, потому что, особенно при применении соответствующего изобретению способа для регистрирующей функции тахографа, при модульном выполнении программного обеспечения с несколькими уровнями, посредством которого реализуется заявленный способ, модули программного обеспечения между интерфейсами и оценкой, касающейся обработки и передачи сигналов реального времени и сигналов данных, могут в течение этого времени надежным образом завершить соответствующий цикл.
Большие преимущества при реализации и изменениях обеспечиваются многоуровневой структурой соответствующего изобретению способа и соответствующей реализацией таким образом, что оценка сигнала данных реализуется на одном уровне, который доставляет исходные данные, принимает их и обрабатывает; второй уровень, осуществляющий информационный обмен с первым уровнем, обеспечивает перенос данных таким образом, что данные удобным способом преобразуются в соответствующие протоколы передачи данных или дополнительно подвергаются шифрованию. Третий уровень, осуществляющий информационный обмен со вторым уровнем, включающий в себя, например, последовательный интерфейс данных и интерфейс сигналов реального времени, обращается предпочтительным образом к регистру процессора и генерирует для обработки потоков данных прерывания процессора. Составной частью второго уровня целесообразно является модуль преобразования, который трансформирует сигналы данных из модуля оценки сигналов данных в форму, согласованную с протоколом передачи данных, и соответственно этому согласованные с протоколом принятые сигналы данных от датчика для регистрирующего устройства трансформирует обратно для внутренней последующей обработки в регистрирующем устройстве.
Для предотвращения какой-либо манипуляции целесообразно, если регистрирующее устройство посылает сигналы данных в датчик, и датчик посылает сигналы данных в регистрирующее устройство в зашифрованном виде, и компонентом регистрирующего устройства является модуль преобразования, который сигналы данных от регистрирующего устройства к датчику и от датчика к регистрирующему устройству зашифровывает или дешифрирует. По существу, независимо от этого, импульсы реального времени могут передаваться целесообразно без шифрования и без согласования с протоколом передачи данных в модуль оценки сигналов реального времени.
Предпочтительным образом модуль оценки сигналов реального времени, который переводит переданные от интерфейса сигналов реального времени импульсы реального времени, в частности, в информацию о скорости, при применении заявленного способа для тахографа посредством соединения передачи сигналов соединен с модулем оценки сигналов данных, на который пересылаются результаты этой оценки в качестве второго сигала данных. Подобная пересылка или передача между модулем оценки сигналов реального времени и модулем оценки сигналов данных осуществляется предпочтительно асинхронно посредством размещенного между обоими модулями коммуникационного запоминающего устройства.
На практике интервал времени между первой запросной командой и второй запросной командой предпочтительно выбрать в диапазоне от 50 мс до 300 мс. Наилучшая стабильность соответствующего изобретению способа и минимальная вероятность ошибок могут быть обеспечены при выборе интервала времени в пределах от 147 мс до 172 мс, так что оценка сигнала данных всегда соотносит число импульсов реального времени с корректным числом импульсов сигнала данных и позволяет получить корректный результат сравнения.
Далее изобретение поясняется на конкретном примере выполнения со ссылками на чертеже, где показано схематичное представление соответствующего изобретению способа.
На чертеже показано устройство, состоящее из тахографа DTCO и датчика S. Тахограф DTCO связан с датчиком S посредством линии RTL передачи сигналов реального времени и линии DL передачи данных. Существенными компонентами тахографа DTCO являются последовательный интерфейс DSI сигналов данных, модуль TM преобразования, модуль DSE оценки сигналов данных, коммуникационное запоминающее устройство KM, модуль RTSE оценки сигналов реального времени и интерфейс RTI сигналов реального времени. Тем самым тахограф DTCO берет на себя функцию соответствующего изобретению регистрирующего устройства RM.
В начале процесса передачи сигналов тахограф DTCO, инициированный модулем DSE оценки сигналов данных, посылает на датчик S данные 70 аутентификации и вслед за этим запрос 80 ответа. После успешной аутентификации обеих сторон и обмена ключом сеанса связи тахограф DTCO и датчик S вступают в пересылку данных, относящихся к эксплуатации грузового транспортного средства, согласно нормативному документу ISO 16844-3. В каждую минуту модуль DSE оценки сигналов данных посредством первой запросной команды 1.0 инициирует передачу результатов измерений датчика на промежуточном интервале времени в качестве сигнала DS данных в модуль DSE оценки сигналов данных. При этом соответствующий изобретению способ работает согласно многоуровневой конфигурации таким образом, что модуль DSE оценки сигналов данных передает или принимает первый запрос 1.0 и сигнал DS данных в форме исходных (необработанных) данных, так как модуль RTSE оценки сигналов реального времени, коммуникационное запоминающее устройство KM и модуль DSE оценки сигналов данных относятся к первому уровню 1.L.
Первая запросная команда 1.0 поступает в виде исходных данных от модуля DSE оценки сигналов данных в модуль ТМ преобразования, который относится ко второму уровню 2.L. В качестве элемента второго уровня 2.L, модуль ТМ преобразования трансформирует первую запросную команду 1.0 в форму, соответствующую протоколу DSP передачи данных.
Согласованные с протоколом сигналы данных, кроме того, зашифровываются модулем ТМ преобразования и передаются к элементу третьего уровня 3.L структуры, реализующей заявленный способ, а именно на интерфейс DSI сигналов данных. Третий уровень 3.L обращается на самом низком уровне к регистрам процессора и генерирует прерывания, в частности для обмена данными с датчиком S. Первая запросная команда поступает, таким образом, через интерфейс DSI сигналов данных по линии DL передачи данных к датчику S. Соответственно обратный путь, по существу, с инверсными процессами проходит сигнал DS данных, исходящий из датчика и поступающий на модуль DSE оценки сигналов данных.
По существу, независимо от процессов, связанных с сигналом DS данных, которые на схематичном изображении находятся на обозначенной символом D стороне D граничной линии G, одновременно, по другую сторону от этой граничной линии G реализуются процессы, связанные с импульсами RTS реального времени, на обозначенной символами RT стороне RT. Посредством линии RTL передачи сигналов реального времени датчик S посылает импульсы RTS реального времени на интерфейс RTI сигналов реального времени.
Находящийся на третьем уровне 3.L интерфейс RTI сигналов реального времени посылает соответствующие сигналы RTS на модуль RTSE оценки сигналов реального времени, причем число сигналов RTS реального времени суммируется с накоплением с числом RTSN импульсов реального времени.
Со смещением на определенный интервал Δt относительно первой запросной команды 1.0, а именно на интервал в пределах от 147 мс до 172 мс, согласованно с протекающими на втором уровне 2.L и третьем уровне 3.L процессами передачи сигнала DS данных или первой запросной команды 1.0, модуль DSE оценки сигналов данных передает на интерфейс RTI сигналов реального времени вторую запросную команду 2.0 через промежуточное включение модуля ТМ преобразования. С соответствующим временным смещением относительно поступления сигнала DS данных с датчика S в модуль DSE оценки сигналов данных, интерфейс RTI сигналов реального времени передает число RTSN импульсов реального времени непосредственно в модуль DSE оценки сигналов данных.
Посредством коммуникационного запоминающего устройства KM модуль DSE оценки сигналов данных и модуль RTSE оценки сигналов реального времени осуществляют асинхронный обмен данными. Модуль DSE оценки сигналов данных сравнивает число RTSN импульсов реального времени с числом DSN импульсов сигнала данных и при определенном отклонении обоих значений, не превышающем допустимой величины, устанавливает в коммуникационном запоминающем устройстве KM флаг FF ошибки, который считывается модулем RTSE оценки сигналов реального времени. При этом флаг FF ошибки служит указателем манипуляции и подается в регистрирующее запоминающее устройство R. Одновременно модуль RTSE оценки сигналов реального времени вместо импульсов RTS реального времени получает информацию из сигнала DS данных для определения пути, пройденного грузовым транспортным средством.
При сравнении числа RTSN импульсов реального времени с числом DSN импульсов сигнала данных допустимо отклонение, определенное в качестве предельного значения, только при превышении которого устанавливается флаг FF ошибки.
В зависимости от импульсов RTS реального времени модуль RTSE оценки сигналов реального времени передает сигнал V движения или сигнал ST остановки на модуль DSE оценки сигналов данных.
Если от модуля RTSE оценки сигналов реального времени на модуль DSE оценки сигналов данных передан сигнал ST остановки, то модуль DSE оценки сигналов данных сообщает о состоянии покоя для транспортного средства.
Если модуль RTSE оценки сигналов реального времени не передает на модуль DSE оценки сигналов данных никакого сигнала для случая, когда модуль RTSE оценки сигналов реального времени распознает состояние остановки, и интерфейс RTI сигналов реального времени передает слишком низкое число RTSN импульсов реального времени RTSN=0 по сравнению с числом DSN импульсов сигнала данных, то устанавливается флаг FF ошибки, и регистрация осуществляется на основе пройденного пути, определенного из сигнала данных, при этом определяется состояние, соответствующее тому, что на соединение воздействуют помехи через линию передачи сигналов реального времени.
Если модуль RTSE оценки сигналов реального времени передает на модуль DSE оценки сигналов данных сигнал V для случая, когда модуль RTSE оценки сигналов реального времени распознает состояние движения и интерфейс RTI сигналов реального времени передает слишком низкое число RTSN импульсов реального времени по сравнению с числом DSN импульсов сигнала данных, то устанавливается флаг FF ошибки, и регистрация осуществляется на основе пройденного пути или скорости движения, определенных из сигнала DS данных.
Если сигнал DS данных полностью отсутствует в рамках циклических запросных команд 1.0, то также устанавливается флаг FF ошибки, и определяется состояние, соответствующее тому, что на соединение воздействуют помехи через линию DL передачи данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТАХОГРАФ, БОРТОВОЙ БЛОК ДЛЯ СБОРА ЗА ПОЛЬЗОВАНИЕ ДОРОГОЙ (MAUT-ON-BOARD-UNIT), ИНДИКАТОРНЫЙ ПРИБОР И СИСТЕМА | 2008 |
|
RU2506642C2 |
| УСТРОЙСТВО С ТАХОГРАФОМ | 2006 |
|
RU2413302C2 |
| СИСТЕМА И БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИНТЕГРАЦИИ ФУНКЦИЙ АВТОМОБИЛЬНЫХ УСТРОЙСТВ | 2009 |
|
RU2523181C2 |
| СИСТЕМА И БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИНТЕГРАЦИИ ФУНКЦИЙ АВТОМОБИЛЬНЫХ УСТРОЙСТВ | 2009 |
|
RU2559744C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2591647C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2567700C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТАХОГРАФА И ТАХОГРАФ | 2008 |
|
RU2475855C2 |
| СЕНСОРНОЕ УСТРОЙСТВО, УСТРОЙСТВО ТАХОГРАФА И СПОСОБ РАСПОЗНАНИЯ МАНИПУЛИРОВАНИЯ | 2009 |
|
RU2531561C2 |
| ТРЕК ТАХОГРАФ | 2011 |
|
RU2475704C1 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО - ЦИФРОВОЙ ТАХОГРАФ | 2014 |
|
RU2584476C2 |
Изобретение относится к способу распознавания манипуляций в устройстве, состоящем из импульсного датчика и регистрирующего устройства. В частности, для тахографов актуальным является устранение любой возможности манипуляций. Технический результат заключается в повышении надежности защиты от манипуляции. Согласно изобретению датчик (S) передает в регистрирующее устройство (RM) измеренные импульсы (RTS) реального времени и циклически, в ответ на первую запросную команду сигнал (DS) данных, и в ответ на вторую запросную команду, смещенную во времени относительно первой запросной команды, принимает число (RTSN) импульсов реального времени. Модуль (DSE) оценки сигналов данных сравнивает число (RTSN) импульсов реального времени и число (DSN) импульсов сигнала данных. 14 з.п. ф-лы, 1 ил.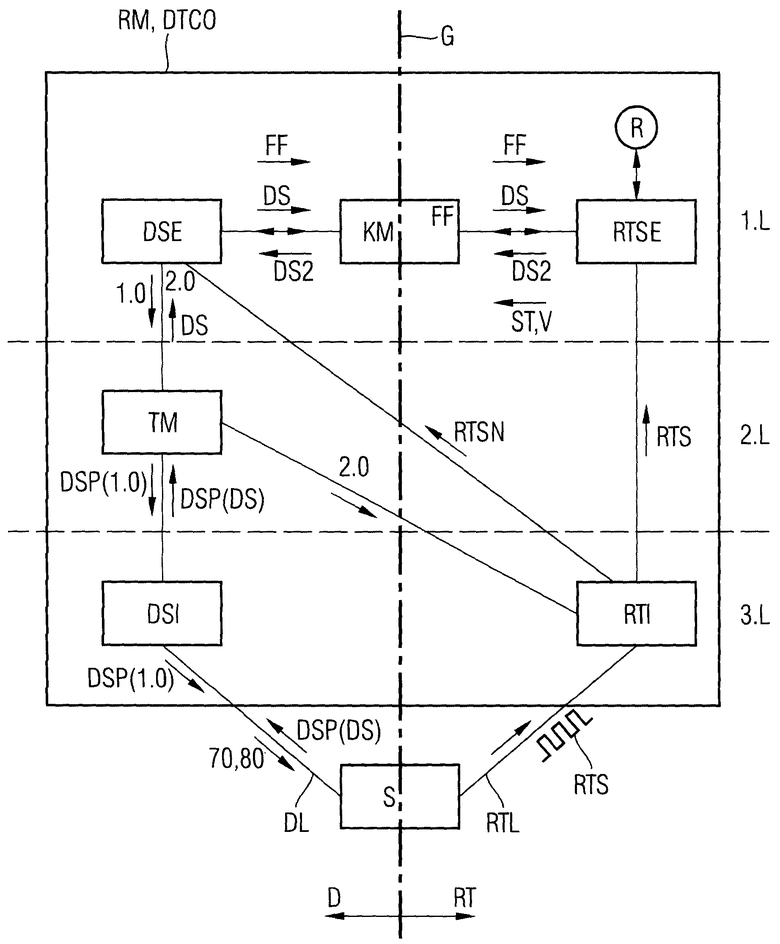
| US 6144927 А, 07.11.2000 | |||
| SU 1267257 A1, 30.10.1986 | |||
| DE 19514008 A1, 17.10.1996 | |||
| US 6109520 А, 29.08.2000 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

