Изобретение относится к системам обеспечения безопасности дорожного движения и предназначено для контроля параметров движения и мониторинга транспортного средства.
Известно устройство инерциально-спутниковый модуль и комплексная инерциально-спутниковая система навигации, связи, освещения обстановки, управления и контроля (RU 2036432 C1, МПК G01C 21/24, G01C 23/00, опубл. 27.05.1995) /1/. В данном устройстве контроль и безопасность достигаются за счет того, что в инерциально-спутниковом модуле определяются девять интегральных параметров по каждой из погрешностей по трем координатам и трем проекциям линейной скорости. За счет размещения на корпусе объекта ряда инерциально-спутниковых модулей появляется возможность определить линейные и угловые деформации объекта в блоках определения линейных деформаций и блоках определения угловых деформаций. Данное устройство за счет технически сложного решения обладает избыточной информацией, позволяющей решать сложные, прикладные и даже научные вопросы за счет использования большого объема измерительной аппаратуры, что значительно удорожает стоимость устройства. Оно громоздко и не может быть применено в компактных устройствах, таких как транспортное средство.
Известно устройство система регистрации и восстановления параметров движения транспортного средства (RU 2221277 С1 МПК 7 G07C 5/08, B60R 27/00, опубл. 10.01.2004) /2/. На транспортном средстве установлены измерители путевой скорости и продольной составляющей ускорения, подключенные к аналого-цифровому преобразователю. Кроме того, к аналого-цифровому преобразователю подключены измеритель угловых скоростей и измеритель поперечных составляющих ускорения. Выходы аналого-цифрового преобразователя подключены к регистру памяти и решающему устройству. Предусмотрены блок индикации критических параметров, блок формирования команд и последовательно соединенные блок преобразования формата данных, энергонезависимая память, блок считывания данных и блок беспроводной передачи данных. Данное устройство позволяет использовать цифровые регистраторы, а значит и цифровые методы обработки информации, связанные с расширением объемов записываемой, а значит и обрабатываемой информации. Устройство решает сугубо специализированные задачи в короткие моменты времени, которые наступают лишь во время наступления страхового случая дорожно-транспортного происшествия.
Известно устройство блок тахографа для транспортного средства и блок датчиков для тахографа (DE 102009042958 (A1) G07C 5/08, опубл. 04.08.2011) /3/. В данном устройстве предлагается улучшить работу датчика скорости путем введения в измерительную схему дополнительного датчика - акустического сенсора. Представленное расположение датчиков, включенных в сенсорную головку, обеспечивает близкое расположение к датчику скорости, который находится в сенсорной головке, дополнительного датчика, который представлен как акустический сенсор, например микрофон. Они располагаются как можно ближе друг к другу, чтобы оба имели одинаковые условия работы. Сенсорная головка, а значит и оба датчика, приближена к ведущей шестерне, которая расположена на коробке передач транспортного средства, которое имеет большое количество зубьев. Датчик скорости реагирует на выступающие части, которыми являются зубья ведущей шестерни, вызывающие изменения магнитного поля, что формирует сигнал в форме прямоугольного импульса. Этот импульс является мерой для подсчета числа оборотов передаточного механизма, и, таким образом, для определения скорости, и для определения пройденного расстояния. Устройство работает следующим образом. Микрофон улавливает звуки из коробки передач, которые выражаются в частотном спектре. Датчики соединены каждый со своим формирователем и работают согласовано, в тандеме. Как и в обычной схеме включения тахографа, присутствует система шифрования информации, приходящей с датчика скорости. Данное устройство не способствует упрощению работы тахографа, поскольку добавляется кабель связи с тахографом, обеспечивающий получение информации от дополнительного датчика. Монтаж сенсорной головки, в которой должны крепиться два датчика, усложняет работы по ее установке, что приводит к дополнительному удорожанию устройства в целом.
Наиболее близким по технической сущности к заявляемому изобретению является способ регистрации скорости для тахографической системы (US 2010191413 A1, G01P 21/02, G01P 3/50, G01P 3/66, опубл. 15.05.2010) /4/, принимаемый за прототип. Изобретение относится к способу определения и сохранения скорости, пройденного пути и информации, которую регистрирует тахограф.
Тахограф содержит микропроцессорное арифметическое устройство для обработки приходящей от датчиков информации, блока питания, индикатор для отображения оперативной информации, датчик скорости, установленный на коробке передач, приемник глобальной системы позиционирования (GPS приемник), кнопочную станцию для управления режимами работы, колесный датчик антиблокировочной системы для определения числа оборотов колеса, что позволяет определить скорость транспортного средства, печатающее устройство (принтер) и два устройства ввода/вывода карт с электронным чипом для хранения оперативной информации, накапливаемой по маршруту транспортного средства, и идентификации работающего водителя.
Для определения скорости микропроцессорное арифметическое устройство обрабатывает сигналы, по крайней мере, от двух независимых датчиков, сравнивает полученные данные друг с другом и хранит сообщение об ошибке, если сигналы существенно отличаются друг от друга. В предлагаемом варианте сигналы, по крайней мере трех независимых датчиков, сравниваются друг с другом в микропроцессорном арифметическом устройстве и проверяются на их совпадение, исключив любые сигналы, значения которых существенно отличаются от остальных сигналов. Определение скорости транспортного средства должно определяться только с использованием одного или нескольких сигналов, которые отличаются друг от друга лишь в определенных пределах.
Недостатками предлагаемого изобретения-прототипа являются:
1. Недостаточную точность определения основных параметров тахографа (скорости и пройденного пути) в связи с тем, что источник времени цифрового тахографа нестабилен. Так по нормам, изложенным в добавлении 1В к приложению Европейской комиссии по транспортным средствам (ЕСТР ECE/TRANS/SC.1/2006/2/Add.1) /5/, разброс времени цифрового тахографа может составлять до ±2 минуты в день, но в тех же документах есть ссылка и рекомендация на необходимую корректировку, в случае если выбег времени составляет до 20 минут в сутки.
2. Датчик скорости, поскольку он установлен на коробке передач и требуется кабель для его соединения с тахографом, становится объектом противоправных действий недобросовестных водителей, что позволяет тем или иным способом воздействовать на получаемые данные с целью их фальсификации. Для борьбы с возможными манипуляциями приходится дополнительно вводить криптографическую защиту тахографа, что, дополнительно, требует применения специальных, так называемых шифрованных датчиков скорости и установки дорогостоящего криптографического программного обеспечения. Помимо этого, установка шифрованного датчика скорости требует проведения калибровки тахографа, во время которого определяются коэффициенты K и L. Коэффициент K характеризует количество оборотов колеса на километр пробега, коэффициент L - длину обода колеса, что позволяет при движении транспортного средства путем перемножения данных коэффициентов получить пройденный путь, а имея время пробега получать скорость. Данные работы приводят к увеличению стоимости изделия в целом и к повышению трудоемкости, связанной с проведением регламентных работ по установке шифрованного датчика.
3. В тахографе используется только приемник сигналов радионавигационной системы глобального спутникового позиционирования GPS (Global Position System).
4. Отсутствует возможность оперативного контроля местоположения транспортного средства.
Задача, решаемая настоящим изобретением, состоит в увеличении точности работы, а соответственно, в повышении достоверности определяемых параметров и в расширении функциональных возможностей трек тахографа. Повышение точности работы обеспечивается за счет синхронизации со временем, используемой системой космической навигации ГЛОНАСС/GPS/GALILEO, поскольку в протоколе обмена данными содержится как навигационная информация о наземной скорости, широте, долготе, так и привязка ко времени UTC. В качестве эталона времени UTC спутниковой системы ГЛОНАСС используется стандарт частоты, суточная нестабильность которого составляет 5×10-13. (Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ ИКД ГЛОНАСС. Редакция 5.0 2002) /6/. С целью расширения функциональной возможности трек тахографа предлагается использовать модуль (модем) GSM/GPRS, который обеспечивает работу устройства в глобальной системе мобильной связи GSM (Global System for Mobile Communication) с использованием технологии пакетной передачи данных GPRS (General Packet Radio Service). Наличие этого устройства позволяет организовать мониторинг транспортного средства - оперативно информировать о местоположения транспортного средства диспетчерский центр.
Для обеспечения непрерывности поступления информации от разных, независимых друг от друга источников, дополнительно, в состав трек тахографа вводится акселерометр, информация с которого будет в режиме реального времени поступать в микропроцессор и в нем, преобразованная, будет сравниваться с информацией, получаемой от приемника спутниковой навигации и при необходимости дополнять ее.
Указанные технические результаты достигаются за счет того, что в трек тахограф, содержащий индикатор, кнопочную станцию, печатающее устройство, два слота карточек водителей, разъем входного напряжения питания, блок питания, микропроцессор, запоминающее устройство и колесный датчик антиблокировочной системы, приемник спутниковой навигации ГЛОНАСС/GPS/GALILEO, ГЛОНАСС/GPS/GALILEO антенну, разъем для подключения ГЛОНАСС/GPS/GALILEO антенны, блок стабилизатора напряжения 3,3 В, согласно изобретению вводится порт ввода-вывода стандартного интерфейса UART для обмена данными, введен GSM/GPRS модем, SIM карта, а также разъем и антенна GSM, в качестве дополнительного источника информации вводится акселерометр, который располагается на печатной плате в корпусе трек тахографа, что исключает любой вид манипуляции над ним. При этом выход разъема входного напряжения питания соединен со входом блока питания трек тахографа, к выходу питания которого подключены входы питания блока стабилизатора напряжения 3.3 В, вход питания индикатора, кнопочной станции, печатающего устройства, слота первого и слота второго карточек водителя, акселерометра и модема GSM/GPRS, запоминающего устройства, микропроцессора и колесного датчика антиблокировочной системы. Микропроцессор связан с акселерометром, а также соединен со входами индикатора, кнопочной станции, печатающего устройства, слота первого и слота второго карточек водителя, к порту ввода-вывода стандартного интерфейса UART, соединенного с модемом GSM /GPRS, а через него и через разъем GSM и с антенной GSM, со вторым портом ввода-вывода стандартного интерфейса UART, нагруженного на модуль приемника спутниковой навигации ГЛОНАСС/GPS/GALILEO, и колесным датчиком антиблокировочной системы. Выход питания блока стабилизатора напряжения 3.3 В, соединен со входом питания приемника спутниковой навигации ГЛОНАСС/GPS/GALILEO и через разъем подключения ГЛОНАСС/GPS/GALILEO антенны подает питание на антенну ГЛОНАСС/GPS/GALILEO.
На фиг.1 изображена функциональная схема трек тахографа.
Трек тахограф содержит блок питания 1, соединенный входом питания с выходом разъема подключения питания 2, а выходом к входу питания микропроцессора 8, который подключен к индикатору 3, акселерометру 4, кнопочной станции 5, печатающему устройству 6, слоту первому 7 и слоту второму 9 карточек водителя, запоминающему устройству 13 и к колесному датчику антиблокировочной системы 21. Микропроцессор 8 соединен с портом ввода-вывода стандартного интерфейса UART 10 GSM/GPRS модема 15, который через разъем GSM 17 соединен с антенной GSM 16, GSM/GPRS модем 15 подключен к SIM-карте 12, которая необходима для аутентификации трек тахографа в GSM сети. Микропроцессор 8 соединен с портом ввода-вывода стандартного интерфейса UART 11 приемника спутниковой навигации 14, который через разъем подключения ГЛОНАСС/GPS/GALILEO антенны 19 соединен с ГЛОНАСС/GPS/GALILEO антенной 20. Выход питания блока стабилизатора напряжения 1 нагружен на питающие входы устройств 3, 4, 5, 6, 7, 9, 13, 15, 18 и 21. Стабилизатор напряжения 18 подает напряжение питания через разъем ГЛОНАСС/GPS/GALILEO 19 на антенну ГЛОНАСС/GPS/GALILEO 20, которая выделяет и передает на приемник ГЛОНАСС/GPS/GALILEO 14 сигналы с видимых спутников группировки ГЛОНАСС/GPS/GALILEO. Приемник ГЛОНАСС/GPS/GALILEO 14, по стандартному протоколу NMEA, производит вычисление географических координат объекта и передает информацию о местоположении, скорости и времени, через порт ввода-вывода стандартного интерфейса UART 11 на микропроцессор 8, в котором происходит накопление информации и синхронизация со временем UTC. С акселерометра 4 на микропроцессор 8 приходит информация, в котором она преобразуется и в дальнейшем, в виде пройденного пути и скорости, в соответствии с нормами ЕСТР, накапливается раз в секунду. Информация от всех источников накапливается, анализируется в микропроцессоре 8. Через порт ввода-вывода стандартного интерфейса UART 10 обработанный в микропроцессоре 8 навигационный сигнал подается на модем GSM/GPRS 15, откуда, через разъем GSM 17, попадает на антенну GSM 16. Антенна GSM 16 передает сигналы в GSM сеть, при этом SIM-карта 12 определяет оператора GSM сети.
В моменты нарушения связи микропроцессор 8 осуществляет запись поступающей ему информации в запоминающее устройство 13 с пометкой времени, которая при восстановлении связи считывается из микропроцессора 8 в модем GSM/GPRS 15. Работа трек тахографа начинается с установки в слот первый 7 или слот второй 9 (в зависимости от того, какой водитель начинает вождение) карточки водителя и подтверждается сигналом с колесного датчика антиблокировочной системы 21 о начале движения, о чем информируется микропроцессор 8, и включается программное обеспечение активирующее алгоритм работы трек тахографа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИДЕО КОНТРОЛЬ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ | 2012 |
|
RU2587408C2 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО - ЦИФРОВОЙ ТАХОГРАФ | 2014 |
|
RU2584476C2 |
| Способ учета рабочего времени и система для его осуществления | 2021 |
|
RU2777267C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2591647C1 |
| Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов | 2020 |
|
RU2762080C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2567700C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2716964C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2019 |
|
RU2720224C1 |
Изобретение относится к области навигационного приборостроения и может быть использовано в системах обеспечения безопасности дорожного движения. Технический результат - расширение функциональных возможностей. Для этого микропроцессор 8 через порт ввода-вывода стандартного интерфейса UART 10 передает навигационную информацию о местоположении транспортного средства на GSM/GPRS модем 15, который с помощью SIM карты 12 производит аутентификацию трек тахографа в GSM сети и после этого передает полученную информацию в диспетчерский центр. Информация от приемника спутниковой навигации ГЛОНАСС/GPS/GALILEO 14 по стандартному протоколу NMEA поступает в микропроцессор 8, в котором преобразуется навигационная составляющая, содержащая информацию о наземной скорости, широте, долготе для передачи в диспетчерский центр. Одновременно производится синхронизация времени трек тахографа со временем UTC, используемой системой космической навигации ГЛОНАСС/GPS/GALILEO. В микропроцессор 8 также поступает информация от акселерометра 4, где она сравнивается с информацией, приходящей от приемника космической навигации ГЛОНАСС/GPS/GALILEO. 1 ил.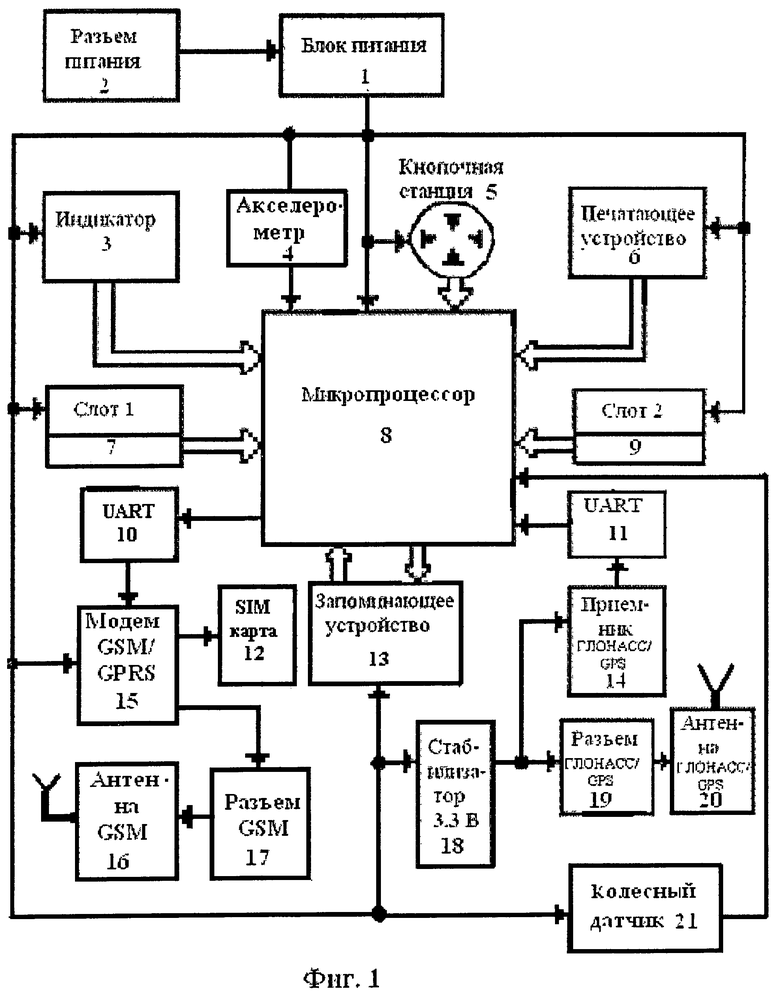
Трек тахограф, состоящий из микропроцессорного арифметического устройства, предназначенного для обработки приходящей от датчиков информации, запоминающего устройства для хранения информации, блока питания, индикатора для отображения оперативной информации, кнопочной станции для управления режимами работы, колесного датчика антиблокировочной системы, для определения начала движения транспортного средства, печатающего устройства (принтера) и двух устройств ввода/вывода карт с электронным чипом для хранения информации и идентификации водителя, приемник спутниковой навигации ГЛОНАСС/GPS/GALILEO, ГЛОНАСС/GPS/GALILEO антенна, разъем для подключения ГЛОНАСС/GPS/GALILEO антенны, блок стабилизатора напряжения 3,3 В, отличающийся тем, что в него введены порт ввода-вывода стандартного интерфейса UART для обмена данными, введен GSM/GPRS модем, SIM карта, а также разъем и антенна GSM, микропроцессор получает навигационную информацию и синхронизируется со временем UTC, содержащимся в протоколе обмена данными используемой системой космической навигации ГЛОНАСС/GPS/GALILEO, в качестве дополнительного источника информации вводится акселерометр, который располагается на печатной плате в корпусе трек тахографа, при этом выход разъема входного напряжения питания соединен со входом блока питания трек тахографа, к выходу питания которого подключены входы питания блока стабилизатора напряжения 3,3 В, входы блока питания индикатора, кнопочной станции, печатающего устройства, слота первого и слота второго карточек водителя, акселерометра и модема GSM/GPRS, запоминающего устройства и микропроцессора, который связан с акселерометром, а также соединен со входами индикатора, кнопочной станции, печатающего устройства, слота первого и слота второго карточек водителя, к порту ввода/вывода стандартного интерфейса UART, соединенного с модемом GSM/GPRS, а через него и через разъем GSM и с антенной GSM, со вторым портом ввода-вывода стандартного интерфейса UART нагруженного на модуль приемника спутниковой навигации ГЛОНАСС/GPS/GALILEO и колесным датчиком антиблокировочной системы, выход питания блока стабилизатора напряжения 3,3 В соединен со входом питания приемника спутниковой навигации ГЛОНАСС/GPS/GALILEO и через разъем подключения ГЛОНАСС/GPS/GALILEO антенны подает питание на антенну ГЛОНАСС/GPS/GALILEO.
| US 20100191413 A1, 29.07.2010 | |||
| DE 102009042958 A1, 04.08.2011 | |||
| СИСТЕМА РЕГИСТРАЦИИ И ВОССТАНОВЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2221277C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| Пилотажные комплексы и системы управления самолетов и вертолетов / БОРОДИН В.Т | |||
| и др | |||
| - М.: Машиностроение, 1978, с.87-89 | |||
| 0 |
|
SU82495A1 | |

