Изобретение относится к области исследования параметров морской воды и может быть использовано для измерения плотности морской воды при исследованиях морской среды с подвижного носителя гидрофизической аппаратуры.
Плотность морской воды является важнейшей характеристикой морской среды. Разработка методов и средств определения плотности морской воды остается актуальной проблемой современной океанологии [1], в том числе ее нового направления - оперативной океанографии [2]. В настоящее время не прекращается поиск новых методов определения плотности морской воды. Предлагаются, в частности, новые методы расчета плотности по измеренным in situ другим параметрам морской среды [3].
Известен способ измерения плотности и уровня жидкости, включающий размещение двух датчиков давления на фиксированном расстоянии друг над другом в резервуаре с исследуемой жидкостью, определение значения давления нижнего датчика, характеризующийся тем, что фиксируют значения смещения нуля нижнего и верхнего датчиков давлений, когда уровень жидкости находится ниже их уровней, фиксируют значения давлений нижнего и верхнего датчиков давления, когда уровень жидкости находится выше уровня верхнего датчика давления, а плотность и уровень жидкости определяют расчетным путем [4].
Известны также другие способы измерения плотности морской воды, см, например, изобретения по патентам [5], [6].
Недостатком известных способов [4], [5], [6], является невозможность измерения плотности морской воды при исследованиях морской среды с подвижного носителя гидрофизической аппаратуры.
Известен также способ измерения плотности морской воды с подвижного носителя гидрофизической аппаратуры, являющийся по технической сущности наиболее близким к предлагаемому изобретению, и принятый за прототип [7]. Способ включает измерение солености морской воды, температуры морской воды и давления. Температуру морской воды и давление измеряют с помощью обрывного зонда, который сбрасывают с подводного носителя. Измеряют удельную электрическую проводимость морской воды, температуру морской воды и давление соответственно преобразователем удельной электрической проводимости морской воды, преобразователем температуры и преобразователем давления, расположенными на подводном носителе. Перед сбрасыванием обрывного зонда производят калибровку средств измерений. Измерение солености морской воды производят на глубине, превышающей глубину галоклина при помощи средств измерения. При расчете значения плотности морской воды значение солености принимают равным значению солености, измеренному с помощью преобразователя удельной электрической проводимости, преобразователя температуры и преобразователя давления, расположенных на подводном носителе.
Способ-прототип позволяет измерять плотность морской воды с подвижного носителя гидрофизической аппаратуры.
Недостатком известного способа измерения плотности морской воды с подвижного носителя гидрофизической аппаратуры является необходимость измерения нескольких гидрофизических параметров морской среды, их калибровки и последующих вычислений с использованием таблиц и специальных полиномов.
Технической задачей, решаемой предлагаемым изобретением, является расширение арсенала технических средств измерения плотности морской воды за счет создания способа измерения плотности морской воды, основанного на измерении с подвижного носителя гидрофизической аппаратуры только одного параметра морской среды, а именно давления, с помощью системы датчиков давления, нечувствительной к наклону в поле силы тяжести, и без необходимости дополнительных измерений других гидрофизических параметров морской среды и последующих вычислений с использованием таблиц и специальных полиномов.
Сущность предлагаемого изобретения заключается в том, что измерение плотности морской воды при вертикальном зондировании морской среды производят путем измерения давления в четырех пространственно разнесенных точках с помощью системы, состоящей из четырех идентичных одинаково ориентированных датчиков давления обтекаемой формы, установленных на подвижном носителе гидрофизической аппаратуры, при этом три датчика давления расположены на одинаковом расстоянии один от другого и равноудалены от размещенного по ходу движения четвертого датчика давления, а плотность морской воды определяют по формуле:

где:
ρ - плотность морской воды, кг/м3,
 - расстояние от четвертого датчика давления до первого, второго и третьего датчиков давления, м;
- расстояние от четвертого датчика давления до первого, второго и третьего датчиков давления, м;
g - ускорение свободного падения, м/с2,
α - угол между пересекающимися прямыми линиями, проходящими через четвертый и первый датчики давления, через четвертый и второй датчики давления, через четвертый и третий датчики давления, град,
ΔP1=P1-P0,
ΔP2=P2-P0,
ΔР3=Р3-Р0,
Р1 - давление, измеренное первым датчиком давления, Па,
Р2 - давление, измеренное вторым датчиком давления, Па,
Р3 - давление, измеренное третьим датчиком давления, Па,
Р0 - давление, измеренное четвертым датчиком давления, Па.
При этом угол α находится в диапазоне от 45° до 90°.
Сущность предлагаемого изобретения поясняется дальнейшим описанием и чертежами, на которых приведены:
на фиг. 1, 2, 3 - чертежи, характеризующие геометрические параметры расположения датчиков давления относительно друг друга;
на фиг. 4 - пример пространственной ориентации системы датчиков давления при вертикальном зондировании исследуемой морской среды;
на фиг. 5 - пример пространственной ориентации системы датчиков давления при горизонтальном зондировании исследуемой морской среды;
на фиг. 6 - графики зависимости погрешности (в относительных единицах) определения плотности морской воды, обусловленной погрешностью измерения давлений, от взаимного расположения датчиков давления при вертикальном и горизонтальном зондировании.
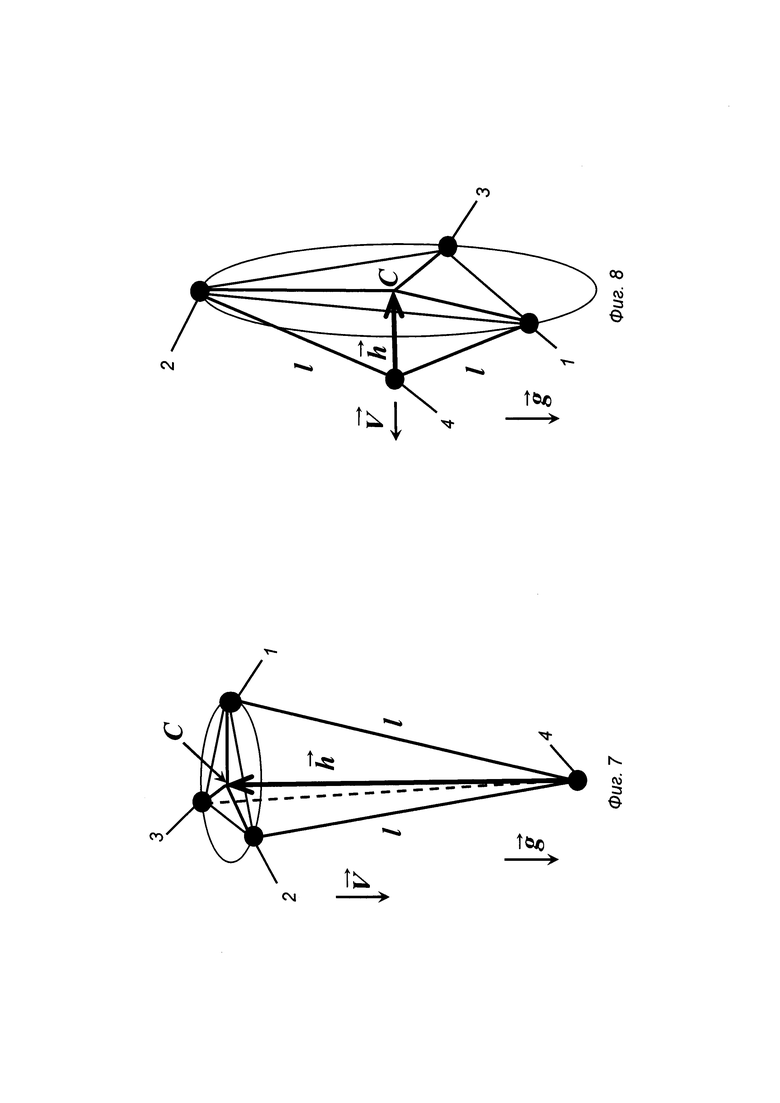
на фиг. 7 - рекомендуемый вариант взаимного расположения системы датчиков давления при вертикальном зондировании исследуемой морской среды;
на фиг. 8 - рекомендуемый вариант взаимного расположения системы датчиков давления при горизонтальном зондировании исследуемой морской среды.
Предлагаемый способ измерений плотности морской воды основан на измерении давления с помощью четырех жестко связанных между собой датчиков давления 1, 2, 3 и 4, перемещаемых в исследуемой морской среде (см. фиг. 1-5 и 7, 8).
На фиг. 1 приняты следующие обозначения:
1, 2, 3, 4 - первый, второй, третий и четвертый датчики давления, соответственно;
α12 - расстояние между первым 1 и вторым 2 датчиками давления;
α23 - расстояние между вторым 2 и третьим 3 датчиками давления;
α31 - расстояние между третьим 3 и первым 1 датчиками давления.
На фиг. 2 приняты следующие обозначения:
1, 2, 3, 4 - первый, второй, третий и четвертый датчики давления, соответственно;
α10 - расстояние между первым 1 и четвертым 4 датчиками давления;
α20 - расстояние между вторым 2 и четвертым 4 датчиками давления;
α30 - расстояние между третьим 3 и четвертым 4 датчиками давления.
На фиг. 3 приняты следующие обозначения:
1, 2, 3, 4 - первый, второй, третий и четвертый датчики давления, соответственно;
α12 - угол между прямой, проходящей через четвертый 4 и первый 1 датчики давления, и прямой, проходящей через четвертый 4 и второй 2 датчики давления;
α13 - угол между прямой, проходящей через четвертый 4 и первый 1 датчики давления, и прямой, проходящей через четвертый 4 и третий 3 датчик давления;
α23 - угол между прямой, проходящей через четвертый 4 и второй 2 датчики давления, и прямой, проходящей через четвертый 4 и третий 3 датчик давления.
На фиг. 4, 5, 7 и 8 приняты следующие обозначения:
1, 2, 3, 4 - первый, второй, третий и четвертый датчики давления, соответственно;
 - расстояние от вершины правильной треугольной пирамиды, в которой расположен датчик 4, до вершин правильного треугольника (основания этой пирамиды), в которых расположены датчики 1, 2 и 3;
- расстояние от вершины правильной треугольной пирамиды, в которой расположен датчик 4, до вершин правильного треугольника (основания этой пирамиды), в которых расположены датчики 1, 2 и 3;
С - центр основания правильной треугольной пирамиды - равностороннего треугольника, в вершинах которого расположены датчики 1, 2 и 3, а в вершине пирамиды расположен датчик 4;
 - вектор, соединяющий вершину правильной треугольной пирамиды и центр основания этой пирамиды - точку С;
- вектор, соединяющий вершину правильной треугольной пирамиды и центр основания этой пирамиды - точку С;
α - угол между пересекающимися прямыми линиями, проходящими через четвертый 4 и первый 1 датчики давления, через четвертый 4 и второй 2 датчики давления, через четвертый 4 и третий 3 датчики давления;
 - вектор ускорения свободного падения;
- вектор ускорения свободного падения;
 - направление вектора ускорения свободного падения;
- направление вектора ускорения свободного падения;
 - вектор скорости движения системы;
- вектор скорости движения системы;
 - направление вектора скорости движения системы при вертикальном зондировании (при погружении зонда) (см. фиг. 7);
- направление вектора скорости движения системы при вертикальном зондировании (при погружении зонда) (см. фиг. 7);
 - направление вектора скорости движения системы при горизонтальном зондировании (см. фиг. 8).
- направление вектора скорости движения системы при горизонтальном зондировании (см. фиг. 8).
На фиг. 6 обозначены:
1 - график зависимости F(α) - погрешности (в относительных единицах) измерения плотности морской воды от угла а при вертикальном зондировании;
2 - график зависимости F(α) - погрешности (в относительных единицах) измерения плотности морской воды от угла а при горизонтальном зондировании.
В качестве датчиков 1, 2, 3 и 4 могут использоваться любые идентичные по конструкции и по параметрам, одинаково ориентированные датчики давления жидкости обтекаемой формы. В качестве датчиков давления могут использоваться, например, датчики с пьезокерамическими чувствительными элементами.
Датчики 1, 2, 3 и 4 размещают на носителе гидрофизической аппаратуры, выполненном, например, в виде гидрологического зонда или буксируемой линии.
Измерение плотности морской воды согласно предлагаемому способу производят следующим образом.
При перемещении в морской среде системы из четырех идентичных датчиков 1, 2, 3 и 4 с их помощью производят измерения давления в четырех точках исследуемой среды.
Взаимное расположение датчиков 1, 2, 3 и 4 (точек измерения давления) относительно друг друга при проведении измерений поясняется чертежами, приведенными на фиг. 1, 2 и 3, а количественные соотношения приведены в формулах (2), (3) и (4):



При этом:
равные между собой расстояния α12, α23, α31 (см. фиг. 1) находятся преимущественно в диапазоне от 0,5 до 5 метров;
равные между собой расстояния α10, α20, α30 (см. фиг. 1), обозначенные в формуле (1) и на фиг. 4, 5, 7 и 8 как расстояние  находятся преимущественно в диапазоне от 1 до 2 метров;
находятся преимущественно в диапазоне от 1 до 2 метров;
равные между собой углы α12, α23, α31 (см. фиг. 3), обозначенные в формуле (1) и на фиг. 4 и 5 как угол а, находятся преимущественно в диапазоне от 45° до 115° с учетом направления зондирования.
Система из четырех датчиков 1, 2, 3 и 4 может перемещаться в морской среде, как показано на фиг. 4 при вертикальном зондировании, например, с помощью гидрологического зонда или, как показано на фиг. 5 при горизонтальном зондировании, например, с помощью буксируемой линии.
Вертикальное зондирование системы датчиков 1, 2, 3 и 4 с помощью гидрологического зонда возможно как сверху вниз, так и снизу вверх.
При вертикальном зондировании морской среды снизу вверх (при всплытии зонда, на котором установлена система датчиков 1, 2, 3 и 4) вектор  анти-параллелен вектору
анти-параллелен вектору  , а при вертикальном зондировании сверху вниз (при погружении зонда) вектор параллелен вектору (см. фиг. 4).
, а при вертикальном зондировании сверху вниз (при погружении зонда) вектор параллелен вектору (см. фиг. 4).
При горизонтальном зондировании вектор перпендикулярен вектору (см. фиг. 5).
При вертикальном зондировании и горизонтальном зондировании морской среды датчик 4, расположенный в вершине правильной треугольной пирамиды, целесообразно размещать по ходу движения впереди датчиков 1, 2 и 3, расположенных в вершинах правильного треугольника, образующего основание этой пирамиды (см. фиг. 7 и фиг. 8).
По результатам измерения давления в четырех точках морской среды с помощью четырех датчиков 1, 2, 3 и 4 расчетным путем по формуле (1) определяют плотность ρ, значение которой изменяется в процессе зондирования. Стандартное значение ускорения свободного падения g=9,81 м/с2, однако при расчетах следует иметь в виду, что значение g может изменяться в зависимости от географической широты места и глубины точки измерения.
Погрешность измерения плотности морской воды зависит от погрешности измерения давления датчиками 1, 2, 3 и 4 и от угла α, под которым пересекаются прямые линии, проходящими через датчики 1, 2, 3 и четвертый датчик давления 4.
Для определения погрешности измерения плотности морской воды в зависимости от угла α, введем в рассмотрение функцию F(α).
Если датчики давления 1, 2, 3 и 4 идентичны, то зависимость погрешности (в относительных единицах) определения плотности от угла а в двух указанных выше типичных случаях ориентации системы датчиков давления 1, 2, 3 и 4 принимает следующий вид:
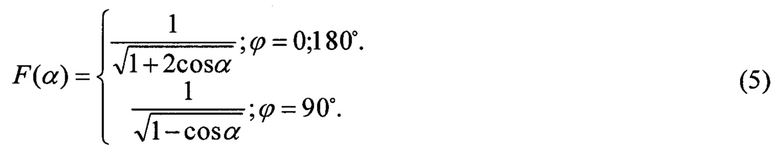
где:
ϕ - угол между векторами -  Графики функции F(a) приведены на фиг. 6. График 1 соответствует параллельности (когда ϕ=180°) и антипараллельности (когда (р=0) векторов
Графики функции F(a) приведены на фиг. 6. График 1 соответствует параллельности (когда ϕ=180°) и антипараллельности (когда (р=0) векторов  и
и  при вертикальном зондировании (фиг. 4, ϕ=0). График 2 соответствует перпендикулярности векторов
при вертикальном зондировании (фиг. 4, ϕ=0). График 2 соответствует перпендикулярности векторов  при горизонтальном зондировании (фиг. 5), когда ϕ=90°.
при горизонтальном зондировании (фиг. 5), когда ϕ=90°.
Из графика 1, приведенного на фиг. 6, видно, что при угле α, равном 90°,
для параллельного и антипараллельного расположения векторов  при вертикальном зондировании значение функции F(α) становится равным единице, и при дальнейшем увеличении угла о. погрешность измерения плотности значительно увеличивается. Поэтому при вертикальном зондировании морской среды угол а. в расположении системы датчиков давления 1, 2, 3 и 4 желательно выбирать не больше 90°, в диапазоне от 45° до 90° (см. фиг. 7). Дальнейшее уменьшение угла а может привести к усложнению конструкции при незначительном снижении погрешности измерения плотности.
при вертикальном зондировании значение функции F(α) становится равным единице, и при дальнейшем увеличении угла о. погрешность измерения плотности значительно увеличивается. Поэтому при вертикальном зондировании морской среды угол а. в расположении системы датчиков давления 1, 2, 3 и 4 желательно выбирать не больше 90°, в диапазоне от 45° до 90° (см. фиг. 7). Дальнейшее уменьшение угла а может привести к усложнению конструкции при незначительном снижении погрешности измерения плотности.
Из графика 2, приведенного на фиг. 6, видно, что при угле α, равном 90°, для перпендикулярного расположения векторов  при горизонтальном зондировании значение функции F(α) становится равным единице, и при уменьшении угла а погрешность измерения плотности значительно увеличивается. Поэтому при горизонтальном зондировании морской среды угол а в расположении системы датчиков желательно выбирать больше 90°, в диапазоне от 90° до 115° (см. фиг. 8).
при горизонтальном зондировании значение функции F(α) становится равным единице, и при уменьшении угла а погрешность измерения плотности значительно увеличивается. Поэтому при горизонтальном зондировании морской среды угол а в расположении системы датчиков желательно выбирать больше 90°, в диапазоне от 90° до 115° (см. фиг. 8).
При этом результат измерения плотности морской воды ρ по формуле (1) не зависит от наклона системы датчиков 1, 2, 3 и 4 в поле силы тяжести.
Таким образом, предлагаемым изобретением решается техническая задача расширения арсенала технических средств измерения плотности морской воды с подвижного носителя гидрофизической аппаратуры. Задача решается за счет создания способа измерения плотности морской воды, основанного на измерении только одного параметра морской среды, а именно давления, с помощью системы идентичных датчиков давления, нечувствительной к наклону в исследуемой среде, и без необходимости дополнительных измерений других гидрофизических параметров морской среды. Независимость результатов измерения плотности морской воды от наклона системы датчиков давления, вызванного, например, наклоном носителя гидрофизической аппаратуры, повышает точность измерения плотности морской воды в реальных условиях исследования морской среды.
Технический результат заключается в реализации назначения изобретения.
Промышленная применимость предлагаемого изобретения определяется тем, что на основании приведенного описания и известных технических средств изобретение может быть использовано для измерения плотности морской воды при исследованиях морской среды с подвижного носителя гидрофизической аппаратуры.
Источники информации
1. Океанология: средства и методы океанологических исследований // Г.В. Смирнов, В.Н. Еремеев, М.Д. Агеев и др.; Междунар. ассоц. акад. наук; РАН; НАНУ. М.: Наука, 2005. - 795 стр.
2. Коротаев Т.К. Оперативная океанография - новая ветвь современной океанологической науки // Вестник РАН, 2018, том 88, №7, стр. 579-588.
3. Греков А.Н., Греков Н.А., Сычев Е.Н. Профилографы скорости звука и алгоритм определения плотности воды для океанографического диапазона // Системы контроля окружающей среды: Севастополь, Институт природно-технических систем. 2017, №8 (28), стр. 11-15.
4. Патент РФ №2441204 на изобретение, МПК G01F 23/14, опубл. 27.01.2012.
5. Патент РФ №2682080 на изобретение, МПК G01B 7/00, G01K 7/16, G01K 13/00, G01L 9/04, G01N 9/00, опубл. 14.03.2019.
6. Патент РФ №2544882 на изобретение, МПК G01N 9/26, опубл. 14.03.2015.
7. Патент РФ №2320975 на изобретение, МПК G01N 9/00, опубл. 27.03.2008, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНЫХ ПУЛЬСАЦИЙ СКОРОСТИ | 2000 |
|
RU2174687C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ТУРБУЛЕНТНЫХ ПЯТЕН В МОРСКОЙ СРЕДЕ | 2001 |
|
RU2175449C1 |
| СПОСОБ ДЕМОНСТРАЦИИ ПРАВИЛА БУРАВЧИКА НА ЗАНЯТИЯХ ПО ФИЗИКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2017 |
|
RU2690058C2 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2008 |
|
RU2376653C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ ДЛЯ ГЕОЭКОЛОГИЧЕСКОГО МОНИТОРИНГА МОРСКИХ НЕФТЕГАЗОНОСНЫХ АКВАТОРИЙ | 2012 |
|
RU2513630C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНЫХ ПУЛЬСАЦИЙ СКОРОСТИ | 2001 |
|
RU2177621C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ МОРСКОЙ СРЕДЫ | 2004 |
|
RU2271617C1 |
Изобретение относится к области исследования параметров морской воды и может быть использовано для измерения плотности морской воды при исследованиях морской среды с подвижного носителя гидрофизической аппаратуры. Сущность предлагаемого изобретения заключается в том, что измерение плотности морской воды при вертикальном зондировании морской среды производят путем измерения давления в четырех пространственно разнесенных точках с помощью системы, состоящей из четырех идентичных одинаково ориентированных датчиков давления обтекаемой формы, установленных на подвижном носителе гидрофизической аппаратуры, при этом три датчика давления расположены на одинаковом расстоянии один от другого и равноудалены от размещенного по ходу движения четвертого датчика давления, а плотность морской воды определяют по формуле:

где: ρ - плотность морской воды, кг/м3,
 - расстояние от четвертого датчика давления до первого, второго и третьего датчиков давления, м;
- расстояние от четвертого датчика давления до первого, второго и третьего датчиков давления, м;
g - ускорение свободного падения, м/с2,
α - угол между пересекающимися прямыми линиями, проходящими через четвертый и первый датчики давления, через четвертый и второй датчики давления, через четвертый и третий датчики давления, град,

Р1, P2, Р3 и Р0 - давления, измеренные, соответственно, первым, вторым, третьим и четвертым датчиками давления, Па. При этом угол α находится в диапазоне от 45° до 90°. Технический результат - расширение арсенала технических средств измерения плотности морской воды за счет создания способа измерения плотности морской воды, основанного на измерении с подвижного носителя гидрофизической аппаратуры только одного параметра морской среды, а именно давления, с помощью системы датчиков давления. 8 ил.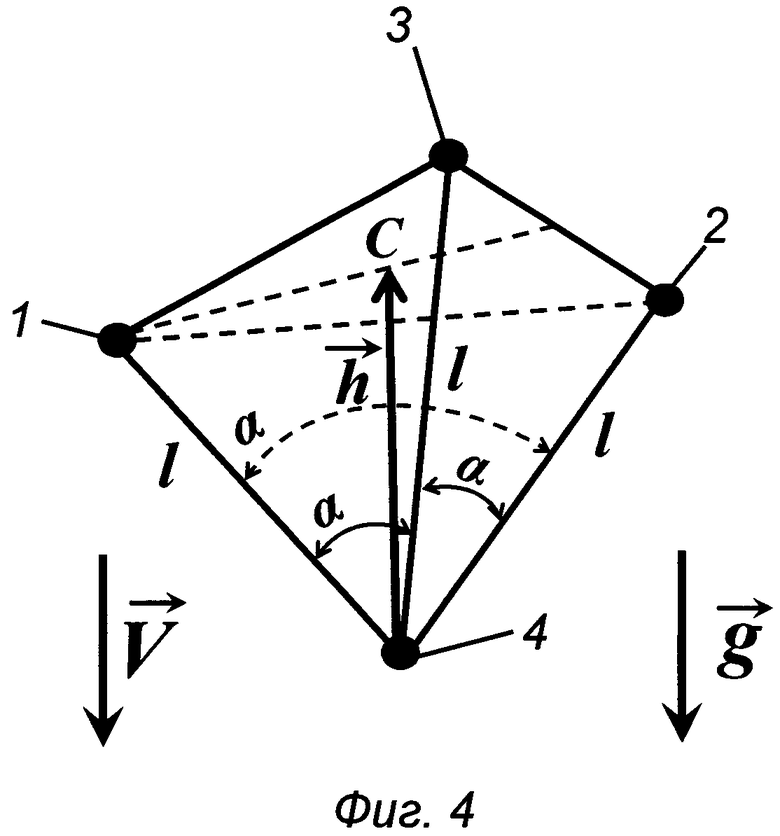
Способ измерения плотности морской воды с подвижного носителя гидрофизической аппаратуры при вертикальном зондировании морской среды, включающий измерение давления в морской среде и определение плотности морской воды расчетным путем, отличающийся тем, что измерение плотности воды производят путем измерения давления в четырех точках с помощью системы, состоящей из четырех идентичных одинаково ориентированных датчиков давления обтекаемой формы, установленных на подвижном носителе гидрофизической аппаратуры, при этом три датчика давления расположены на одинаковом расстоянии один от другого и равноудалены от размещенного по ходу движения четвертого датчика давления, а плотность морской воды определяют по формуле:

где:
ρ - плотность морской воды, кг/м3,
 - расстояние от четвертого датчика давления до первого, второго и третьего датчиков давления, м;
- расстояние от четвертого датчика давления до первого, второго и третьего датчиков давления, м;
g - ускорение свободного падения, м/с2;
α - угол между пересекающимися прямыми линиями, проходящими через четвертый и первый датчики давления, через четвертый и второй датчики давления, через четвертый и третий датчики давления, град,
ΔP1=P1-P0,
ΔР2=Р2-Р0,
ΔР3=Р3-Р0,
Р1 - давление, измеренное первым датчиком давления, Па,
Р2 - давление, измеренное вторым датчиком давления, Па,
Р3 - давление, измеренное третьим датчиком давления, Па,
Р0 - давление, измеренное четвертым датчиком давления, Па,
при этом угол α находится в диапазоне от 45° до 90°.
| Федотов Г.А | |||
| Новая модификация гидростатического метода определения плотности морской воды // Фундаментальная и прикладная гидрофизика, 2013 | |||
| Т | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| С | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Греков А.Н., Греков Н.А., Сычев Е.Н | |||
| Профилографы скорости звука и алгоритм определения плотности воды для океанографического диапазона | |||
| // Системы контроля окружающей среды: | |||

