Изобретение относится к области авиационной техники и может найти применение при создании систем управления самолетами, обеспечивающих бездвигательную посадку самолетов различного назначения.
Известен способ управления самолетом при бездвигательной посадке по методу контрольных точек, заключающийся в том, что заранее рассчитывается глиссада планирования и определяются характерные точки на маршруте захода на посадку (обычно четыре) и потребная высота пролета этих точек. Высоты в контрольных точках для самолета каждого типа определяются практически в полетах. Началом первого, второго, третьего и четвертого разворотов можно исправить расчет. Так, например, если высота в первой контрольной точке оказывается больше заданной, то первый разворот следует начинать позже, когда разница в высоте уменьшится наполовину. Но, если самолет достигнет расчетной высоты начала разворота раньше, разворачиваться следует сразу по достижении этой высоты. На планировании после четвертого разворота у летчика остается только одно эффективное средство уточнить расчет - посадочные закрылки [1].
Известен способ и система управления посадкой Спейс Шаттла, заключающийся в том, что в бортовой вычислитель заложен пакет посадочных траекторий, в конкретном полете из этого пакета выбирается наиболее близкая по начальным условиям траектория. Управление ведется по отклонениям от этой траектории [2, 3, 4, 5].
Известен также способ управления спуском аэрокосмических аппаратов в атмосфере на основе решения многокритериальной задачи [6]. Решение задачи управления движением аппарата проводится в два этапа. На первом этапе, до начала процесса управления, формируются номинальные управляющие зависимости, обеспечивающие достижение цели управления в соответствии с выбранными моделями движения. На втором этапе, во время движения, на основе номинальных формируются командные управляющие зависимости, обеспечивающие выполнение целевой задачи в реальных условиях функционирования системы управления.
По своему назначению и функциональным возможностям наиболее близким к заявляемому способу управлению является способ [6], который был принят авторами в качестве прототипа.
Прототип имеет следующий недостаток: ограниченность работоспособности, когда условия полета отличаются от номинальных. Это, как правило, приводит к значительному сокращению области достижимости, реализуемой системой управления, по сравнению с областью возможного маневра летательного аппарата.
Целью предлагаемого изобретения является устранение вышеуказанного недостатка.
Указанная цель достигается тем, что в основу предлагаемого способа управления самолетом при бездвигательной посадке, заключающегося в том, что в бортовой вычислитель самолета закладывают алгоритмы вычисления посадочных траекторий и в полете компьютер выдает траекторию для текущих условий и команды управления по этой траектории, положен метод терминального управления, обеспечивающий периодический прогноз конечного состояния и расчет посадочной траектории самолета, причем на каждом такте текущее состояние самолета принимается за начальное. Это позволяет расширить области начальных условий, в которых может функционировать система управления, и повысить эффективность использования возможностей экипажа. В систему управления, реализующую этот способ и содержащую стандартное приборное оборудование и вычислительную систему, дополнительно введена интеллектуальная система "Помощник летчика" (ИСПЛ), содержащая математическую модель, производящую расчет прогнозирующих траекторий, и интеллектуальную надстройку (экспертную систему), которая в зависимости от результата, полученного в математической модели, производит выбор прогнозирующей траектории и изменение заданного аэродинамического качества самолета. ИСПЛ выполнена в виде автономного программного модуля, входящего в вычислительную систему самолетовождения (ВСС), на вход которого поступают сигналы с информационно-измерительного комплекса (ИИК), определяющие текущий вектор состояния самолета, а с выхода сигналы, идущие на средства отображения информации (СОИ), характеризующие прогнозирующую траекторию, и на систему автоматического управления (САУ) при полете в автоматическом режиме управления.
Сущность данного изобретения поясняется графическими материалами:
на фиг.1 - алгоритм терминального управления самолетом при бездвигательной посадке;
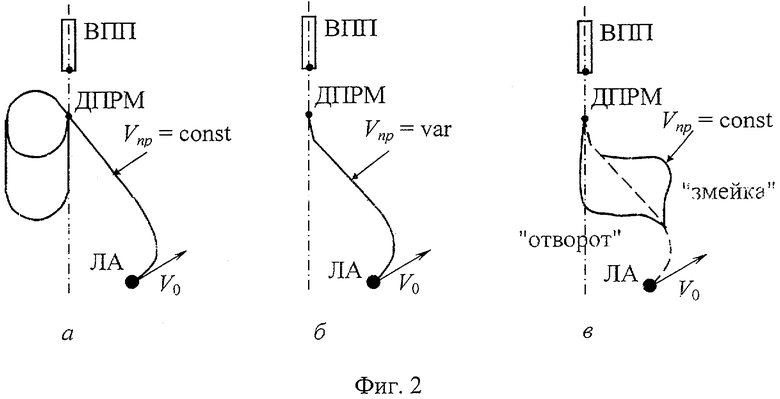
на фиг.2 - виды траекторий захода на посадку;
на фиг.3 - структурная схема системы управления полетом при бездвигательной посадке.
Задача бездвигательной посадки разделена на два этапа, на которых применяются различные алгоритмы управления:
1) выведение самолета с заданной точностью на ключевую точку (дальний приводной радиомаяк - ДПРМ), над которой самолет должен оказаться с заранее заданными параметрами полета (высота над ДПРМ Hприв., приборная скорость над ДПРМ Vприв., курс взлетно-посадочной полосы (ВПП) Ψвпп, боковое отклонение от оси ВПП Z=0, расстояние от ДПРМ до кромки ВПП Xприв.);
2) стабилизация жестко заданной траектории от ДПРМ до ВПП.
На первом этапе применяется метод терминального управления. Суть его заключается в следующем. В процессе управления через определенные промежутки времени производится прогноз конечного состояния при заданной функции управления в зависимости от выбранного критерия качества. Максимальное использование области достижимости реализуется при прогнозировании по экстремальному управлению, т.е. такому управлению, которое обеспечивает перевод самолета из начального положения в конечное ценой минимального расхода удельной полной механической энергии:
где Еуд - удельная полная механическая энергия;
НЭ - энергетическая высота;
Н - высота полета самолета;
V - воздушная скорость полета самолета;
g≈9.81 м/с2 - ускорение свободного падения.
При постоянной приборной скорости удельная полная механическая энергия является однозначной функцией высоты Н:
где ρ0=0.125 кг·с2/м4 - плотность воздуха на высоте Н=0;
ρн - плотность воздуха на текущей высоте полета самолета;
Vпр - приборная скорость.
Тогда при прогнозе может быть использован следующий критерий качества
где Нк - заданная высота над ключевой точкой (ДПРМ);
γ∈Uдоп - угол крена, принадлежащий области допустимых управлений.
Этот критерий требует найти траекторию, переводящую самолет из начального состояния в конечное ценой минимальной потери высоты при постоянной приборной скорости.
После определения управления, минимизирующего функционал, может быть найдена траектория и значение функционала, которое и есть величина расхода высоты на найденной траектории. После этого можно определить запас высоты в конечной точке, который получится при полете по экстремальной траектории:
ΔHк=H0-I-Hк.
Именно по этому параметру ΔHк и необходимо осуществлять управление, т.к. реализовывать следует траекторию, на которой ΔHк=0.
Таким образом, задача управления сводится к выбору отклонений от оптимального управления, сводящих к нулю ΔНк, и может быть осуществлена в классе систем с обратной связью, но не по текущему, а по конечному параметру ΔHк.
Разработан алгоритм, который позволяет вести управление в зависимости от значения запаса высоты в ключевой точке ΔHк, используя всего лишь три вида маневров (фиг.1):
- полет в конечное состояние по экстремали с последующим рассеянием ΔHк с помощью замкнутых траекторий типа "гибкий цилиндр" (фиг.2, а); это возможно при наличии избытков ΔHк, больших некоторого заданного значения ΔHк в, зависящего от максимального аэродинамического качества Кmax и располагаемых значений крена γmax;
- рассеяние ΔHк изменением текущего аэродинамического качества путем управления углом атаки (приборной скоростью равновесного планирования Vпр); этот вид маневра, названный "заход с прямой" (фиг.2, б), можно применять при малых значениях избытка ΔHк н, зависящих от диапазона допустимых Vпр и К;
- при ΔHк н<ΔHк<ΔHк в, т.е. средних избытках энергетической высоты, которых не хватает на выполнение повторного захода и которые невозможно рассеять управлением по углу атаки, следует выполнять маневр удлинения траектории типа "змейка" или "отворот" (фиг.2, в).
Алгоритм, представленный на фиг.1, реализуется следующим образом. Сначала проверятся возможность выполнения "гибкого цилиндра" 1: рассчитывается двукратное прохождение ключевой точки. Если запас высоты в конце траектории положительный, то идет расчет удлиняющих прямолинейных участков для того, чтобы свести его к нулю и реализуется траектория "удлиненный гибкий цилиндр" 2.
Если получается отрицательный запас высоты на траектории "гибкий цилиндр", то эта траектория нереализуема. Тогда рассчитывается траектория "заход с прямой" 3. Если на траектории "заход с прямой" получается отрицательный запас высоты, то посадка на данный аэродром невозможна 4. Если запас высоты положительный, то в зависимости от его величины осуществляется выбор одного из видов маневров для рассеяния этого запаса: если запас невелик, то излишки высоты рассеиваются с помощью вертикального маневра 5 путем изменения заданной приборной скорости Vпр зад, а значит, и аэродинамического качества Кзад, а если запас велик, то реализуется маневр "змейка" или "отворот" 6.
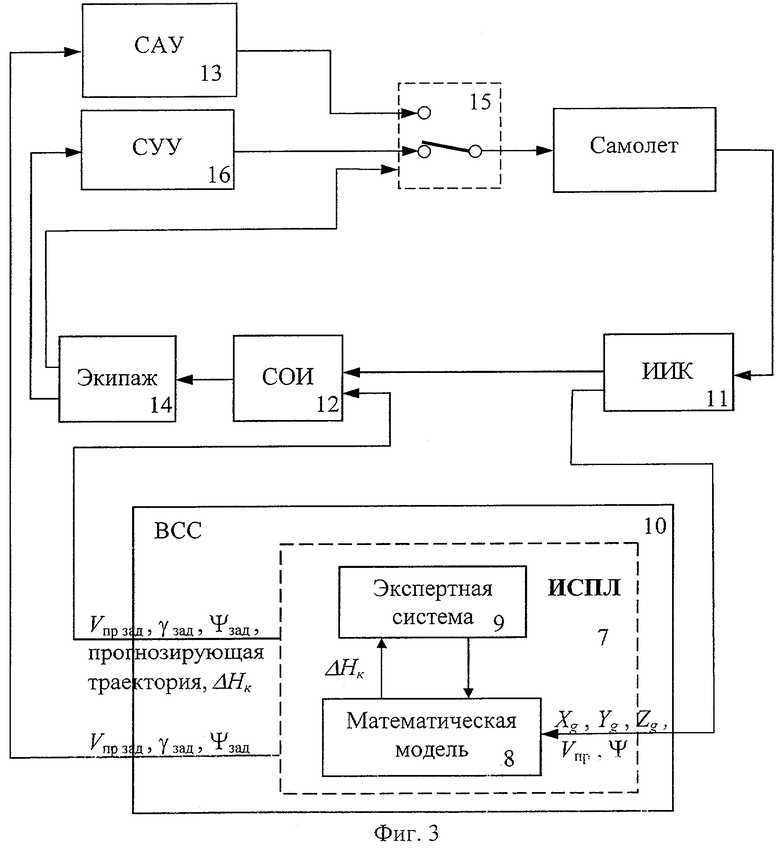
Для реализации предлагаемого способа управления самолетом при бездвигательной посадке разработана интеллектуальная система "Помощник летчика" (ИСПЛ) по бездвигательной посадке (фиг.3) 7, состоящая из
- математической модели 8, в которой производится расчет прогнозирующих траекторий,
- интеллектуальной надстройки (экспертной системы) 9, в которой в зависимости от результата, полученного в математической модели, производится выбор другой прогнозирующей траектории или изменение аэродинамического качества.
ИСПЛ выполнена в виде автономного программного модуля, входящего в вычислительную систему самолетовождения (ВСС) 10, на вход которого поступают сигналы с информационно-измерительного комплекса (ИИК) 11, определяющие текущий вектор состояния самолета, а с выхода сигналы, идущие на средства отображения информации (СОИ) 12, характеризующие прогнозирующую траекторию, и на систему автоматического управления (САУ) 13 при полете в автоматическом режиме управления. В каком режиме осуществлять управление бездвигательной посадкой самолета решает экипаж 14 путем нажатия соответствующих кнопок в кабине. Эта возможность выбора режима управления показана в виде переключателя 15. В ручном режиме экипаж управляет самолетом через систему улучшения устойчивости и управляемости (СУУ) 16.
В контуре управления самолетом ИСПЛ по бездвигательной посадке выполняет следующие функции:
1) выработка оптимальной стратегии управления бездвигательной посадкой (расчет и выдача на систему СОИ рациональной траектории захода на посадку, а также подсказок экипажу);
2) управление самолетом в автоматическом режиме.
Технико-экономическая эффективность
ИСПЛ по бездвигательной посадке представляет собой набор алгоритмов, которые загружаются в ВСС. Поэтому для реализации предлагаемого способа управления не требуется установки новых приборов и устройств на борту самолета.
При выполнении захода на посадку и посадки с неработающими двигателями не причиняется вреда окружающей среде за счет отсутствия эмиссии и шума двигателей и реализуется экономия топлива.
Кроме того, предлагаемый способ управления позволяет повысить эффективность использования возможностей экипажа, т.к. применение прогнозирования в системах управления соответствует характеру функциональной деятельности летчика, который в соответствии с конечным результатом прогноза строит процесс управления.
Таким образом, предлагаемый способ обеспечивает выполнение посадки самолета с неработающими двигателями в эргатической (т.е. человеко-машинной) системе управления при широком диапазоне изменения разнообразных факторов, присущих как внешней среде, так и самому объекту управления.
С использованием материалов данного изобретения проведены компьютерное моделирование и испытания на комплексном пилотажном стенде тяжелого самолета демонстрационного прототипа ИСПЛ по бездвигательной посадке.
Проведенные исследования подтвердили правильность выбранного технического решения и его технико-экономическую эффективность. Получен положительный отзыв летного состава.
Источники информации
1. Летчику о практической аэродинамике. Под ред. гвардии полковника И.М.Медведева. Воениздат, 1961.
2. "Техническая информация" ЦАГИ, 1975, №12, стр.4, 7.
3. "Техническая информация" ЦАГИ, 1976, №17-18.
4. Space Flight, 1976, v.18, №6, pp.214, 215.
5. Aircraft Engineering, 1977, v.49, №7, р.8.
6. Гераськин М.И. Терминальное управление спуском аэрокосмических аппаратов в атмосфере на основе решения многокритериальной задачи. Автореферат диссертации на соискание ученой степени кандидата технических наук. Специальность 05.07.09. Самара, 1997, Самарский гос. аэрокосм. ун-т им. С.П.Королева.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ЭЛЕКТРОННОЙ ИНДИКАЦИИ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2219108C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
Изобретение относится к области авиационной техники и может найти применение при создании систем управления самолетами, обеспечивающих бездвигательную посадку самолетов различного назначения. В основу предложенного способа положено терминальное управление (управление конечным состоянием), при котором производится периодический прогноз конечного состояния при заданной функции управления в зависимости от выбранного критерия качества. При этом на каждом такте текущее состояние самолета принимается за начальное. Критерием качества является запас высоты в ключевой точке при реализации одного из трех типов прогнозирующих траекторий («гибкого цилиндра», «захода с прямой» и «отворота»). Предложенная система включает в себя информационно-измерительный комплекс, средства отображения информации, систему автоматического управления, систему улучшения устойчивости и управляемости, вычислительную систему самолетовождения, а также дополнительно введенную интеллектуальную систему "Помощник летчика" и работает по набору алгоритмов, загружаемых в бортовой вычислитель. Для осуществления управления самолетом не требуется установки новых приборов и устройств на его борту. При выполнении захода на посадку и посадки с неработающими двигателями не причиняется вреда окружающей среде за счет отсутствия эмиссии и шума двигателей и реализуется максимальная экономия топлива. Кроме того, группа изобретений позволяет повысить эффективность использования возможностей экипажа, так как применение прогнозирования в системах управления соответствует характеру функциональной деятельности летчика, который в соответствии с конечным результатом прогноза строит процесс управления. 2 н.п. ф-лы, 3 ил.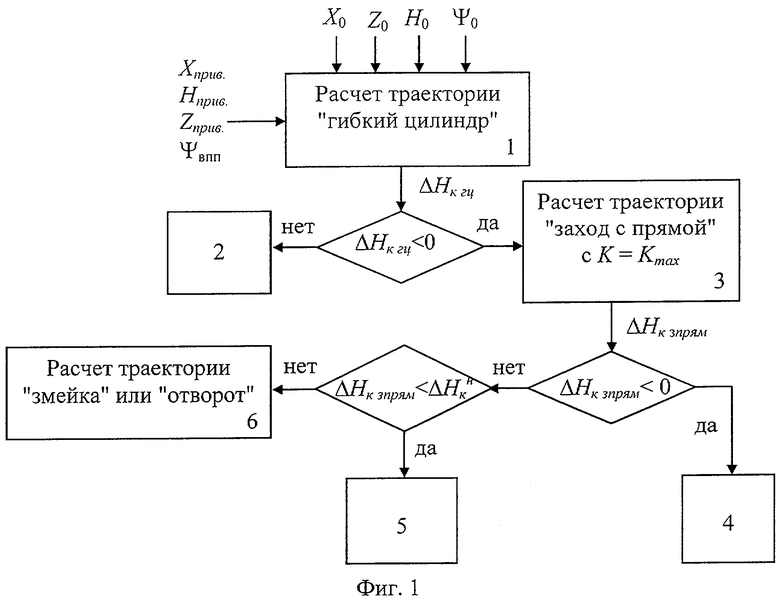
где Еуд - удельная полная механическая энергия;
НЭ - энергетическая высота;
Н - высота полета самолета;
g≈9,81 м/с2 - ускорение свободного падения;
ρ0=0,125 кГ·c2/м4 - плотность воздуха на высоте Н=0;
ρн - плотность воздуха на текущей высоте полета самолета;
Vпр - приборная скорость,
используют критерий качества в виде функционала
где Нк - заданная высота над ключевой точкой;
γ∈Uдоп - угол крена, принадлежащий области допустимых управлений,
далее определяют запас высоты в конечной точке
ΔHк=H0-I-Hк,
и в зависимости от его значения выбирают и реализуют один из трех видов маневров
"гибкий цилиндр" - при наличии избытков ΔНк, больших некоторого заданного значения ΔНк в, зависящего от максимального аэродинамического качества Кmax и располагаемых значений крена γmax;
"заход с прямой" - при малых значениях избытка ΔНк н, зависящих от диапазона допустимых приборной скорости Vпр и К; или
"отворот" - при ΔHк н<ΔHк<ΔHк в, т.е. средних избытках энергетической высоты, которых не хватает на выполнение повторного захода и которые невозможно рассеять управлением по углу атаки.
| ГЕРАСЬКИН М.И | |||
| Терминальное управление спуском аэрокосмических аппаратов в атмосфере на основе решения многокритериальной задачи: Автореферат диссертации на соискание ученой степени кандидата технических наук | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| - Самара: Самарский гос | |||
| аэрокосмический ун-т им | |||
| С.П.Королева, 1997 | |||
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2003 |
|
RU2239203C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |

