Заявляемая группа изобретений относится к области вопросов, связанных с повышением безопасности полетов гражданской авиации, а именно к повышению уровня безопасности при выполнении посадок на необорудованный аэродром, который не содержит какого бы то ни было посадочного оборудования.
Исходя из этого эффективным повышением указанного уровня безопасности следует считать решение задачи по снижению параметров метеоминимума погоды (ПММ) до категории ICAO (Нв ≤ 60 м - значение вертикальной видимости; Lв ≤ 800 м - значение горизонтальной дальности видимости) с использованием на аэродроме общепринятых радионавигационных точек (ориентиров).
Подчеркнем, что сегодня такие результаты достигают только с использованием специализированного посадочного оборудования, а именно с использованием систем типа ПРМГ-4КС, ПРМГ-5 и им подобных [1, с. 18].
Актуальность решения такой задачи более чем очевидна: 53% всех авиационных происшествий происходит при выполнении заходов на посадку в сложных метеоусловиях (СМУ), при этом 62% авиационных происшествий, обусловленных неблагоприятными факторами, относят к ухудшению метеовидимости. Основными причинами такого положения дел являются отказы техники и ошибочные действия летчика в контуре отказобезопасности (75% всех катастроф происходит из-за ошибок летного состава).
Приведенные данные являются результатами исследований ICAO обработкой статистики за 21 год по всем странам-членам ICAO [3, с. 24, 150].
К радионавигационным ориентирам (навигационному оборудованию аэродромов) относят (А. А. Кузнецов, В.И. Дубровский, А.С. Уланов "Эксплуатация средств управления воздушным движением", Справочник.- М.: Транспорт, 1983, глава 5, с. 61-79):
1) международную радиотехническую систему ближней навигации типа VOR/DME, предназначенную для непрерывного автоматического определения местоположения летательного аппарата (ЛА) и обеспечения его привода в любую точку в пределах зоны действия системы;
2) автоматический радиопеленгатор типа АРП-7С, предназначенный для индикации азимута ЛА, излучающего радиосигналы по каналам авиационной связи;
3) приводные радиостанции типа АПР-8, предназначенные для обеспечения полетов ЛА, оборудованных автоматическими радиокомпасами.
Перечисленное оборудование может быть использовано как автономно, так и в комплексе, создавая систему обеспечения для захода на посадку на взлетно-посадочную полосу (ВПП), например варианты:
- первая система содержит ВПП + VOR/DME;
- вторая система содержит ВПП + VOR/DME + АРПМ-7С;
- третья система содержит ВПП + VOR/DME + АПР-8;
- четвертая система содержит ВПП + VOR/DME + АРПМ-7С + АПР-8.
По критерию минимальной достаточности за прототип принимается первая система, к основным характеристикам которой следует отнести следующие [2, с. 68-69]:
1) нормы на основные характеристики радиомаяков VOR (измерение азимута) и DME (измерение дальности) установлены ICAO. Система VOR/DME является стандартной для обеспечения полетов на зарубежных международных воздушных трассах;
2) основные параметры радиомаяка VOR: зона действия 0-40o, общая погрешность определения азимута ΔA ≤ 3,6o;
3) Основные параметры радиомаяка DME: дальность действия до 370 км; общая погрешность определения дальности ΔD = 370 м.
Эти характеристики указывают на недостаточную точность для обеспечения посадки в СМУ по категориям ICAO. Следовательно, система ВПП + VOR/DME непригодна для снижения ПММ и повышения уровня безопасности при выполнении посадок в СМУ на необорудованный аэродром.
В практике известен один способ захода на посадку летательного аппарата с принятием решения в одной заданной точке, суть которого заключается в следующем (С.А. Микоян, А.Г. Корбут, "Заход на посадку по приборам".- М.: Воениздат, 1979, раздел "Способы захода на посадку", с. 58-59):
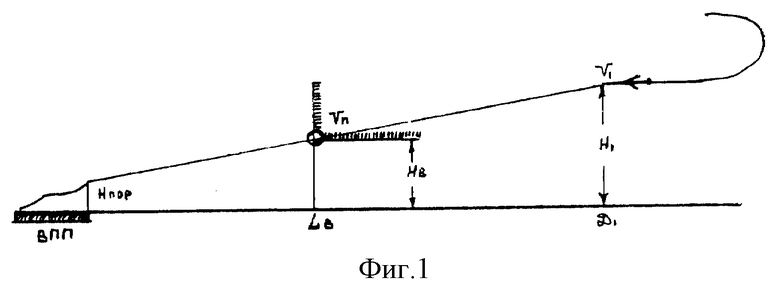
"Процесс привода самолета на аэродром для посадки (с использованием системы обеспечения, содержащей ВПП с наземными радиотехническими ориентирами - прим. автора) состоит из следующих этапов захода (фиг. 1):
- начального этапа захода на посадку, т.е. предпосадочного маневра, который заключается, как правило, в выполнении одного, двух или четырех разворотов для выхода самолета на заданную линию посадки (ЗЛП) в зону действия посадочной системы (система обеспечения захода на посадку - прим. автора);
- заключительного этапа захода на посадку, представляющего собой полет по глиссаде снижения для выхода в точку принятия решения, после прохода которой выполняется визуальная посадка (с использованием визуальных ориентиров)".
Поскольку других способов по выполнению начального и заключительного этапов захода на посадку не известно, то описанный способ принимается и за аналог, и за прототип.
Анализ принятого за прототип способа позволил выделить следующие основные его недостатки. Принятие решения в одной точке требует достижения высокой точности в масштабе времени одновременно как в горизонтальной, так и в вертикальной плоскостях, что не только повышает нагрузку летчика (с точки зрения управления), но и требует жесткой глиссады, а следовательно, специализированного посадочного оборудования типа указанных ПРМГ - со снижением надежности системы в целом. Следовательно, логика способа-прототипа не способствует снижению ПММ и повышению уровня безопасности при выполнении посадок в СМУ. Помимо этого применительно к вертолету одновременное выполнение торможения и снижения (на заключительном этапе) по приборам (вслепую) до малых высот и скоростей вызывает у летного состава повышенную нагрузку с учетом аэродинамики вертолета, не обеспечивающей классического планирования, что не способствует снижению ПММ и повышению уровня безопасности при выполнении полетов в СМУ.
Таким образом, в известном устройстве и способе не достигают технического результата, выраженного в снижении ПММ и повышении безопасности полетов при выполнении посадок в СМУ на необорудованный аэродром.
Указанный технический результат достигается тем, что в способе захода на посадку летательного аппарата (ЛА), заключающемся в том, что с помощью системы обеспечения, содержащей ВПП с наземными ориентирами, выполняют предпосадочный маневр, осуществляют снижение и производят посадку, перед посадкой выполняют опорный полет с коррекцией боковых отклонений по ориентирам, расположенным перед ВПП.
Кроме того, целесообразно выполнение полета с коррекцией боковых отклонений осуществлять над минимально безопасной высотой.
Кроме того, коррекцию могут завершать до пролета заданной дальности Lпод начала подхода к ВПП, определяемой по формуле Lпод = Vп (Hоп - Hпор)/VУп, а к посадке приступают после пролета заданной дальности Lв = VпТл,
где Vп - скорость подхода к ВПП;
Hоп - минимально безопасная высота для выполнения опорного полета над ней с коррекцией боковых отклонений;
Hпор - высота, над которой выполняют пролет порога ВПП;
VУп - вертикальная скорость при подходе к ВПП;
Tл - время, необходимое летчику для визуальной оценки полетной обстановки, причем указанные дальности обозначают соответствующими ориентирами.
Кроме того, при вертикальной посадке снижение осуществляют в два этапа, сначала выполняют торможение, а затем осуществляют снижение со скоростью, достигнутой в торможении.
Технический результат достигается также тем, что система обеспечения захода на посадку ЛА, содержащая ВПП с наземными ориентирами, снабжена дополнительными ориентирами, предназначенными для коррекции боковых отклонений при опорном полете перед посадкой.
Кроме того, дополнительные ориентиры могут быть приподняты над землей на различную высоту для создания искусственного рельефа местности и могут быть выполнены в виде пластин.
Таким образом, заявляемое изобретение представляет собой техническое решение поставленной задачи, является новым, промышленно применимым и обладают изобретательским уровнем. В процессе проведения поиска не обнаружено источников технической и патентной информации, описывающих техническое решение, совпадающее с совокупностью существенных признаков заявляемого изобретения и обеспечивающее тот же технический результат.
На фиг. 1 показана схема захода на посадку по прототипу.
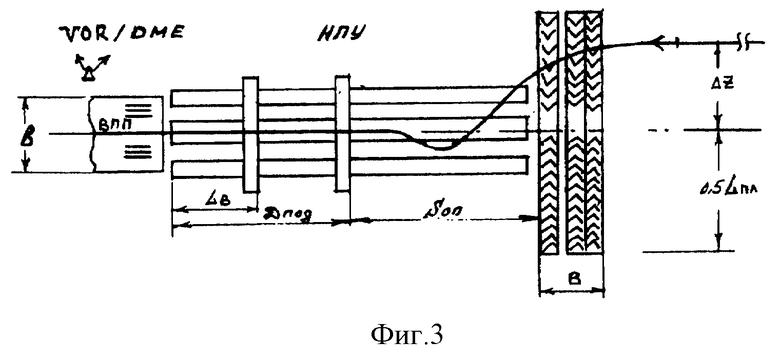
На фиг. 2 - схема предложенного способа захода на посадку.
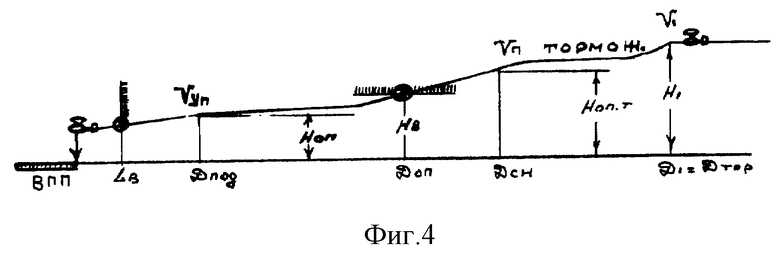
На фиг. 3 - схема предложенной системы.
На фиг. 4 - схема захода на посадку для вертолета с вертикальной посадкой.
Система обеспечения захода на посадку содержит ВПП и следующие наземные ориентиры:
1. Азимутальный радиомаяк VOR, который состоит из антенной системы, передающего устройства, контрольно-юстировочной аппаратуры. Электронные устройства собраны на полупроводниковых приборах и конструктивно оформлены в виде съемных функциональных модулей (блоков), размещенных в аппаратной кабине. Аппаратная кабина расположена под антенной системой маяка. Предусмотрены дистанционное управление и контроль за работой маяка [2, с. 70-79].
2. Дальномерный радиомаяк DME, который состоит из антенной системы, приемного и передающего устройства и контрольно-юстировочной аппаратуры. Все оборудование выполнено в виде съемных функциональных модулей (блоков) и размещено в аппаратурной кабине, расположенной под антенной системой. В состав радиомаяка входят устройства дистанционного управления и контроля работы аппаратуры (см. там же).
Наземное посадочное устройство (НПУ) состоит из дополнительных ориентиров-пластин (площадок), расположенных перед ВПП, как это показано на фиг. 3. Продольные пластины служат ориентирами для выполнения опорного полета по фактической линии посадки (ФЛП). При этом летчик привычно используeт боковой обзор, не имеющий практических ограничений. Поперечные пластины служат ориентирами для определения рубежей оставшейся дальности до ВПП, а также для обозначения линий естественного горизонта. Первые поперечные пластины имеют разметку, указывающую направление полета на ФЛП, и в совокупности своей они создают информационное поле НПУ, продольный размер которого учитывает время, необходимое летчику для оценки полетной обстановки при переходе на визуальное управление. При этом поперечный размер информационного поля соответствует возможным боковым отклонениям (ΔZ). Помимо этого пластины могут быть приподняты над землей на различную высоту, создавая таким образом искусственный рельеф местности перед ВПП. Обоснование размеров схемы размещения пластин приведены ниже при рассмотрении примера конкретной реализации в цифрах.
Поскольку величина скорости Vп определяет потребные размеры ВПП и НПУ, а они в свою очередь определяют соответственно место установки системы VOR/DME и рубеж дальности ее использования в качестве средства коррекции координат, то такая взаимосвязь увязывает ВПП + VOR/DME + НПУ в единую систему обеспечения захода на посадку.
При заходе на посадку координаты ЛА рассчитываются в бортовом вычислителе с точностью одного из режимов автономного счисления: курсовоздушного, курсодоплеровского, курсоинерциального либо их сочетания. Но поскольку этих точностей недостаточно даже для построения предпосадочного маневра, то на борту ЛА производят коррекцию координат с использованием VOR/DME до выхода на рубеж дальности более точной коррекции координат с использованием НПУ. Есть два варианта использования НПУ.
Первый вариант - это глазомерная коррекция (устранение боковых отклонений) после визуального обнаружения пластин (ориентиров НПУ) с рубежа заданной дальности, соответствующей высоте вертикальной видимости Hв.
Второй вариант - это инструментальная коррекция координат с использованием радиовысотомера в том случае, когда пластины имеют различную высоту приподнятости над землей и создают таким образом перед ВПП контрастный искусственный рельеф местности по заранее заданной схеме.
В заявляемом изобретении первый вариант принимается за основной, а второй вариант целесообразен для решения задачи беспилотной посадки.
Заход на посадку с принятием решения в двух заданных точках заключается (фиг. 2) в том, что с использованием системы обеспечения, содержащей ВПП и наземные ориентиры (VOR/DME + НПУ) с заданными в бортовом вычислителе параметрами полета, выполняют предпосадочный маневр с четырьмя разворотами с выходом на заданную приборную линию посадки на заданной высоте H1 с заданной скоростью V1. После пролета заданной дальности D1 осуществляют снижение для выхода на высоту вертикальной видимости Hв (первая точка принятия решения), после пролета которой устанавливают визуальный контакт с подстилающей поверхностью (с информационным полем из пластин НПУ). Затем осуществляют коррекцию боковых отклонений следующим образом. Выполняют опорный полет над минимально безопасной высотой Hоп с глазомерным доворотом по курсу и полетом по фактической линии посадки, обозначенной ориентирами (пластинами) НПУ. Затем после пролета заданной дальности Lпод (что определяют по поперечной пластине НПУ) производят подход к ВПП с заданными скоростями: Vп - поступательной и VУп - вертикальной (скорость Vп достигают до начала опорного полета). После пролета заданной дальности горизонтальной видимости ВПП (Lв), что соответствует второй точке принятия решения, производят визуальную посадку с пролетом порога ВПП над заданной высотой Hпор (дальность Lв обозначена поперечной пластиной НПУ).
Применительно к вертолету (фиг. 4) после предпосадочного маневра сначала выполняют торможение от скорости V1 до скорости Vп в коридоре заданных высот (H1 > Hоп.т.), а затем после пролета заданной дальности (Dсн), осуществляют снижение (полет) до высоты Hв, выдерживая скорость Vп постоянной. После пролета высоты Hв принимают первое решение и, как указано выше для самолета, выполняют опорный полет, подход и визуальную посадку.
Исходные данные и формульные соотношения для расчета параметров профиля захода на посадку и характеристик НПУ на примере опыта эксплуатации самолетов и вертолетов среднего класса по критерию величины посадочной скорости (скорости подхода к ВПП) следующие.
Исходные данные, принятые для самолета:
Vп = 210 км/ч - скорость подхода к ВПП;
V1 = 350 км/ч - скорость для начала захода;
θгл = 2,7o - угол наклона стандартной глиссады на участке снижения [1, с. 14].
Источники информации
1. С. А. Микоян, А.Г. Корбут "Заход на посадку по приборам", М.: Воениздат, 1979.
2. А. А. Кузнецов, В.И. Дубровский, А.С. Уланов "Эксплуатация средств управления воздушным движением". Справочник.- М.: Транспорт, 1983.
3. В.И. Жулев, B.C. Иванов "Безопасность полетов летательных аппаратов". - М.: Транспорт, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБУЧЕНИЯ ПИЛОТА ПОСАДКЕ САМОЛЕТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 2002 |
|
RU2225039C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ КОНТРОЛЯ СНИЖЕНИЯ ПРИ ПОСАДКЕ ВОЗДУШНОГО СУДНА В УСЛОВИЯХ ОТСУТСТВИЯ ВИЗУАЛЬНОЙ ВИДИМОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2016 |
|
RU2631264C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ ОБУЧЕНИЯ ЛЕТЧИКА УПРАВЛЕНИЮ ЛЕТАТЕЛЬНЫМ АППАРАТОМ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2001 |
|
RU2213375C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
Изобретение относится к авиации. Способ захода на посадку летательного аппарата (ЛА) состоит в том, что с помощью системы обеспечения, содержащей взлетно-посадочную полосу (ВПП) с наземными ориентирами, выполняют предпосадочный маневр, осуществляют снижение и производят посадку. Перед посадкой выполняют опорный полет над минимально безопасной высотой с коррекцией боковых отклонений по ориентирам, расположенным перед ВПП. Коррекцию боковых отклонений завершают до пролета заданной дальности начала подхода к ВПП, определяемой по зависимости, указанной в формуле. Система содержит дополнительные ориентиры, предназначенные для коррекции боковых отклонений при опорном полете. Они могут быть приподняты над землей на различную высоту для создания искусственного рельефа местности и выполнены в виде пластин. Выполненные предложенным образом способ посадки и система для его обеспечения позволяют повысить безопасность посадок в сложных метеоусловиях на необорудованный аэродром. 2 с. и 5 з.п.ф-лы, 4 ил.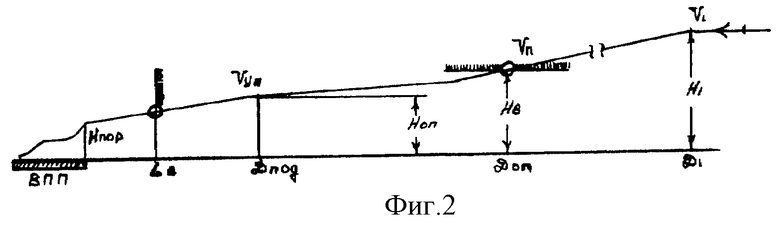
| US 3868778 A, 04.03.1975 | |||
| US 5940014 A, 17.08.1999 | |||
| Паровозный котел | 1928 |
|
SU10685A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ГИДРОЛЕТАТЕЛЬНОГО АППАРАТА (ГДЛА) НА ВОДУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2135399C1 |
| US 3964015 A, 15.06.1976 | |||
| ПИТАТЕЛЬНАЯ СРЕДА ДЛЯ ВЫДЕЛЕНИЯ И КУЛЬТИВИРОВАНИЯ L-ФОРМ БРУЦЕЛЛ | 2009 |
|
RU2415918C2 |

