Область техники
Изобретения относятся к области авиации, более конкретно, к радиотехническим системам посадки летательного аппарата (ЛА), и могут быть использованы для обеспечения посадки на необорудованных аэродромах и вертолетных площадках, в комплексе с другими посадочными системами, в качестве резервной системы управления полетами в районе аэродрома.
Уровень техники
Известна наземная радиолокационная система посадки (РСП), в которой определение положения самолета в пространстве осуществляется с помощью наземной радиолокационной станции (РЛС), информация об отклонениях самолета от заданной траектории передается на его борт по радио. Это обстоятельство позволяет существенно упростить бортовую радиоприемную аппаратуру. РЛС получили распространение в военно-морской авиации для посадки самолетов на авианосцы. (Белогородский С.Л. «Автоматизация управления посадкой самолета». Москва. «Транспорт», 1972. 352 с. ) РСП применяют как без использования других посадочных систем, так и совместно с оборудованием системы посадки (ОСП), чем достигается более низкий метеоминимум, чем при использовании отдельных систем. При заходе самолета на посадку по курсо-глиссадным системам (КГС) РСП применяется для целей наземного контроля захода на посадку, а также как дублирующие системы (на случай выхода из строя радиомаяков). РСП устанавливается примерно посередине ВПП, на удалении от ее оси на 120-180 м. и позволяет обслуживать оба направления посадки на одной и даже на двух соседних ВПП (Верещака А.И., Олянюк П.В. «Авиационное радиооборудование». Москва,«Транспорт», 1996,343 с., museum.radioscanner.ru/avionika/aviomuzejs/rsp_7/rsp_7.html, www.hist.rloc.ru/lobanov/6_16_3.htm, www.aerotechnica.ua/Russian/rsp10.html).
Недостатком РСП является управление самолетом голосом по радио, характеризующееся запаздыванием, складывающимся из запаздывания определения отклонения самолета и запаздывания передачи сообщения диспетчером, осознания и выполнения команды пилотом, реакции самолета на отклонение рулей. Это приводит к сравнительно высокому метеоминимуму посадки.
Известна система посадки ОСП (оборудование системы посадки), устанавливаемая отдельно или являющаяся дублирующей для более точных систем. В состав ОСП обычно входят ближний приводной радиомаркерный пункт (БПРМ) и дальний приводной радиомаркерный пункт (ДПРМ), включающие в себя приводную радиостанцию (ПРС) и маркерный радиомаяк (МРМ). Диапазон частот ПРС 150÷1300 кГц. Для использования ОСП на борту самолета устанавливают маркерный радиоприемник, один или два автоматических радиокомпаса (АРК), каждый из которых можно настроить на одну частоту (на ДПРМ или БПРМ). Обеспечивается автоматическая перестройка на другую частоту при пролете ПРС, ДПРМ и БПРМ устанавливают на расстояниях ~4 км и ~1 км от порога ВПП соответственно. Применяется также установка только одной ПРС («ОПРС»). Установленные совместно с ПРС МРМ, излучающие сигнал на частоте 75 МГц, предназначены для контроля высоты полета по известной дальности до маяка. Пролет МРМ экипаж фиксирует по звуковым сигналам опознавания, кодируемых азбукой Морзе. («Авиационные правила. Часть 139. Сертификация аэродромов. Том II. Сертификационные требования к аэродромам». Межгосударственный Авиационный комитет.1996. 84 с., Верещака А.И., Олянюк П.В. «Авиационное радиооборудование». Москва. «Транспорт», 1996.
В системе ОСП отсутствуют средства измерения дальности, поэтому схемы захода на посадку всегда предусматривают ступенчатое снижение. После выхода на конечный пункт маршрута (КПМ) на высоте порядка 900 м выполняется снижение к 3-му развороту, выполнению которого предшествует участок горизонтального полета, затем снижение в процессе и после третьего разворота. После 4-го разворота снова выполняется горизонтальный полет до точки входа в глиссаду (ТВГ), которую экипаж рассчитывает самостоятельно. Снижение от ТВГ выполняется с вертикальной скоростью, превышающей расчетную на 30-35%. Когда высота полета будет на 20-30 м больше установленной для пролета ДПРМ и если к этому времени ЛА не пролетело ДПРМ, необходимо установить двигателям режим работы, соответствующий горизонтальному полету, и перевести ЛА в горизонтальный полет, выдерживая высоту пролета ДПРМ. После пролета ДПРМ снижение выполняют с расчетной вертикальной скоростью по расчетной глиссаде до высоты принятия решения, к моменту достижения которой должно быть принято решение о посадке или уходе на второй круг. [Черный М.А., Кораблин В.И. «Воздушная навигация». Изд. 3. Москва. «Транспорт», 1983. 384 с (Изд. 4, 1991), стр. 376].
Расчетные высоты пролета ДПРМ, БПРМ и расчетная вертикальная скорость для снижения по установленной глиссаде в зависимости от путевой скорости полета публикуются в сборниках аэронавигационной информации.
Заход на посадку по ОСП выполняется на всех типах летательных аппаратов (ЛА) в ручном режиме управления. Выход на ПРС с использованием радиопеленгатора может выполняться пассивным и активным методами. Пассивный метод предусматривает выдерживание курсового угла радиостанции (КУР) равным нулю:
Пассивный метод наведения приводит к сносу самолета боковым ветром относительно первоначального направления. Выход на ПРС теоретически происходит против ветра, независимо от начального направления полета. На практике это не реализуется, поскольку требуется увеличивать крен вблизи ПРС до 70÷80° и более [«Самолетовождение». Под редакцией Соколова В.И. Военное издательство Министерства Обороны СССР. Москва. 1955], что сделать летчик не успевает. Активный метод предусматривает выдерживание КУР с учетом угла сноса (УС):

или
где МПР - магнитный пеленг радиостанции.
Формулы показывают, что с помощью радиопеленгатора выход на ПРС может выполняться без использования курсовой системы. Активный метод наведения обеспечивает полет по линии заданного пути (ЛЗП) и, в частности, по линии посадочного курса.
Для использования радиопеленгаторов на борту ЛА устанавливают индикаторы типа РМИ, с подвижной шкалой курса и стрелками АРК-1, настраиваемый на ДПРМ, и АРК-2, настраиваемый на БПРМ. Если обе стрелки радиокомпасов указывают один и тот же КУР, ЛА находится на предпосад очной прямой. До пролета ДПРМ положение предпосадочной прямой указывает стрелка АРК-1 относительно стрелки АРК-2. После пролета ДПРМ положение предпосадочной прямой указывает угол, образованный стрелками радиокомпасов. После пролета БПРМ положение предпосадочной прямой указывает стрелка АРК-2 относительно стрелки АРК-1. [Черный М.А., Кораблин В.И. «Воздушная навигация». Изд. 3. Москва. «Транспорт», 1983. 384 с (Изд. 4, 1991)].
Системой ОСП оборудованы практически все аэродромы РФ, она применяется и за рубежом. ПРС используется в качестве резервного средства связи с самолетом, оборудованным АРК. ОСП позволяет выполнить выход на аэродром посадки с любого направления, построить маневр выхода на посадочный курс и зайти на посадку. С использованием ОСП выполняется вход в зону действия КГС. Далее, при заходе на посадку по ПСП, применяется правило: если стрелка АРК и планка положения отклонены в разные стороны - самолет приближается к посадочной прямой, если они отклонены в одну и ту же сторону удаляется от нее [Микоян С.А., Корбут А. Г. Заход на посадку по приборам, М.: Воениздат, 1979. - 71 с, ил. 15 к. Стр. 27].
Первым недостатком ОСП является отсутствие приборного наведения по глиссаде.
Вторым недостатком ОСП является невысокая точность определения бокового уклонения от оси ВПП, что связано, в том числе, с большим удалением БПРМ (~1 км) от ВПП. Ближе к ВПП расположить БПРМ нельзя ввиду больших размеров антенн средневолнового диапазона, которые являются опасными препятствиями для заходящего на посадку летательного аппарата (ЛА).
Сущность изобретения
Задачей изобретений является обеспечение посадки ЛА на необорудованных аэродромах или вертолетных площадках, обеспечение резервирования курсо-глиссадной системы и управления полетами в районе аэродрома.
Предлагаемые изобретения направлены на достижение технического результата, заключающегося в повышении безопасности посадки за счет обеспечении дополнительной возможности построения приборной глиссады снижения на борту ЛА, обеспечения наведения при заходе на посадку по резервным системам до меньшей дальности.
Для получения указанного технического результата в предлагаемом способе захода на посадку ЛА, включающем измерение курсовых углов радиостанций, которые используют для наведения по курсу пассивным или активным методом, измерение высоты полета, снижение к ВПП с расчетной вертикальной скоростью, на борту ЛА формируют глиссаду снижения по дальности, определяемой бортовым комплектом системы предупреждения столкновений (СПС), радиотехнически связанным с наземным комплектом СПС, код индивидуального опознавания которого опознается на борту ЛА, как предназначенный для посадки, и по высоте, получаемой от бортовых высотомеров, и индицируемой на высотомерах в виде метки заданной высоты. Экипаж выдерживает заданную глиссаду снижения, устраняя рассогласование между заданной и текущей высотами полета посредством метки заданной высоты. При заходе на посадку в зону действия курсо-глиссадной системы (КГС), экипаж контролирует выдерживание заданной глиссады снижения по рассогласованию между показанными стрелкой текущей высоты и меткой заданной высоты. Если КГС не работает, или на аэродроме нет КГС, то глиссаду снижения на борту ЛА формируют в виде сигнала рассогласования между заданным и текущим углами наклона глиссады εГ 0 и указанный сигнал рассогласования поступает в бортовую систему автоматического управления (САУ).
Кроме того, на рабочем месте диспетчера, по данным о дальности и высоте полета ЛА, находящихся в зоне действия системы посадки, получаемой от наземного комплекта СПС, формируют глиссаду снижения в виде заданной высоты и в виде разницы между заданной и текущей высотой полета ЛА (и индицируют ее на индикаторе), по которой диспетчер определяет вертикальное отклонение от глиссады, а по данным о КУР и дальности, получаемым от наземного комплекта СПС, и по данным о КУР, получаемым от наземного УКВ-радиопеленгатора, индицируемым на индикаторе, диспетчер определяет боковое уклонение, дает команды управления голосом по радио, определяя по индикатору рассогласование между заданной и текущей приборной траекторией полета.
Более того, глиссаду формируют с учетом температурной методической поправки, вычисляемой по приближенной формуле:

где t0 0 - температура у земной поверхности в градусах Цельсия;
Нист - истинная высота полета [Белкин A.M., Миронов Н.Ф., Рублев Ю.И., Сарайский Ю.Н. «Воздушная навигация: Справочник». Москва. «Транспорт», 1988. 303 с., стр. 242].
Известна не истинная, а приборная высота (высота полета по прибору) Нпр, поэтому истинную высоту Нист вычисляют методом последовательных приближений.
Первое приближение:
- определяют температурную поправку ΔHt1, считая, что текущая высота полета по прибору Нпр равна Нист в формуле 1. Далее определяют истинную высоту в первом приближении по формуле:

- Второе приближение:
- определяют температурную поправку ΔНt2ист для первого приближенного значения высоты. Далее определяют истинную высоту во втором приближении по формуле 3 и т.д. На практике достаточно 3-х приближений.
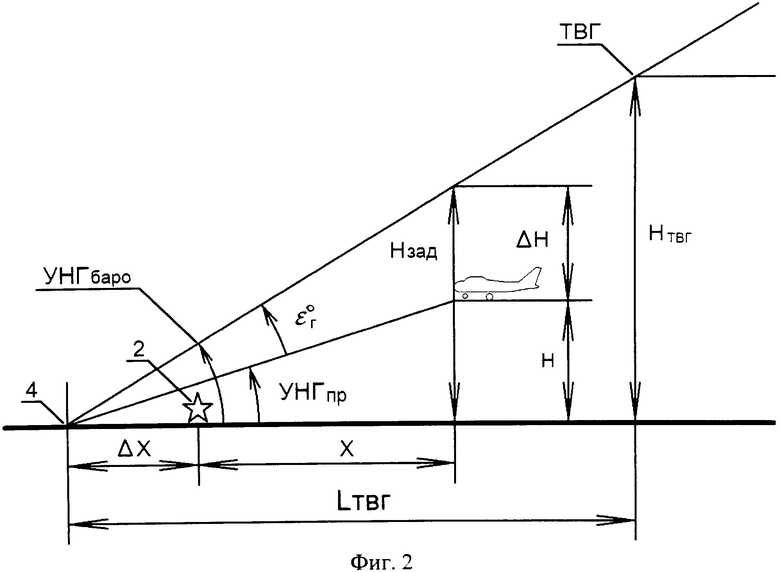
Температурную методическую поправку учитывают в расчетах заданного угла наклона глиссады и заданной высоты полета, что особенно важно для предупреждения столкновения с землей при отрицательных температурах наружного воздуха. Для этого определяют приборную (с учетом температурной поправки) высоту в точке входа в глиссаду (ТВГ) по формуле:

НистТВГ - расчетная высота входа в глиссаду (публикуется в сборниках аэронавигационной информации).
Далее, если удаление точки входа в глиссаду (ТВГ) до линии пересечения плоскости глиссады с плоской землей известно с недостаточной точностью, то его определяют по известной высоте входа в заданную глиссаду и известному углу наклона глиссады (УНТ) по формуле:

Затем определяют расчетный угол наклона «барометрической глиссады» УНГбаро для снижения по глиссаде с использованием барометрического высотомера:

Горизонтальную дальность до маяка (наземного комплекта СПС) определяют по формуле:

где
D - наклонная дальность до маяка (наземного комплекта СПС);
Нист - истинная высота полета.
Заданную, в зависимости от дальности, высоту полета по «барометрической» глиссаде определяют по формуле:

где
ΔХ - расстояние от места установки наземного комплекта СПС.
Полученное значение Нзад выдается экипажу на индикацию (высотомер) в виде специальной метки заданной высоты.
Фактический («Приборный») угол наклона глиссады (УНГпр), определяют по формуле:

где Х - горизонтальная дальность до маяка, вычисленная по формуле 6;
Нпр - высота полета по прибору.
По разнице между текущим и заданным углами наклона глиссады формируют сигнал отклонения от заданной глиссады снижения εГ по формуле:

Данный сигнал аналогичен сигналам, применяемым в современных курсо-глиссадных системах и поэтому может быть использован в существующем самолетном оборудовании обычным образом.
При таком способе расчета «барометрическая» глиссада совпадает с глиссадой, построенной с использованием курсо-глиссадных систем (КГС).
Для расчетов используют вычислитель посадки, в качестве которого может быть использован вычислитель системы самолетовождения - ВСС, или вычислитель СПС, в который вводят значения угла наклона и высоты входа в глиссаду (известно из электронной базы данных), температуры воздуха у земли.
По разнице между заданной и приборной высотам формируют сигнал заданной вертикальной скорости, определяемый, например, по формуле:

где
К - коэффициент усиления;
ΔН=Нпр-Нзад;
W - путевая скорость (может использоваться истинная или приборная скорость).
Заданную вертикальную скорость индицируют на вариометре в виде специальной метки.
Для достижения названного технического результата в предлагаемой системе посадки летательного аппарата (ЛА) с применением системы предупреждения столкновений (СПС), включающей в себя бортовое оборудование: ультракоротковолновые (УКВ) - радиостанции, высотомеры, и наземные УКВ-радиостанции, дополнительно перед торцом взлетно-посадочной полосы (ВПП) установлены радиопеленгатор, антенна командной УКВ радиостанции, комплект системы предупреждения столкновений (СПС), код индивидуального опознавания которого опознается на борту ЛА, как предназначенный для посадки. У диспетчера установлен вычислитель заданной высоты и отклонения от заданной высоты, индикатор, связанный своими входами с выходами наземного комплекта СПС по каналам высоты, азимута, дальности. Индикатор диспетчера связан с выходами вычислителя заданной высоты и отклонения от заданной высоты по ΔН и Нзад, а также с выходом радиопеленгатора. Кроме того, указанный вычислитель связан своими входами с выходами наземного комплекта СПС по каналам определения дальности и высоты до ЛА, с выходами задатчиков температуры и давления воздуха у земли. В комплект СПС, установленный на ЛА, радиотехнически связанный с аппаратурой наземного комплекта СПС, дополнительно включены дешифратор (блок опознавания кода посадки), связанный выходом с его входом блок задатчика кода посадки, вычислитель заданной высоты и вычислитель отклонения от заданной глиссады снижения 

Высота антенной системы определяется длиной волны, на которой работает предлагаемая посадочная система, поэтому нужно радиотехническое средство, работающее на меньшей длине волны, чем ОСП. При этом желательно не разрабатывать новое, а доработать уже существующее оборудование, в качестве которого и выбрана СПС. Например, бортовая система предупреждения столкновений типа SECANT (США) работает в диапазоне частот 1592,5-1622,5 МГц (длина волны λ≈18.8÷18.5 см) с передачей запросных и ответных сигналов на 24 частотах указанного диапазона. При длительном сопровождении следящим устройством точность определения расстояния составляет ~7,5 м, а точность измерения скорости сближения - до величины среднеквадратичной ошибки, равной 20 км/ч. В современной аппаратуре СПС точность измерения пеленга составляет 5°-6° [Бычков С.М., Пахолков Г.А., Яковлев В.Н. «Радиотехнические системы предупреждения столкновения самолетов». Москва, «Советское радио», 1977. 272 с], что хуже точностей определения пеленга бортовыми УКВ-пеленгаторами (АРК-У2), имеющими погрешность порядка 3°. [Верещака А.И., Олянюк П.В. «Авиационное радиооборудование». Москва. «Транспорт», 1996. 343 с.
Кроме того, предлагаемая система посадки обеспечивает резервирование курсо-глиссадной системы и управления полетами в районеаэродрома, «барометрическая» глиссада совпадает с глиссадой, построенной с использованием курсо-глиссадных систем (КГС).
Предлагаемые изобретения иллюстрируются чертежами, представленным на фиг. 1-3.
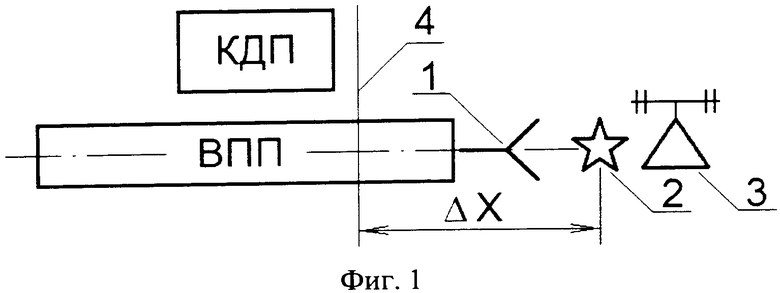
На фиг. 1 показана схема расположения радиотехнических средств посадки в предлагаемой посадочной системе, где
1 - антенна УКВ-радиостанции;
2 - наземный комплект СПС, код индивидуального опознавания которого опознается на борту ЛА, как предназначенный для посадки который опознается на борту ЛА, как предназначенный для посадки;
3 - наземный УКВ-радиопеленгатор;
4 - линия пересечения плоскости глиссады с землей.
На фиг. 2 показана расчетная схема определения заданной высоты и отклонения от заданной глиссады снижения.
На фиг. 3 показана структурная схема системы посадки летательного аппарата с применением СПС, где
1 - антенна УКВ-радиостанции;
2 - наземный комплект СПС, код индивидуального опознавания которого опознается на борту ЛА, как предназначенный для посадки;
3, 14 - УКВ-радиопеленгаторы;
5 - бортовой комплект СПС;
6 - задатчик кода посадки;
7 - дешифратор;
8 - вычислитель отклонения от заданной глиссады;
9 - задатчик температуры воздуха у земли;
10 - канал глиссады системы автоматического управления (САУ);
11 - вычислитель заданной высоты;
12 - высотомер,
13, 19 - индикаторы;
15, 20 - УКВ-радиостанции;
16 - вычислитель заданной высоты и отклонения от глиссады по высоте;
17 - задатчик температуры воздуха у земли;
18 - задатчик давления воздуха у торца ВПП.
Предлагаемый способ осуществляют в следующей последовательности.
В способе захода на посадку летательного аппарата выполняют горизонтальный полет до точки входа в глиссаду (ТВГ), после чего начинают снижение по глиссаде (фиг. 2). Дальность, получают от наземного, установленного перед ВПП, комплекта системы предупреждения столкновений (СПС) (2), код индивидуального опознавания которого опознается на борту ЛА, как предназначенный для посадки, а в бортовом комплекте СПС(5) формируют по признаку (коду) посадки глиссаду снижения по дальности, получаемой от СПС обычным образом, и высоте, получаемой от бортовых высотомеров (12). Формируют глиссаду снижения на борту летательного аппарата (ЛА) в виде метки заданной высоты, с учетом температурной методической поправки, на высотомерах (12). Экипаж выдерживает заданную глиссаду снижения, устраняя рассогласование между заданной и текущей приборной высотами полета посредством метки заданной высоты Нзад., и (или) формируют глиссаду снижения в виде сигнала рассогласования
Глиссаду формируют с учетом температурной методической поправки, вычисляемой по приближенной формуле:
где

Нист - истинная высота полета [Белкин A.M., Миронов Н.Ф., Рублев Ю.И., Сарайский Ю.Н. «Воздушная навигация: Справочник». Москва. «Транспорт», 1988. 303 с., стр. 242].
Известна не истинная, а приборная высота (высота полета по прибору) Нпр, поэтому истинную высоту Нист вычисляют методом последовательных приближений, фиг. 2.
Первое приближение:
- определяют температурную поправку ΔHt1, считая, что текущая высота полета по прибору Нпр (12) равна Нист в формуле 1. Далее определяют истинную высоту в первом приближении по формуле:

- Второе приближение:
- определяют температурную поправку ΔHt2иcт для первого приближенного значения высоты. Далее определяют истинную высоту во втором приближении по формуле 3, и т.д. На практике достаточно 3-х приближений.
Температурную методическую поправку учитывают в расчетах заданного угла наклона глиссады и заданной высоты полета, что особенно важно для предупреждения столкновения с землей при отрицательных температурах наружного воздуха. Для этого определяют приборную (с учетом температурной поправки) высоту в точке входа в глиссаду (ТВГ) по формуле:

НистТВГ - расчетная высота входа в глиссаду (публикуется в сборниках аэронавигационной информации).
Далее, если удаление точки входа в глиссаду (ТВГ) до линии пересечения плоскости (4) глиссады с плоской землей известно с недостаточной точностью, то его определяют по известной высоте входа в заданную глиссаду и известному углу наклона глиссады (УНТ) по формуле:

Затем определяют расчетный угол наклона «барометрической глиссады» УНГбаро для снижения по глиссаде с использованием барометрического высотомера (12):

Горизонтальную дальность до маяка (наземного комплекта СПС) определяют по формуле:

где
D - наклонная дальность до маяка (наземного комплекта СПС (2));
Нист - истинная высота полета.
Заданную, в зависимости от дальности, высоту полета по «барометрической» глиссаде определяют по формуле:

где
ΔХ - расстояние от места установки наземного комплекта СПС.
Полученное значение Нзад выдается экипажу на индикацию (высотомер) в виде специальной метки заданной высоты.
Фактический («Приборный») угол наклона глиссады (УНГпр), определяют по формуле:

где Х - горизонтальная дальность до маяка, вычисленная по формуле 6;
Нпр - высота полета по прибору.
По разнице между текущим и заданным углами наклона глиссады формируют сигнал отклонения от заданной глиссады снижения ЕГ по формуле:

Данный сигнал аналогичен сигналам, применяемым в современных курсо-глиссадных системах и поэтому может быть использован в существующем самолетном оборудовании обычным образом.
При таком способе расчета «барометрическая» глиссада совпадает с глиссадой, построенной с использованием курсо-глиссадных систем (КГС).
Для расчетов используют вычислитель посадки на ЛА, в качестве которого может быть использован вычислитель системы самолетовождения - ВСС, или вычислитель отклонения от заданной глиссады (8), вычислитель заданной высоты (11) СПС (5), в который вводят значения угла наклона и высоты входа в глиссаду (известно из электронной базы данных), температуры воздуха у земли (9).
По разнице между заданной (11) и приборной высотам (12) формируют сигнал заданной вертикальной скорости, определяемый, например, по формуле:

где
К - коэффициент усиления;
ΔН=Нпр-Нзад;
W - путевая скорость (может использоваться истинная или приборная скорость).
Заданную вертикальную скорость индицируют на вариометре в виде специальной метки.
Наведение по глиссаде осуществляется до пролета маяка (наземного комплекта СПС (2)).
Например, высота полета по прибору Нпр=690 м, температура у земли - -30°С. Тогда первое приближение:
Второе приближение:
Третье приближение:

Таким образом, если высота полета по прибору Нпр=690 м, то истинная высота Нист=600 м, что должен учитывать экипаж перед снижением по глиссаде и при полете по глиссаде.
Например, высота входа в глиссаду НистТВГ=600 м, температура у земли -30°С. Тогда НпрТВГ=690 м.
Далее, если удаление точки входа в глиссаду (ТВГ) до линии пересечения плоскости глиссады с плоской землей известно с недостаточной точностью, то его определяют по известной высоте входа в заданную глиссаду и известному углу наклона глиссады (УНТ) по формуле:

Например, УНТ=3°, высота входа в глиссаду НистТВГ=600 м, тогда расчетное удаление ТВГ LТВГ≈11449 м. Затем определяют расчетный угол наклона «барометрической глиссады» УНГбаро для снижения по глиссаде с использованием барометрического высотомера:

Для данного примера получим УНГбаро≈3,44°.
Пример.
При выполнении захода на посадку ЛА на аэродром, оборудованный данной посадочной системой, для учета температурной методической погрешности, экипаж заранее вводит в бортовой вычислитель посадки (8, 11) значение температуры воздуха у земли вручную, при помощи специального задатчика, или это значение может быть передано на борт ЛА по линии передачи данных, или может содержаться в сигнале наземного комплекта СПС (2), предназначенного для посадки, вместо сигнала собственной высоты, обычно использующегося для предупреждения столкновений самолетов в воздухе. В окне Колсманна высотомера (12) экипаж устанавливает давление воздуха на уровне ВПП (QFE - Q-code Field Elevation). Это нужно для построения глиссады снижения, а также для того, чтобы показания барометрических высотомеров и радиовысотомеров (12) были сопоставимы, были равны нулю на посадке и пробеге по ВПП. На своем задатчике кода посадки (6) экипаж устанавливает код, соответствующий выбранной ВПП, не меняя кода индивидуального опознавания. Например, при посадке на ВПП 25 левую, устанавливается код 0251, где 0 - признак посадки, 25 - магнитный курс посадки, округленный до десятков градусов, 1 - означает, что эта ВПП - левая. При посадке с противоположным курсом код посадки будет: 0079, где 0 -признак посадки, 07 - магнитный курс посадки, округленный до десятков градусов, 9 - означает, что эта ВПП - правая.
Диспетчер также вводит в свой вычислитель посадки (16) значение температуры воздуха у земли вручную, при помощи специального задатчика (17), или это значение может вводиться автоматически, от наземного датчика температуры. Дополнительный задатчик кода посадки для наземного комплекта СПС не требуется. Комплект СПС, предназначенный для посадки и расположенный у ВПП, настраивается на код индивидуального опознавания, соответствующий обозначению ВПП, у которой он установлен, например, 0251, для чего используется стандартный блок установки кодов опознавания. Данный комплект СПС (предлагаемая посадочная система) может иметь зону действия, ограниченную высотой, дальностью, курсовыми углами (пеленгами) заходящих на посадку ЛА.
Например, зоной действия может быть пространство, ограниченное пеленгами (курсовыми углами) ±30° от осевой линии ВПП, высотой 1200 м, дальностью 40 км.
Диспетчер может наблюдать на своем индикаторе(19) отметки от нескольких ЛА, заходящих на посадку. Обычно у каждой метки ЛА, в специальном прямоугольнике, «формуляре», индицируется код индивидуального опознавания, высота ЛА, и некоторые другие данные. При использовании данной системы формуляр дополнен сведениями о расчетной высоте полета и о разнице между заданной и текущей высотами полета. Эти сведения диспетчер сообщает экипажу по радио. Экипаж сравнивает эти данные с показаниями метки заданной высоты на своем высотомере (12). При снижении по глиссаде экипаж сообщает свою высоту полета. Диспетчер при этом сравнивает его сообщение с имеющимися данными на индикаторе (19), с расчетной высотой полета. Возможность сравнения данных, полученных от разных источников, увеличивает надежность системы.
При выходе на связь экипажа ЛА диспетчер наблюдает совпадение направлений (курсовых углов), полученных от УКВ-радиопеленгатора (3) (наземные радиопеленгаторы имеют погрешность порядка 1,5-1°) и СПС (погрешность порядка 5-6°) на своем индикаторе. Диспетчер наблюдает все ЛА, находящиеся в зоне действия наземного комплекта СПС (2), с информацией о высоте и другими данными, но те ЛА, которые находятся вне зоны действия предлагаемой системы, диспетчер наблюдает в виде обычных отметок, без информации о расчетной высоте полета. После входа ЛА в зону действия предлагаемой системы посадки диспетчер наблюдает высоту ЛА, получаемую от каждого, находящегося в зоне действия ЛА, посредством наземного комплекта СПС (2), заданную высоту, и разность между заданной и текущей приборной высотой АН, получаемую от вычислителя, о чем информирует экипаж (передает команды управления) по радио.
Если в зону действия системы входит ЛА, не оборудованный СПС, но оборудованный ответчиком типа СО-69, СО-72 [oleg-tulin.narod.ru, самолетный ответчиксо-69, blackterror.org>zevdio/Самолеты…ответчик, Википедия: ru.wikipedia.org, Самолетный радиолокационный ответчик], то глиссада снижения предлагаемой посадочной системой формируется только у диспетчера.
После входа ЛА в зону действия наземного маяка (комплекта СПС), экипаж обнаруживает маяк по специальной метке, а при выходе на связь диспетчера, наблюдает совпадение направлений (курсовых углов), полученных от радиопеленгатора и СПС (2) на своем индикаторе. Дополнительных ограничений по зоне действия для ЛА не требуется.
Выход на посадочный курс экипаж ЛА выполняет обычными способами, предусмотренными для ОСП и РСП. После выхода на посадочную прямую выполняется горизонтальный полет до входа в глиссаду, который определяется по совпадению текущей приборной высоты с заданной высотой, после чего экипаж приступает к снижению по глиссаде, наблюдая на своих приборах и устраняя рассогласование между заданной и приборной высотами полета путем выдерживания заданной вертикальной скорости, которая индицируется на вариометре. Если экипаж или диспетчер не учтут температурную методическую погрешность, то это будет обнаружено по несовпадению бортовой и наземной глиссад снижения, или, при наличии РСП, по несовпадению барометрической глиссады с глиссадой РСП.
При использовании предлагаемой системы совместно с ОСП, вместо второго АРК используют УКВ-радиопеленгатор (типа АРК-У2), а при совместном использовании с КГС, вместо АРК используют АРК-У2 известным способом: при заходе на посадку по ПСП применяется правило: если стрелка АРК и планка положения отклонены в разные стороны - самолет приближается к посадочной прямой, если они отклонены в одну и ту же сторону - удаляется от нее. При этом снижение по глиссаде выполняют, используя КГС, как более точную систему, и контролируют глиссаду снижения путем сравнения текущей высоты с заданной по высотомеру.
Предлагаемая система посадки летательного аппарата с применением системы предупреждения столкновений (СПС) содержит (фиг. 1) наземные, установленные перед торцом ВПП, УКВ-радиостанции (20), УКВ-радиопеленгатор (13), связанный своим выходом с индикатором диспетчера (19), антенну командной УКВ радиостанции (1), комплект системы предупреждения столкновений (СПС) (2), код индивидуального опознавания которого опознается на борту ЛА, как предназначенный для посадки, связанный своими выходами с индикатором диспетчера (19), с вычислителем заданной высоты и отклонения от заданной высоты (16). Индикатор диспетчера (19) связан своими входами с выходами наземного комплекта СПС (2), вычислителем заданной высоты и отклонения глиссады по высоте (16), а также с УКВ-радиопеленгатором (3). Указанный вычислитель заданной высоты и отклонения глиссады по высоте (16) связан своими входами с наземным комплектом СПС (2), с задатчиками температуры (17) и давления воздуха у торца ВПП (18), а выходами указанный вычислитель (16) связан с индикатором (19), установленным у диспетчера на КДП (фиг. 1). В комплект СПС (5), установленный на ЛА (фиг. 3) дополнительно включены дешифратор (блок опознавания кода посадки) (7), связанный входом с его выходом блок задатчика кода посадки (6), высотомер, датчик давления уровня отсчета, входящий в состав высотомера (12), и датчик температуры воздуха у земли (9), выходами соединенные с вычислителями заданной высоты (11) и отклонения от заданной глиссады снижения
Система посадки летательного аппарата с применением системы предупреждения столкновений (СПС) работает следующим образом.
На земле, перед торцом ВПП, устанавливают антенну командной УКВ радиостанции (1), УКВ-радиопеленгатор (3), комплект системы предупреждения столкновений (СПС) (2). В ответном (запросном) сигнале наземного комплекта СПС (2) передается код индивидуального опознавания, который опознается на борту ЛА, как предназначенный для посадки на определенную ВПП. На рабочем месте диспетчера устанавливают индикатор (19), УКВ-радиостанцию (20), вычислитель заданной высоты и отклонения от заданной высоты (16), в который посредством задатчиков (17) и (18) вводят значения температуры и давления воздуха у земли. Наземный комплект СПС (2), взаимодействуя с находящимися в его зоне действия ЛА обычным образом, определяет курсовые углы, дальности и высоты ЛА, которые выдаются на индикатор диспетчера (19), но сигналы расхождения не вырабатываются. Вычислитель (16) определяет значения заданной высоты и отклонения от заданной высоты для каждого ЛА, находящегося в зоне действия системы, и выдает эти данные на индикатор (19). Диспетчер определяет дальность и боковое уклонение ЛА от линии заданного пути по положению метки ЛА на индикаторе (19), а заданную высоту и отклонение ЛА по высоте - по числовым значениям, которыми дополнен обычный формуляр, расположенный рядом с каждой меткой ЛА. При необходимости диспетчер информирует экипаж об отклонении, или дает команду по радио, как в существующих РСП. При выходе диспетчера в эфир экипаж на борту ЛА определяет направление на источник излучения (антенну радиостанции, уставленную у торца ВПП - (1)) посредством установленного на борту УКВ-радиопеленгатора (14). В ответ на информацию (команду) диспетчера экипаж отвечает высотой (сообщает высоту по своему прибору). При выходе экипажа в эфир диспетчер посредством УКВ-радиопеленгатора (3) определяет направление на источник излучения - ЛА, вышедший на связь. Диспетчер контролирует правильность выполнения захода на посадку и подает необходимые команды так же, как и при использовании РСП. Для увеличения точности определения уклонения ЛА от осевой линии перед ВПП устанавливают УКВ-радиопеленгатор (3), который обычно устанавливают в стороне от осевой линии ВПП.
Самолетный комплект СПС (5) взаимодействует с другими самолетными комплектами прежним, стандартным, способом, т.е. обменивается с другими комплектами СПС запросными и ответными сигналами, на основе обработки и анализа которых в вычислителях СПС вырабатываются согласованные команды на выполнение вертикального маневра расхождения типа "RA" [Doc 9863AN/461 «Руководство по бортовой системе предупреждения столкновений (БСПС)». Утверждено Генеральным секретарем и опубликовано с его санкции. Издание первое - 2006. Международная организация гражданской авиации. Бычков С.М., Пахолков Г.А., Яковлев В.Н. «Радиотехнические системы предупреждения столкновения самолетов». Москва, «Советское радио», 1977. 272 с].
Взаимодействующий с наземным комплектом (2) бортовой комплект СПС (5) дополнен дешифратором (7), который сравнивает принятый от каждого ЛА код с кодом, установленном на задатчике кода посадки (6). В случае совпадения указанных кодов сигналы дальности до наземного комплекта СПС (2) поступают на вычислитель заданной высоты (11) и на вычислитель отклонения от заданной глиссады (8). На входы указанных вычислителей поступают также сигналы от задатчика температуры воздуха у земли (17), высоты от высотомера (12), давления воздуха у торца ВПП (QFE), которое экипаж выставляет в окне Колсманна высотомера (12). Дополнительно введенная метка заданной высоты высотомера (12) отклоняется по сигналам, получаемым от вычислителя заданной высоты (11). Экипаж ЛА судит об отклонении от заданной высоты путем сравнения положений стрелки высотомера и метки заданной высоты и выдерживает заданную глиссаду снижения, устраняя рассогласование между заданной и текущей высотой полета.
Предлагаемый комплект системы СПС, установленный на борту ЛА, формирует на своем индикаторе (13) специальную метку, соответствующую относительным координатам (курсовому углу и дальности) наземной станции (наземного комплекта СПС), отличающуюся от меток ЛА и дополненную информацией о номере ВПП (курсе посадки), на которую производится заход. Эта информация вводится вместо кода индивидуального опознавания другого ЛА. Настройка на нужный наземный комплект СПС производится установкой специального кода на дополнительно введенном задатчике кода посадки (6), а существующий задатчик кода опознавания используется как в стандартной системе СПС - для обозначения своего ЛА. Дешифратор (7) сравнивает код, принятый от другого комплекта СПС, с кодом, установленным экипажем посредством задатчика (6), и при совпадении указанных кодов, посылает в вычислитель отклонения от глиссады (8) и в вычислитель заданной высоты (11) сигнал дальности до заданного (наземного) комплекта СПС. В указанные вычислители вводятся также значения температуры воздуха у земли, высоты и давления воздуха на уровне отсчета высоты (QFE). Заданную высоту, полученную от вычислителя (11), индицируют на высотомере (12) в виде специальной метки. Экипаж наблюдает на своих высотомерах и устраняет рассогласование между заданной и текущей приборной высотами полета путем выдерживания заданной вертикальной скорости, которая индицируется на вариометре. Вычислитель отклонения от заданной глиссады снижения (8) выдает в бортовую систему автоматического управления (САУ) сигнал отклонения от заданной глиссады снижения. Этот сигнал может использоваться для комплексной обработки вместе с другими средствами построения глиссады или вместо их. САУ выдает сигнал управления по высоте на рулевые машинки автопилота и на индикаторы экипажа в виде директорного сигнала. При отсутствии других средств построения глиссады сигнал отклонения от глиссады поступает от вычислителя (8) на индикаторы в кабине экипажа (13). Снижение по глиссаде экипаж может выполнять в ручном, директорном и автоматическом режимах. Может быть задан переменный, в зависимости от дальности, угол наклона глиссады.
При заходе на посадку с использованием только предлагаемой системы экипаж управляет ЛА по курсу таким же образом, как и при заходе на посадку с использованием отдельной приводной радиостанции (ОПРС), только вместо ОПРС используется СПС и бортовой УКВ-радиопеленгатор (14) типа АРК-У2. АРК-У2, обычно используемый на поисково-спасательных вертолетах и самолетах, может иметь как отдельный индикатор, так и входить в состав пилотажно-навигационного комплекса и индицировать курсовой угол УКВ-радиостанции (КУР) на многофункциональных бортовых индикаторах (13). При выходе на связь диспетчера экипаж наблюдает совпадение направлений (курсовых углов), полученных от УКВ-радиопеленгатора (14) и СПС на своем индикаторе (13). При применении данной системы совместно с ОСП экипаж имеет возможность использовать АРК и УКВ-радиопеленгатор (АРК-У2) при полете между ПРС. Информация о КУР от СПС используется экипажем ЛА для контроля правильности выполнения захода (для исключения грубых ошибок самолетовождения).
Таким образом, предлагаемая посадочная система может работать как совместно (в комплексе) с существующими посадочными системами, использоваться вместо системы РСП, как дублирующая система, что повышает безопасность посадки, и как отдельная система для управления полетами на необорудованных аэродромах и вертолетных площадках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| АВТОМАТИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА ПЕРЕДАЧИ МЕТЕОРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК АЭРОДРОМА И ВВОДА ИХ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2012 |
|
RU2519622C2 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| Способ определения геометрической высоты полета при заходе летательного аппарата на посадку | 2016 |
|
RU2620590C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
Изобретения относятся к области авиации и могут быть использованы для обеспечения посадки летательного аппарата (ЛА). Достигаемый технический результат - повышение безопасности посадки. Указанный результат достигается тем, что способ захода на посадку ЛА включает измерение курсовых углов ультракоротковолновых радиостанций (КУР), измерение высоты полета, снижение к взлетно-посадочной полосе с расчетной вертикальной скоростью, при этом на борту ЛА формируют глиссаду снижения по дальности, получаемой от комплекта системы предупреждения столкновений (СПС), код индивидуального опознавания которого опознается на борту ЛА как предназначенный для посадки, и по высоте, получаемой от бортовых высотомеров, и индицируют ее на высотомерах в виде метки заданной высоты, причем экипаж выдерживает заданную глиссаду снижения, устраняя рассогласование между заданной и текущей высотой полета посредством метки заданной высоты, и (или) формируют глиссаду снижения по сигналу рассогласования между заданным и текущим углами наклона глиссады, при этом указанный сигнал рассогласования поступает в бортовую систему автоматического управления (САУ); на рабочем месте диспетчера, по данным о дальности и высоте полета, получаемым от наземного комплекта СПС, формируют глиссаду снижения в виде заданной высоты и в виде разницы между заданной и текущей высотой ЛА (и индицируют ее на индикаторе), по которой диспетчер определяет вертикальное отклонение от глиссады, а по данным о КУР и дальности, получаемым от наземного комплекта СПС, и по данным о КУР, получаемым от наземного УКВ-радиопеленгатора и индицируемым на индикаторе, диспетчер определяет боковое уклонение, дает команды управления голосом по радио, определяя по индикатору рассогласование между заданной и текущей траекторией полета. Система посадки летательного аппарата с применением системы предупреждения столкновений (СПС) включает в себя установленные перед торцом ВПП УКВ-радиостанции, УКВ-радиопеленгатор, антенну командной УКВ-радиостанции, комплект системы предупреждения столкновений (СПС), код индивидуального опознавания которого опознается на борту ЛА как предназначенный для посадки, вычислитель заданной высоты и отклонения от заданной высоты, индикатор, связанный своими входами с выходами наземного комплекта СПС по каналам высоты, азимута, дальности, с выходами вычислителя заданной высоты и отклонения от заданной высоты, а также с выходом УКВ-радиопеленгатора, кроме того, указанный вычислитель связан своими входами с выходами наземного комплекта СПС по каналам дальности и измеренной высоты до ЛА, с выходами задатчиков температуры и давления воздуха у земли, при этом на борту ЛА установлены бортовая УКВ-радиостанция, высотомеры, в комплект СПС, установленный на ЛА, радиотехнически связанный с аппаратурой наземного комплекта СПС, дополнительно включены дешифратор (блок опознавания кода посадки), блок задатчика кода посадки, два вычислителя заданной высоты и отклонения от заданной глиссады снижения, высотомер, датчик температуры воздуха у земли. 2 н. и 2 з.п. ф-лы, 3 ил.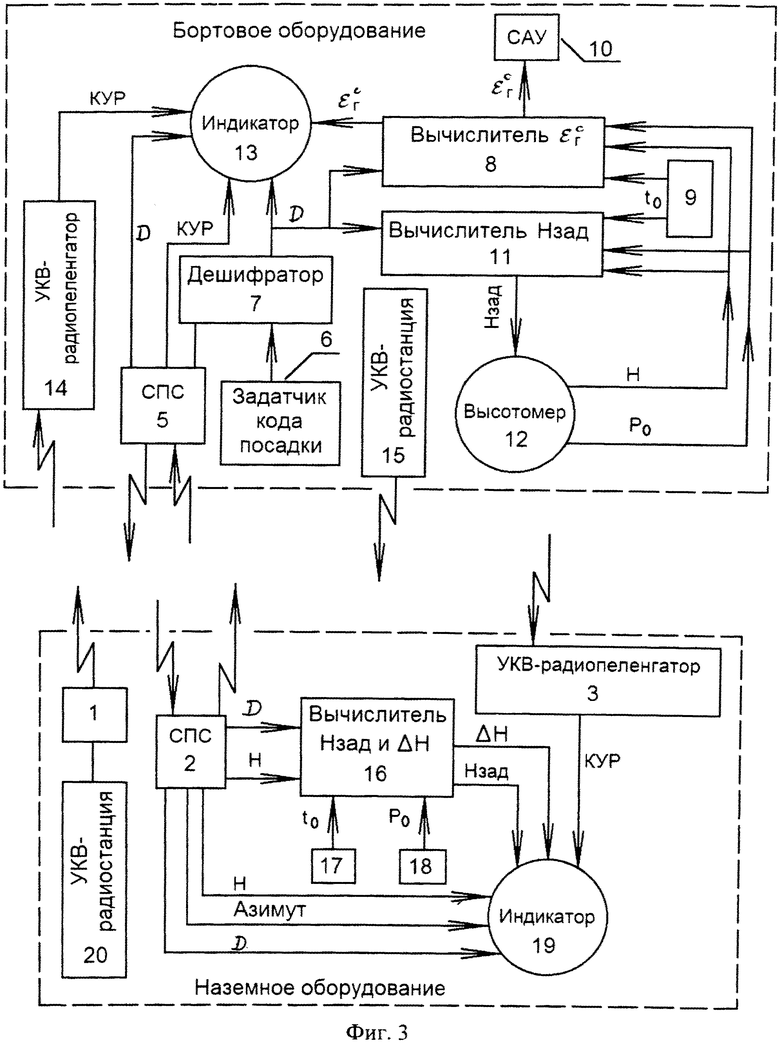
1. Способ захода на посадку летательного аппарата (ЛА), включающий измерение курсовых углов радиостанций (КУР), которые используют для наведения по курсу пассивным или активным методом, измерение высоты полета, снижение к взлетно-посадочной полосе (ВПП) с расчетной вертикальной скоростью, отличающийся тем, что на борту ЛА формируют глиссаду снижения по дальности, определяемой бортовым комплектом системы предупреждения столкновений (СПС), радиотехнически связанным с наземным комплектом СПС, код индивидуального опознавания которого опознается на борту ЛА, и по высоте с учетом температурной методической поправки, получаемой от бортовых высотомеров, формируют и индицируют глиссаду снижения на борту летательного аппарата (ЛА) в виде метки заданной высоты, а экипаж выдерживает заданную глиссаду снижения, устраняя рассогласование между заданной и текущей высотой полета посредством метки заданной высоты Нзад, и(или) формируют глиссаду снижения по сигналу рассогласования между заданным и текущим углами наклона глиссады 

2. Способ захода на посадку летательного аппарата по п. 1, отличающийся тем, что глиссаду формируют с учетом температурной методической поправки, которую вычисляют по приближенной формуле:

где
 - температура у земной поверхности в градусах Цельсия;
- температура у земной поверхности в градусах Цельсия;
Нист - истинная высота полета, которую вычисляют методом последовательных приближений:
- первое приближение:
определяют температурную поправку ΔHt1, считая, что текущая высота полета по прибору Нпр равна Нист в формуле 1, далее определяют истинную высоту в первом приближении по формуле:

- второе приближение:
определяют температурную поправку ΔHt2 для первого приближенного значения высоты, далее определяют истинную высоту во втором приближении по формуле 3 и т.д., после чего определяют приборную (с учетом температурной поправки) высоту в точке входа в глиссаду (ТВГ) по формуле:

где
НистТВГ - расчетная высота входа в глиссаду;
далее определяют удаление точки входа в глиссаду (ТВГ) до линии пересечения плоскости глиссады с землей по формуле:
 , где
, где
УНГ - угол наклона глиссады;
затем определяют расчетный угол наклона «барометрической глиссады» (УНГбаро):

и горизонтальную дальность до маяка (наземного комплекта СПС):

где
D - наклонная дальность до маяка (наземного комплекта СПС);
Нист - истинная высота полета,
после чего определяют заданную высоту полета по «барометрической» глиссаде:

где ΔХ - расстояние от места установки наземного комплекта СПС до линии пересечения плоскости глиссады с землей,
и определяют «приборный» угол наклона «барометрической» глиссады (УНГпр):

где
X - горизонтальная дальность до маяка, вычисленная по формуле 6;
Нпр - высота полета по прибору,
и формируют сигнал отклонения от заданной глиссады снижения по формуле:

3. Способ захода на посадку летательного аппарата (ЛА) по п. 1, отличающийся тем, что для обеспечения резервного управления полетами при заходе на посадку ЛА дополнительно на рабочем месте диспетчера, по данным о дальности и высоте полета, полученным от наземного комплекта СПС, формируют глиссаду снижения в виде заданной высоты и в виде разницы между заданной и текущей высотами ЛА (и индицируют ее на индикаторе), по которой диспетчер определяет вертикальное отклонение от глиссады, а по данным о КУР и дальности, получаемым от наземного комплекта СПС, и по данным о КУР, получаемым от наземного УКВ-радиопеленгатора и индицируемым на индикаторе, диспетчер определяет боковое уклонение, дает команды управления голосом по радио, определяя по индикатору рассогласование между заданной и текущей траекториями полета.
4. Система посадки летательного аппарата с применением системы предупреждения столкновений (СПС), включающая в себя наземные ультракоротковолновые (УКВ) радиостанции, самолетное оборудование: УКВ-радиостанции, высотомеры, отличающаяся тем, что дополнительно на земле, перед торцом ВПП, устанавливают УКВ-радиопеленгатор, антенну командной УКВ-радиостанции, комплект системы предупреждения столкновений (СПС), код индивидуального опознавания которого опознается на борту ЛА как предназначенный для посадки, вычислитель заданной высоты и отклонения от заданной высоты, индикатор, связанный своими входами с выходами наземного комплекта СПС по каналам высоты, азимута, дальности, с выходами вычислителя заданной высоты и отклонения от заданной высоты по ΔН и Нзад, а также с выходом УКВ-радиопеленгатора, кроме того, указанный вычислитель связан своими входами с выходами наземного комплекта СПС по каналам дальности и измеренной высоты до ЛА, с выходами задатчиков температуры и давления воздуха у земли, а в комплект СПС, установленный на ЛА, радиотехнически связанный с аппаратурой наземного комплекта СПС, дополнительно включены дешифратор - блок опознавания кода посадки, связанный выходом с его входом блок задатчика кода посадки, вычислитель заданной высоты и вычислитель отклонения от заданной глиссады снижения 

| Микоян С.А | |||
| и др | |||
| Заход на посадку по приборам | |||
| Москва, Воениздат, 1979, с.27 | |||
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2003 |
|
RU2239203C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 1998 |
|
RU2199472C2 |
| FR 2897948 A1, 31.08.2007 | |||
| WO 2002068991 A1, 06.09.2002 | |||
| WO 2009023359 A3, 23.04.2009 | |||
| ТЕРМОРЕАКТИВНЫЕ ЭЛАСТОМЕРЫ | 1995 |
|
RU2159779C2 |

