Изобретение относится к космической области и может быть использовано в системах управления космических аппаратов (КА), содержащих силовые гироскопы (СГ) и реактивные двигатели (РД), для определения инерционных характеристик КА в процессе управления.
Работа систем управления маневрирующих орбитальных космических аппаратов непосредственно зависит от точности определения инерционных характеристик КА, к которым относятся положение центра масс, тензор инерции, масса КА. Поэтому определение инерционных характеристик КА актуально на этапе эксплуатации в условиях ограниченности энергетических ресурсов и предъявляемым к системе управления требованиям по динамике и точности управления.
Существуют различные способы определения инерционных характеристик находящегося на орбите КА. Известен способ определения инерционных характеристик КА на орбите [1] с помощью трехстепенных гироскопов, создающих управляющие моменты относительно центра масс КА. Определение тензора инерции КА сформулировано в терминах фильтра Калмана через вектор оценок, компенсаторами которого являются шесть единичных векторов элементов обратной матрицы инерции. К измеряемым величинам относятся матрица коэффициентов усиления, измерение и прогноз угловой скорости на некотором интервале времени Δt. Прогнозируемое значение угловой скорости определяется с учетом приложенных к КА моментов по крену, тангажу и рысканию.
В системе управления КА [1] для создания управляющих моментов использовались гироскопы с двумя рамками. Для упрощения задачи и минимизации движения КА оценка инерционных характеристик проводится путем поворота в каждый момент времени одной рамки гироскопа и сравнения прогнозируемого и измеренного изменений угловой скорости аппарата вследствие поворота рамки. Гироскопы ориентировались так, чтобы параллельные внешние рамки вращались относительно оси крена, а параллельные внутренние рамки - вокруг оси рыскания. Для гироскопа определяются моменты, возникающие вследствие поворота внутренней и внешней рамок. Импульсы моментов, создаваемые при вращении внутренней и внешней рамок с постоянной угловой скоростью, измерялись по углам поворота внутренней и внешней рамок в начале и конце данного интервала времени. При определении положения центра масс КА используется бортовой акселерометр, показания которого включают члены, обусловленные как поступательным, так вращательным движением аппарата. Величина смещения акселерометра относительно центра масс определяется измеренной угловой скоростью и ускорением с использованием фильтра Калмана, для нормальной работы которого необходима высокая точность измерений угловой скорости и ускорения.
Этот способ определения инерционных характеристик имеет ряд недостатков. Главный из них состоит в том, что требуется использование СГ с тремя степенями свободы. Такие гироскопы очень дороги, имеют сложную систему управления, а значит менее надежны. Они имеют большие массу и габариты по сравнению с одно- и двухстепенными гироскопами, что приводит к расходу большего количества топлива при выведении их на орбиту, а следовательно, увеличивает стоимость данной операции. Перечисленные недостатки значительно сужают круг КА, для которых этот способ применим, т.к. в настоящее время на большинстве КА используются более простые гироскопические устройства - маховики и гиродины.
Наиболее близкий из известных способов [2] включает измерение и прогнозирование движения центра масс космического аппарата по орбите, стабилизацию КА в инерциальной системе координат и поддержание неизменной его ориентации на интервале определения инерционных параметров, определение углового положения КА, измерение собственного кинетического момента гиродинов и определение инерционных параметров КА из условия равенства производных по времени компонент кинетического момента аппарата сумме действующих на аппарат гравитационного и восстанавливающего аэродинамического моментов.
Описанный способ определения инерционных характеристик обладает рядом недостатков. Он позволяет определять лишь недиагональные компоненты тензора и разность диагональных компонент и только при стабилизации аппарата в инерциальной системе координат. Положение центра масс КА в этом способе не определяется.
Задачей, решаемой предлагаемым способом, является определение положения центра масс и тензора инерции КА при управлении КА с помощью СГ, а также РД.
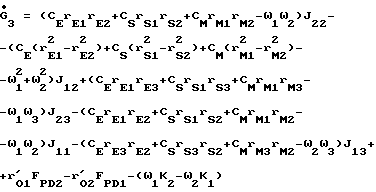
Поставленная задача решается тем, что в предлагаемом способе определения инерционных характеристик КА в процессе управления с помощью силовых гироскопов и реактивных двигателей, включающем измерение вектора состояния космического аппарата, построение ориентации космического аппарата в инерциальной системе координат и поддержание неизменной его ориентации на интервале определения инерционных параметров, определение ориентации космического аппарата в инерциальном пространстве на интервале поддержания ориентации, измерение значения собственного кинетического момента силовых гироскопов  и определение инерционных параметров космического аппарата из условия равенства производных по времени компонент кинетического момента аппарата сумме действующих на аппарат гравитационного и восстанавливающего аэродинамического моментов, в отличие от известного способа построение ориентации космического аппарата выполняют или в инерциальной, или в орбитальной системе координат, в которой поддерживают неизменной его ориентацию на интервале определения инерционных параметров, измеряют угловую скорость космического аппарата, с помощью реактивных двигателей создают возмущающий момент, имеющий отличные от нуля проекции на оси связанной с космическим аппаратом системы координат и, используя информацию об ориентации космического аппарата, времени начала и завершения работы реактивных двигателей, определяют все компоненты тензора инерции и положение центра масс космического аппарата из формулы
и определение инерционных параметров космического аппарата из условия равенства производных по времени компонент кинетического момента аппарата сумме действующих на аппарат гравитационного и восстанавливающего аэродинамического моментов, в отличие от известного способа построение ориентации космического аппарата выполняют или в инерциальной, или в орбитальной системе координат, в которой поддерживают неизменной его ориентацию на интервале определения инерционных параметров, измеряют угловую скорость космического аппарата, с помощью реактивных двигателей создают возмущающий момент, имеющий отличные от нуля проекции на оси связанной с космическим аппаратом системы координат и, используя информацию об ориентации космического аппарата, времени начала и завершения работы реактивных двигателей, определяют все компоненты тензора инерции и положение центра масс космического аппарата из формулы  , где
, где  ,
,  - суммарный кинетический момент космического аппарата
- суммарный кинетический момент космического аппарата  ,
,  - тензор инерции космического аппарата,
- тензор инерции космического аппарата,  - его угловая скорость,
- его угловая скорость,  - вектор суммарного момента внешних сил, действующих на космический аппарат,
- вектор суммарного момента внешних сил, действующих на космический аппарат,  - соответственно гравитационные моменты, вызванные влиянием на космического аппарат гравитационных полей Земли, Луны и Солнца;
- соответственно гравитационные моменты, вызванные влиянием на космического аппарат гравитационных полей Земли, Луны и Солнца;  - магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента космического аппарата,
- магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента космического аппарата,  - аэродинамический момент, обусловленный сопротивлением атмосферы
- аэродинамический момент, обусловленный сопротивлением атмосферы ,
, - аэродинамическая сила, возникающая при движении космического аппарата в атмосфере планеты,
- аэродинамическая сила, возникающая при движении космического аппарата в атмосфере планеты,  - момент от силы светового давления
- момент от силы светового давления  , который возникает при попадании потока солнечного света на космический аппарат
, который возникает при попадании потока солнечного света на космический аппарат  ,
,  - радиус-векторы центров давления, которые определяются расчетным путем по известной конфигурации космического аппарата и его положению относительно набегающего воздушного и светового потоков, соответственно,
- радиус-векторы центров давления, которые определяются расчетным путем по известной конфигурации космического аппарата и его положению относительно набегающего воздушного и светового потоков, соответственно,  - момент, возникающий в процессе работы реактивных двигателей
- момент, возникающий в процессе работы реактивных двигателей  ,
,  - вектор центра масс КА,
- вектор центра масс КА,  - вектор реактивного двигателя,
- вектор реактивного двигателя,  - вектор тяги работающего реактивного двигателя.
- вектор тяги работающего реактивного двигателя.
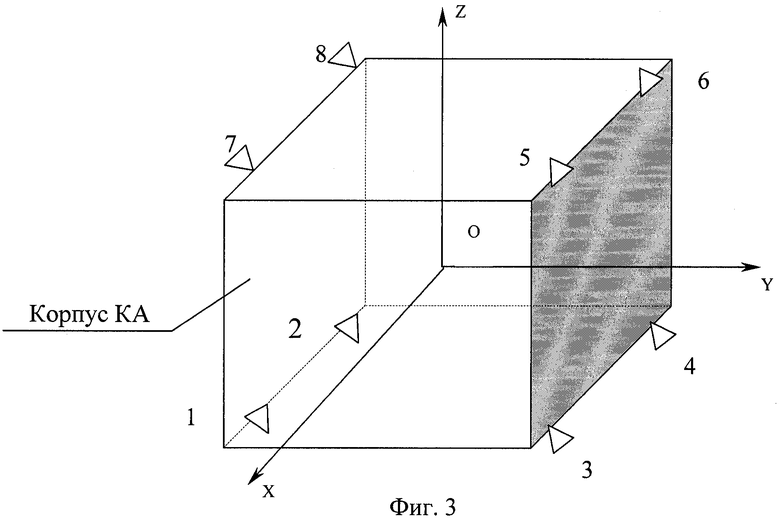
Сущность предлагаемого способа состоит в следующем. Строится определенная ориентация космического аппарата, которая поддерживается неизменной во время проведения измерений, необходимых для реализации рассматриваемого способа (о них подробно сказано далее). Ориентация космического аппарата выполняется в орбитальной или абсолютной системах координат с помощью силовых гироскопов. Для создания возмущающего воздействия на космический аппарат включаются реактивные двигатели, которые выбираются таким образом, чтобы проекции суммарного момента от тяг этих реактивных двигателей на все оси связанной с космическим аппаратом системы координат были отличны от нуля. Необходимо это для того, чтобы иметь возможность определять все координаты центра масс космического аппарата в этой системе координат. Т.к. ориентация космического аппарата поддерживается с помощью силовых гироскопов, то они реагируют на наличие возмущающего момента изменением своего кинетического момента. Анализ изменения этого возмущения дает возможность определения положения центра масс и тензора инерции КА.
Для пояснения сущности предлагаемого способа приводятся фиг. 1-3 и табл. 1-4.
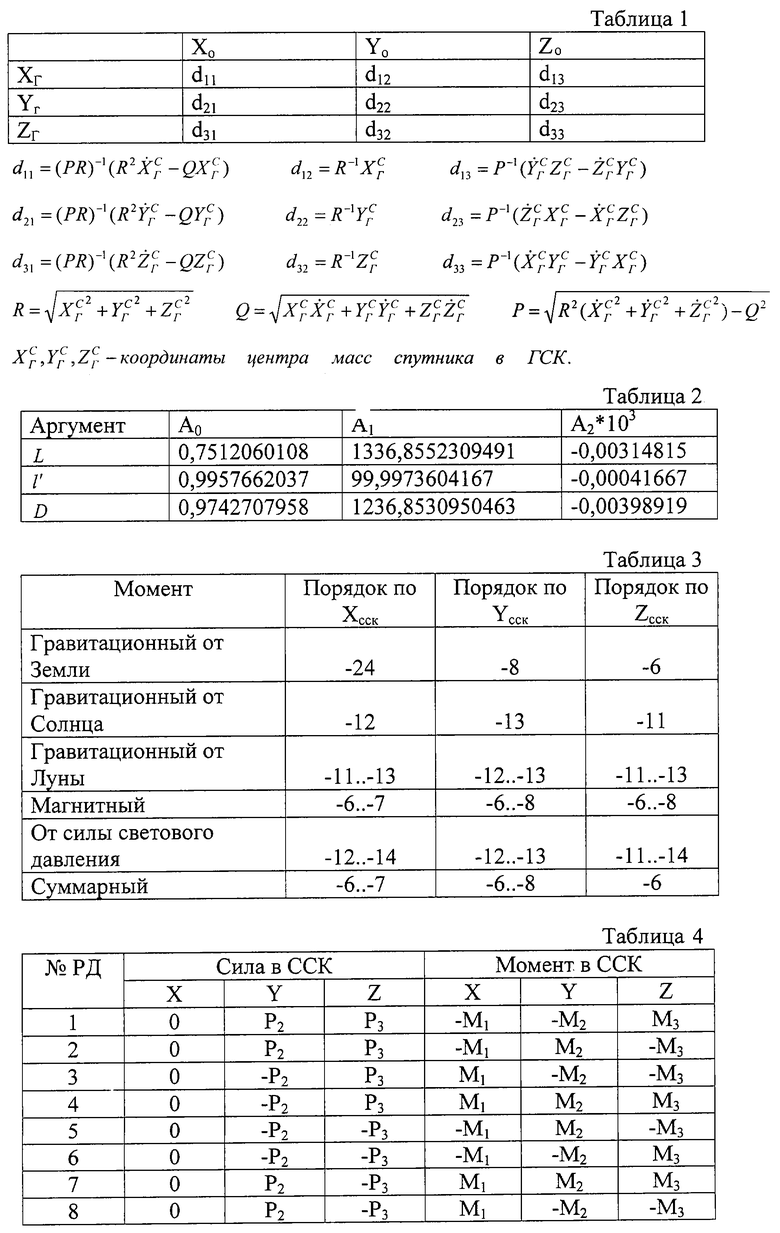
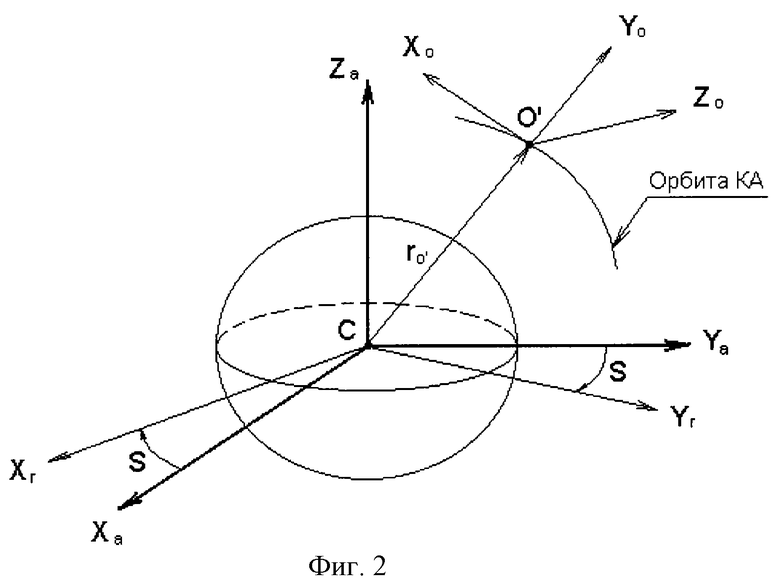
На фиг.1 показано положение системы координат с началом в центре масс КА (OX/Y/Z/) относительно строительной системы координат (OXYZ), а также координаты произвольной точки в обеих системах координат. На фиг.2 изображены абсолютная (CXaYaZa), гринвичская (CXгYгZг) и орбитальная (OXоYоZо) системы координат. Фиг.3 иллюстрирует корпус КА с размещенными на нем РД. В табл. 1 приводится матрица перехода между осями орбитальной и гринвичской систем координат. Табл. 2 содержит коэффициенты А0, А1, А2 в оборотах (1 оборот = 2 pi) для вычисления аргументов, необходимых для рассчета координат Солнца. В табл. 3 указан порядок основных моментов внешних сил, действующих на спутник при его движении по геостационарной орбите в штатной ориентации. В табл. 4 приведены проекции векторов управляющих сил (Рi) и моментов (Mi) на оси связанной с КА системы координат от каждого реактивного двигателя КА.
Для решения задачи определения инерционных характеристик КА введем несколько систем координат (СК).
Строительная система координат (ССК) - это жестко связанная с КА система координат, моделируемая на борту КА в БЦВМ (OXYZ).
Система координат (O/X/Y/Z/), оси которой параллельны осям ССК, но начало этой системы координат (т. О/) находится в центре масс КА (СКЦМ).
Вторая геоэкваториальная система координат (CXaYaZa), фиксированная на эпоху даты обрабатываемого временного интервала, - инерциальная система координат, начало которой (точка С) совпадает с центром Земли, ось СХa направлена в точку весны, а ось CZa - в Северный полюс мира. Ось CYa дополняет систему координат до правой. Плоскость CXaYa совпадает с плоскостью экватора в указанную эпоху.
Средняя орбитальная система координат (O/XoYoZo). Ось O/Хo направлена в сторону орбитального движения, ось О/Yo - по текущему радиусу-вектору спутника, ось O/Zo перпендикулярна плоскости орбиты и дополняет систему координат до правой.
Начало гринвичской системы координат (CXгYгZг) совпадает с центром Земли, ось СХг направлена в точку пересечения гринвичского меридиана с экватором, ось CZг - в Северный полюс Земли, ось CYг дополняет систему координат до правой.
Связь между второй геоэкваториальной (АСК) и гринвичской системой координат определяется следующими выражениями:
Хa=XгcosS-YгsinS
Ya=XгsinS+YгcosS
Zα=Zг
Здесь S - среднее звездное время.
При решении данной задачи начальные условия по вектору состояния задаются в гринвичской системе координат (ГСК). Переход от ГСК в АСК выполняется согласно приведенным ранее выражениям. Матрица перехода между осями орбитальной и гринвичской СК имеет вид, показанный в табл. 1.
Точкой обозначено дифференцирование по времени. Как следует из приведенных выражений, для расчета компонент этой матрицы необходимо определить вектор состояния КА, т.е. его координаты и скорость. Сделать это можно, например, моделируя движение КА, либо получив указанные параметры после обработки измеренной на борту соответствующей информации о движении КА, полученной от установленных на КА приборов (например, акселерометров), либо обработав аналогичную информацию от внешних источников информации (проведением радиоконтроля орбиты, от GPS и т.д.).
Чтобы получить полную информацию об ориентации КА во всех используемых в данной работе системах координат, осталось определить матрицу перехода от ССК к ОСК (А) или АСК(В) в зависимости от того, в какой системе координат стабилизируется КА. Элементы этой матрицы в случае движения КА расчитываются по углам Крылова (βy, βx, βz), задающим исходную ориентацию спутника в орбитальной или инерциальной системах координат.
Система уравнений, описывающих математическую модель движения КА относительно центра масс, может быть записана в следующем виде: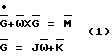
Здесь  - вектор суммарного кинетического момента КА;
- вектор суммарного кинетического момента КА;  - кинетический момент системы СГ;
- кинетический момент системы СГ;  - угловая скорость спутника;
- угловая скорость спутника;  - вектор суммарного момента внешних сил, действующих на КА;
- вектор суммарного момента внешних сил, действующих на КА;  - тензор инерции КА.
- тензор инерции КА.
Для КА, движущегося по орбите Земли, момент внешних сил может быть представлен в следующем виде:


Здесь  - соответственно гравитационные моменты, вызванные влиянием на ССС гравитационных полей Земли, Луны и Солнца;
- соответственно гравитационные моменты, вызванные влиянием на ССС гравитационных полей Земли, Луны и Солнца;  - магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента КА;
- магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента КА;  - аэродинамический момент, обусловленный сопротивлением атмосферы;
- аэродинамический момент, обусловленный сопротивлением атмосферы;  - орты векторов Земля-КА, Солнце-КА, Луна-КА;
- орты векторов Земля-КА, Солнце-КА, Луна-КА;  - радиус-вектор центра давления КА;
- радиус-вектор центра давления КА;  - единичные векторы, направленные противоположно ортам векторов линейной скорости КА и направления на Солнце, соответственно;
- единичные векторы, направленные противоположно ортам векторов линейной скорости КА и направления на Солнце, соответственно;  - тензор инерции КА; Сx - аэродинамический коэффициент КА; S - площадь миделя КА; ρ - плотность атмосферы; V - модуль линейной скорости КА; MPD - момент, возникающий в процессе работы РД,
- тензор инерции КА; Сx - аэродинамический коэффициент КА; S - площадь миделя КА; ρ - плотность атмосферы; V - модуль линейной скорости КА; MPD - момент, возникающий в процессе работы РД,  - радиус-вектор РД,
- радиус-вектор РД,  - сила, развиваемая РД.
- сила, развиваемая РД.
μE = 3,986032•105км3/c2
μS = 1,32715445•1011км3/c2 -
μM = 4,90264•105км3/c2
гравитационные параметры Земли, Луны и Солнца; RE, RS, RM - радиус-векторы Земли, Луны и Солнца;  - момент от силы светового давления
- момент от силы светового давления  , которая возникает при попадании потока солнечного света на спутник и при его отражении; S - площадь поперечного сечения КА; Е0 - мощность потока солнечного излучения; с - скорость света; r* - средний радиус орбиты Земли; Δ - расстояние от КА до Солнца; k - коэффициент отражения света поверхностью КА;
, которая возникает при попадании потока солнечного света на спутник и при его отражении; S - площадь поперечного сечения КА; Е0 - мощность потока солнечного излучения; с - скорость света; r* - средний радиус орбиты Земли; Δ - расстояние от КА до Солнца; k - коэффициент отражения света поверхностью КА;  - собственный магнитный момент КА;
- собственный магнитный момент КА;  - магнитное поле Земли.
- магнитное поле Земли.
Для расчета момента от силы светового давления и магнитного момента спутника необходимо знать координаты Солнца. Эти координаты можно определить, например, путем решения следующей системы уравнений:
Здесь l'= L'-pi - средняя аномалия Солнца; D=L-Lc - средняя элонгация Луны от Солнца; L - средняя долгота Луны на текущую дату; Lc - средняя долгота Солнца; ε - угол наклонения эклиптики к плоскости экватора Земли; Xc, Yc, Zc - геоцентрические координаты Солнца.
Аргументы L, D, l' вычисляются по формуле {L,l',D}=A0+A1Tэ+A2Tэ 2, а коэффициенты А0, А1, А2 в оборотах (1 оборот = 2 pi) указаны в табл. 2.
Для повышения точности расчетов коэффициенты A1 при Тэ представлены в виде A1=C'+D', где С' - целая часть А1, а D' - дробная часть коэффициента D.
Tэ - время от начала эпохи рассчитывается по следующей формуле  где
где  ; N0=N-1900; N - номер года, на который определяется эфемерида; d - число дней от 0-го января года, для которого ведутся вычисления; t - текущее время в выбранной дате.
; N0=N-1900; N - номер года, на который определяется эфемерида; d - число дней от 0-го января года, для которого ведутся вычисления; t - текущее время в выбранной дате.
При решении поставленной задачи предполагается, что положение РД и развиваемые ими тяги известны в ССК. Это предположение верно как для РД, жестко установленных на борту КА, так и для РД в кардановом подвесе. Тогда моменты от действия тяг РД в ССК определятся следующим образом (фиг.1):
Здесь  - вектор РД в ССК,
- вектор РД в ССК,  - вектор тяги РД в ССК.
- вектор тяги РД в ССК.
В СКЦМ момент от действия тяги РД с учетом того, что матрица перехода от ССК к СКЦМ единичная (в силу параллельности осей данных систем координат)

Таким образом, переходя к решению задачи в СКЦМ, вводим одну искомую величину - вектор центра масс КА  (фиг.1).
(фиг.1).
Запишем систему уравнений (1) в скалярной форме с учетом выражений (2), сгруппировав относительно искомых величин (компонент тензора инерции (J) и координат центра масс КА).
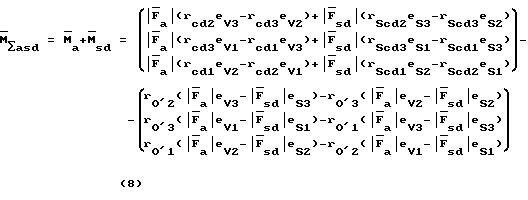
Аэродинамический момент, действующий на КА, движущийся в атмосфере в СКЦМ определим следующим образом: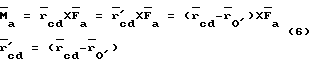

Момент от силы светового давления запишем в виде:

В приведенных выражениях для аэродинамического момента и момента от силы светового давления  - радиус-векторы центров давления КА в ССК, которые определяются расчетным путем по известной конфигурации КА в ССК и его положению относительно набегающего воздушного и светового потоков, соответственно,
- радиус-векторы центров давления КА в ССК, которые определяются расчетным путем по известной конфигурации КА в ССК и его положению относительно набегающего воздушного и светового потоков, соответственно,  - радиус- вектор центра давления КА в СКЦМ для расчета аэродинамического момента и момента от силы светового давления, соответственно.
- радиус- вектор центра давления КА в СКЦМ для расчета аэродинамического момента и момента от силы светового давления, соответственно.
Просуммировав аэродинамический момент и момент от силы светового давления, выделим члены с искомыми параметрами-компонентами вектора центра масс КА 
Обозначим
тогда
где 
Выражение для магнитного момента, являющегося результатом взаимодействия собственного магнитного момента КА и магнитного поля планеты, в скалярной форме примет вид:
Обозначим коэффициенты перед неизвестными компонентами тензора инерции КА в (5) следующим образом:

Движение КА происходит либо в орбитальной, в либо абсолютной системе координат. В первом случае угловая скорость КА равна орбитальной угловой скорости и может считаться постоянной величиной, во втором случае она равна нулю. Т. к. тензор инерции во время проведения измерений меняется не существенно, то его на этот период времени можно считать неизменным. Исходя из этого в уравнениях (5) можно перейти от дифференцирования полного кинетического момента КА по времени к дифференцированию по времени кинетического момента силовых гироскопов. Тогда с учетом (8/), (9) и (10) система уравнений (5) примет следующий вид:
где F1,1=F1,7=F2,4=F2,8=F3,6=F3,9=0
F2,1=-F1,2=F3,5=-F2,6
F1,3=-F3,1=F3,4=-F2,5
F1,4=-F1,6=-F2,2=F3,3
F1,8=-F2,7, F3,7=-F1,9, F2,9=-F3,8
F1,8=FPD3-b1, F1,9=FPD2-b2, F2,9=FPD1-b3


K1-K10=ΔK1, K2-K20=ΔK2, K3-K30=ΔK3
y=(y1, y2, y3)T=(ΔK1-F'(1), ΔK2-F'(2), ΔK3-F'(3))T
Здесь Кi, Кi0, i=1, 2, 3 - значения кинетического момента силовых гироскопов в конце и начале шага интегрирования уравнений, соответственно.
Введем вектор искомых величин:
x=(J11, J12, J13, J22, J23, J33, r'01, r'02, r'03)T
Матрица коэффициентов системы уравнений (5/) при неизвестных величинах примет вид:
Система уравнений (5/) в векторно-матричной форме запишется следующим образом:
Fx=y (5//)
В общем случае система может быть и несовместной. Вектор
x0=(J11 0, J12 0, J13 0, J22 0, J23 0, J33 0, r'01 0, r'02 0, r'03 0)T (6)
называется наилучшим приближенным решением системы уравнений (5//), если при значениях х= х0 квадратичное отклонение |y-Fx|2 достигает своего наименьшего значения и среди всех векторов х, для которых это отклонение имеет минимальное значение, вектор х0 имеет наименьшую длину, т.е. для этого столбца величина |x|2 имеет наименьшее значение.
Система уравнений всегда имеет одно и только одно наилучшее приближенное решение и это приближенное решение определяется по формуле
X0=F+y (7),
где F+ - псевдообратная матрица для матрицы F.
Вектор измерений y формируется из данных измерений угловой скорости КА, получаемой от датчиков угловой скорости КА, измеренных значениях кинетического момента силовых гироскопов, текущей информации об ориентации КА, времени начала и завершения работы РД, информации о значении собственного магнитного момента КА и магнитного поле Земли, размещения РД на борту КА, направлении и величине тяги, развиваемой каждым из включенных при проведении эксперимента РД, положении в СКЦМ КА Луны, Земли и Солнца. Эта же информация используется и для формирования матрицы коэффициентов F.
В общем случае вектор измерений у можно записать в виде
y=(y1 1, y2 1, y3 1, y1 2, y2 2, y3 2, ... y1 N, y2 N, y3 N)T, (8)
где N - число измерений, описанных ранее.
Т.о., получено решение задачи определения инерционных характеристик КА в общем виде. Рассмотрим более подробно это решение.
Для определения положения центра масс и компонент тензора инерции КА после построения ориентации КА необходимо в процессе ее поддержания на СГ обеспечить нескомпенсированное возмущающее воздействие на него со стороны РД, имеющее отличные от нуля проекции на оси СКЦМ КА. Это не всегда удается сделать, включив один и даже несколько РД в одном сеансе работы. Возможно возникновение ситуации, в которой для решения поставленной задачи требуется проведение нескольких сеансов измерений перечисленных выше параметров в различной ориентации КА при воздействии на него возмущений от работы различных ДО. Для определения инерционных параметров КА возможно как проведение специального сеанса измерений при работающих РД, так и в случае запланированного включения РД для решения задач, не связанных с определением инерционных характеристик КА, например для проведения коррекции орбиты КА. Для решения задачи определения инерционных характеристик КА в процессе управления с помощью силовых гироскопов и РД выполняется обработка статистической информации об угловой скорости КА, получаемой с борта КА от датчиков угловой скорости, измеренных значениях кинетического момента силовых гироскопов, текущей информации об ориентации КА, времени начала и завершения работы РД, используется информация о значении собственного магнитного момента КА и магнитном поле Земли, размещении РД на борту КА, направлении и величине тяги, развиваемой каждым из включенных при реализации предлагаемого способа РД, определяется положение в СКЦМ КА Луны, Земли и Солнца. Делается это следующим образом. На каждом шаге вычислений используются измеренные значения кинетического момента СГ в начале и конце шага, измеренные значения угловой скорости КА на данном шаге. Для определения магнитного момента, действующего на движущийся в магнитном поле Земли КА, либо измеряется магнитное поле Земли с помощью магнитометров, установленных на КА, либо рассчитывается по известным методикам, составленным на основе статистической информации. Используя известное значение собственного магнитного момента КА, по выражению (9) рассчитывается магнитный момент  . Коэффициенты матрицы, обусловленные влиянием на КА аэродинамического момента, рассчитываются по известной конфигурации КА, вектору скорости КА, плотности атмосферы по выражению (6).
. Коэффициенты матрицы, обусловленные влиянием на КА аэродинамического момента, рассчитываются по известной конфигурации КА, вектору скорости КА, плотности атмосферы по выражению (6).
Для определения коэффициентов, обусловленных влиянием момента от силы светового давления и гравитационного момента от Солнца, необходимо определить положение Солнца в СКЦМ. Сделать это можно двумя путями. Можно измерить координаты Солнца в ССК с помощью солнечных датчиков, установленных на борту КА, и, учитывая, что оси ССК и СКЦМ параллельны, а в силу большого расстояния от КА до Солнца и относительно небольших размеров КА по сравнению с расстоянием до Солнца можно считать, что векторы, проведенные из начала ССК и из начала СКЦМ к Солнцу, параллельны и, следовательно, без существенных потерь точности вычислений можно считать, что координаты Солнца в СКЦМ те же, что и координаты Солнца в ССК. Второй путь определения координат Солнца в СКЦМ - расчетный. По методике, описанной ранее, зная текущую дату и текущее время полета, используя выражения (а), рассчитываются координаты Солнца в АСК. Далее, зная ориентацию КА в АСК (или ОСК), осуществляется перевод вектора КА-Солнце в СКЦМ. Затем, используя полученные координаты Солнца в СКЦМ, рассчитывается положение в СКЦМ центра давления КА (геометрического центра КА с учетом направления на Солнце) и полученные значения подставляются в выражение (10) для расчета элементов матрицы коэффициентов F.
Зная положение КА на орбите, рассчитываются коэффициенты матрицы по (10) от гравитационных моментов, обусловленных влиянием Земли и Луны.
На каждом шаге вычислений формируется матрица коэффициентов F
где N - число измерений, описанных ранее, и вектор измерений y=(y1 1, y2 1, y3 1, y1 2, y2 2, y3 2, ... y1 N, y2 N, y3 N)T. Затем рассчитывается псевдообратная матрица F+ для матрицы F, например методом Гревилля последовательного нахождения псевдообратной матрицы, и по выражению х0=F+y находится наилучшее приближенное решение x0=(J11 0, J12 0, J13 0, J22 0, J23 0, J33 0,
r'01 0, r'02 0, r'03 0)T системы уравнений - инерционные характеристики КА, т. е. искомые значения положения центра масс и компоненты тензора инерции КА.
Нужно сказать, что могут существовать различные варианты реализации предлагаемого способа определения инерционных характеристик КА, обусловленные особенностями влияния на КА различных сил и моментов. К примеру, для низкоорбитальных КА влияние моментов от гравитации Луны и Солнца и момент от силы светового давления малы по сравнению с гравитационным моментом от Земли и аэродинамическим моментом. Так, например, для станции "Мир" порядок гравитационного и аэродинамического момента в зависимости от конфигурации составлял 5-6 Нм и 0,5-1,2 Нм соответственно, в то время как порядки остальных моментов внешних сил, перечисленных ранее, соответствовали 10-12-10-15. Для высокоорбитальных КА ситуация несколько иная. Например, для геостационарного спутника связи "Ямал" порядки различных моментов внешних сил приведены в табл. 3. Получены эти величины посредством моделирования движения этого спутника относительно центра масс. Константа гравитационного момента от Земли объясняется малым изменением точки "висения" спутника по отношению к Земле, неизменностью его ориентации и медленным изменением тензора инерции. Константа порядка гравитационного момента от Солнца объясняется прежде всего малым изменением расстояния до Солнца за виток. Гравитационные моменты от Солнца и Луны, а также момент от силы светового давления имеют один порядок и на разных участках орбиты могут либо суммироваться, либо компенсировать друг друга. Основное влияние на движение спутника относительно центра масс оказывает гравитационный момент от Земли и магнитный момент, обусловленный влиянием собственного магнитного момента спутника (прежде всего его солнечных батарей) и магнитного поля Земли. При этом, как видно из таблицы, в штатной ориентации магнитный момент по Хсск существенно превышает гравитационный, по Yсcк превышает или совпадает по порядку, а по Zccк либо соответствует гравитационному, либо меньше его на 2 порядка в зависимости от положения солнечных батарей (СБ). Естественно, что полный момент внешних сил, действующих на спутник, определяется в основном этими моментами - гравитационным от Земли и магнитным.
Проведенный анализ влияния на движение спутника различных моментов позволяет при использовании предлагаемого способа определения инерционных характеристик КА без существенных потерь точности ограничиться учетом влияния только гравитационного момента от Земли и магнитного момента.
Еще одна модификация предлагаемого способа связана с системой координат, в которой рассматривается движение КА. Если КА стабилизирован в АСК, то его угловая скорость относительно центра масс равна нулю, что существенно упрощает решение поставленной задачи, т.к. упрощаются выражения, описывающие движение КА относительно центра масс: ,
,
Естественно, что упрощаются и все выражения для расчета элементов матрицы коэффициентов (9), так как становятся равны нулю все составляющие, содержащие угловую скорость КА.
По сравнению с прототипом применение данного технического решения позволяет определить инерционные характеристики КА в процессе управления с помощью силовых гироскопов и реактивных двигателей для любого КА, который в качестве исполнительных органов системы управления использует СГ и РД. При этом не имеет значения, какие СГ используются для управления ориентацией КА (одно-, двух- или трехстепенные). Это обстоятельство значительно расширяет, по сравнению с рассмотренным ранее аналогом, круг КА, для которых предлагаемый способ применим. Кроме того, при решении задачи определения инерционных характеристик КА предлагаемым способом не имеет принципиального значения крепление РД к корпусу КА, т.е. предлагаемый способ применим как для РД, жестко установленных на корпусе КА, так и для РД в кардановом подвесе. Единственное условие, предъявляемое к РД при реализации предлагаемого способа определения инерционных характеристик КА, - это способность их обеспечить приложение к корпусу КА нескомпенсированного возмущающего момента, имеющего отличные от нуля проекции на оси связанной с КА системы координат.
Источники информации
1. Э. Бергменн, Дж. Дзиелски "Определение инерционных характеристик космического аппарата с помощью управляющих моментов". Journal of Guidance, Control and Dynamics, 1990, 1, pp.99-103.
2. Патент RU 2114031 C1.
3. Б. В. Раушенбах, Е. Н. Токарь "Управление ориентацией КА", Москва, "Наука", 1974 г.
4. Ф.Р. Гантмахер "Теория матриц", Москва, "Наука", 1988 г.
Изобретение относится к космической технике. Способ включает построение и поддержание заданной ориентации косметического аппарата (КА), измерение параметров движения КА, определение по измеренным параметрам положения центра масс КА. Поддержание ориентации КА выполняют с помощью силовых гироскопов (СГ), с помощью реактивных двигателей (РД) создают возмущающий момент, имеющий отличные от нуля проекции на оси связанной с КА системы координат, измеряют кинетический момент СГ, угловую скорость КА, его вектор состояния и по измеренным значениям кинетического момента СГ, угловой скорости КА и его вектору состояния, известному положению на космическом аппарате реактивных двигателей и создаваемых ими моментов определяют инерционные характеристики КА. Техническим результатом является возможность определения положения центра масс и тензора инерции КА при управлении КА с помощью СГ, а также РД, создающих возмущающие несбалансированные моменты относительно осей системы координат, жестко связанной с КА. 3 ил., 4 табл.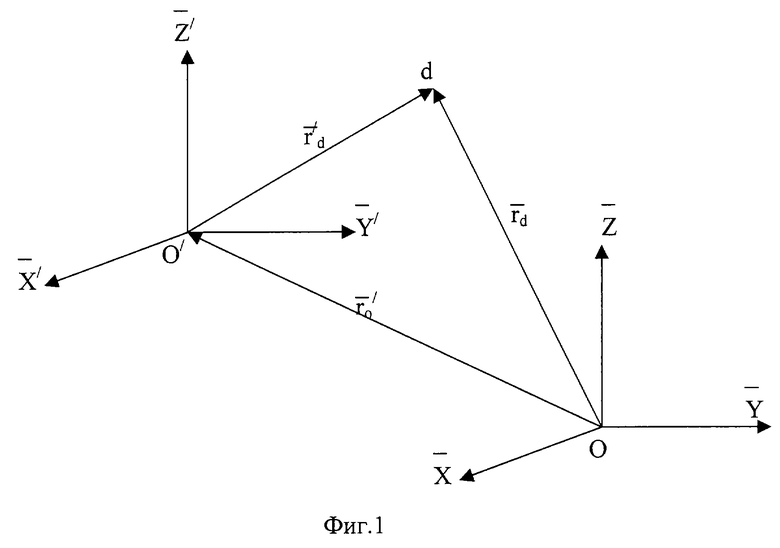
Способ определения инерционных характеристик космического аппарата в процессе управления с помощью силовых гироскопов и реактивных двигателей, включающий измерение вектора состояния космического аппарата, построение ориентации космического аппарата в абсолютной системе координат и поддержание неизменной его ориентации на интервале определения инерционных параметров, определение ориентации космического аппарата в инерциальном пространстве на интервале поддержания ориентации, измерение значения собственного кинетического момента силовых гироскопов  и определение инерционных параметров космического аппарата из условия равенства производных по времени компонент кинетического момента аппарата сумме действующих на аппарат гравитационного и восстанавливающего аэродинамического моментов, отличающийся тем, что построение ориентации космического аппарата выполняют или в абсолютной, или в орбитальной системе координат, в которой поддерживают неизменной его ориентацию на интервале определения инерционных параметров, измеряют угловую скорость космического аппарата, с помощью реактивных двигателей создают возмущающий момент, имеющий отличные от нуля проекции на оси связанной с космическим аппаратом системы координат и, используя информацию об ориентации космического аппарата, времени начала и завершения работы реактивных двигателей, определяют все компоненты тензора инерции и положение центра масс космического аппарата из формулы
и определение инерционных параметров космического аппарата из условия равенства производных по времени компонент кинетического момента аппарата сумме действующих на аппарат гравитационного и восстанавливающего аэродинамического моментов, отличающийся тем, что построение ориентации космического аппарата выполняют или в абсолютной, или в орбитальной системе координат, в которой поддерживают неизменной его ориентацию на интервале определения инерционных параметров, измеряют угловую скорость космического аппарата, с помощью реактивных двигателей создают возмущающий момент, имеющий отличные от нуля проекции на оси связанной с космическим аппаратом системы координат и, используя информацию об ориентации космического аппарата, времени начала и завершения работы реактивных двигателей, определяют все компоненты тензора инерции и положение центра масс космического аппарата из формулы
где
 - суммарный кинетический момент космического аппарата
- суммарный кинетический момент космического аппарата  ;
; - тензор инерции космического аппарата;
- тензор инерции космического аппарата; - его угловая скорость;
- его угловая скорость; - вектор суммарного момента внешних сил, действующих на космический аппарат;
- вектор суммарного момента внешних сил, действующих на космический аппарат; - соответственно гравитационные моменты, вызванные влиянием на космического аппарат гравитационных полей Земли, Луны и Солнца;
- соответственно гравитационные моменты, вызванные влиянием на космического аппарат гравитационных полей Земли, Луны и Солнца; - магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента космического аппарата;
- магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента космического аппарата; - аэродинамический момент, обусловленный сопротивлением атмосферы
- аэродинамический момент, обусловленный сопротивлением атмосферы  ;
; - аэродинамическая сила, возникающая при движении космического аппарата в атмосфере планеты;
- аэродинамическая сила, возникающая при движении космического аппарата в атмосфере планеты; - момент от силы светового давления
- момент от силы светового давления  , который возникает при попадании потока солнечного света на космический аппарат
, который возникает при попадании потока солнечного света на космический аппарат  ;
; - радиус - векторы центров давления, которые определяются расчетным путем по известной конфигурации космического аппарата и его положению относительно набегающего воздушного и светового потоков соответственно;
- радиус - векторы центров давления, которые определяются расчетным путем по известной конфигурации космического аппарата и его положению относительно набегающего воздушного и светового потоков соответственно; - момент, возникающий в процессе работы реактивных двигателей
- момент, возникающий в процессе работы реактивных двигателей  ;
; - вектор центра масс КА;
- вектор центра масс КА; - вектор реактивного двигателя;
- вектор реактивного двигателя; - вектор тяги работающего реактивного двигателя.
- вектор тяги работающего реактивного двигателя.
| RU 2053939 C1, 10.02.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ СБОРКИ КОСМИЧЕСКИХ ОБЪЕКТОВ В ПРОЦЕССЕ ИЗМЕНЕНИЯ ПАРАМЕТРОВ ОРБИТЫ | 1996 |
|
RU2098326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ ЕГО УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ПРИВОДОВ | 1997 |
|
RU2114031C1 |
| US 6152403 A, 28.11.2000. | |||

